编队式自主水下航行器无碰协调控制技术研究*
2021-05-06侯新国
侯新国,潘 昕,毕 敏
(1.海军工程大学电气工程学院,武汉 430033;2.湖北宜昌测试技术研究所,湖北 宜昌 443000)
0 引言
编队式自主水下航行器(AUV)具有作业效率高、功能全面的优势[1],在海洋勘探、预警搜索侦察等方面有重大的应用价值。AUV 编队控制的核心思想是让多个具有简单功能的AUV 有机地组成一个团队,团队中每个成员都分配有各自的任务,通过一定的控制策略,完成给定的复杂任务。在编队航行的协调控制中,AUV 如何跟随各自相应的参考路径曲线是协调控制的关键,即AUV 的路径跟踪问题[2-8]。文献[2-6]基于不同的方法提出了不同的跟踪控制器,在某些特定指标上得到了较好的控制效果。另外,编队式航行中必须保证相邻AUV 位置的约束关系[7-9],只有满足路径跟踪和相互间的约束关系,AUV 才能作为一个整体协调运动。
另一方面,编队式AUV 在航行时,由于编队控制中个体的目标任务或运行状态的不同,AUV 之间存在避障问题,如何躲避障碍物的碰撞,也是研究的难点。文献[10]讨论了基于模糊推理的避碰策略与路径跟踪行为相结合的策略,但文献中将避碰对象简化为常规障碍物(指一般不存在避碰意识的物体)的处理是不够完备的。编队航行中智能体间的避障与常规障碍物的避障存在差异,如果采用传统避障方法如模糊推理方法[10],时间系数分层控制策略[11],混合整数线性规划[12]等方法,避碰时会引起相互智能体间产生摆动效应,甚至导致避碰失败[13]。文献[13]提出了互惠避障策略(Reciprocal Velocity Obstacle,RVO)概念,对两个智能体间的避碰定义了具体的策略,智能体仅需要调整速度到互惠速度区域之外,则两个AUV 就不会发生碰撞。文献[14-16]在RVO 概念的基础上,进一步提出了混合互惠避障策略(Hybrid Reciprocal Velocity Obstacle,HRVO),扩大了RVO 的应用场景,将其推广到多智能体避障的环境。本文以X Y-水平面运动的欠驱动AUV 为研究对象,将级联方法的编队航行协调控制方法与HRVO 避障策略相结合,提出了一种基于AUV 编队式航行的无碰协调控制技术,使各AUV可以同时避开一般障碍物和其他AUV 的碰撞危险,快速收敛到各自的参考路径,保持编队的协调一致性。
1 AUV 控制系统结构
图1 为AUV 控制决策中的编队协调控制模块和避障模块。在编队控制模块中,首先单个AUV 根据预设的参考路径,利用级联的方法设计路径跟踪控制器,控制每个AUV 跟踪上自身的参考路径;再利用路径参数一致性算法,使得各AUV 在编队中达到期望的速度和位置,并在每一步的计算中输出需调整的角度和速度。在局部避障模块中,通过自身的感知设备和通信设备感知存在可能发生碰撞的障碍物,然后将它们的速度和方位信息输入到AUV 中,再利用改进的HROV 避障算法得到调整以后的新速度。最后,在行为协调模块中根据仲裁规则决定最终的转向和变速指令,并将其转化为相应的力矩输入到AUV 中从而更新自身的运动状态。

图1 编队运动中AUV 的控制系统结构
2 基于级联的AUV 编队协调控制
2.1 编队中的AUV 运动模型
在Serret-Frenet坐标系中建立AUV 的运动模型[8],引入地面坐标系{N},载体坐标系{B}和参考曲线上点的切矢向量构成的坐标系{SF},如图2所示。图中,β 表示侧滑角,φe数值等于航向角φ 与路径参考点P 的方位角φp之差,定义为航向角跟踪误差。

图2 Serret-Frenet坐标系下AUV 运动模型
AUV 水平面的运动方程如式(1)所示。


式中,ηi表示第i 个AUV 的实际位置;ηpi表示该AUV 在参考路径上的虚拟参考点;vL表示编队期望路径变化率。式(6)表示编队中的各AUV 应满足自身的路径跟踪要求,式(7)~式(8)表示AUV 整体一致性的要求。
2.2 编队协调控制设计
用期望前向速度ud定义期望侧滑角βd和期望合成速度Ud,在计算中用期望侧滑角代替实际侧滑角,可有效避免对输入X 的一阶导数进行计算[9]。如下式所示。
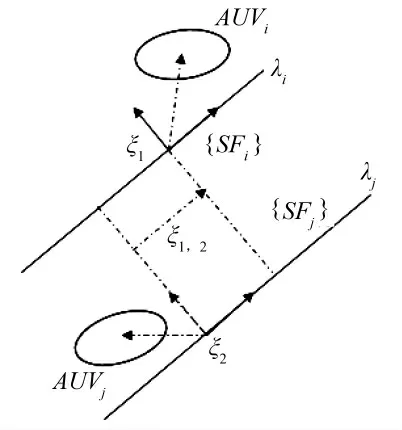
图3 编队航行中AUV 的相对位置

将式(9)~式(10)代入式(4)~式(5),可得:


研究名义系统

定义Lyapunov 函数

并令其导数负定,结合文献[6,10]中单AUV路径跟踪控制器设计,可得编队控制各控制参数应满足:

3 AUV 避障策略
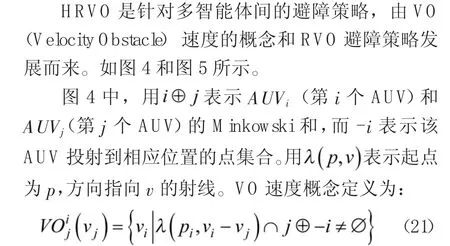

图5 HRVO 避障策略


本文选择HRVO 和VO 速度概念相结合的方式作为编队中AUV 的避障策略,编队集合记为A,对于AUVi,与其他可能发生碰撞的AUVj采用HRVO 避障策略,而与一般障碍物的避障则采用VO 速度避障策略,总的避障策略可表示为下式。

4 行为协调机制

5 仿真实验
为验证本文提出的AUV 编队式航行无协调控制技术,本文以R EM U S[19]型AUV 为研究对象,在Matlab 仿真软件中进行仿真实验。实验分为两个部分,编队协调控制技术验证和加入障碍物的无碰协调控制技术验证。



图6 AUV 编队协调控制


图7 AUV 无碰路径跟踪技术示意图
6 结论
本文提出了一种包含编队协调控制和无碰策略等多种基本行为融合的多自主水下航行器无碰协调控制技术,仿真结果表明,该算法满足设计要求,可在多种障碍物环境下形成编队控制。
