O形与C形臂引导下胸腰椎骨折内固定术的比较△
2021-05-07卢慧,陈洁*
卢 慧,陈 洁*
(1.苏州市中西医结合医院疼痛科,江苏苏州215101;2.苏州大学附属第一医院骨科,江苏苏州215006)
随着微创脊柱手术(minimally injury spine sur⁃gery,MISS)理念逐步应用于骨科手术治疗中,胸腰椎骨折闭合复位内固定技术获得了进一步的发展[1],而在临床实际应用中,为了使手术操作更加精准、微创和安全,往往需要影像系统的辅助:如C形臂、O形臂等[2]。既往研究认为相比于传统的C形臂、O形臂导航系统具有缩短手术时间、操作更加直观等特点[3-6],但O形臂在胸腰椎骨折闭合复位内固定术中的安全性及精确性仍未见系统报道。因此,本文观察并对比两种不同的影像系统针对同一手术方式的手术指标及预后等因素的影响,以探讨该技术在胸腰椎骨折微创治疗领域的应用价值。
1 临床资料
1.1 一般资料
回顾性分析本院收治的79例行胸腰椎骨折患者,均予以闭合复位内固定术且获有效随访。依据术中影像介导的方式随机分为C形臂组和O形臂组。两组患者性别、年龄、受伤机制、损伤节段及骨折分型,差异均无统计学意义(P>0.05)。
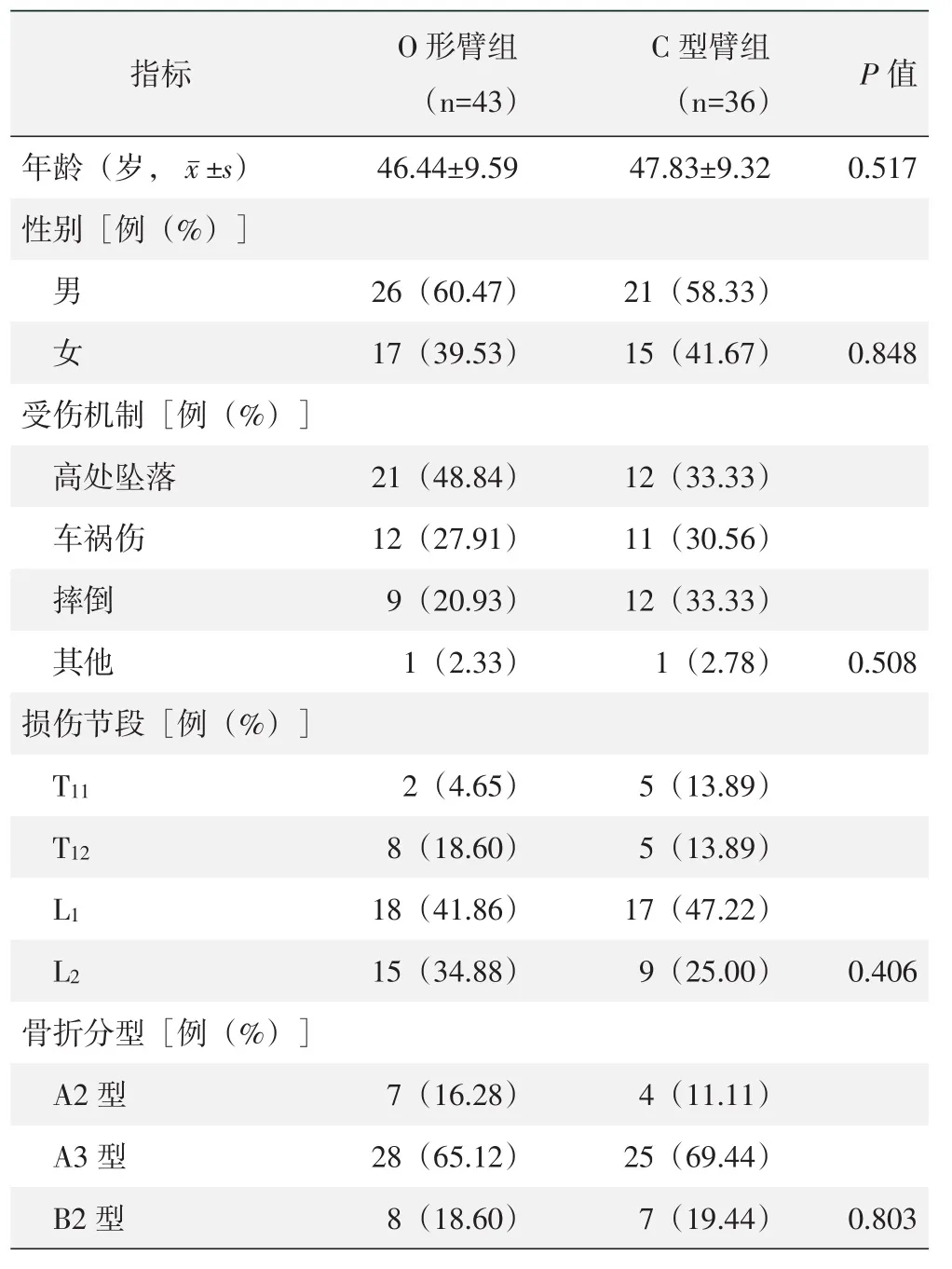
表1 两组患者一般资料与比较
1.2 手术方法
C形臂组:全麻成功后,取俯卧位,固定于Jackson碳素纤维手术台上,C形臂透视获得以患椎为中心的正侧位图像,参照图像确定大致进针点并做标记,常规消毒铺巾,在标记处用尖刀做一长约2.0 cm纵形切口,钝性分离多裂肌及最长肌,暴露上、下关节突位置,确认相应椎体开口位置,用开口器开口,开路器扩开钉道,探针探查确定钉道均位于椎弓根皮质内,测量探针长度,丝锥攻丝,将椎弓根螺钉拧入适当深度,C形臂透视确定椎弓根螺钉进钉方向及深度是否合适,并予以调整。同理依次置入其他螺钉。裁剪合适长度的连接棒,预弯后经皮下置入,拧入螺钉尾帽。对骨折椎体撑开复位,拧紧螺钉尾帽,C形臂再次透视,确认椎体高度恢复满意,椎弓根螺钉位置佳。
O形臂组:全麻成功后,取俯卧位,固定于Jackson碳素纤维手术台上,常规消毒铺巾。在后正中线以患椎上一椎体棘突为中心做一长约2.0 cm纵行切口,切开皮肤及皮下软组织,暴露该椎体棘突。将参考架夹具固定于棘突上,O形臂扫描快速获取脊柱三维图像,并将三维数据传输至StealthStation系统中,移动Passive Planar Probe,通过O形臂导航系统确定椎弓根螺钉进钉点,轻压皮肤形成压痕作为标记,在标记处用尖刀做一长约2.0 cm纵形切口,钝性分离多裂肌及最长肌,置入已注册的Universal Drill Guide头端,调整头尾及左右倾角,使其投影与椎弓根轴线重叠,退出Universal Drill Guide,用开口器于进钉点开口,用开路器沿上述倾角扩开钉道,探针探查确定钉道均位于椎弓根皮质内,测量探针长度,丝锥攻丝,拧入椎弓根螺钉。同理依次置入其他螺钉。裁剪合适长度的连接棒,预弯后经皮下置入,拧入螺钉尾帽。对骨折椎体撑开复位,拧紧螺钉尾帽,O形臂再次扫描,确认椎体高度恢复满意,椎弓根螺钉位置佳。
1.3 评价指标
分别记录并比较两组患者手术时间、出血量、螺钉置入时间、螺钉置入数、螺钉调整次数、透视次数、术后并发症等指标。术后1周复查X线片及CT,比较术前及术后椎体高度百分比、后凸Cobb角,并通过Richter评分评价螺钉置入精度。比较两组术前、术后1周及术后6个月VAS评分以评价临床疗效。
1.4 统计学方法
采用SPSS 16.0软件进行统计学分析。计量资料以均数±标准差表示,组间比较采用独立样本t检验;计数资料以百分比(%)表示,组间比较采用x2检验;等级资料采用秩和检验。P<0.05为差异有统计学意义。
2 结 果
2.1 临床结果
两组患者出血量、螺钉置入数差异无统计学意义(P>0.05);而O形臂组手术时间、螺钉置入时间、螺钉调整次数及透视次数明显小于C形臂组。两组患者经手术治疗后均能明显缓解疼痛,且随着时间的推移,患者的VAS评分呈递减趋势,但两组之间对比差异无统计学意义(P>0.05)(表2)。并发症方面:C形臂组1例螺钉位置不良,椎弓根螺钉突破内侧皮质进入椎管,术中丝锥攻丝扩大骨性钉道时,钉道溢出少量清亮脑脊液,术后即出现神经根刺激症状,予以脱水、神经营养等对症处理,患者症状缓解,术后随访无异常。O形臂组1例术后10 d左下肢稍肿胀,经下肢动静脉彩超确诊为下肢深静脉肌间血栓形成,介入科会诊后予以对症治疗,后期随访良好。典型病例影像见图1。
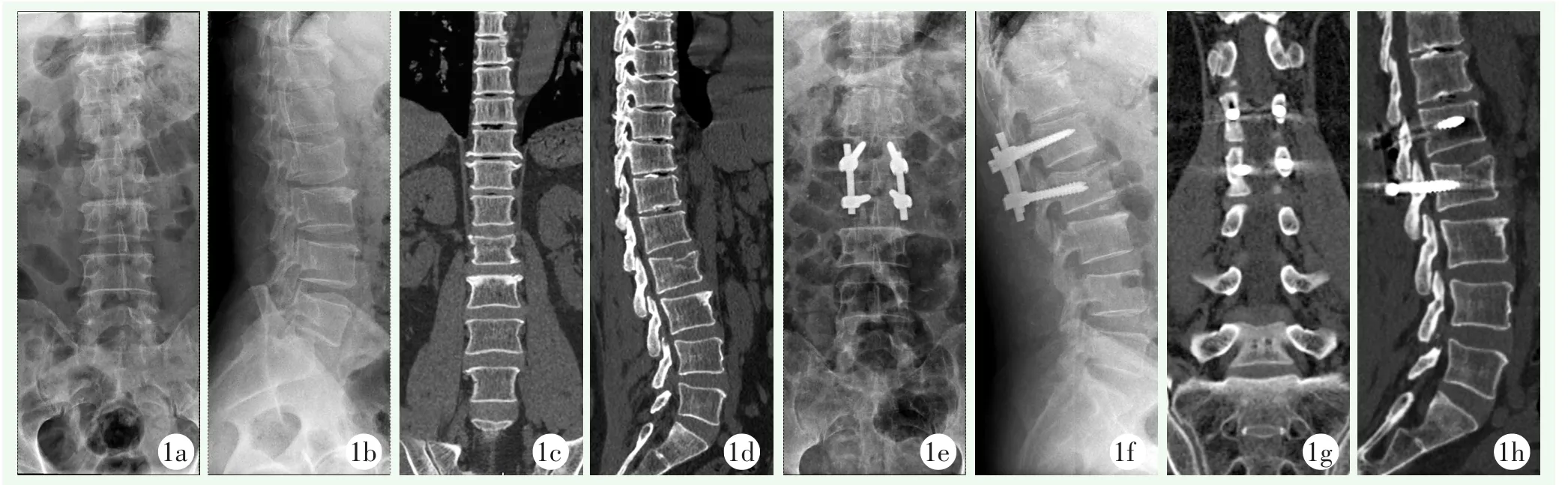
图1 患者,男,61岁,车祸伤,L2椎体骨折 1a,1b:术前腰椎正侧位X线片示L2椎体骨折 1c,1d:术前CT示L2椎体上缘不完全性爆裂性骨折 1e,1f:术后1周复查腰椎正侧位X线片示骨折复位可 1g,1h:术后复查CT示L2右侧螺钉突破椎弓根内侧皮质进入椎管
表2 两组患者临床结果(±s)与比较
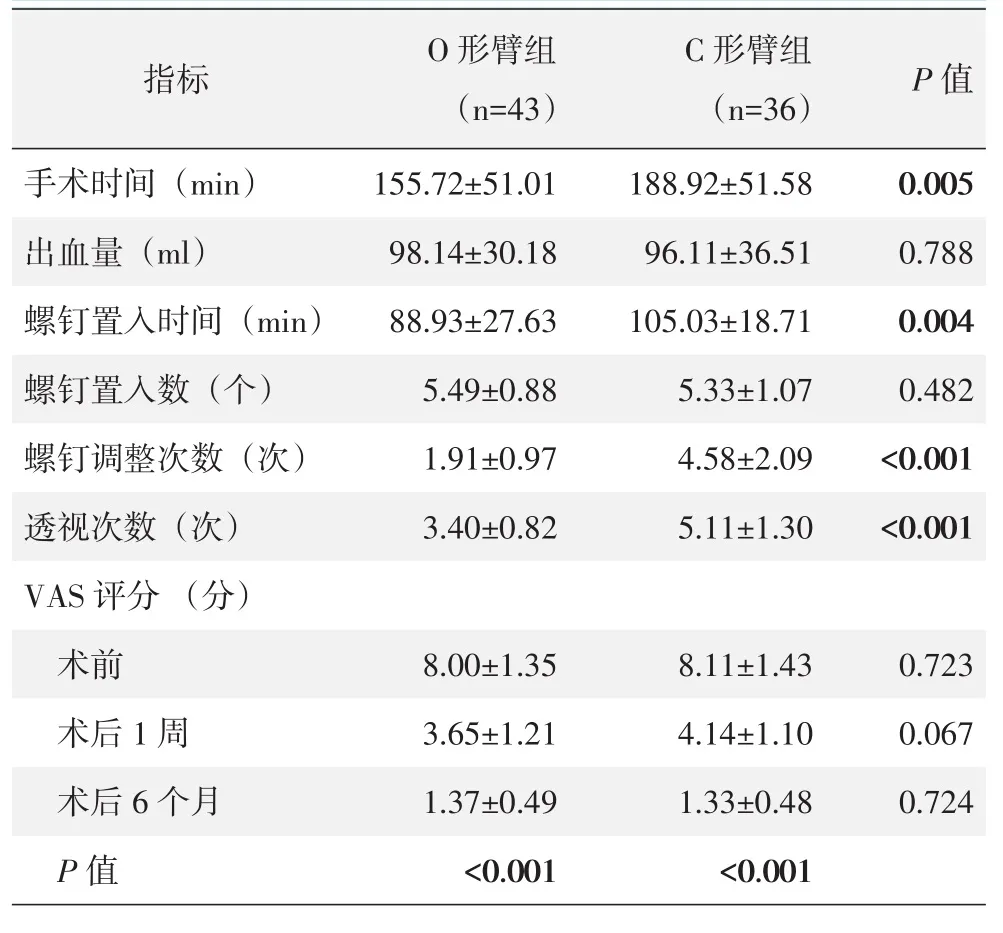
表2 两组患者临床结果(±s)与比较
指标P值O形臂组(n=4 3)1 5 5.7 2±5 1.0 1 9 8.1 4±3 0.1 8 8 8.9 3±2 7.6 3 5.4 9±0.8 8 1.9 1±0.9 7 3.4 0±0.8 2 C形臂组(n=3 6)1 8 8.9 2±5 1.5 8 9 6.1 1±3 6.5 1 1 0 5.0 3±1 8.7 1 5.3 3±1.0 7 4.5 8±2.0 9 5.1 1±1.3 0 0.0 0 5 0.7 8 8 0.0 0 4 0.4 8 2<0.0 0 1<0.0 0 1手术时间(m i n)出血量(m l)螺钉置入时间(m i n)螺钉置入数(个)螺钉调整次数(次)透视次数(次)V A S评分 (分)术前术后1周术后6个月P值8.0 0±1.3 5 3.6 5±1.2 1 1.3 7±0.4 9<0.0 0 1 8.1 1±1.4 3 4.1 4±1.1 0 1.3 3±0.4 8<0.0 0 1 0.7 2 3 0.0 6 7 0.7 2 4
2.2 影像评估
两组患者术后椎体前缘高度百分比较术前明显增高,两组患者术后Cobb角较术前均明显减小,而两组之间差异无统计学意义(P>0.05)。椎弓根螺钉置入精度:C形臂组及O形臂组分别置入192枚和236枚椎弓根螺钉,其中Ⅰ级、Ⅱ级、Ⅲ级螺钉所占比例如表3所示。可见O形臂组中Ⅰ级螺钉的比例明显高于C形臂组。
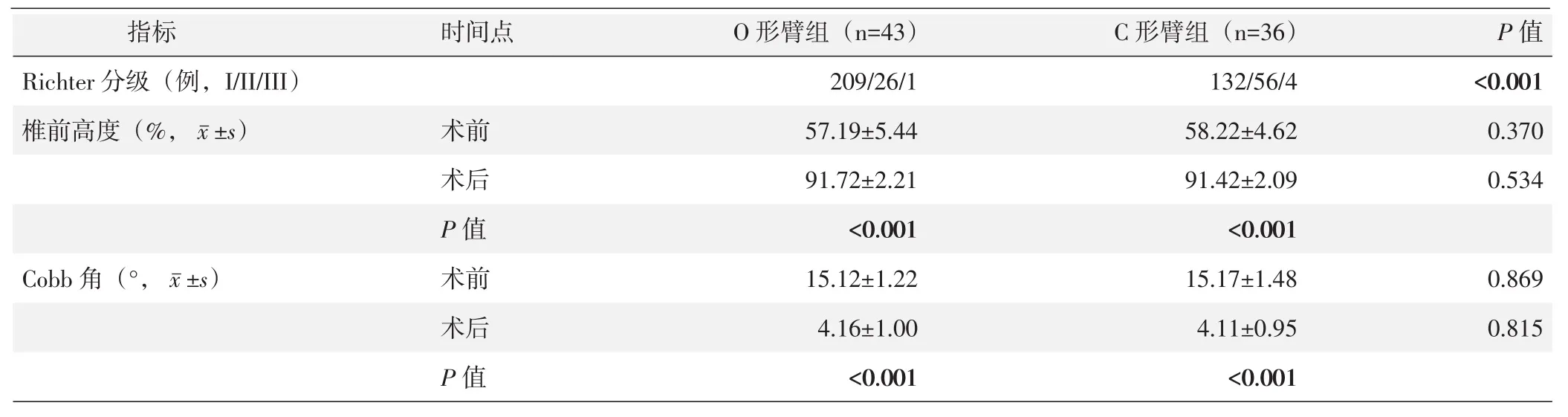
表3 两组患者不同时间点影像测量结果与比较
3 讨论
传统椎弓根螺钉置入主要依赖局部骨性标志定位及临床经验,因此在手术操作中存在一定的失误率,尤其是在脊柱侧弯、后凸畸形等特殊情况下更是增加了螺钉置入的难度[8]。O形臂导航系统通过立体定位与虚拟成像技术的结合,可以实时显示手术器械与局部解剖结构之间的关系,使椎弓根螺钉精准安全的置入成为可能,有效减少了置入过程中的风险[9,10]。本研究发现O形臂导航系统的使用可以有效减少手术时间,得益于该系统可以在短时间内获得高质量的三维重建图像,自动注册后即可实时观察手术器械与解剖结构的相对位置,因此在两组患者螺钉置入数量未见明显差异的情况下,O形臂导航系统明显减少了椎弓根螺钉的调整次数,从而有效减少了手术过程中椎弓根螺钉置入这一关键步骤的时间。同时,O形臂导航系统在椎弓根螺钉置入精度方面也凸显了自身优势,O形臂组Ⅰ级螺钉的占比相比于C形臂组明显增加,说明在导航系统的帮助下,更多的椎弓根螺钉可以准确的置入椎弓根内,螺钉的轴线与椎弓根的轴线更加吻合,从而减少了椎弓根螺钉突出骨性结构后对周围组织产生影响。同时,在实际应用中发现在置入部分远离参考架夹的椎弓根螺钉时,三维导航成像更易出现“漂移现象”[11],考虑可能是由于手术过程中牵拉软组织导致参考架夹移位、患者躯体被推挤等因素导致[12]。所以在手术过程中,并不能完全盲从重建图像,应及时发现导航成像是否发生漂移,若>3 mm则应立即终止导航,适当将参考架夹移至离置入螺钉的椎体更近的棘突上,重新扫描,即可予以纠正。
综上所述,O形臂导航系统应用于胸腰椎骨折闭合复位内固定术中可以明显缩短手术时间,并使椎弓根螺钉置入更加安全、精准,因此O形臂导航系统在脊柱微创治疗领域的应用具有广阔的前景。
