刚软结合可穿戴手部康复装置设计
2021-05-07王明昊水生财
刘 冬 王明昊 毕 聪 水生财 丛 明 杜 宇
1.大连理工大学机械工程学院,大连,1160242.大连大华中天科技有限公司,大连,116023
0 引言
近年来,由中风等疾病引起的手部功能丧失的患者人数逐年上升。对于这类患者,除一般药物治疗外,还需辅以抓、握和捏等手部运动功能的恢复治疗。手部康复装置就是对手部功能障碍患者进行康复治疗和日常生活辅助的设备[1]。国内外研究人员对其结构和控制等方面进行了研究[2],相继提出了基于连杆传动[3-5]、绳索传动[6]等结构的外骨骼手部康复装置,但这类刚性手部可穿戴康复装置柔性不足、与手指贴合性较差,容易造成患者手指发生侧弯或者扭转,造成二次伤害。
近年来,软体手部康复装置具有贴合性好、自由度高、安全性好等优点[7]受到国内外研究人员广泛关注。POLYGERINOS等[8]设计了一种可穿戴式手部软体康复装置,该装置执行器部分由硅胶与限制层材料粘合制成,采用气动驱动,工作时顶部超弹性材料制成的空腔结构在充气后膨胀,而底部的限制层约束底部膨胀,导致整个执行装置产生弯曲的效果。ZHAO等[9]研究了一种气动软体手部康复装置,该装置由弹性材料制成,每个手指上都有一系列相互连接的气室,在每个手指的掌侧都有一个相对不能伸展的尼龙布,在流体加压驱动时,执行器引起抓握运动,实现康复治疗。IN等[10]设计了一种带有柔软的肌腱传送系统的可穿戴的手部装置,护套装有执行机构导线,帮助将导线张力传递到手套,当屈肌腱被拉动时,背带推动指骨的背部和顶端,实现手部的康复训练。YAP等[11]设计了一种可穿戴式手部软体康复机器人手套MR-Glove,该手套由软体气动执行器与手套组成,软体气动执行器由硅胶弹性体制成,气泵将压力气体通过管路通入气动软体执行器,软体执行器产生弯曲运动带动手指进行康复训练。赵芳[1]设计了一套软体外骨骼式机器人系统,软体执行器内部结构为中空,采用尼龙作为限制层填充物内嵌在硅胶内。管瑞阳等[12]设计了一种穿戴式康复机器人手指的软体致动器,该软体致动器由具集成通道的弹性材料制成,内部为密集分布的三角形非充气腔室和菱形充气腔室软体结构。虽然软体手部康复装置具有柔性好、贴合性好、自由度高等诸多优点,但也具有驱动力小、复杂软体装置不易制作等缺点。
本文综合刚性装置与软体装置的优点,采用软体关节与刚性指节结合的形式,设计了一种刚软结合的可穿戴手部康复装置。该康复装置不仅具有比纯柔性装置更强的传力性能和手指的贴合性,而且具有比刚性装置更好的柔性和较高的安全性,且结构简单、成本低。
1 刚软结合手部康复装置设计
1.1 人手生物结构分析
为了实现对手功能丧失患者手部的康复功能,需要研究手部的尺寸参数和关节运动参数,以确定康复装置各关节、指节的尺寸。手部运动的实现是由肌肉屈伸带动手指骨头运动,改变指骨与指骨之间的相对位置来实现的[13]。对于人手来说,一般可以完成屈伸运动和开闭运动。屈伸运动就是人在握拳与展开的过程中,手指关节所完成的弯曲与展开运动。开闭运动就是手指与手掌在同一水平面上,掌指关节所完成的摆动运动。本文主要针对手指屈伸时各关节的活动范围开展可穿戴康复装置的设计。
所设计的手部康复装置结构要结合人手关节、指节等参数。通过查阅正常成人手指参数模型库[14-15],获得手部各指头关节的自由度、运动方式及活动范围,如表1所示。除此之外,还须考虑手指各指节长度参数。成人手部各手指指骨尺寸范围[16]如表2所示。
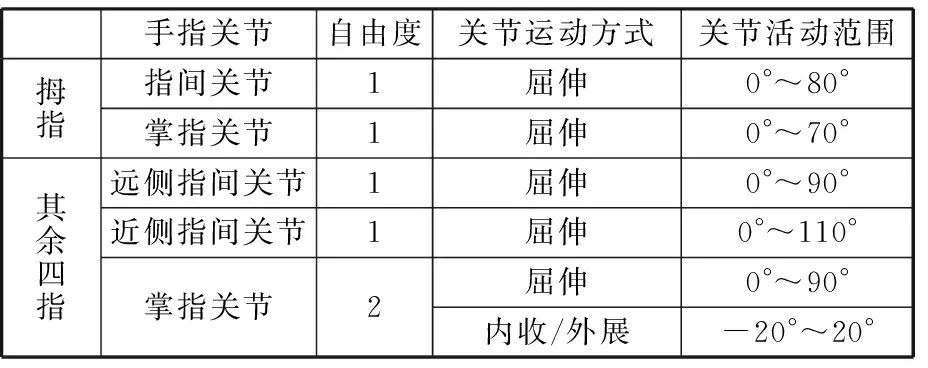
表1 正常成人手指关节活动范围[14-15]Tab.1 Joint ranges of normal adult fingers[14-15]
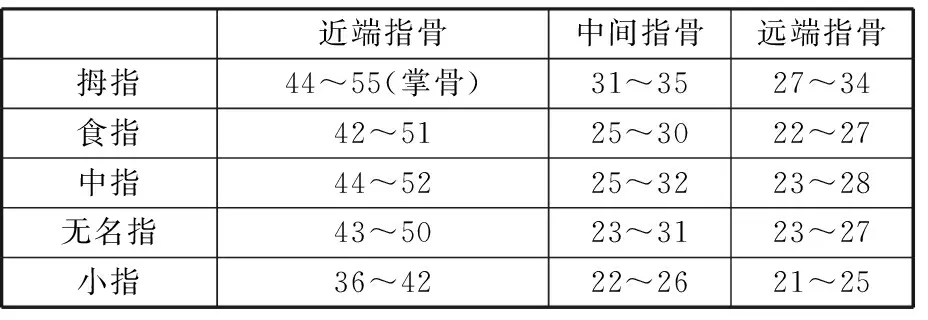
表2 成人各手指指骨尺寸范围[16]Tab.2 Phalange size ranges of adult fingers[16] mm
1.2 软体关节与刚性指节结构设计
气动软体手指执行器是软体康复装置的主要部件,其结构设计的优劣直接影响装置的性能。通过对人手的生物结构进行分析,设计软体手指执行器各指节、关节的尺寸,如表3所示。
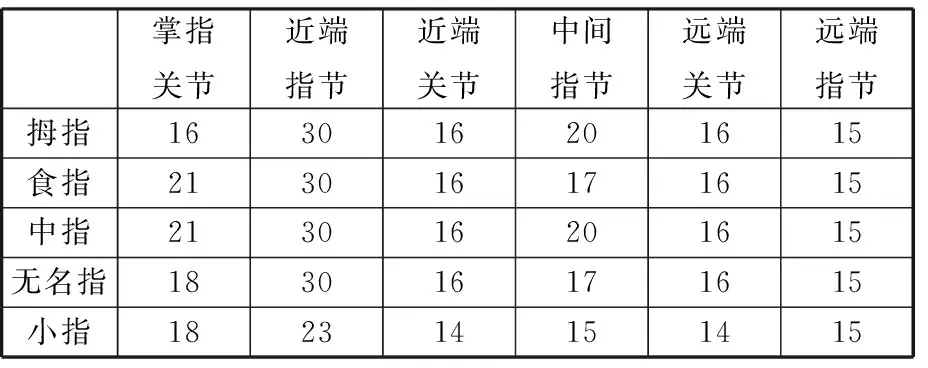
表3 软体执行器各指节和关节长度
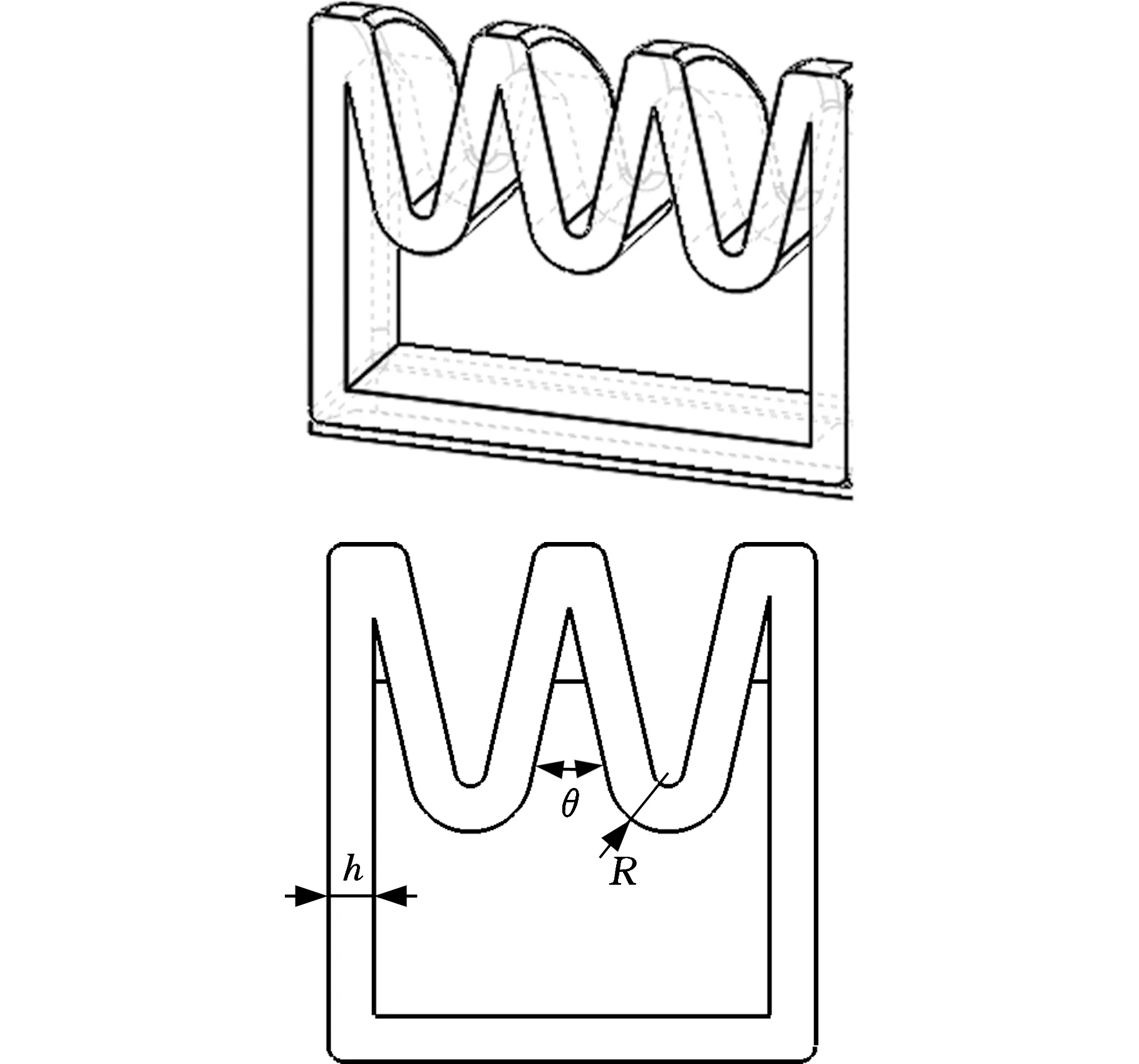
图1 软体关节结构模型Fig.1 Soft joint structure model
根据表3参数,设计了气动软体手指执行器软体关节结构模型,如图1所示。为了解决PneuNets结构局部应力过大的缺点,将气动软体关节由多个分割式气室改为整体气室,将原本的矩形结构优化为波浪形结构,以增加变形量、减小应力;将原始的矩形断面优化为圆弧形状,以减小应力、增加装置的安全性能。通过改变关节外层壁厚h和单个波浪形气室结构的角度θ进行有限元仿真实验,确定弯曲性能最佳的结构参数,实验设计和结果如表4所示。通过实验可得,外层厚度h越大,弯曲角度越小,但h=1 mm时径向膨胀过大,所以本文选择h=1.5 mm。θ对弯曲性能的影响不大,根据结构特性选择θ=25°,并设置波浪结构圆弧半径R=2 mm,便于结构设计,且手指整体弯曲角度可以满足手部康复要求。
为了满足管路与软体关节连接的气密性要求,采用“硬+软+硬”的方案结构。为了减小装置的质量,同时将气路布置在其中间以减小装置所占空间,刚性指节由上下两个壳体组成并采用中空结构设计,如图2所示。为了减少零件的数量,使结构简单轻便,刚性指节的上下壳体的连接采用卡扣结构,软体关节与刚性指节接口的设计结构如图3所示。
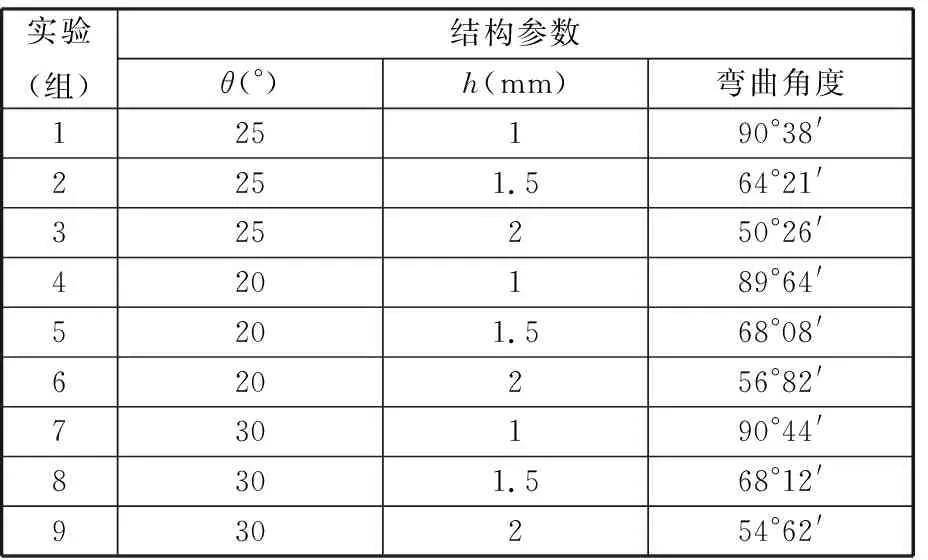
表4 结构优化实验设计和结果Tab.4 Structural optimization experiment designand results
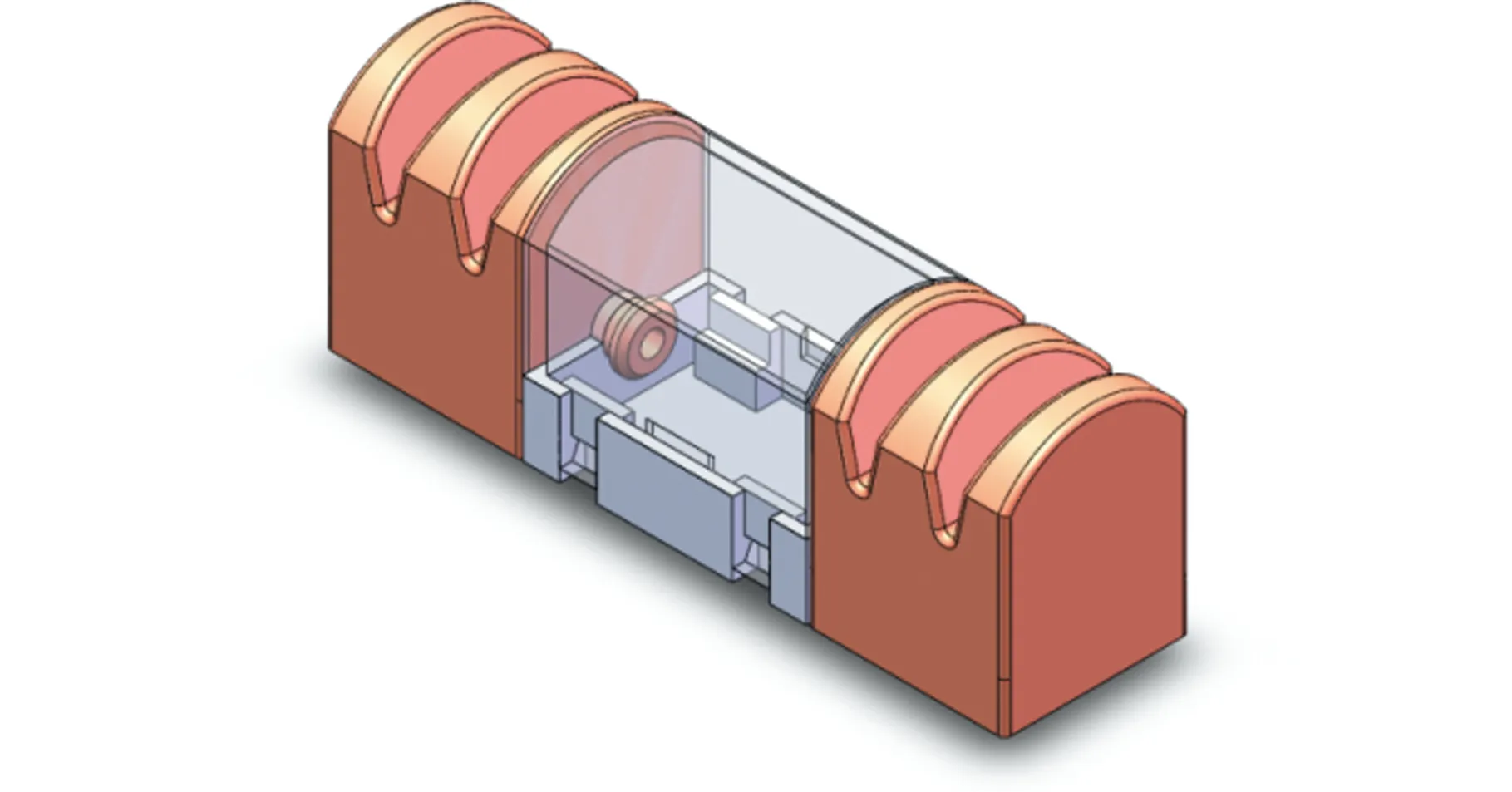
图2 刚性指节中空结构Fig.2 Hollow structure of rigid knuckle
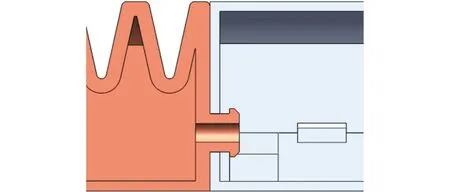
图3 软体关节与刚性指节接口Fig.3 Connector for soft joint and rigid knuckle
装配时,先将管路接口插入软体关节的接口内;然后将软体关节结构放入刚性指节的壳体孔内,合上壳体;最后通过壳体上的卡扣进行固定。由于软体关节接口的厚度大于管路接口与刚性指节壳体孔的半径差,所以连接的过程中软体关节接口会发生变形,从而保证了气密性的要求。
1.3 软体关节驱动分析
该执行器的软体关节由硅胶材料铸造而成。硅橡胶是典型的高分子非线性超弹性材料,目前多通过建立其应变能密度函数W模型来分析材料的力学性能[17-18]。各向同性超弹材料的应变能密度W可表示为张量C的3个不变量(aC,bC,cC)的函数:
WP=W(aC,bC,cC)
(1)
(2)
其中,λ1、λ2、λ3分别为x、y、z方向的主伸长比[16]。本文采用的硅橡胶材料形变量相对较大,因此选用Yeoh模型[17,19-20]并将其简化,保留前两项,得到应变能密度函数:
W=C10(aC-3)+C20(aC-3)2
(3)
其中,C10、C20为材料常数。所设计的软体关节执行器可视作多个相同的气囊单元串联结构。假设每个气囊的形变相同,且硅橡胶材料不可压缩,每个气囊的受力变形形式如图4所示。
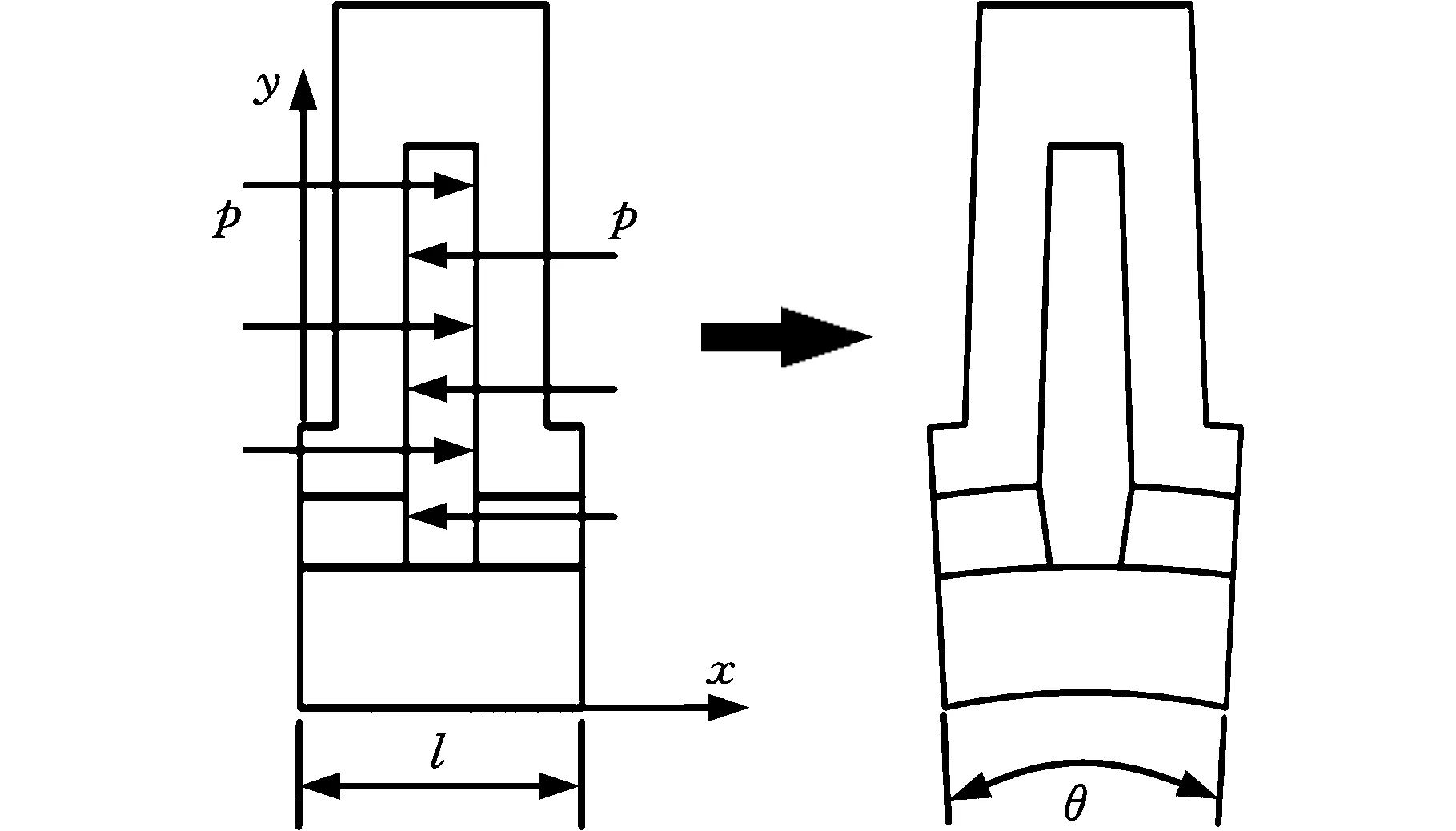
图4 气囊变形形式Fig.4 Airbag deformation
应变能密度函数W对气囊的弯曲角度θ(rad)求导可得
(4)
假设驱动气体做的功全部转化为驱动器形变的势能,根据虚功原理,有
pdVK+VSdW=0
(5)
其中,p为驱动气压;VS为硅橡胶体积,mm3;VK为气囊腔体体积,mm3。整理式(5)可得
(6)
其中,Vx、Vy为x、y方向两侧外壁硅橡胶的体积;Wx、Wy为应变能密度函数在x、y方向的分量。式(6)只含p与θ两个未知数,因此在已知驱动气压p的情况下即可确认单个气囊的弯曲角度θ,乘以驱动器气囊的个数并考虑刚性指节即可获得驱动器整体的弯曲角度。
1.4 刚软结合手指执行器设计
可穿戴手指康复装置由5根与手指接触的刚软结合手指执行器组成,气动手指执行器通过粘接与手套连接。每根气动手指由3个软体关节、3个刚性指节和软体底板组成,通入压力气体时产生弯曲运动。气动手指执行器上的3个气动软体关节通过气路连接,采用欠驱动原理,当气路中通入压力气体时,3个关节同时产生弯曲运动,进而带动整个手指产生弯曲运动,实现对手部抓、握、捏等功能的康复运动。刚柔结合手指执行器组成的可穿戴手指康复装置结构如图5所示。
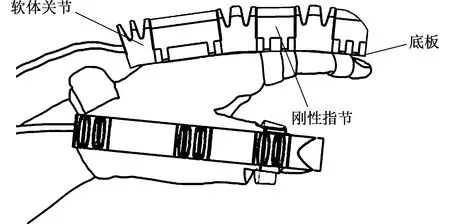
图5 刚软结合手指执行器Fig.5 Rigid and soft combined finger actuator
2 刚软结合手指执行器有限元分析
基于所设计的刚软结合手指执行器结构进行有限元应力与变形分析。首先为各部分创建材料,并进行组装与合并,设置重力及腔室内壁压力载荷;然后增加结合交互以防止当一个软体关节足够膨胀时相邻的气室壁会相互接触;最后对模型进行网格划分。设置的关节材料参数为:密度1130 kg/m3,应变势能Yeoh,输入源系数C10=0.11,C20=0.02,通过硅橡胶试样的拉伸试验获得。指节材料参数为:密度750 kg/m3,应变势能Yeoh,弹性模量6500 MPa,泊松比0.2。有限元仿真模型如图6所示,其中施加重力加速度9.810 m/s2,气体压力0.1 MPa。图7和图8为采用原始PneuNet关节结构和本文所设计关节结构的有限元应力云图。
图6 执行器有限元模型Fig.6 Finite element model of the actuator
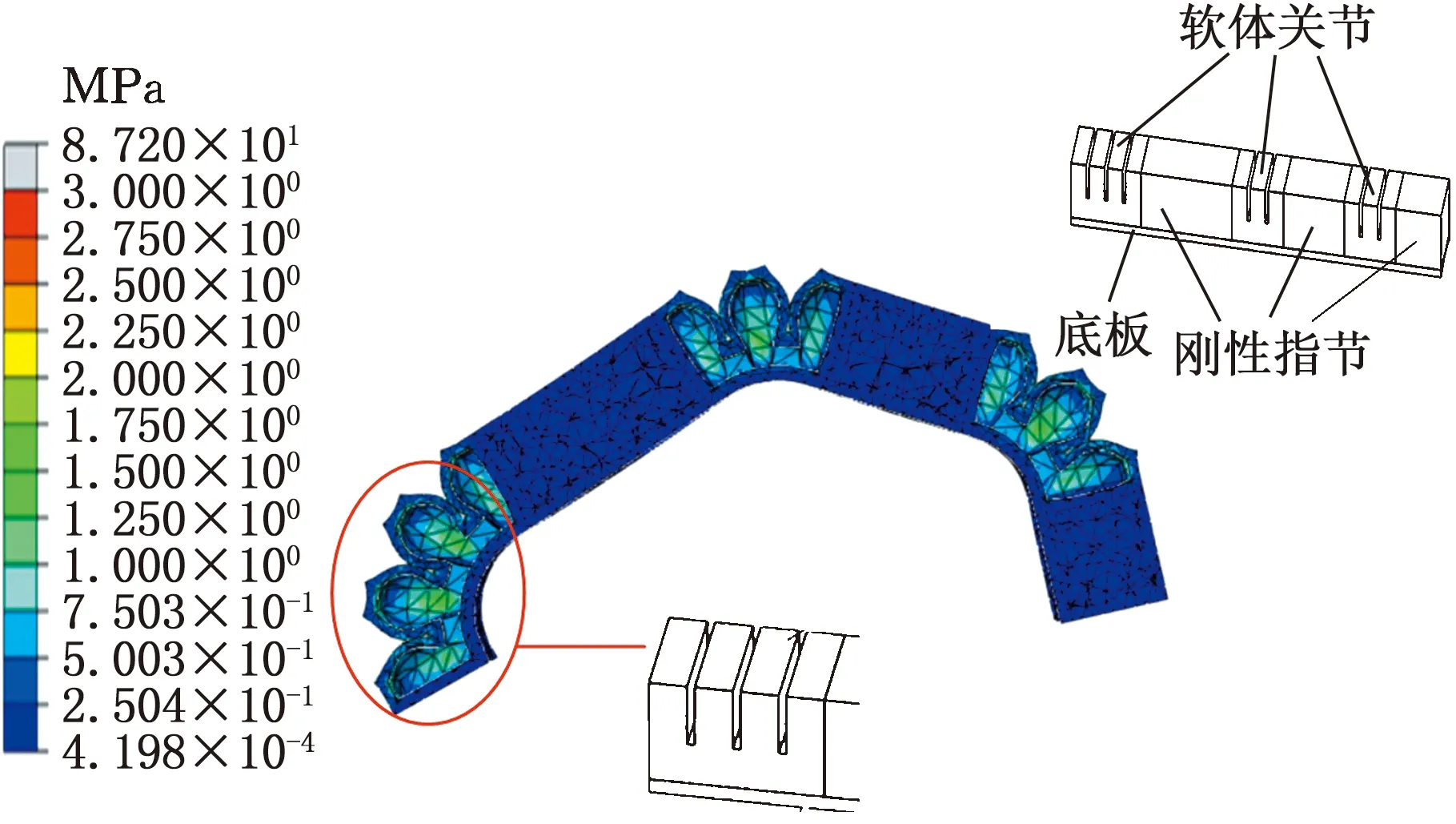
图7 PneuNet结构应力云图Fig.7 Stress nephogram of PneuNet structure
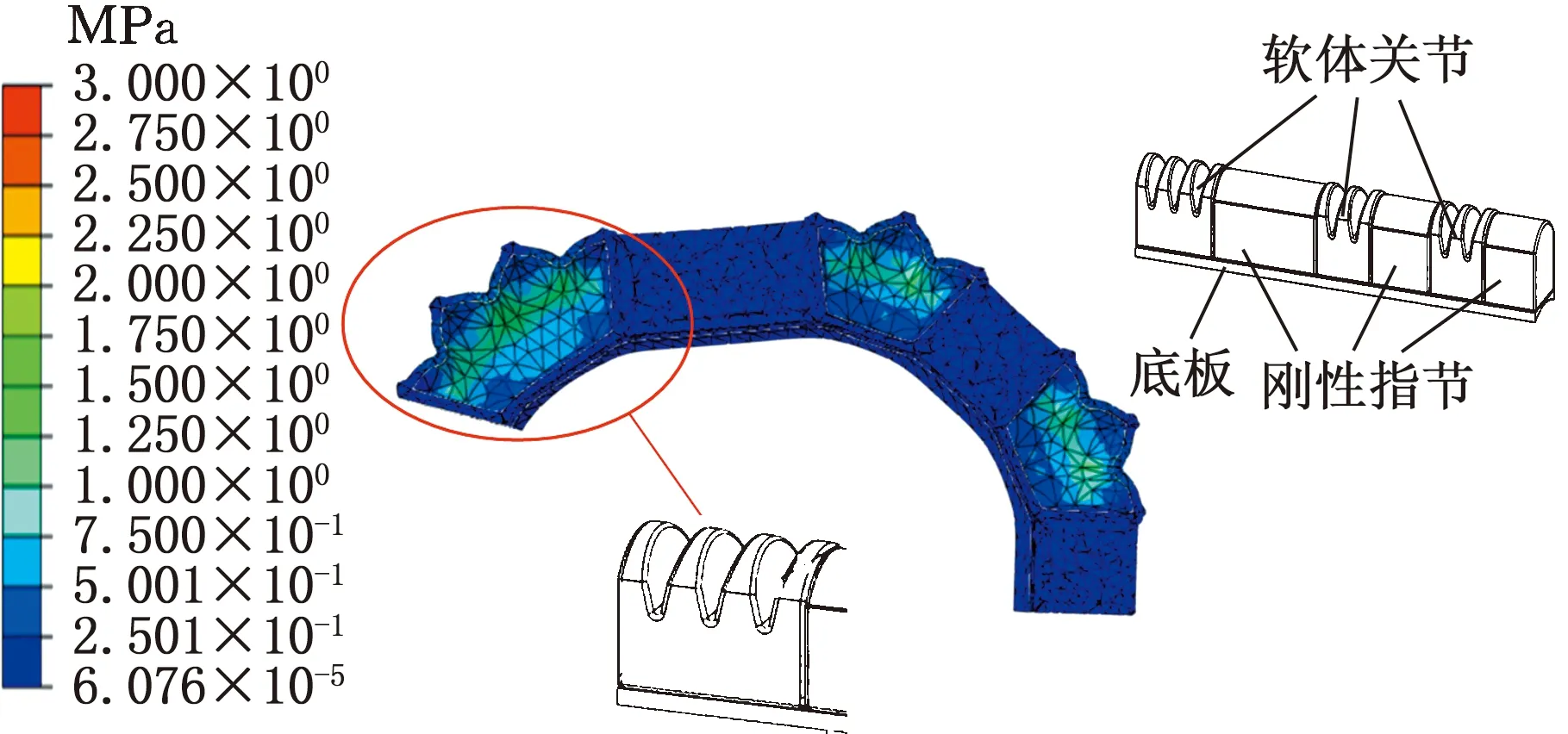
图8 刚软结合手指结构应力云图Fig.8 Stress nephogram of rigid and softcombined finger structure
由图7和图8可知,本文改进的软体关节结构模型的应力集中现象得到了改善,最大应力由8.72 MPa降低到2.81 MPa,降低了67.8%。实验结果证明改进后的软体关节结构合理,可有效减小应力集中。对单根气动手指软体关节分别施加0 MPa、0.02 MPa、0.04 MPa、0.06 MPa、0.08 MPa、0.10 MPa压力,获得手指执行器在对应压力下的弯曲角度如图9所示。
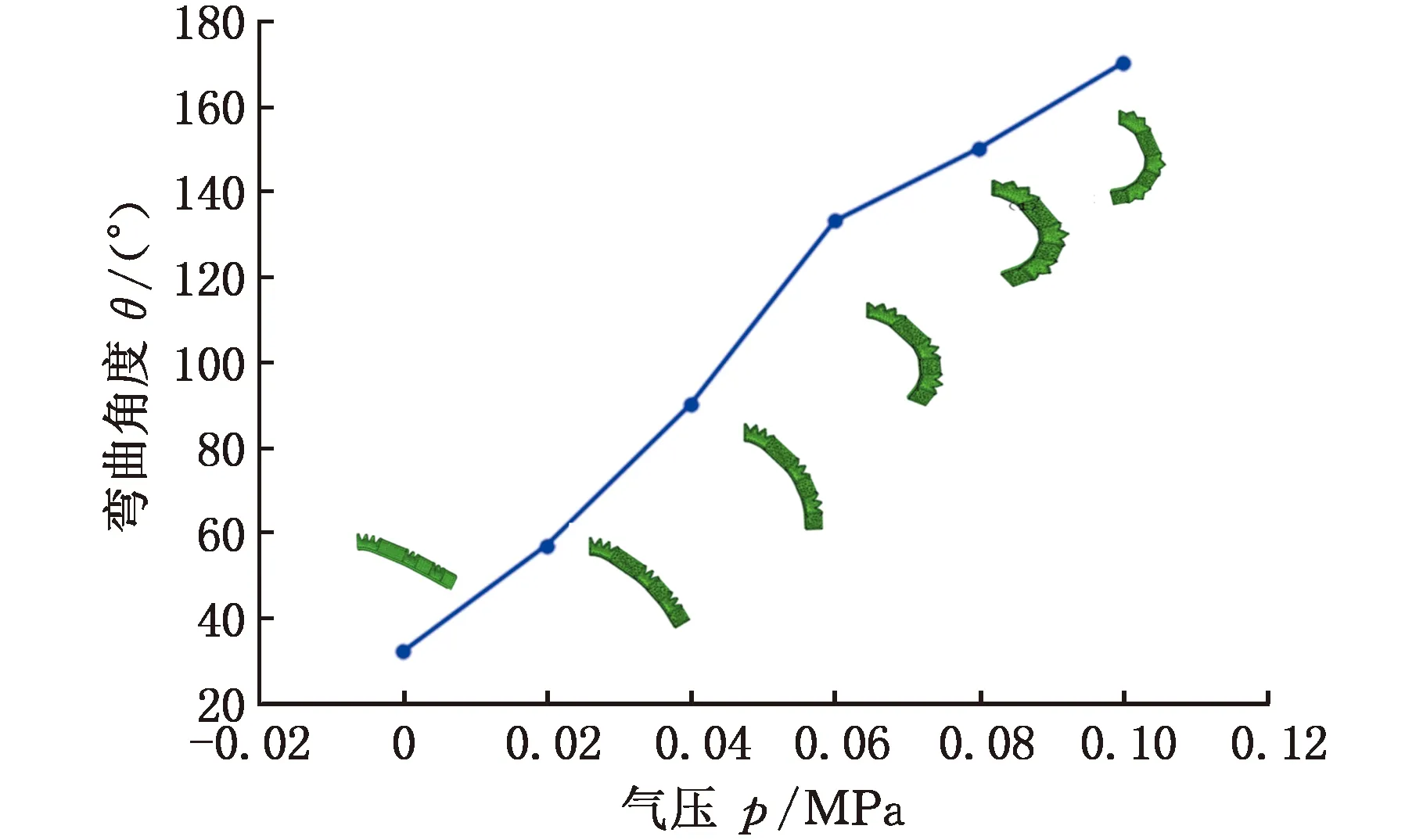
图9 刚软结合手指p-θ对应图Fig.9 The p-θ correspondence diagram of rigid andsoft combined finger
3 刚软结合手部康复装置制作
该刚软结合手部康复装置的每根手指执行器由软体关节、刚性指节、管路、接头和底板组成。刚性指节材料为光敏树脂,采用3D打印方法制作。软体关节与底板为硅胶材料,采用铸造方法获得。气动软体关节是由硅胶材料制成的中空结构,注入压力气体,通过硅胶的变形以实现关节弯曲。制作过程需要保证气动软体关节的气密性。整个关节分成上下两个部分分别制造,采用模型反求的原理得到模具,模具需要增加冒口以提升质量。
设计的模具如图10所示。每个气动软体关节模具由上腔顶模、上腔底模、下腔顶模和下腔底模四部分构成。制作时上腔顶模与上腔底模合模制成气动软体关节腔室上腔,下腔顶模与下腔底模合模制成气动软体关节腔室下腔。上下腔室制作完成后,取下上腔底模和下腔底模,在上下腔结合处刷上硅胶混合液,然后将上腔顶模与下腔顶模进行合铸,最后得到气动软体关节的整体腔室。图11所示为该气动软件关节的制作过程。
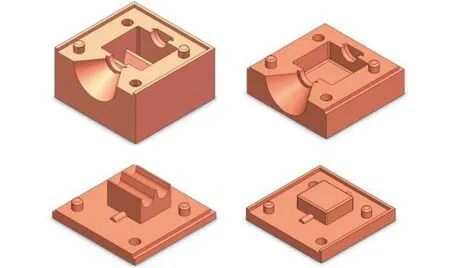
图10 单个气动软体关节模具Fig.10 Single pneumatic soft joint mould
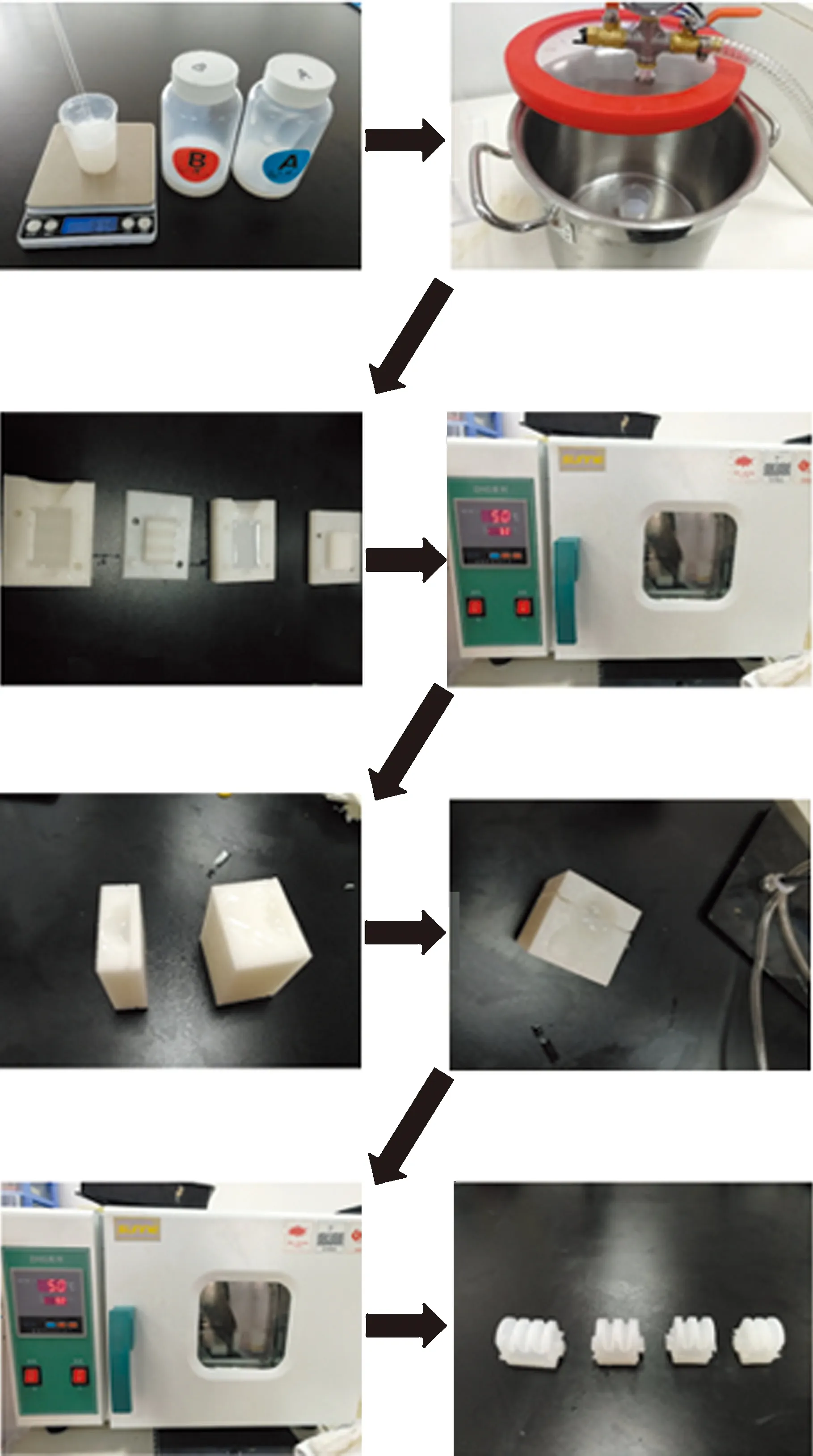
(a)按比例配置硅胶混合液 (b)除去混合液中的气泡 (c)倒入模具 (d)合上模具 (e)硅胶烤制(f)上下腔室合拢 (g)再次烤制 (h)修剪与测试图11 气动软体关节制作步骤Fig.11 Pneumatic soft joint manufacturing steps
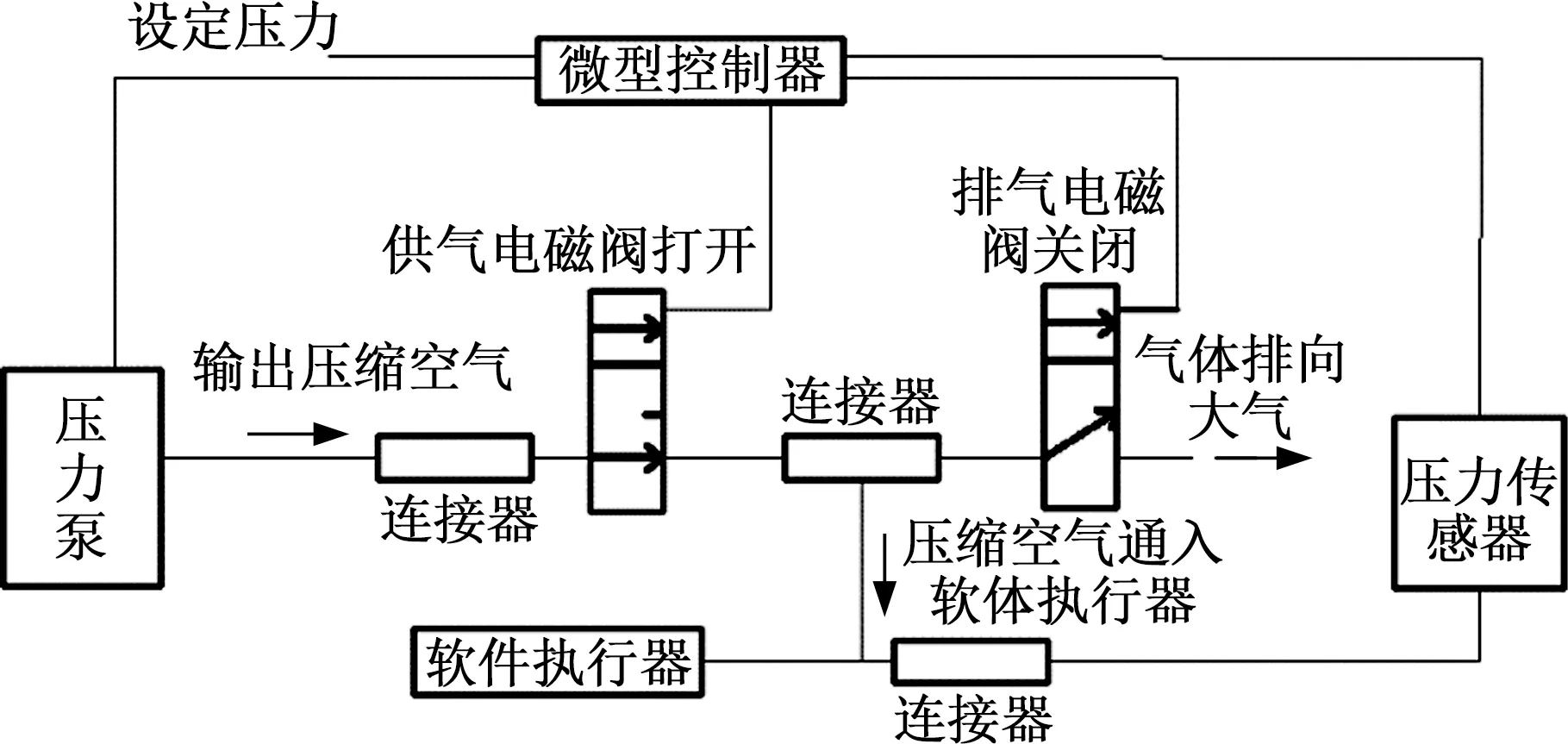
图12 实验控制系统原理图Fig.12 Schematic diagram of experimentalcontrol system
采用本文模具和制作流程制成的气动软体关节气密性好,质量较高,气室内没有气泡,气室壁均匀,变形良好。
4 气动手部软体康复装置实验
4.1 实验平台搭建
刚软结合手部软体康复装置实验平台由支架、相机及气动控制系统组成。相机用于获取执行器变形信息。气动控制系统由1个压力泵、1个微型控制器、2个电磁阀、1个压力传感器和3个连接器组成,系统原理如图12所示。工作时,向微型控制器输入预设压力值,微型控制器控制压力泵工作。此时供气电磁阀打开,排气电磁阀关闭,压力泵产生的压力气体通往软体执行器,使执行器产生弯曲。压力传感器通过连接器与执行器的气路联通,实时检测执行器处的压力值,并将压力值传到微型传感器处,与预设压力值进行比较。若检测压力值小于预设压力值,则电磁阀的闭合状态不变;若检测压力值大于预设压力值,则排气电磁阀打开,供气电磁阀关闭,以控制软体执行器内的压力保持动态平衡。利用该实验平台进行单根气动手指的弯曲特性和指尖力测量实验。
4.2 单根手指弯曲测试实验
将气动手指执行器的第一个关节一端垂直固定,使整个手指执行器与地面平行,弯曲面垂直于地面。在手指执行器等高处安装相机,拍摄其在通入压力气体后的变形情况。对单根气动手指软体关节分别施加0、0.02 MPa、0.04 MPa、0.06 MPa、0.08 MPa、0.10 MPa压力,在每个压力下,待被测气动手指变形稳定后,用相机拍摄气动手指的变形情况,如图13所示。仿真与实验的变形情况对比如图14所示,由实验结果可以看出,在不同压力的情况下,单根气动手指弯曲变形情况与有限元分析结果大致相同。

(a)p=0 (b)p=0.02 MPa(c)p=0.04 MPa

(d)p=0.06 MPa (e)p=0.08 MPa(f)p=0.10 MPa图13 单根气动手指弯曲变形Fig.13 Bending deformation of single pneumatic finger
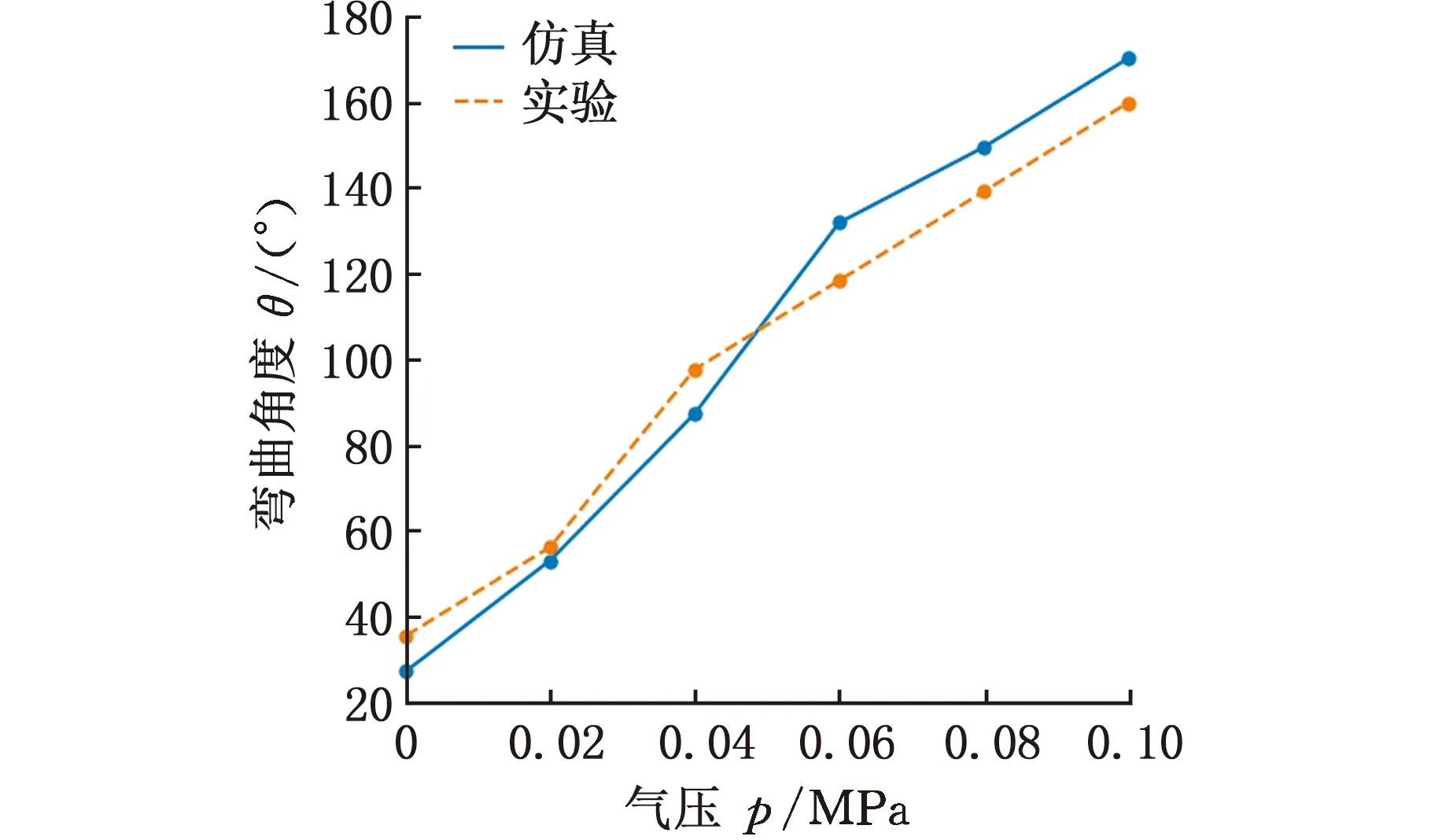
图14 仿真与实验的变形情况对比Fig.14 Deformation comparison of simulationand experiment
4.3 单根手指指尖力测试实验
为了研究气动手指的静力学特征,搭建了单根手指指尖力测量的实验平台,如图15所示。实验平台由电脑、控制器、气泵、连接器、压力传感器、支架、平台以及电子秤(精度为0.01 g)组成。
图15 手指指尖力测量实验平台Fig.15 Experimental platform for fingertipforce measurement
实验得到指尖力与通入气压的关系如图16所示。由实验结果可知,指尖力与通入气体压力成正比。
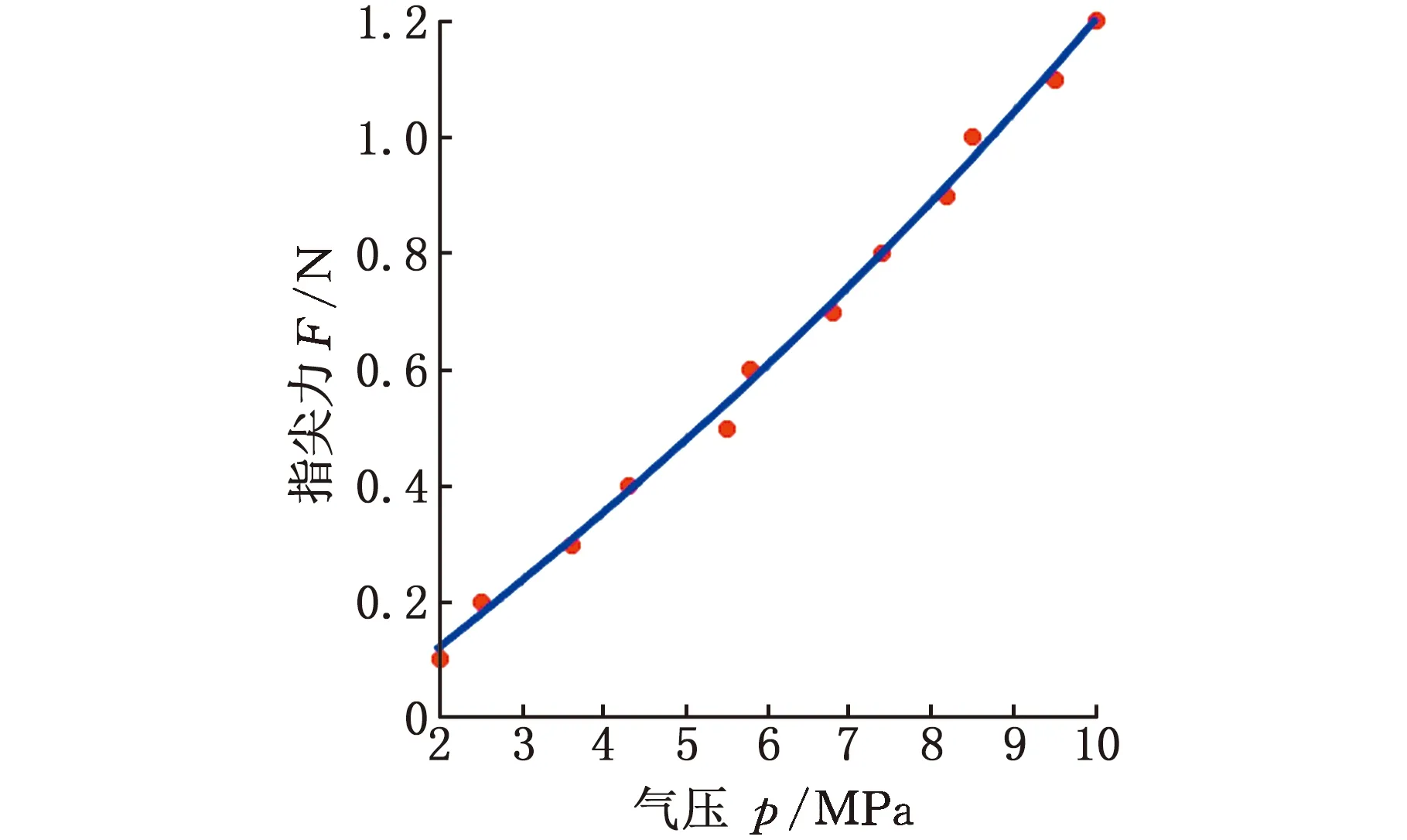
图16 指尖力与气体压力关系Fig.16 Relationship between fingertip force andgas pressure
4.4 手部康复装置抓取性能实验
手部软体康复装置用于手部抓握等运动功能的康复训练,故其带动手部完成简单的抓取任务是非常重要的。为观察该刚软结合可穿戴手部软体康复装置的抓取性能,实验中对纸盒、笔筒、木块等不同形状的物体从不同角度抓取,实验用品及相关参数如表5所示。实验设置分为无手掌抓取和有手掌抓取,其中有手掌表示在装置中集成了掌指关节的约束部分。无手掌手部康复装置和有手掌康复装置抓取实验如图17所示。食指弯曲角度和指节输出力如图18所示。

表5 实验用品及相关参数Tab.5 Experimental supplies and related parameters
实验结果显示,所设计的刚软结合可穿戴手部康复装置能够驱动人手完成对笔筒、纸盒、木块的抓取,对不同形状物体表现出较好的适应性。手部康复装置集成手掌后,在同样压力作用下,整个康复装置气动手指执行器的弯曲变形提高了23%,抓取力提高了11.8%,能输出1.32 N外力,性能得到了提升。

(a)无手掌康复装置抓取实验

(b)有手掌康复装置抓取实验图17 手部康复装置抓取实验Fig.17 Grasping tests of hand rehabilitation device
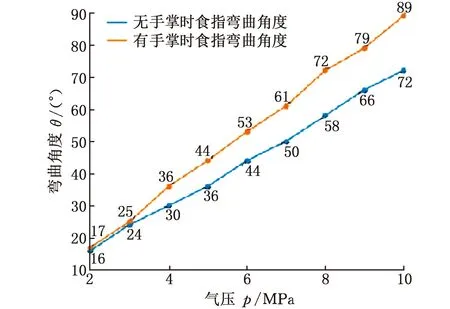
(a)食指弯曲角度
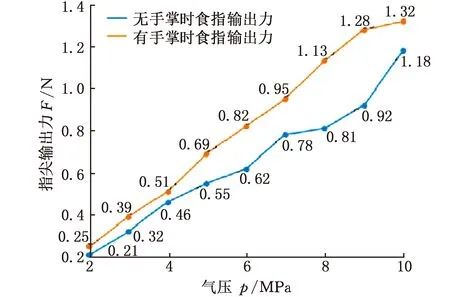
(b)食指输出力图18 手部康复装置抓取性能Fig.18 Grasping performance of handrehabilitation device
5 结论
(1)设计了一种新型气动刚软结合可穿戴手部康复装置执行器,在软体关节和刚软结合方式上均采用独特设计,相比纯柔性执行器具有更强的传力性能和手指贴合性,相比纯刚性装置具有更高的柔性和安全性。
(2)总结了一种制造此类形状复杂和小壁厚的硅胶产品的快速、高质量的铸造方法。
(3)搭建了用于测试气动手指执行器的实验平台,完成了单根手指弯曲变形和单根手指指尖力的测量实验。刚软结合可穿戴手部康复装置通过抓握不同物体的实验展现了良好的抓取性能,能输出1.32 N外力,可满足日常生活中的抓握康复训练需求。