某车载武器系统光电设备自动化保护装置设计
2021-05-06王率军
魏 国, 王率军, 赵 益, 雷 晗, 岳 通
(西南技术物理研究所,成都 610041)
车载方舱为武器系统提供了必要的操控和工作空间,是武器装备的重要组成部分[1]。车载方舱内通常安装有一些光机电设备,车载方舱外通常需要布置相应的光电探测或发射分系统。而对于新型光电对抗类武器系统,其战斗模块需要安装在方舱顶部视线范围良好的区域,且由不同光电设备组成的战斗模块在工作时应满足其运动自由度要求,运输过程中应具有较好的防砂石撞击和防雨防尘要求。同时,高机动属性要求装备本身具有轻量化和自动化的特征[2]。因此,如何实现车载武器系统光电探测或发射分系统的可靠防护和快速状态转换,尤其是某些易碎精密光电设备的自动化防护设计,是一大难题。
传统的车载方舱多采用翻盖和滑盖装置对舱内光机电设备进行有效防护[3-5]。岳通等[6]针对某武器系统方舱内部导引设备回转半径大、工作范围大的特点,设计了一种新型的大型翻转顶盖装置;李盛蔚等[7]基于某无人机干扰车自动升降雷达装置环境适应性要求,设计了一款可协同车载雷达架设的电动翻转顶盖;李范春等[8]针对某武器装备发射模块快速状态转换要求,设计了一种开盖装置并分析了顶盖开启运动时间的可靠性。传统的翻盖和滑盖装置大多针对具备架撤或升降功能的模块单元,其体积虽大,但高度空间较小,既难以满足某些外露于方舱顶部大尺寸光电设备的保护要求,又无法实现结构美观、功能可靠及整体轻量化。车载武器系统光电设备的自动化防护设计需要提出一种新的方法。
为解决上述问题,现设计一种基于横移翻转机构的自动化保护装置,在满足方舱顶部安装空间要求和战斗模块运动自由度要求的前提下,可为光电设备提供高效防护。该装置结构美观、功能可靠且整体轻量化。详细阐述自动化保护装置的结构组成、工作原理、横移翻转机构设计方法以及该装置的自动化控制原理。最后,通过物理样机对自动化保护装置开展实验评价以验证设计方案的可靠性。
1 光电设备自动化保护技术要求
根据某车载武器系统总体布局方案,其战斗模块外露于方舱顶部,如图1所示。
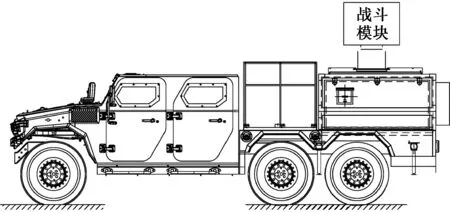
图1 某车载武器系统总体布局方案Fig.1 The scheme of generally special layout for a vehicle weapon system
针对此类新型光电对抗武器系统,其战斗模块光电设备自动化保护技术要求如下。
(1)光电设备由探测和发射分系统组成并集成于伺服转台两侧,共同构成战斗模块。
(2)伺服转台工作状态俯仰转动角度为-5°~+85°。
(3)伺服转台工作状态方位转动角度为0°~360°。
(4)保护装置在闭合状态下,具有较好的防砂石撞击和防雨防尘功能,能够有效地保护武器系统战斗模块,满足运输要求。
(5)保护装置在开启状态下,能够满足武器系统战斗模块回转半径大、工作时无结构干涉且工作范围无遮挡的要求。
(6)保护装置需安装在车载方舱顶部有限的空间内,横移翻转运动安全平稳且自动化程度高。
(7)保护装置操作和维护需简单方便,刚强度好且重量轻,结构美观。
2 自动化保护装置结构组成
2.1 总体结构简介
根据某车载武器系统总体布局方案,光电设备集成于伺服转台两侧并共同构成战斗模块,方舱顶部开设有圆形孔以使伺服转台穿过而外露于方舱工作。按照光电设备自动化保护技术要求,自动化保护装置安装于车载方舱顶部伺服转台开孔两侧;装置闭合时可环抱武器系统战斗模块形成有效防护,保证光电设备在运输过程中具有良好的环境适应性;装置开启时可在方舱顶部迅速平稳展开,保证光电设备在工作过程中无结构干涉、无光路遮挡。其中,传动机构是实现保护装置自动打开/闭合运动的关键。
在传统滑盖装置平移机构的基础上,对组合机构实现复杂运动的规律进行深入研究,提出一种新型的横移翻转机构来实现保护装置的快速状态转换;其控制系统采用可编程控制器(programmable logic controuer, PLC)来实现保护装置运动过程的自动化[9]。为了满足武器装备减重需求,自动化保护装置部分结构件采用碳纤维复合材料以实现轻量化和结构美观。
光电设备自动化保护装置结构组成如图2所示。自动化保护装置主要由左防护罩、右防护罩、导轨安装板、横移机构、翻转机构和机构防护罩等组成。其中,横移机构、翻转机构分别设置在防护罩前后两侧,横移机构实现左右防护罩开启/闭合的平移运动,翻转机构实现左右防护罩0°~90°翻转。整个装置通过导轨安装板固定在方舱顶盖上,机构保护罩固定在导轨安装板上,横移机构、翻转机构分别安装在机构保护罩内以保护运动执行机构。
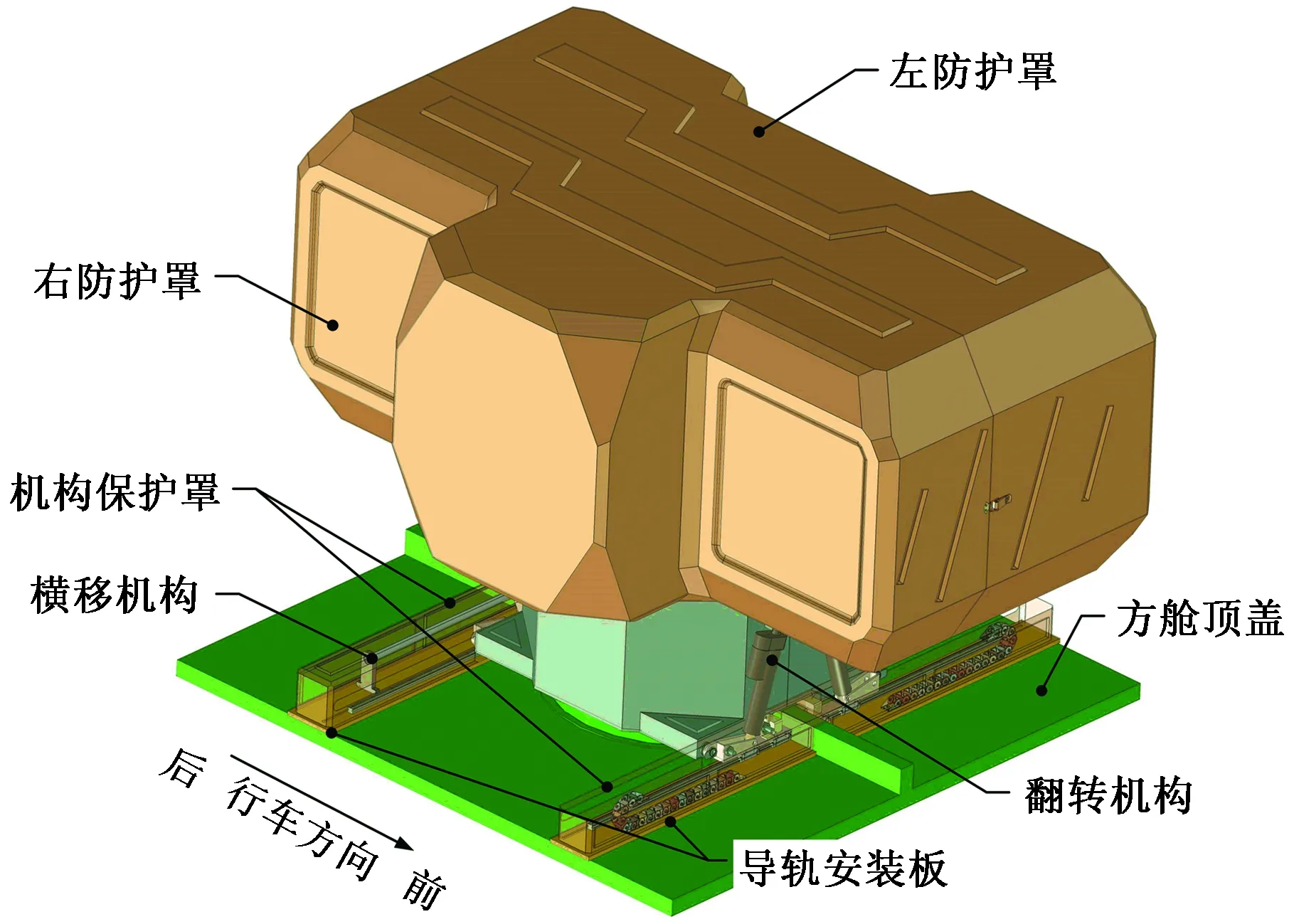
图2 光电设备自动化保护装置结构组成Fig.2 Structure of automatic protection device for photoelectric equipment
2.2 工作原理
设计的光电设备自动化保护装置开启/闭合状态示意图如图3所示。
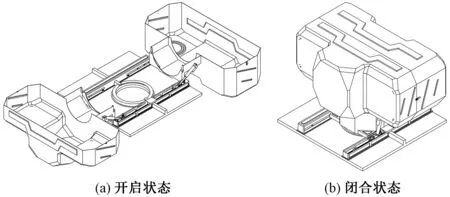
图3 自动化保护装置开启/闭合状态示意图Fig.3 Schematic diagram of opening and closing state of the automatic protection device
当武器系统驻车工作时,自动化保护装置处于开启状态,如图3(a)所示。此时,启动装置开启按钮,横移机构开始运行,伺服电机输出扭矩经过经行星齿轮减速器减速增扭后,驱动左右旋对称丝杆转动,并带动横移平台相向运动,实现左右防护罩以相同速度、相反方向横移运动。横移机构运行到位后,翻转机构开始运行,由左右电动推杆提供动力,推动左右防护罩围绕底部法兰铰支点实现90°翻转。最终,左右防护罩落放在车载方舱顶壁两侧,为武器系统战斗模块回转运动提供充足空间。
当武器系统行车运输时,自动化保护装置处于闭合状态,如图3(b)所示。此时,启动装置闭合按钮,翻转机构开始运行,由左右电动推杆提供动力,拉动左右防护罩围绕底部法兰铰支点实现翻转,翻转运动采用接近开关和机械限位对左右防护罩翻转回位极限位置进行标定和限制。翻转机构运行到位后,横移机构开始运行,由伺服电机输出扭矩经过经行星齿轮减速器减速增扭后,驱动左右旋对称丝杆转动,并带动横移平台相向运动,实现左右防护罩以相同速度、相对方向横移运动。横移运动通过伺服电机计数和扭矩控制进行极限位置标定。最终,左右防护罩相互扣合回位,并使用安装在左右防护罩两侧开合面处的弹簧卡对其进行锁紧。
2.3 横移机构
横移机构主要实现左右防护罩以相同速度、相对方向横移运动。横移机构安装于防护罩前侧并固定在导轨安装板上,包括伺服电机、减速机、丝杆、丝母、横移平台、滑块、直线导轨及联轴器等部件,如图4所示。左右旋丝母分别安装在左右侧横移平台上,防护罩底部法兰固定点分别与横移平台铰接,横移平台底部安装有滑块,分别与直线导轨配合导向,直线导轨安装在导轨安装板上。左右旋对称丝杆通过联轴器连接传动,丝杆与4个支撑座通过轴承固定在导轨安装板上。横移机构由一端伺服电机提供动力,经减速机减速增扭矩后,驱动左右旋对称丝杆转动,并带动左右侧横移平台相向运动,实现左右防护罩以相同速度、相对方向横移运动。
横移机构通过伺服电机计数和扭矩控制进行横移平台极限位置标定,总行程为400 mm。鉴于横移机构运行到位后,左右防护罩需固定在横移平台上进行翻转运动,因此采用梯形丝杆副以保证横移平台位移到位后静态自锁。综合考虑结构强度、传动稳定性和加工工艺性,选用中径16 mm、导程3 mm的梯形螺纹丝杆。
伺服驱动系统作为横移机构平移运动的动力输入,其伺服电机的选型和减速器的设计需要同时考虑载荷因素和产品经济性。运动过程中横移机构的受力状态分析如图5所示,并根据建立的受力分析图进行了扭矩计算。
表1所示为自动化保护装置横移机构传动系统部分技术参数。
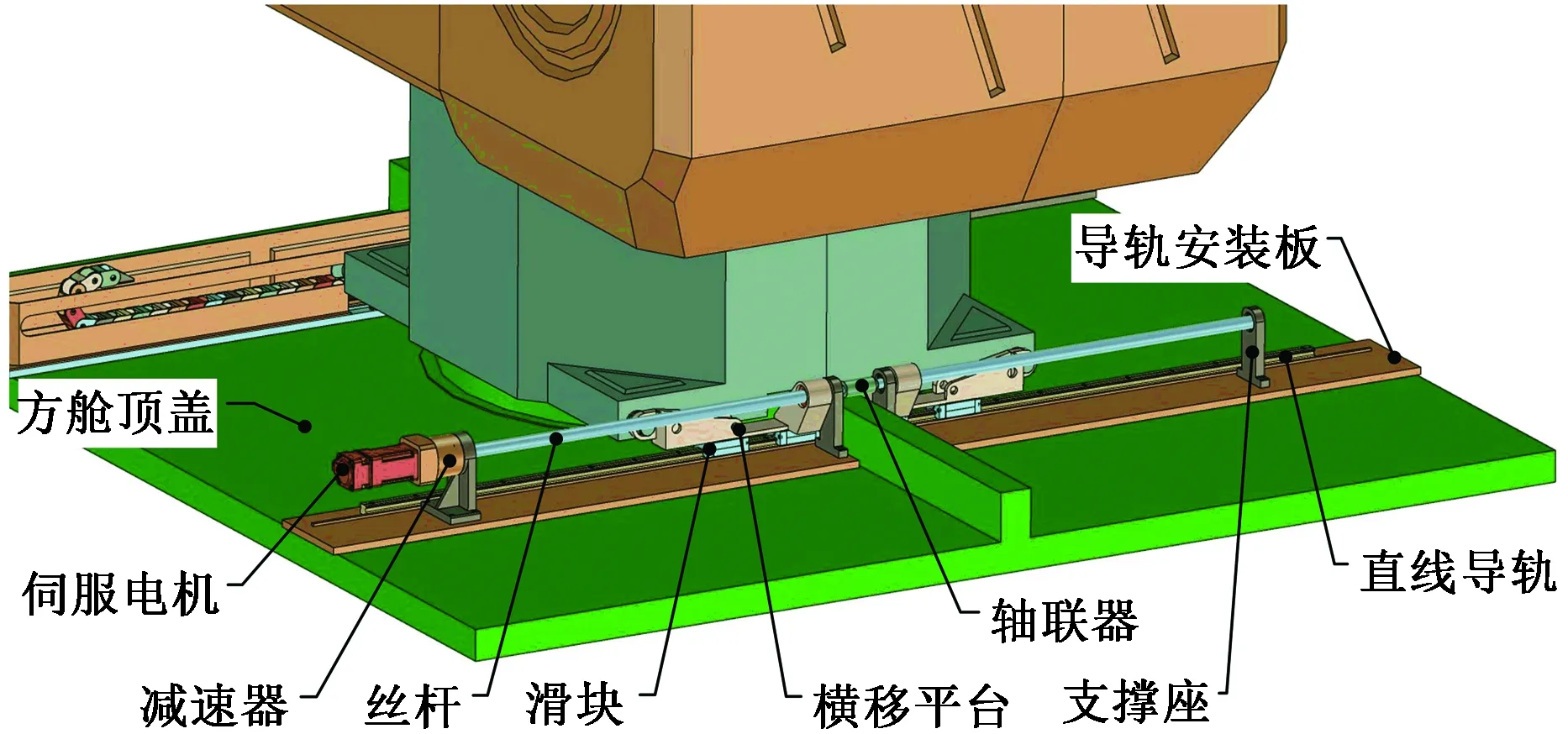
图4 横移机构结构组成Fig.4 Structure composition of the traverse mechanism
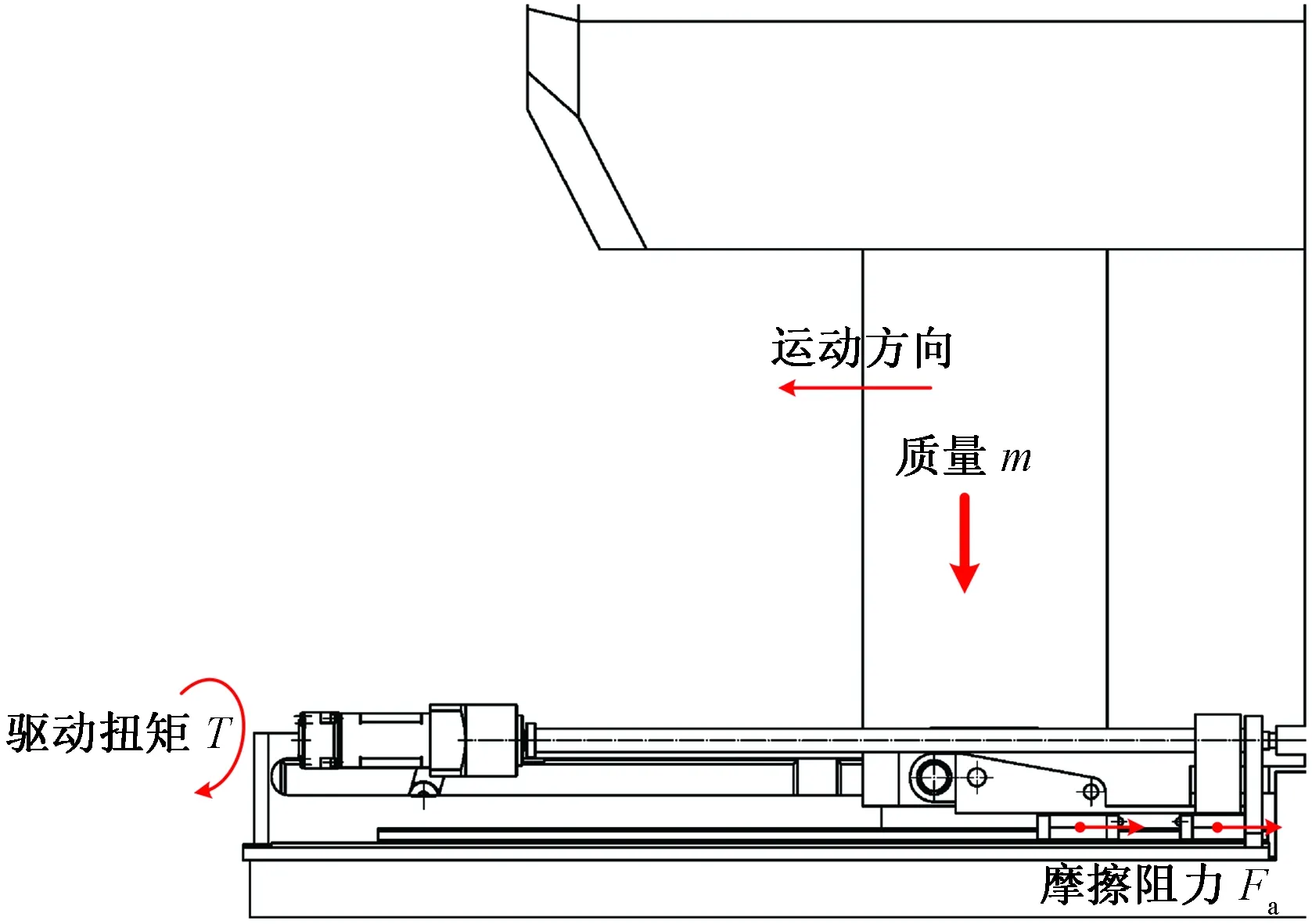
图5 横移机构的受力分析Fig.5 Analysis of the traverse mechanism
由摩擦阻力计算公式Fa=Ktμmg,可求得横移运动产生的摩擦阻力Fa为
Fa=Ktμm1g=529.2 N
(1)
根据计算的摩擦阻力,由丝杆副获得所需推力的驱动扭矩计算公式[10]T=Fal/(2πη),可求得伺服驱动系统所需扭矩为
T=Fal/(2πη)=1.26 N·m
(2)
综合考虑载荷因素并尽可能选用标准产品,横移机构伺服驱动系统选型设计如表2所示。伺服驱动输出扭矩1.6 N·m,即可满足机构横移运动扭矩需求。
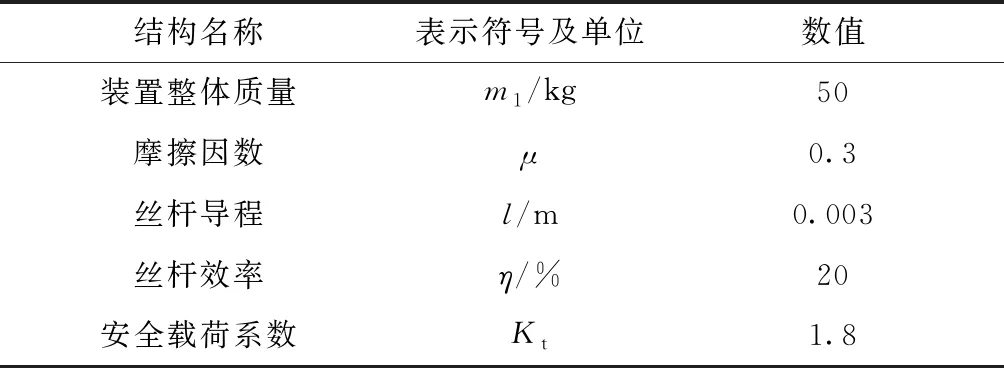
表1 横移机构传动系统技术参数Table 1 Parameters of driving system for the traverse mechanism

表2 伺服驱动系统技术参数Table 2 Parameters of servo driving system
2.4 翻转机构
翻转机构主要由电动推杆提供动力,推拉左右防护罩围绕底部法兰铰支点实现90°翻转运动。翻转机构安装于防护罩后侧并固定在导轨安装板上,包括左右电动推杆、横移平台、滑块及直线导轨等部件,如图6所示。电动推杆上端与防护罩中部固定点铰接,下端与横移平台内侧铰接;防护罩底部法兰固定点与横移平台外侧铰接,横移平台底部安装有滑块,分别与直线导轨配合导向,直线导轨安装在导轨安装板上。翻转机构在横移机构运行到位后,由电动推杆提供动力,推拉左右防护罩围绕底部法兰铰支点实现0°~90°翻转。
翻转机构采用接近开关和机械限位对左右防护罩翻转回位极限位置进行标定和限制。而电动推杆作为翻转机构推拉运动的动力输入,是整个装置能否实现安全平稳运动的关键。为计算电动推杆额定输入扭矩,分析了极限状态下(拉动罩壳瞬间)翻转机构的受力情况,并根据建立的机构原理图进行了扭矩计算,如图7所示。表3所示为自动化保护装置翻转机构部分技术参数。
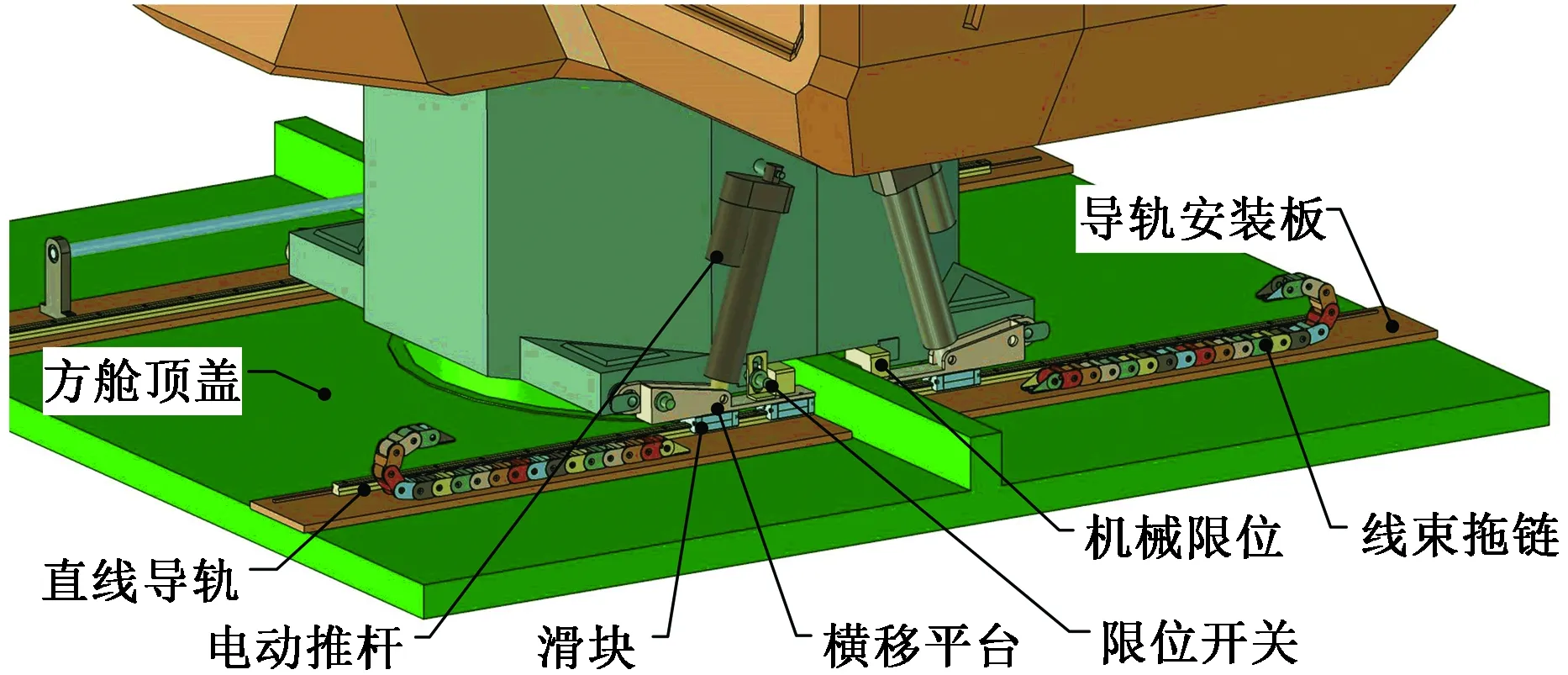
图6 翻转机构结构组成Fig.6 Structure composition of the turnover mechanism
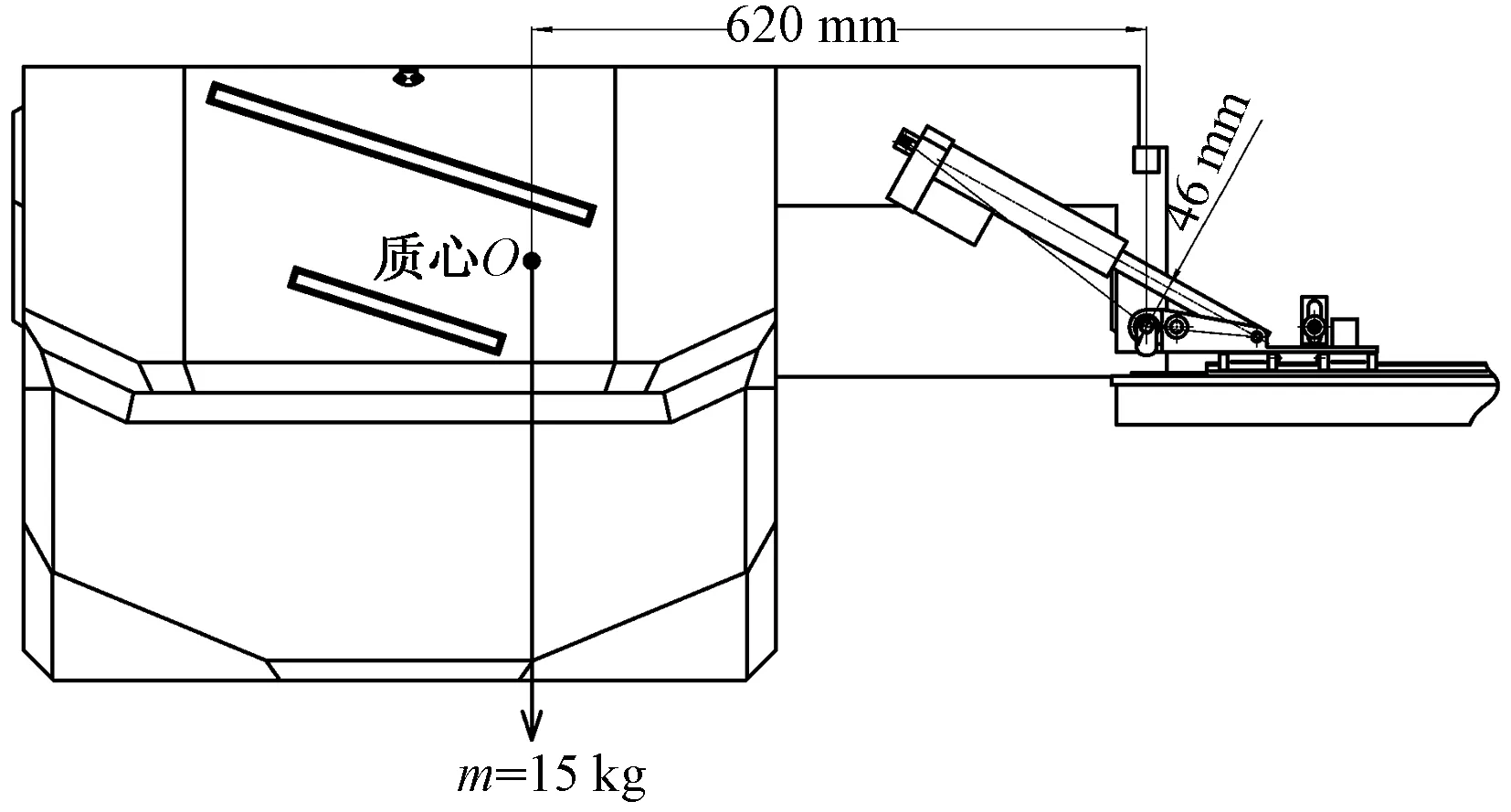
图7 翻转机构的受力分析示意图Fig.7 Analysis of the turnover mechanism
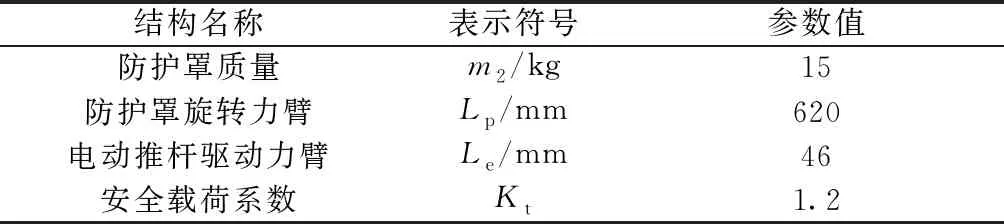
表3 翻转机构部分技术参数Table 3 Parameters of the traverse mechanism
根据表3中参数,由扭矩计算公式Mt=KtmgL[10],可求得防护罩的旋转扭矩负载Mp为
Mp=Ktg2gLp=109.37 N·m
(3)
假设电动推杆最大驱动力为Fmax,由力矩平衡定理可得
(4)
根据计算的驱动力,兼顾翻转机构环境适应性要求及其安装空间和质量,选用额定推/拉力为2 500 N的电动推杆;同时,电动推杆具有IP66级防尘防水功能以保证其工作可靠。
2.5 罩壳结构
整车轻量化设计是实现武器系统机动性的重要途径[2]。为了满足武器装备轻量化要求,左右防护罩壳、机构保护罩及导轨安装板均选用碳纤维复合材料,采用预浸料热压罐成型工艺制备。该工艺具有产品纤维含量高、力学性能好和质量轻等特点,尤其适用于制造大尺寸薄壁结构件。
设计的碳纤维左右防护罩壳结构示意图如图8所示。罩壳主体结构采用碳纤维斜纹预浸料一体成型,主体厚度为1.2 mm。罩壳整体结构分为上部保护层、中部过渡层、底部法兰及加强筋,上部保护层与中部过渡层采用碳纤维预浸料逐层搭接增厚至2 mm。罩壳中部过渡层及底部法兰与执行机构铰接位置预埋铝板,采用销柱螺接形式预留连接接口。左右防护罩闭合面采用L形卡槽方式配合密封以实现IP54级防尘防水功能。L形卡槽与罩体一体成型,密封橡胶安装在L形卡槽内。
刚性不足是大尺寸薄壁结构件存在的主要问题。为兼顾产品美观和结构可靠,左右防护罩壳外表面光滑平整美观,内表面相应位置具有多个加强结构,加强结构设置在防护罩壳体与底座法兰连接过渡处。左右防护罩壳加强结构示意图如图9(a)所示,采用聚氨酯泡沫材料制成长条状的加强筋粘贴在罩壳内表面。实际产品生产情况如图9(b)所示,结果表明,左右防护罩壳整体刚度满足使用要求,产品功能符合环境适应性指标。
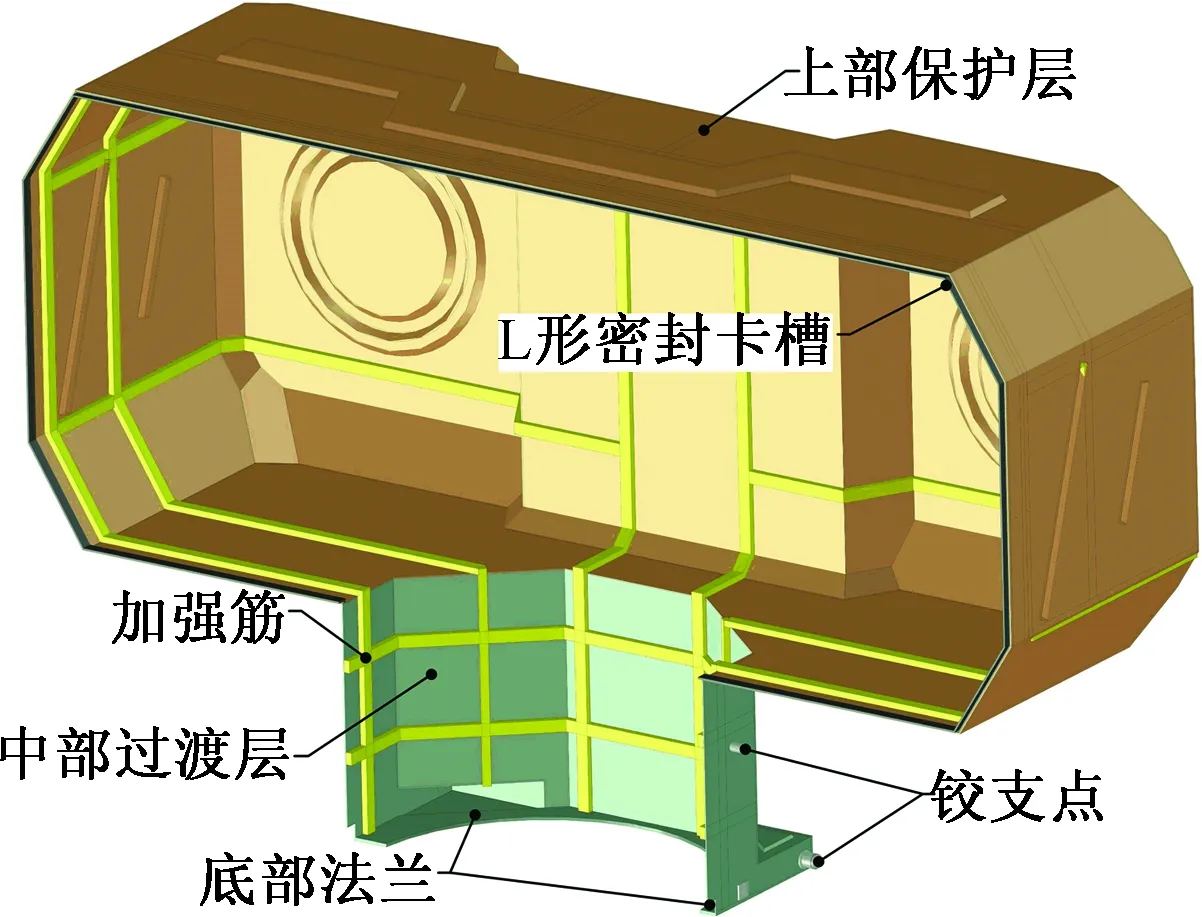
图8 罩壳结构示意图Fig.8 Structure diagram of the housing
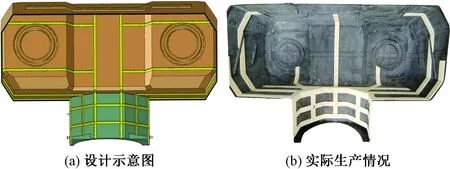
图9 罩壳加强结构示意图Fig.9 Structure diagram of the enhanced housing
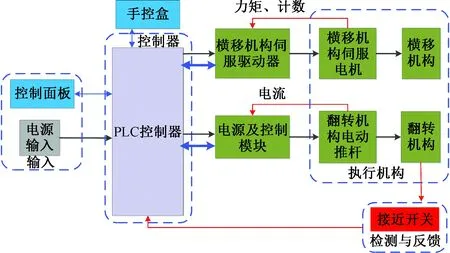
图10 自动化保护装置系统控制原理框图Fig.10 Control principle of the automatic protection device system
3 自动控制原理
自动化控制是实现武器系统快速状态转换的关键技术,为保证光电设备自动化保护装置自动安全平稳运行,采用PLC控制器结合外部传感器闭环控制来实现装置运动过程的自动化。整个装置的控制原理如图10所示:当操作控制面板或手控盒上的开启/闭合按钮时,PLC控制器接收按键命令并输入至内部输入映像缓冲区,PLC读取输入映像缓存区指令,按照软件逻辑执行自动化保护装置的开启/闭合运动控制;控制系统通过外部传感器等方式检测各执行机构运动位置,从而实现闭环控制。
根据光电设备自动化保护装置工作原理,横移机构通过伺服驱动器采集电机转动圈数和电机运行转矩数据,并将横移机构直线运动距离转化为电机运行圈数,即可获得机构当前的运动位置。横移运动以闭合位置为原点,运动行程为400 mm,预设电机最大计数值作为横移机构运动极限的位置标定。同时,为防止多次运动后电机旋转产生累计误差,在横移机构运行到位处设置机械限位,使得闭合时可通过电机旋转计数结合转矩标定的方式判定极限位置。自动化保护装置翻转运动通过翻转电动缸实现,翻转电动缸由直流电机驱动,通过接近开关检测防护罩打开/闭合位置;为防止接近开关出现故障时机构运行产生问题,同时检测翻转电机运行转矩并设置电机转矩阈值作为翻转电动缸运行极限状态的辅助标定。
4 实验验证
为了验证设计方案的可行性,通过物理样机对自动化保护装置开展了实验评价。
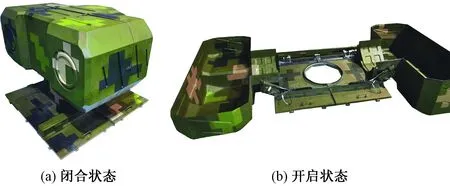
图11 自动化保护装置样机Fig.11 Prototype of the automatic protection device
如图11所示,由定性分析物理样机开启/闭合运动状态可知,自动化保护装置闭合时可环抱武器系统战斗模块形成有效防护,保证光电设备在运输过程中具有良好的环境适应性;自动化保护装置开启时可在方舱顶部迅速平稳展开,保证光电设备在工作过程中无结构干涉、无光路遮挡。同时,保护装置横移翻转运动安全平稳、自动化程度高、操作和维护简单方便、刚强度好且结构美观。
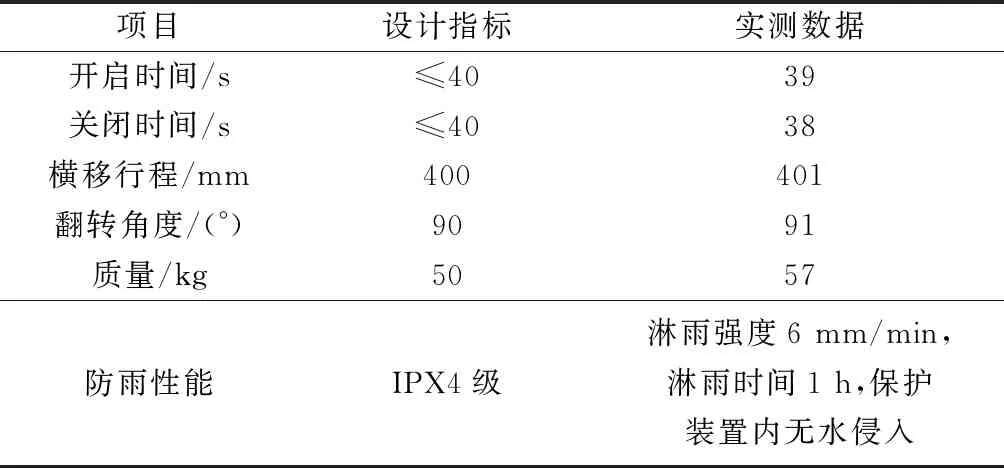
表4 实测数据与设计指标对比统计表Table 4 Comparison between measured data and design indexes
如表4所示,由定量对比自动化保护装置实测数据与设计指标可知,整个装置开启/闭合运动参数在设计指标范围内,横移翻转运动迅速平稳、运动精度高。保护装置在闭合状态下,具有较好的密封性和防雨防尘功能。然而,自动化保护装置整体质量稍大于设计指标。机构设计过程中选取的安全系数稍大和复合材料成型工艺计算偏差是导致质量增加的主要原因。质量指标在不影响全系统性能的前提下可以适当放大。
5 结论
针对某车载武器系统光电设备自动化防护需求,设计了一种基于横移翻转机构的自动化保护装置,并给出基于该机构的自动化保护装置结构组成、工作原理、驱动系统选型设计和控制原理,最后通过物理样机对自动化保护装置开展了实验评价。
(1)横移翻转机构可实现自动化保护装置的快速状态装换:横移机构完成左右防护罩开启/闭合的平移运动,翻转机构完成左右防护罩0°~90°翻转。横移翻转机构可集成在车载方舱顶部有限的安装空间内。
(2)使用碳纤维复合材料,采用预浸料热压罐成型工艺实现了自动化保护装置的轻量化设计。左右防护罩壳采用碳纤维整体成型结合聚氨酯泡沫局部加强的方案,保证了产品轻质美观、刚强度好。
(3)采用PLC控制器结合外部传感器闭环控制,实现了自动化保护装置运动过程的自动化,且整个横移翻转运动安全平稳。
(4)物理样机实验结果表明,自动化保护装置闭合时可环抱武器系统战斗模块形成有效防护,保证光电设备在运输过程中具有良好的环境适应性;开启时可在方舱顶部迅速平稳展开,保证光电设备在工作过程中无结构干涉、无光路遮挡。
