基于CAN 总线的煤矿监控系统研究
2021-05-07尹建龙郭秀娟
尹建龙,郭秀娟
(吉林建筑大学电气与计算机学院,吉林 长春 130118)
0 引言
随着我国煤炭能源消耗的不断增加,煤矿安全事故时有发生,因此煤矿监控是安全生产的重要环节。我国传统的煤矿监控系统利用RS-485 总线进行数据传输,传输速度慢、距离短、定位精度低、集成度低、成本高[1-3]。在此背景下,本文中的煤矿监控系统以CAN 总线技术为基础,将井下各个节点组成网络,使上位机准确有效地对井下监控分站进行实时监控,利用CAN 总线的特性提高系统的可靠性,并且该系统以STM32 单片机为井下监测分站控制核心,结合多传感器监测井下环境参数及人员RFID定位,CAN 总线将井下数据传输给上位机,上位机采用组态王进行设计以实现人机交互。
1 系统总体方案
针对煤矿井下复杂的环境,本文提出基于CAN总线的煤矿监控系统,包括信息采集电路、井下监测分站、CAN 总线通信网络及上位机4 部分。煤矿监控系统设计方案如图1 所示。从图1 中可以看出:井下监测分站外接RFID 收发器和多个传感器用于采集井下实际环境参数和人员位置信息,并传给监测分站进行分析处理,若监测到实际环境参数超过预设值,则进行声光报警,监测分站与上位机通过CAN 总线实现数据通讯,并在上位机进行数据显示、储存,若监测到井下区域环境参数超限,则将报警信号通过监测分站传给井下工作人员,及时限制工作人员进入危险区域,实现报警装置与人员定位联动。
2 系统硬件设计
在本文的煤矿监控系统中,硬件选型主要包括单片机模块、CAN 总线模块、RFID 接收模块、传感器模块等。井下监测分站主要以STM32 单片机为控制核心,系统具有数据采集、超限报警、人员跟踪定位、联动控制等功能,其系统硬件结构如图2 所示。
2.1 CAN 总线模块
CAN 总线控制器选用SJA1000 独立控制器来实现数据发送和接收的任务,该控制器支持CAN2.0B 协议,采用低电平复位,可以支持11 位和29 位识别码。收发器选用82C250,该收发器具有对CAN 总线差动发送和差动接收的功能,通信速率可达1 Mbit/s。为了增强抗干扰能力,本系统在CAN总线控制器SJA1000 和收发器82C250 之间增加了1 个高速光耦器86N137,实现CAN 总线节点之间的电气隔离[4]。电路连接如图3 所示。CAN 总线多采用主控制模式,按照优先级处理各单元发送的信息,纠错方式为CRC 校验,通讯介质采用双绞线,传输距离最远可达10 km,较传统的RS-485 总线,传输距离远,抗干扰性强,适宜井下信号传输。
2.2 RFID 模块
RFID 模块选用nRF24L01 单片射频收发器,该收发器内部集成了功率放大器、晶体振荡器等多个模块,具有125 个可选频道和多种低功率工作模式,实现多点通讯和调频,与STM32 单片机通过SPI口连接来完成数据通信功能。较蓝牙、WIFI 数据传输距离更远。其电路原理如图4 所示。
2.3 传感器模块
传感器模块包括温湿度传感器和烟雾、温湿度、CO,CH4气敏传感器。温湿度传感器DHT11 是一种以数字信号为输出,集温湿度于一体的复合型传感器,该传感器采用单总线数据格式与单片机进行通信,仅需要1 个I/0 端口,采用校验和的方式进行校验,精度高,响应速度。为提高其稳定性,本系统在数据端(DATA)与电源(VDD)之间加上拉电阻。其连接如图5 所示。
气敏传感器选用 MQ-7,MQ-4,MQ-2 分别对CO,CH4、烟雾浓度进行数据采集。MQ 系列传感器多采用半导体为敏感材料,响应恢复快,可靠稳定,高度集成。MQ-2 型传感器检测范围广,对烟雾、烷及天然气具有极高的灵敏性,该传感器在使用前要进行预热。MQ-2 烟雾传感器的第4 引脚经过比较器、与非门和单片机相连,输出随浓度变化的直流信号,若检测到烟雾,则输出低电平,浓度越大,其电导率越高,电阻越小,输出电压也会相应增大。MQ-2 工作原理如图6 所示。
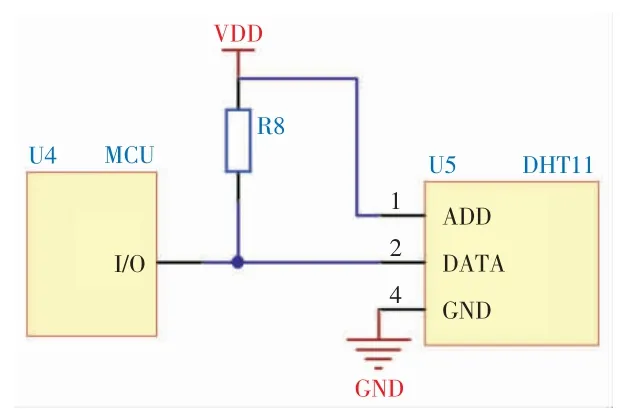
图5 DHT11 连接图

图6 MQ-2 工作原理
2.4 单片机模块
本系统选用STM32 单片机作为井下监测分站的控制核心,在传感器采集模块和CAN 总线模块之间承担着中转站的角色,STM32 单片机是基于ARM公司cortex-M 的32 位的微控制器, 较传统的51 系列、AVR 系列的微控制器,STM32 单片机具有更多的寄存器和外设功能,高性能、低功耗,时钟频率可达72 MHz,支持以太网、USB 和CAN2.0B 等多种外设接口同时工作。
3 RFID 定位及算法
RFID 系统主要由 3 部分组成:RFID 标签、RFID 读写器和通信网络。单片机外接RFID 读写器,通过已知位置的读写器对储存着编码信息的被测标签进行定位。定位方法选择基于测距的RSSI定位,并结合优化后的LANDMARC 算法对井下人员进行定位跟踪。RSSI 定位是利用RFID 标签发出无线电信号随距离的增大而有规律的衰减来计算RFID 标签与读写器的距离,以此实现井下人员的定位。
LANDMARC 算法的基本原理是实时读取待定位标签和参考标签的RSSI 值,并通过欧几里得公式计算待定位标签和参考标签的距离,根据RSSI的相似程度比较Emn,选择最小的前k 个参考标签,并计算这k 个参考点的权重,从而对待定位标签的坐标进行加权估算[5-6]。欧几里得公式为:

式(1)中,系统设有 R 个 RFID 读写器,N 个待定位标签,M 个参考标签,Emn表示第n 个待定位标签与第m 个参考标签的欧氏距离,m;Smr为第m 个参考标签在读写器r 处的RSSI 值,Snr为第n 个待定标签在读写器r 处的RSSI 值。
由于煤矿井下环境复杂,干扰因素多,传统的LANDMARC 算法定位准确度欠佳,因此本系统加入自适应k 值算法来优化LANDMARC 算法,依据多个参考标签的权重,分别计算不同k 值下参考标签和待定位的坐标并且计算误差ek,当ek 最小时,取kbest个参考标签计算待定位标签的坐标,以此来减小井下工作人员的定位误差。在不同k 值情况下进行算法仿真,误差值如图7 所示。k 值优化前后,仿真结果如图8 所示。
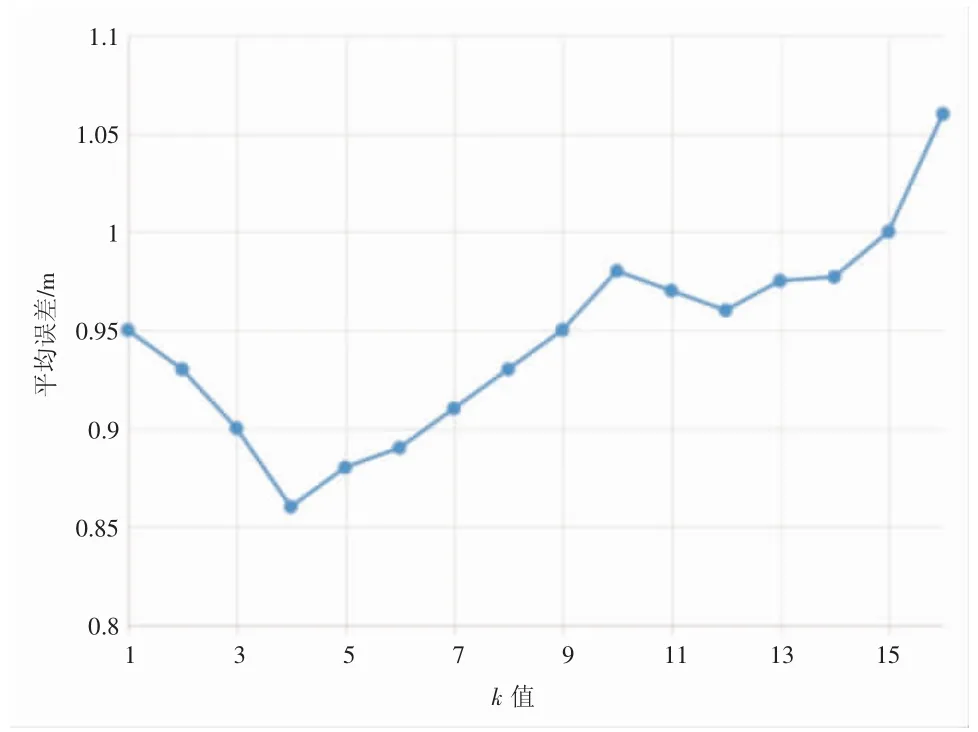
图7 不同k 值下待定位标签误差值
由图8 可知,当选择合适的k 值时,LANDMARC 算法优化前后,定位误差有较大差别。优化前,60%的待定位标签的定位误差在0.8 m 以内,而优化后其定位误差在0.54 m 以内。定位误差在0.8 m 内的待定位标签,优化前为60%,而优化后为80%,经上述分析,LANDMARC 算法在优化后,定位精度得到提高。
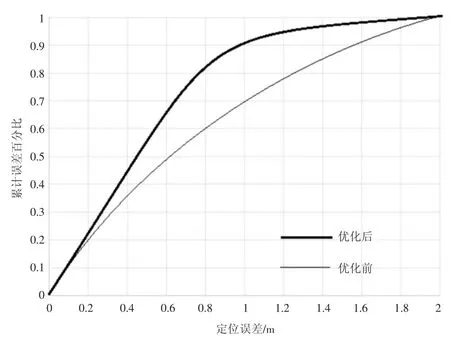
图8 k 值优化前后误差分析
4 系统软件设计
4.1 下位机软件设计
根据煤矿井下监控系统的功能要求,下位机程序设计选取Keil uvision5 进行软件编程,主程序工作步骤如下:
1)对整个系统进行初始化设置。
2)设置报警上下限,录入人员信息。
3)进行数据采集,井下数据采集包括两部分:一部分是采集井下CO,CH4、烟雾、温湿度等环境参数,另一部分是通过井下人员所携带被测标签发出应答信号的功率损耗来采集井下人员位置信息。
4)将采集的实际数据与设定的报警参数相比较,若超限则进行声光报警。
5)数据储存,并将数据经CAN 总线转RS-485模块传输给CAN 总线。
4.2 上位机软件设计
井上检测中心选用工业监控软件组态王进行上位机设计,其主要有对数据显示储存、分析处理、图形界面设置等功能。组态王通过CAN 总线与单片机进行交互, 井下所有采集的数据可以实时上传到上位机的历史库表。在组态王历史库中,可以查询井下人员位置信息、温湿度、CH4 浓度等历史数据。此外,上位机对接收的数据进行分析处理,并判断是否通过下位机向井下工作人员发出报警信号。以东北某煤矿为例,上位机超限报警设置界面、煤矿综合监控系统模型分别见图9~图10。
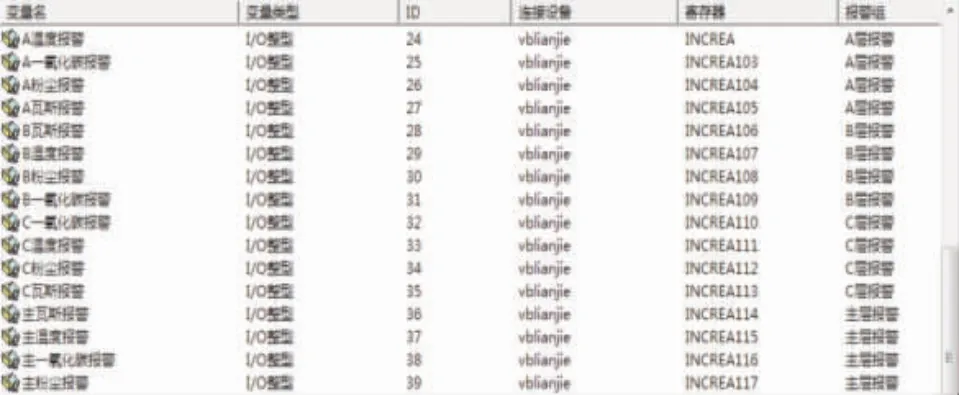
图9 上位机超限报警设置图
图10 煤矿综合监控系统模型
5 结论
本文将CAN 总线技术应用于煤矿监控系统中,对煤矿监控系统的硬件、软件进行设计,详细阐述了系统的总体设计、RFID 人员定位算法、CAN 总线模块选型、下位机软件设计。本系统可实时监控煤矿环境及井下人员位置,并根据井下环境及时对工作人员发出报警信号,提高了定位的准确度,降低了煤矿事故发生的可能性。同时本系统采用CAN 总线通讯方式,增强了系统的抗干扰能力,数据传输既快又准,稳定性好,为其他煤矿监控系统的研究提供借鉴和参考。
