机载LiDAR和摄影测量技术在山地地区地形图测量中的应用
2021-05-07温玉维李小雁卢召艳
郑 晶,温玉维,李小雁,卢召艳
(1.中国能源建设集团湖南省电力设计院有限公司,湖南 长沙 410007; 2.湖南财政经济学院 湖南省经济地理研究所,湖南 长沙 410205)
随着国民经济的不断增长,电网建设如火如荼[1-2]。变电站的选址对基础测绘资料的要求也越来越高,故选择一种既符合精度又满足工期的测量方式尤为关键。
近几年,激光雷达(LiDAR)测量技术走向成熟,并在公路、铁路、林业、电力等不同行业大规模频繁使用[3-6]。该技术有高精度、高自动化、高效率的“三高”优势[7-8],将逐渐成为大比例尺地形图测量的主流技术手段。
1 机载激光雷达测量技术原理
机载LiDAR通过发射激光照射到对象目标,利用安装在飞行器上的激光测距仪、GNSS系统、IMU系统获取被照射目标的坐标位置及高程信息[9-10]。并根据物体的特性进行点云分类,以获得真实的数字地面模型(DSM)。机载LiDAR测量技术原理图如图1所示。

图 1 机载LiDAR测量技术原理图
机载LiDAR测量过程包括两个阶段:外业的数据获取、内业的数据处理。基本流程如图2所示。

图2 机载LiDAR测量基本流程图
1.1 数据获取
通过采集目标体反射的激光束实现信号的采集。在山地林区,由于植被茂盛、树叶浓密,激光束会有多次反射,故LiDAR将采集多个数据点[11]。在航飞中需要选择合适的飞行参数和飞行方案。通过地面基站差分的方式提高了机载GNSS的精度,最终获得高精度的点云数据。
1.2 数据处理
使用点云分类软件中基于不规则的三角网滤波算法来分离地面点,然后通过设定相应的阈值产生不同的滤波结果,利用最大建筑尺寸、迭代角、迭代距离、最大地形坡度角来控制地面点的分类精度[12],从而分类出不同地物。数据处理流程如图3所示。
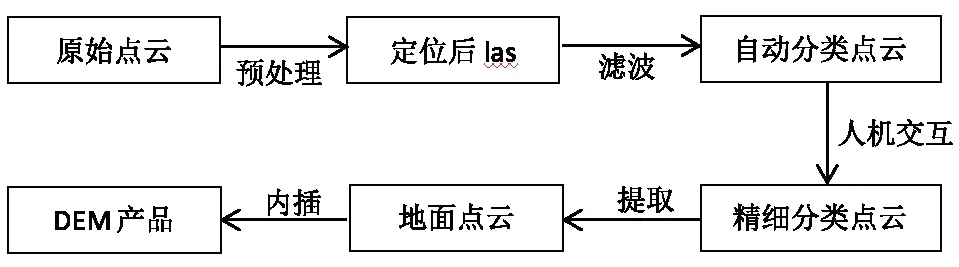
图3 数据处理详细流程图
2 LiDAR技术在湘西某变电站地形图测量工程的应用
2.1 工程概况
湘西某变电站是湘西地区电网的重要节点。该待建变电站地处武陵山区腹地,吉首市市区东侧5 km,海拔约300 m,高差约200 m。站址的西、南两侧均被万溶江环绕,东临G319国道,北接G56杭瑞高速。测区内无居民住户,仅存两间临时羊棚。山体起伏,植被茂盛,以灌木及杂树为主,区内无林牧小路,通行困难。测区共分为两部分,呈T字形分布,北侧为0.91 km2的变电站主场区,南侧为0.30 km2的进场道路。测区地理位置如图4所示。

图4 湘西某变电站站址示意图
因该工程工期紧张,需测制1:1 000地形图。传统RTK测量方式将无法满足工期要求且成本较高。植被茂盛地区采用普通的航测手段,在立体模型下人工采集高程点时,精度会受到来自植被的干扰和人为的经验误差影响。故本工程采用机载LiDAR测量技术对测区进行测量,并在该技术薄弱地区采用普通航测手段进行适当补充。
2.2 LiDAR数据的精度分析
利用机载LiDAR对测区进行飞行拍摄,对飞行轨迹数据、姿态数据、激光测距数据、激光头摆动角度数据进行联合解算,得到点云数据的空间坐标。每平方米激光点数目超过50个,满足点云密度要求。测区点云数据如图5所示。

图5 测区点云数据
然后通过对点云数据的分类提取和滤波处理,剔除掉植被上的坐标点,建立数字地面模型。
为检验生成DEM的精度,在测区内按地形和位置均匀采集高程点211个,DEM读取高程与实测高程的较差统计如表1所示。
由表1可知,约34.6%的检测点较差值超过0.4 m。为查找误差与某属性的相关性,将检测点按不同属性进行分类统计,因测区全部位于植被茂盛的山地,故分类中不讨论不同植被的影响。按照高程、坡度分类结果如表2所示。
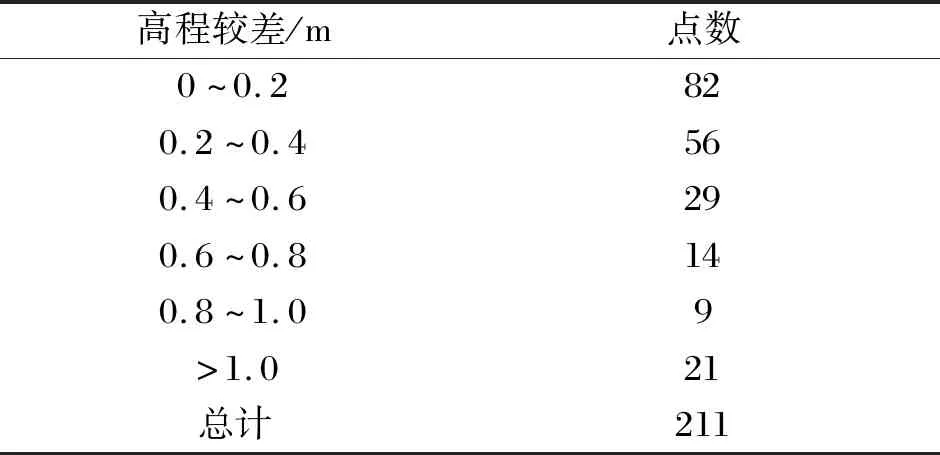
表1 高程较差统计表

表2 检测点分类统计表
以DEM与检测点高差值为横坐标,同一高程区间内某一高差区段的检测点数占某一高差区段的总检查点数的比例作为纵坐标绘制高程因素相关折线图,如图6所示。
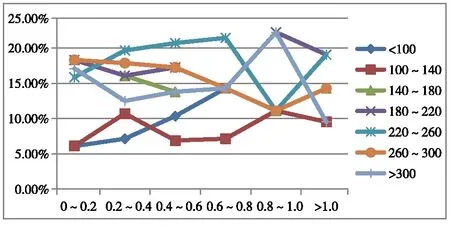
图6 高程因素相关图
由图6可知,不同精度的高程点在不同高程段基本处于均匀分布,并无强烈的相关关系。
以DEM与检测点高差值为横坐标,同一坡度区间内某一高差区段的检测点数占某一高差区段的总检查点数的比例作为纵坐标绘制坡度因素相关折线图,如图7所示。
由图7可知,在坡度由小增大的过程中,低精度高程点比例明显增加。据此推测可能由于激光垂直扫射在坡度较大的区域时,与地面夹角较小,造成在分类时难以明确分辨植被及地面坡坎,而带来较大误差。经过比较“20°~30°”以及“30°~40°”的折线图可以明显发现,当坡度值大于30°时,高程点精度大幅下滑,大部分精度低于0.6 m,随着坡度的进一步增大,高程精度基本都超过1 m,无法满足设计要求。故需要在坡度较大区域进行普通摄影测量作为补充。为得到需要进行普通航测立体采图区域(以下简称待修正区域)的边界文件,采用了空间分析等手段对机载激光雷达生产的DEM进行处理。
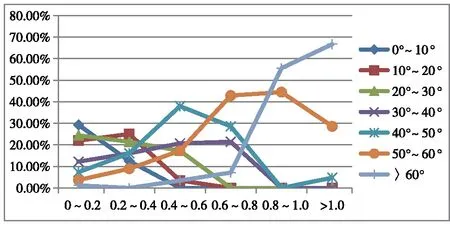
图7 坡度因素相关图
2.3 空间分析及航测DEM修正
为了分割出坡度大于30°的区域,采用GIS手段中的坡度分析工具对上文生产的DEM进行分析,以30°为边界对DEM进行重分类。将分离的图块转换成边界数据,共产生了3 184个图斑,剔除标记的大坡度矢量数据后共剩余2 455个有效图斑。考虑工作效率以及修正必要性,将面积小于400 m2的区域舍去。最终剩余88块面积较大区域,合计需修正面积约0.19 km2。
通过空间分析得到最终待修正区域范围图,技术流程如图8所示。
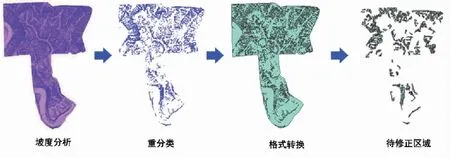
图8 空间分析技术流程图
对测区全域经过野外的航测和像控点测量,以及室内的空三加密,构建立体像对。并将图8流程生成的矢量边界文件导入进行叠加,对矢量边界区域内的零散地块进行高程点采集,从而构建出修补地块的DEM。并与用修正区域边界裁剪的激光雷达DEM相叠加。最后对两个DEM融合处做相应接边处理,以满足精度要求,如图9所示。
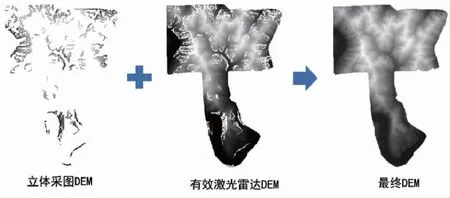
图9 最终DEM生成图
按照规范要求对DEM进行高程点抽检,针对坡度较大区域进行了重点检测。80%点位精度处于0.2~0.6 m之间,相对于激光雷达的原始DEM精度有所提升,满足设计需求。
3 结论与展望
本文通过结合机载激光雷达测量技术和常规摄影测量技术对测区进行了大比例尺地形图的测量,最终得到了满足需求的数据成果。在实际工程中发现,机载LiDAR技术在与激光束夹角较小的地形中测量精度有明显改变且难以控制,可以通过一些传统稳定的测量手段进行补充。
针对南方地区植被茂盛的特点,在传统测量技术效率较低的情况下,激光雷达技术以其特殊的数据获取方式将会得到更为广泛的应用。随着点云分类技术的不断发展以及激光头硬件的更新,该技术对灌木丛及夹角问题将会有更优的解决方案。
