深弹自导过程的波束相关处理仿真
2021-05-08陈韶华
邱 涛,陈韶华
(中国船舶重工集团有限公司第七一〇研究所,湖北 宜昌 443003)
0 引言
深弹自导性能是决定精确打击目标的关键,通过理论分析与仿真研究自导算法的测向测距性能是算法性能评估的重要方向[1-4]。结合工程实际,设计合理的深弹自导过程,利用过程仿真来验证算法的适用性,可以降低试验成本,提高效率,为算法提供理论基础。
本文首先通过深弹自导运动态势假设,建立了深弹自导的初始条件。据此仿真信号的参数和体制[5-6],基于波束域相关开展自导过程仿真[7],利用时延估计方法[8]得出自导过程目标方位仿真结果,对比验证算法的有效性。
1 波束域相关处理
图1是平面阵等效波束分布图,波束间距为d。根据平面阵阵形和阵元几何位置来生成阵元仿真信号,并综合考虑声盲区对仿真信号脉宽的要求、相对运动多普勒频移等对测向的影响、信混比对信号幅值大小的影响,设计出对应不同距离要求的信号脉宽、不同相对运动速度下的频率、不同信混比下的信号幅值,以此得到随自导环境(位置、相对运动速度)变化的仿真信号。通过波束域相关处理、过门限检测后估计时延来测向测距。
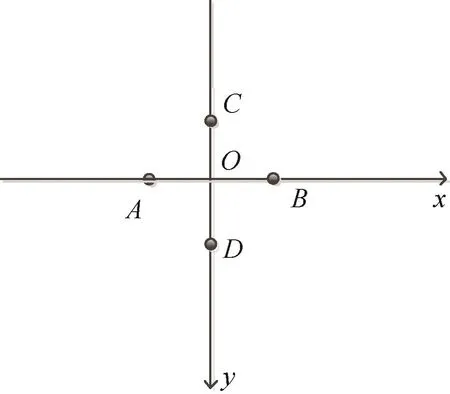
图1 平面阵等效波束示意图Fig.1 Schematic diagram of equivalent beam of planar array
设水平A和B波束求得的时延为1τ,垂直A和C波束求得的时延为2τ,远场声源入射方位角与俯仰角分别为φ与θ,与x轴与y轴的夹角分别为α与β,如图2所示。
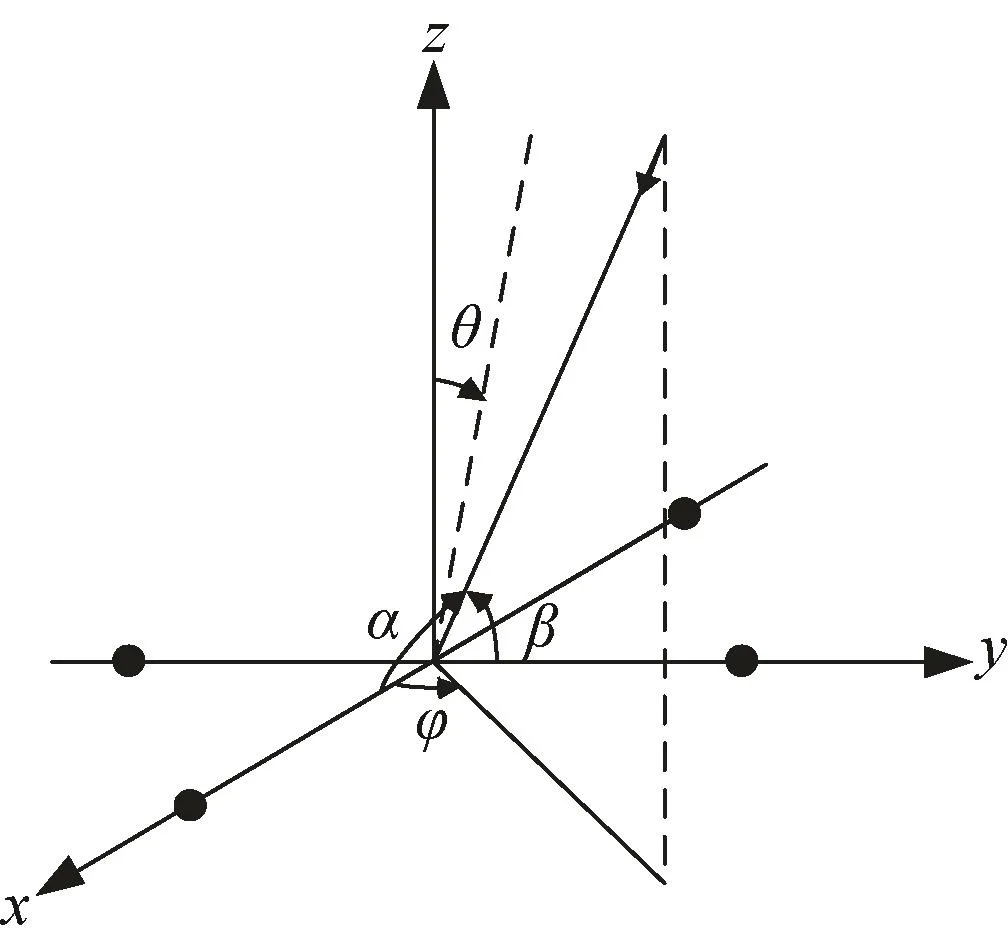
图2 目标方位示意图Fig.2 Schematic diagram of target location
根据几何投影关系,有:


根据声呐方程,可以计算出等效波束对体积混响和海底混响的信混比。
体积混响可表示为

海底混响表示为

体积混响条件下的信混比:

海底混响条件下的信混比:

检测阈根据信号参数计算,一般在6 dB以上。可见海底混响的信混比较低,在混响背景下检测回波信号很困难,因此考虑采用长CW脉冲,通过多普勒归零补偿技术抑制混响,避免混响背景,从而在噪声背景中检测信号。
2 态势假设与仿真分析
2.1 态势假设
深弹入水下沉舷侧阵搜索目标,确定目标大致方位后,自导系统启动,头部阵工作,开始跟踪目标。如图3所示,设定基阵与目标的初始水平距离与初始垂直距离,以及弹垂直下沉速度与导向目标速度、目标运动速度,目标作匀速直线运动。将运动过程分割短时处理,弹在短时间内的运动可看作为是朝着锁定目标方向直线运动。根据实际弹自导能力,将弹自导偏转角度限定在20°内。弹入水后,下沉舷侧阵搜索目标,连续多次搜索到目标后,确定目标的大致方位,然后开始导向目标。
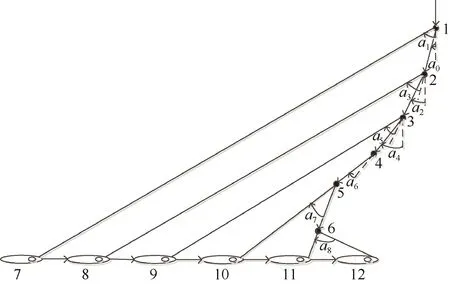
图3 导引运动轨迹示意图Fig.3 Schematic diagram of moving trace
图3中,在位置1舷侧阵连续多次搜索到目标,此时位置7的目标的俯仰角1α=63.43°。弹进入头部阵搜索阶段,偏转角度0α=20°,运动2 s后到位置 2。目标运动到位置 8,测得目标的俯仰角3α=44.47°,弹偏转20°运动,2α=40°,2s后运动到位置3。目标运动到位置9,测得目标的俯仰角5α=24.96°,弹偏转20°运动,4α=60°,2s后运动到位置4。目标运动到位置10,测得目标的俯仰角6α=4.63°,俯仰角小于20°。此后弹运动轨迹沿着测得的目标方向变化,一段时间间隔计算一次目标俯仰角。设仿真时间间隔为2 s,短时间内弹运动可近似为直线运动,将目标的初始位置设为(0,200),弹入水位置为(400,0),得到自导全过程中目标与弹运动轨迹图,见图4。在图4中,弹和目标最终交会(距离小于10 m,认定为交会),弹和目标的运动态势假设合理。

图4 目标与弹运动过程Fig.4 Moving process of target and charge
2.2 仿真分析
根据2.1节中态势假设可以计算出自导过程中俯仰角的几何值,假定仿真目标初始方位角为π/2,为模拟弹下沉和自导过程中弹体旋转,仿真时俯仰角在几何值的基础上加上随机误差πrandn(1)/60,方位角在π/2基础上加上随机误差πrandn(1)/36,并从自导起始位置开始迭代。

图5 等效4波束信号Fig.5 Signals of 4-beam equivalent

图6 多普勒频移内过门限检测Fig.6 Over threshold detection within Doppler shifts
根据最大线谱多普勒频移内过门限的方法,可以得到自导全过程中目标方位和距离,将结果与几何值比对,见图7-11。
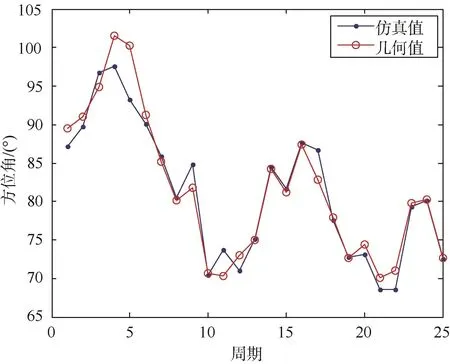
图7 目标方位角仿真结果与几何值对比Fig.7 Comparison results of target azimuth angle simulation with geometry
从图7可知,加入随机误差模拟弹体旋转,会使整个自导过程中目标方位角一直改变。除了位置5外,其余目标方位角仿真结果与几何值的差值小于5°,仿真方位角的变化规律与几何值基本相同。在图8中,弹自导前期,由于航速和控制能力限制,几何态势设定时将偏转角度限制在20°以内,贴合实际运动情况,仿真得的目标俯仰角较大。当俯仰角小于20°后,进入导引跟踪阶段后仿真得到的目标俯仰角小于 15°。除了位置 15以外,目标俯仰角仿真结果与几何值差值小于 5°,在误差允许范围内。图9和图10是根据方位角和俯仰角计算得到的目标上下角和左右角对比结果,可以看出仿真结果与几何设定值差值在 3°以内。图 11是取过门限最大线谱求得的弹目距离,不同位置的距离仿真值均大于几何设定值,差值小于1/4脉宽距离。
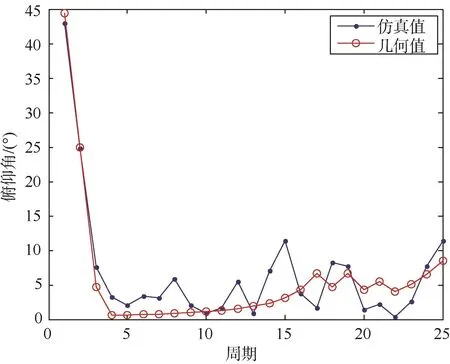
图8 目标俯仰角仿真结果与几何值对比Fig.8 Comparison results of target pitch angle simulation with geometry

图9 目标左右角仿真结果与几何值对比Fig.9 Comparison results of target left and right angle simulation with geometry

图10 目标上下角仿真结果与几何值对比Fig.10 Comparison results of target top and bottom angle simulation with geometry

图11 目标与弹的距离仿真结果与几何值对比Fig.11 Comparison results of target distance simulation from charge with geometry
从几何态势几何值与仿真结果对比可知,除个别点外,测向的仿真结果与几何值差值小于 5°,测距误差小于cT/4(T为信号脉宽,c为声速),表明波束域相关测向测距方法可行。从俯仰角来看,进入导引跟踪阶段后,目标的俯仰角小于15°,在等效波束范围内。
3 湖上试验数据验证
2019年进行了湖上试验,试验采用自导声基阵平台,利用目标特性回波模拟装置在不同距离发射CW脉冲,采用波束域相关方法对回波信号进行检测和分析。
图12为实测等效4波束信号,对检测到回波信号进行分周期分析,将距离与GPS记录值对比,结果见图13。
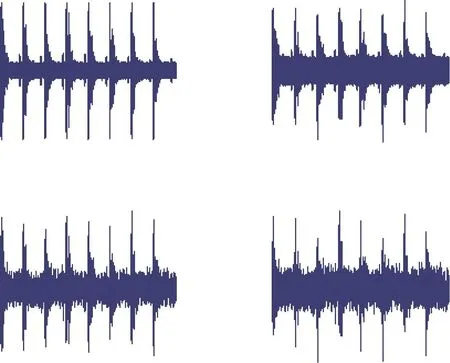
图12 实测等效4波束信号Fig.12 Experimental signals of 4-beam equivalent

图13 距离实测值与GPS记录值对比Fig.13 Differences of distance between measured value with GPS value
从图13可知,在检测到回波周期中,距离实测值与GPS记录值差值小于15 m,试验时由于水流影响,会导致试验搭载平台位置时刻发生改变,但测距误差在允许范围内。利用波束域相关方法可以较为准确地测量回波距离。
4 结束语
本文采用CW脉冲信号仿真研究了深弹自导过程中目标方位和距离的估计方法。仿真结果表明:测向误差小于5°,距离估计与几何值基本吻合,等效波束域相关测向测距方法有效,实测数据处理也侧面验证了此方法在工程应用上可行。下一步将对更多实测数据进行分析,进一步验证与优化信号处理方法。
