动态跟踪条件下船载ACU双机平稳切换功能的实现
2021-05-07夏佳峰
张 皓,陶 敏,夏佳峰
(中国卫星海上测控部,江苏 江阴 214431)
0 引言
测量船是我国航天工程和卫星测控网的重要环节,承担着对火箭及航天器的跟踪测量、定轨定姿、遥测监视等任务,船载测控天线就是完成任务的核心设备。
船载天线伺服系统用于控制天线运转,ACU作为该系统的主要组成部分,具有极其重要的地位,对设备的可靠性和工作的稳定性提出更高的要求[1]。为提高ACU的可靠性,对其进行冗余设计是目前最有效的方法之一,冗余配置的部件介入并承担故障部件的工作,由此减少系统的故障时间[2-3]。目前,某型号测量船船载ACU采用热备份设计,可以实现人工手动切换主备机的功能,但只有在天线静止状态下,才允许进行主备机的切换。天线处于动态跟踪状态时,若进行主备机切换,切换过程中ACU自动转为待机状态,速度指令停发,会导致天线产生较大阶跃,可能造成跟踪目标的丢失,弱化了热备份的功能。针对该情况,本文根据产生阶跃的原因,提出了一种实现动态跟踪条件下ACU双机平稳切换的方法,确保天线在跟踪过程中进行主备机切换也不会造成较大阶跃,从而导致跟踪目标的丢失。
文章分为以下几个部分:第一部分主要介绍跟踪环及ACU双机切换工作原理,分析实现动态条件下双机切换的基础和产生阶跃的原因;第二部分提出动态条件下平稳切换的实现方法,针对问题进行改进;第三部分对新旧方法进行试验验证,比对其试验效果,从而证明新方法的优越性和可行性;第四部分为得到的结论及还需要完善和解决的技术问题。
1 跟踪环及ACU双机切换工作原理
1.1 跟踪环工作原理
自跟踪方式是伺服系统的主要工作方式,即天线随目标精准运动的状态,主要分为主天线跟踪(简称主跟踪)、引导天线跟踪以及光学跟踪,文中只涉及主跟踪。主跟踪环工作时,目标运动产生误差,伺服系统接收来自雷达接收机或者基带的误差信号,经数字处理、放大、驱动天线朝减小误差的方向移动,以完成对目标的自动跟踪。目前,船载设备采用的数字PID位置调节器[4],跟踪环系统如图 1所示。

图1 跟踪环系统框图
由跟踪环工作原理可知,误差电压为整个环路的信号基础,其信号流程如图 2所示。

图2 误差电压信号流程图
图2中,工控机A为主机,工控机B为备机,主机与备机的环路设置完全一致。
由图 2可以看出,误差信号通过信号调理单元后,同时传给ACU的主机和备机,因此,当主机在线时,备机也能接收到相同的误差电压信号。由于主跟踪模式的核心机理就是目标运动产生误差,此误差控制天线运动,天线运动使此误差消除,从而达到跟踪的目的,所以,当误差信号相同,即主机和备机的环路输入相同,对于同时运转的两个相同环路来说,可以进行无缝切换,这是动态跟踪条件下双机切换的基础。
1.2 双机切换工作原理
上节中提到的主机与备机(分别定义为A机和B机)为互相备份,只有在线状态的不同,目前默认A机为主机。A/B机通过台面上“A机/B机”按键进行主备机切换,按下此键,切换信号通过操控按键单元和信号调理与切换单元将在线权从A机转到B机,以保证同一时间只有一套ACU处于在线状态,能向外发送数据和指令,但两套ACU同时运转并接收数据,且环路状态相同。两套ACU采用实时数据传输的方式来实现工作方式状态同步,通过网线将在线ACU的工作状态同步给备机,即当A机转换为主跟踪模式,B机的跟踪环路同时转为主跟踪环路,保证了主备机状态的一致性。由于ACU和驱动的串口是查询式的,因此只有在线主机能反映驱动的状态和数据[4]。主要设备组成如图3所示。
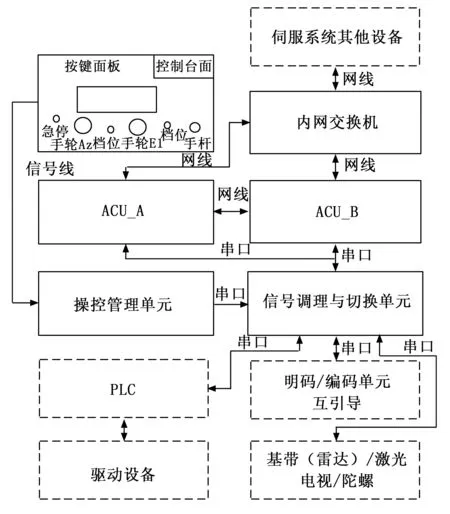
图3 主要设备组成图
图3中,PLC为驱动的逻辑处理模块,主跟踪环路所需要的误差电压由基带或者雷达终端通过串口发送给ACU。
信号流程如图4所示。
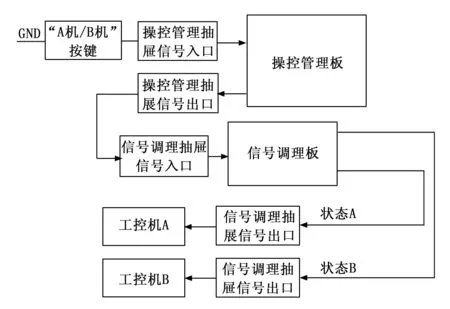
图4 双机切换信号流程图
图4中,A/B机切换信号选用Boolean型信号,即此键按下,则输出信号“1”,弹起则为“0”。当输入到操控按键板的信号为“1”时,ACU进行双机切换流程。天线控制软件采用Borland Delphi进行开发[5]。目前,程序中进行双机切换的代码如下:
procedure ABSwitchDeal;
begin
if(ABSwitchCommand<>
ABSwitchLastCommand)
then
begin
AcuSetStandbyMode;
end;
end;
由代码可知,若天线处于运动状态时,一旦进行双机切换,在线主机会自动转入待机模式,此时速度指令输出为0,直到切换完毕,新的在线主机开始向驱动发送速度指令,天线才能正常工作。这样造成的后果是,如果转换时间超过驱动维持速度指令的时间,驱动收到的速度指令就会变为0,若天线处于跟踪状态,就会造成较大的阶跃,致使天线无法正常跟踪。
2 动态条件下平稳切换实现方法
2.1 问题分析
目前,ACU发送速度指令的频率为40 Hz,与驱动的接收频率相同,因此驱动采用的速度指令接收策略是将接收到的速度指令保持一个发送周期(25 ms)不变,25 ms后,驱动接收ACU发送的下一帧速度指令进行指令替换。正常跟踪时,由于每一帧之间的间隔时间很短,对于天线来说,相邻两帧之间的速度指令电压变化很小,体现在天线的运动上基本不会发生太大变化,但当处理切换流程的时间超过了25 ms时,驱动执行的速度指令就会突变为0,天线的运动状态发生改变,无法正常运行,处理切换流程的时间越长,天线运动受到的影响越大。
2.2 记忆跟踪
由上节可知,ACU在切换时,由于天线由运动状态转为待机状态,导致切换时产生阶跃,因此,本文针对性提出了将待机改为记忆跟踪的方式,规避切换时产生的阶跃。
记忆跟踪是一种在应急情况下,为了保持对目标的跟踪,所采取的保持天线正常运转的有效机制[6],普遍运用于测控天线设备。当前,某型号测量船采用的记忆跟踪方式是当目标信号丢失时,ACU保持天线转记忆跟踪状态前最后一帧的速度,作为速度指令发送给驱动,使天线保持此速度继续运动,最长可持续5秒,5秒后,ACU自动转为手速状态。
根据记忆跟踪的工作原理,提出改进方法,并对ACU程序中的双机切换代码进行修改,即当进行双机切换时,在线主机进入记忆跟踪方式,直到新的在线主机开始工作,天线转为主跟踪模式,向驱动发送新的速度指令。双机切换代码可改写为:
procedure ABSwitchDeal;
begin
if(ABSwitchCommand
<>ABSwitchLastCommand)
then
begin
if MainTrkLock then
begin
if MemoryFlag then
begin
MemoryFlag := False;
MemoryTime := 0;
end;
AutoTrkManage;
end
else
begin
MemoryFlag := True;
if MemoryTime < 40 then
MemoryTime := MemoryTime + 1
else
AcuSetStandbyMode;
end
end
end
根据设备操作实际和记盘数据分析,切换过程时间不超过1秒,因此在代码中设定记忆时间持续1 s,即40个周期。这段时间内,天线保持转记忆跟踪状态前最后一帧的速度继续运动,直到ACU将新的速度指令发出,天线退出记忆跟踪。由于在跟踪动态目标时,天线是变加速或变减速运动,记忆跟踪方法在天线低速运动时,对目标的跟踪影响不大,但当天线为高仰角、高速度运动时,天线每一帧的速度变化都会增大,记忆跟踪相对目标实际运动轨迹的偏离度就会大幅增加,针对这种情况,还可以在记忆跟踪的基础上使用差分叠加法进行平滑处理。
2.3 差分叠加法
差分叠加法基于差分法[7],即在记忆跟踪的过程中,对天线速度指令进行平滑处理,防止天线出现较大阶跃的一种方式。当数字引导数据有效时,ACU根据数字引导角度数据进行实时数引速度的计算。ACU的数据采样频率为20 Hz,当采集到第N帧数引数据时,ACU对第N帧和第(N-1)帧数引数据作差,得到一阶差分处理结果,转化为电压值,叠加到记忆跟踪的第N帧速度指令中。由于记忆跟踪时速度指令保持不变,叠加处理后的速度指令近似真实指令,可以使天线的运动状态近似于主跟踪状态。
3 平稳切换方法的实验验证
利用该测量船上搭载的某测控天线进行试验验证,在ACU处操控天线,监控计算机进行数据状态记录。
3.1 双机切换存在“阶跃”
采用原代码,利用目标模拟器模拟某航天器最高仰角为50°左右的飞行弹道。为保证设备安全,在弹道的俯仰角10°以下随机选取某一时刻,进行双机切换,发现误差电压产生较大值,存在明显阶跃现象。选取监控计算机部分记盘数据,如表1所示。
由表1可以看出,切换过程中ACU状态为待机,驱动失去对天线的控制,天线处于惯性运动状态,切换时间最短为450ms,最长为550 ms,即在18~22个发送周期之间,远超过驱动保持速度指令的时间。

表1 原代码操作后监控计算机部分记盘数据
分析跟踪弧段中切换过程,如图5、图6所示。
图5 原程序运行时,双机切换过程方位误差电压图和方位角度变化图
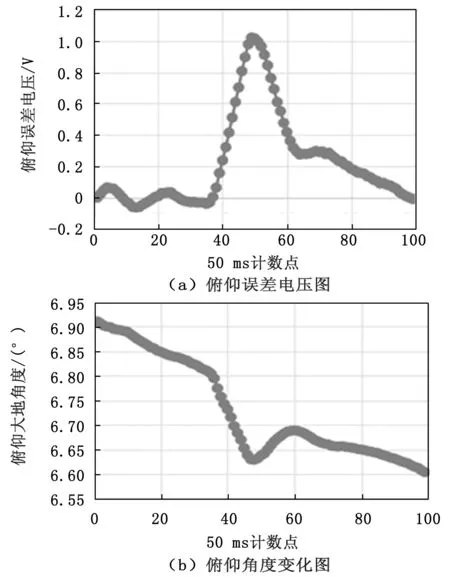
图6 原程序运行时,双机切换过程俯仰误差电压图和俯仰角度变化图
从表1、图5和图6中可以看出,选取数据中第36点至第45点为切换过程。此过程中由于天线处于惯性失控状态,天线偏离角度较大,导致误差电压也产生了较大变化,切换完成后,由于惯性作用,天线还会继续偏开一定角度,并存在超调现象,其方位、俯仰的误差电压分别变化约0.8 V和1 V,方位、俯仰角度分别变化大约0.1°和0.12°,虽然小于S波段天线的半波束宽度,但已经逼近了C波段天线的半波宽度,甚至超过了X波段天线的半波宽度,不能稳定跟踪目标,天线速度提高后,其变化幅度会大幅增加,从而增加了天线的运行风险。
3.2 平稳切换实现
在双机切换的代码中只采用记忆跟踪命令替代原先的待机命令,不增加差分叠加的效果,利用目标模拟器回放上节内容中的跟踪弧段。在相似的切换试验弧段,进行双机切换操作,过程中可以发现阶跃基本消失,误差电压变化在正常范围内。选取监控计算机部分记盘数据,如表2所示。
由表2可以看出,切换过程中ACU状态为记忆跟踪,驱动持续对天线进行速度控制,天线处于正常运动状态。
分析记录数据,可得图7和图8。
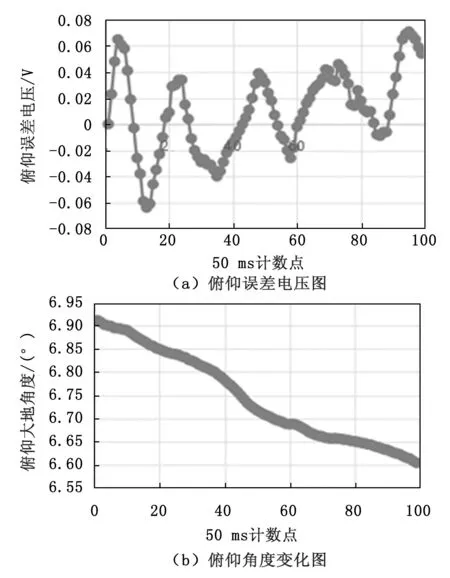
图8 新程序运行时,双机切换过程俯仰误差电压图和俯仰角度变化图
同样选取数据中第36点至第45点为切换过程,由表 2、图 7、图 8中可以看出,此过程中由于天线处于记忆跟踪状态,天线保持的运动速度不变,由于天线整体运动速度不快,因此天线重新转为主跟踪状态时,天线偏离角度很小,误差电压变化也不大,方位最大误差电压变化不超过0.08 V,俯仰基本与正常的误差电压波动相同,方位和俯仰的变化基本与正常变化无异,幅度在C波段和X波段天线的半波宽度内,天线平稳过渡完成,且具有良好的稳定性。
对比图 5~图8,可以看出,切换过程相同的情况下,图 7(a)和图 8(a)中的方位、俯仰误差电压的变化明显分别远小于图 5(a)和图 6(a)中的误差电压变化量,角度变化趋势与误差电压相同,证明方法改进初步成功。
3.3 差分叠加法效果验证
考虑到高仰角弧段双机切换的可靠性,采用修改后的程序,增加差分叠加法平滑处理,并进行效果验证。利用目标模拟器模拟上一节中相同弹道进行检验,在确保安全的前提下,选择在天线仰角运动到20°左右进行试验。
首先不增加差分叠加法,由记盘数据分析可知,当天线俯仰角度在20°左右时,若不利用差分叠加法,天线在切换过程中的运动轨迹与模拟轨迹相比出现了较大角度偏差,偏差值在0.4°左右,天线发生较大阶跃,险些造成天线失去控制,危及天线安全。
若采用差分叠加法进行平滑处理,经过试验,俯仰角度在20°左右时,切换过程中的天线的角度变化基本与正常运行无异,天线过渡平稳,安全有效。进一步选择俯仰角度在40°左右时进行切换,天线运行情况良好,虽然误差电压存在小幅度波动,但主要原因在于高仰角时目标动态滞后的存在,会影响天线的跟踪状态。试验结果表明,差分叠加法效果良好。
5 结束语
针对当前ACU双机切换只能在天线待机状态下进行,导致在跟踪目标过程中切换主、备机会造成天线较大阶跃的问题,分析了跟踪环路及双机切换工作原理,得出产生阶跃的原因是由于切换过程中ACU发送给驱动的速度指令会因为待机命令而变为零,且持续时间较长,致使驱动对天线失去控制,进而提出用记忆跟踪命令替代原程序中的待机命令,并在记忆跟踪的基础上进行差分平滑处理。
结果表明:
1)在低仰角情况下,即使不用差分平滑处理,记忆跟踪也可以有效避免天线的大幅度阶跃,其误差电压变化量不超过0.08 V,效果良好;
2)若需要在高仰角、高动态条件下也能够进行平稳切换,则必须进行差分平滑处理,结果表明,即使存在目标动态滞后的影响,也可以使天线实现平稳过渡,效果良好;
3)改进后的程序同时可以满足船载S、C、X三个频段天线的跟踪要求,增强了双机热备的效能,极大提高了船载伺服动态跟踪的稳定性;
4)改进后的方法也可以运用到光学跟踪环路、引导天线跟踪环路、数字引导环路以及互引导环路中,使天线可以在任何工作模式下都能进行双机切换,提升设备的可靠性。
对于此项改进,受限于实际操作中,若真正出现在线ACU故障无法发出速度指令甚至天线失控的情况,还是需要岗位人员进行判断后进行操作,其判断时间不可控,存在巨大的风险隐患。对此,后续研究中可以考虑用电脑进行故障判断,建立相应的故障检测点,实现ACU双机切换的自动化实现,避免人工操作带来的不确定性和不准确性,此项工作对于海上航天测控具有重要发展前景。
