轻型货车电动助力转向系统控制策略研究
2021-04-30林慕义
刘 清,林慕义,2,陈 勇,2
(1.北京信息科技大学机电工程学院,北京100192;2.北京电动车辆协同创新中心,北京100192)
1 引言
电动助力转向系统(Electric Power Steering)是利用助力电机产生力矩加载到转向轴上,辅助克服转向阻力,来达到减轻驾驶员的转向操纵难度和减轻疲劳感的目的。随着电控技术的发展,驾驶的安全性和舒适性也成了设计控制策略的一项重要内容,转向回正和高速阻尼控制显然对此大有裨益。当车辆在较低速度进行回正操作时,由于回正力矩较小,使回正速度过慢,无法确保转向盘能回到中间位置,另外汽车高速运行时的回正力矩会明显偏大,很容易导致回正过度,甚至是方向盘的抖动。汽车高速直线行驶时,路面对车轮的随机输入会引起车轮偏转,汽车会偏离直线行驶,影响驾驶的安全性。本田汽车公司首先将回正控制单独作为EPS 系统的控制模式进行开发,经过几十年的发展回正控制技术已经比较成熟,在不少中高端车辆的EPS 系统已经配备回正控制,但国内在这方面的研究还处在理论开发阶段,且对轻型货车EPS 系统的研究尚处初始阶段,轻型货车EPS 系统转向的控制精度和操纵稳定性方面尚有较大的提升空间[1-3]。综上,为了提升轻型货车EPS 系统的转向控制精度和操纵稳定性,提出了新的EPS 系统控制策略。首先建立轻型货车的整车二自由度转向数学模型和EPS 系统动力学数学模型,然后在MATLAB/Simulink 中设计EPS 系统基本助力、回正及阻尼控制策略的模型并进行仿真分析,最后基于dSPACE 对设计的控制策略性能进行试验台验证测试,力求对后续轻型货车EPS系统的进一步开发提供参考依据。
2 EPS 系统数学模型
2.1 整车二自由度转向模型
为了简化复杂的汽车系统,在建立整车二自由度模型时假设汽车只做平面运动,忽略左右车轮轮胎特性的变化,且左右车轮的转向角相等。那么简化后的线性二自由度模型实际上是一个较简单的两轮摩托车模型。整车二自由度转向模型,如图1 所示。图中:O—简化后的汽车质心;OXY—车辆坐标系;Z—轴垂直于地面且向上为正[3-7]。整车二自由度模型参数及定义,如表1 所示。
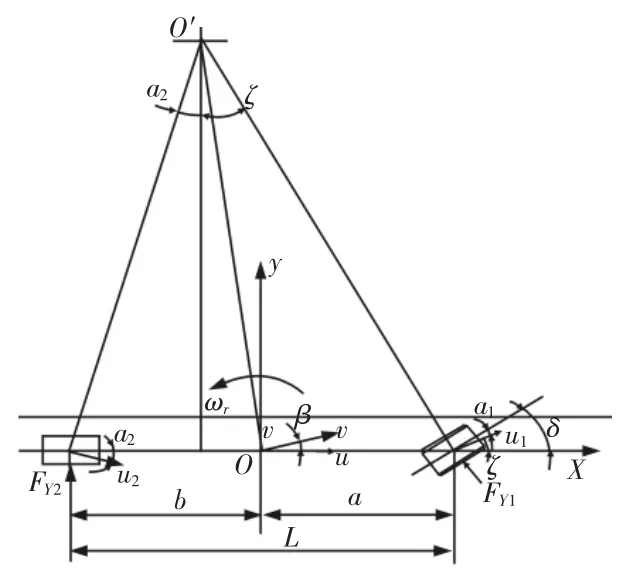
图1 整车二自由度模型Fig.1 Vehicle Model of Two Degree-of-Freedom
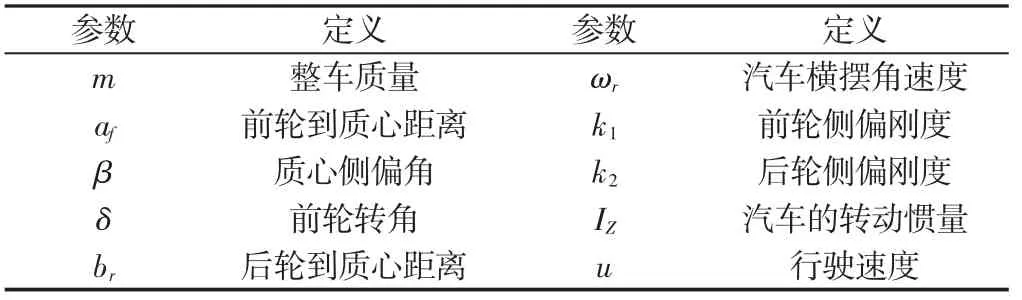
表1 整车模型参数Tag.1 Vehicle Model Parameters
该整车二自由度模型的运动微分方程为:

2.2 EPS 系统动力学模型

图2 EPS 系统动力学模型Fig.2 EPS System Dynamics Model
EPS 系统的简化模型,如图2 所示。EPS 系统主要包括转向盘、传感器、ECU、电动机、减速器、转向螺杆等部分[8-9]。在建立模型过程中考虑到每一个结构的惯量和阻尼等物理特性,而不考虑非线性的影响因素。
EPS 系统动力学微分方程如下所示。

式中:Jk—转向盘转动惯量,kg·m2;θ—方向盘转角,rad;Tk—方向盘的输入扭矩,N·m;Ks—转矩传感器的扭转刚度,N·m/rad;δn—循环球转向器螺杆的转角,rad;Bk—摩擦阻尼系数,N·m·s/rad;Tc—传感器的输出测量值,N·m;Jn—等效到转向螺杆上的总转动惯量,包括螺母、钢球,转向摇臂,至车轮部分等效到转向螺杆的转动惯量,kg·m2,Bn—转向器至车轮传动部分总的等效阻尼系数,N·m·s/rad;Ta—电机的输出转矩,N·m;Nm—电机减速装置的传动比(蜗轮蜗杆传动比);Tf—折算到转向螺杆上的转向阻力矩,N·m;Jm—电机转动惯量,kg·m2;θm—电机转角,rad;Ta—电机输出力矩,N·m;F—轮胎所受的侧偏力,N;Th—回正力矩,N·m;k—侧偏刚度,N/rad;d—轮胎纵向拖距,m;αf—前轮侧偏角,rad;β—质心侧偏角,rad;δ—前轮转角,rad;a—质心到前轴的距离,m;u—车速,m/s。
3 系统控制策略及仿真
EPS 系统的助力控制采用内外环控制策略,内环控制为电机控制,采用PID 控制策略[9],外环控制为目标电流控制,包括基本助力控制、回正控制及阻尼控制。
3.1 基本助力控制策略及仿真
电机输出的助力矩是通过助力特性曲线来确定的。由于直线型助力特性曲线简单、便于设计与调试,选择直线型助力特性曲线。在MATLAB/Simulink 中搭建EPS 控制系统模型并进行仿真得到助力电流特性仿真曲线与设计曲线对比图,如图3 所示。

图3 助力电流特性仿真曲线与设计曲线对比图Fig.3 Comparison of Simulation Curves and Design Curves of Power Assisted Current Characteristics
3.2 回正控制策略及仿真
回正所表现的是否为助力或者是阻尼,因素是方向盘角度值和转速,回正时,对方向盘转角采用PID 控制,具体表达式是:

式中:U—回正状态下的电机电压控制信号;θk—方向盘角度值;k—方向盘角速度;Kp,Ki,Kd—PID 控制器参数。
当汽车行驶速度不大时,为了补偿不足的回正力矩,使用PI控制进行补偿,式(4)变为:

在高速行驶速度较大时,为了抵消过大的回正力,采用PD控制,此时电机表现为抑制效果,防止过度回正,即:

如果汽车是处于稳定行驶状态时,Kp,Ki,Kd为定值,汽车行驶速度增大时,Kp,Ki会逐渐变小,而Kd会变大,也就是利用助力电机产生适当方向的力矩实现补偿和阻尼的相结合的方式来实现方向盘的快速回正以及速度较大时对路感的感知度。
在MATLAB/Simulink 中搭建回正仿真模型,如图4 所示。并按照国标《GB/T6223.2-1994 汽车操纵稳定性试验》中有关汽车转向回正的要求完成仿真试验。
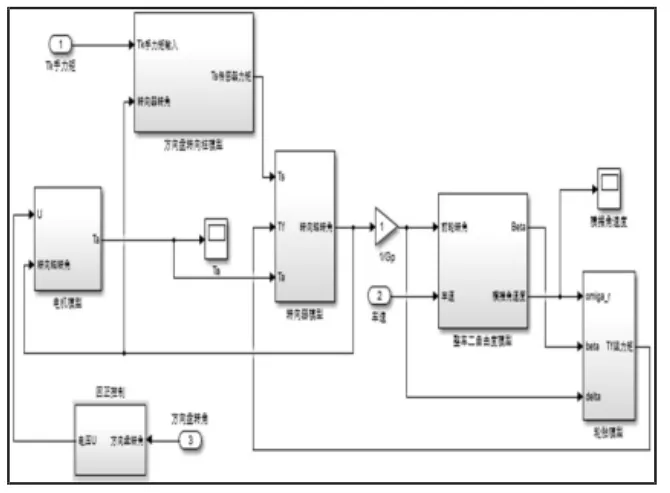
图4 回正控制仿真模型Fig.4 Return Control Simulation Model
3.2.1 低速阶段的回正仿真
当车速设置成30km/h,驾驶员施加转向力矩为5Nm,待稳定,4s 后,松开转向盘,得到在回正时,转向盘转角和横摆角速度值变化曲线,如图5 所示。

图5 转向盘转角变化曲线Fig.5 Steering Wheel Angle Change Curve
实线和虚线分别表示有回正控制和自由回正时转向盘角度值曲线,不难发现加入回正控制之后转向盘能快速回到零位,而自由回正时,低车速下回正力小,转向盘角度还有一定残余量,如图5 所示。横摆角速度变化情况,如图6 所示。
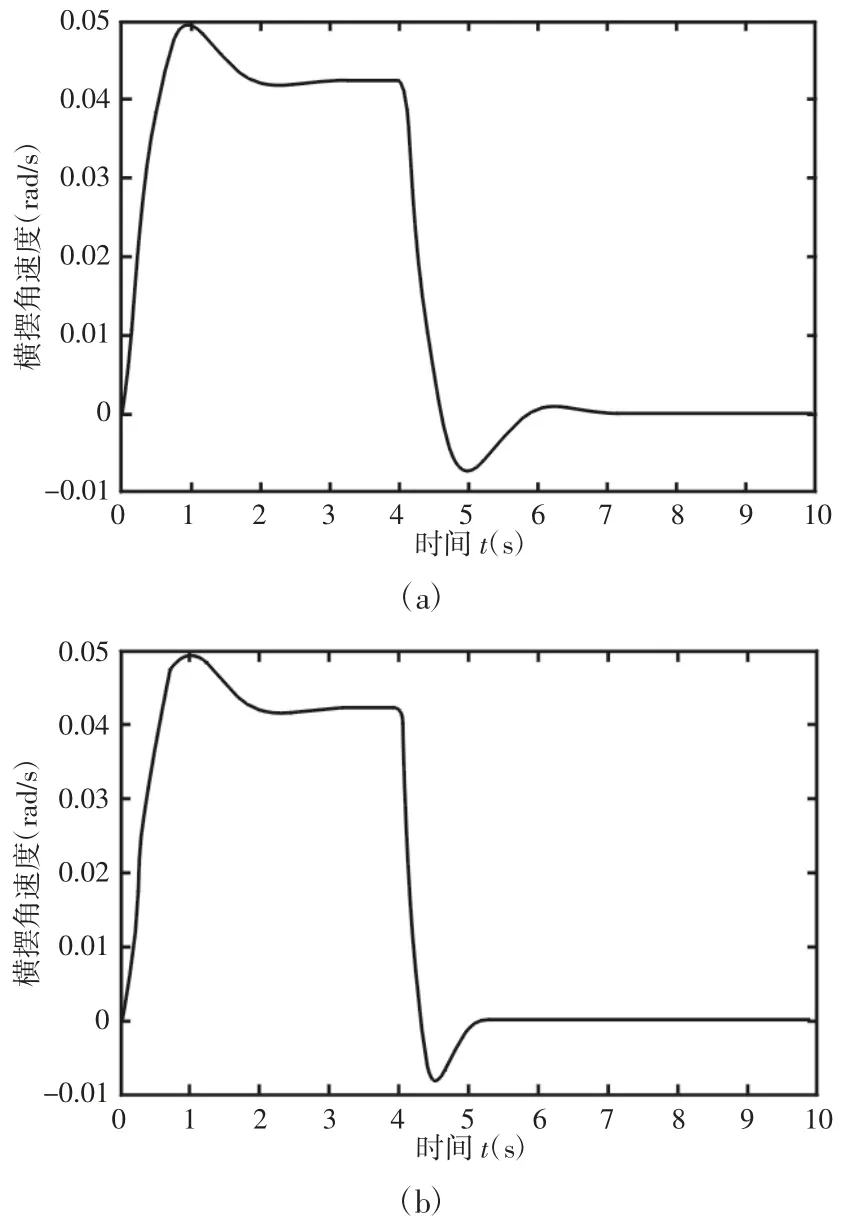
图6 横摆角速度变化曲线Fig.6 Yaw Rate Curve
图6(a)和图6(b)分别表示自由回正和回正控制时,横摆角速度的变化曲线,从图中可以看出,加入回正控制之后较自由回正时的横摆角速度稳定时间要小,且能更快到达稳定状态。
3.2.2 高速阶段的回正仿真
把车速提高到70km/h,采用和车速为30km/h 时相同的条件,转向盘输入为5N·m 时,进行仿真,同样可以得到转向盘转角值和横摆角速度的变化曲线,如图7 所示。
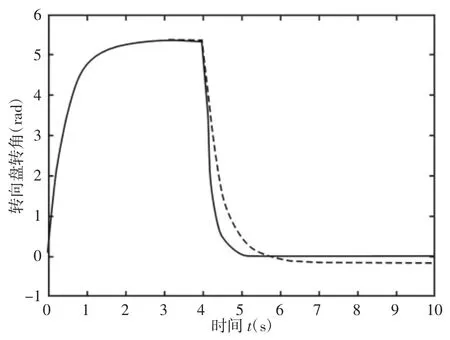
图7 转向盘转角变化曲线Fig.7 Steering Wheel Angle Change Curve
实线和虚线分别代表主动回正控制和自由回正下的转向盘角度值变化情况,如图8 所示。不难看出,车速较大时,回正力大,自由回正时出现了回正超调,而采用回正控制之后,转向盘很快地回正到了中间位置。横摆角速度变化情况,如图8 所示。图8(a)和图8(b)分别代表主动回正控制和自由回正下的横摆角速度(rad/s)变化,可以发现有回正控制时,稳定时间为2s,自由回正时,到达稳定的时间为4s,施加主动回正之后稳定时间要少得多。

图8 横摆角速度变化曲线Fig.8 Yaw Rate Curve
3.3 阻尼控制策略及仿真
由于这里的助力电机采用的是永磁直流有刷电机,故选用电机端电压短路的方式来产生阻尼力矩,此时电机的电流表达式为:

式中:Kb—反电动势常数;ωm—电机转速;R—电机内阻。
式(7)的意思是,在电机转动时,利用其产生的反电动势来阻碍电机继续转动,从而产生制动力,避免了汽车在高速行驶时转向太快,保证了汽车行驶的直线性和减小波动,改变占空比能调节阻尼力矩的大小,占空比的大小应该与车速正相关,这样阻尼效果会越明显。
阻尼力矩的大小可表示为:

式中:KD—阻尼控制系数,由车速和电机角速度决定,表示为:

式中:a,b,c,d—修正系数,均为常数。
在进行阻尼控制时,ECU 控制器先根据测得的扭矩传感器信号和车速信号,判断能否满足阻尼控制模式的条件,当此时车速大于阻尼模式的阈值(80km/h),并且转向盘转矩小于Td0,那么将会开始施加阻尼控制。
在MATLAB/Simulink 中搭建EPS 系统的阻尼控制仿真模型,如图9 所示。
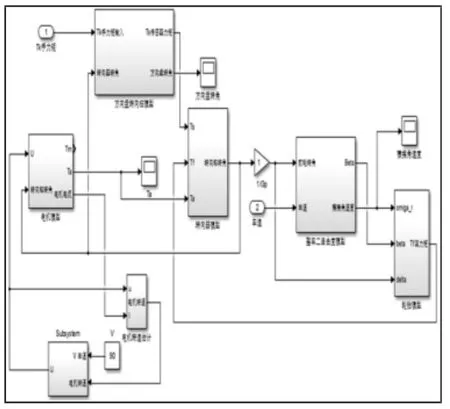
图9 阻尼控制仿真模型Fig.9 Damping Control Simulation Model
设定车速为90km/h,采用方向盘转矩单位阶跃输入,对比有无阻尼控制下的汽车横摆角速度的单位阶跃响应,如图10 所示。
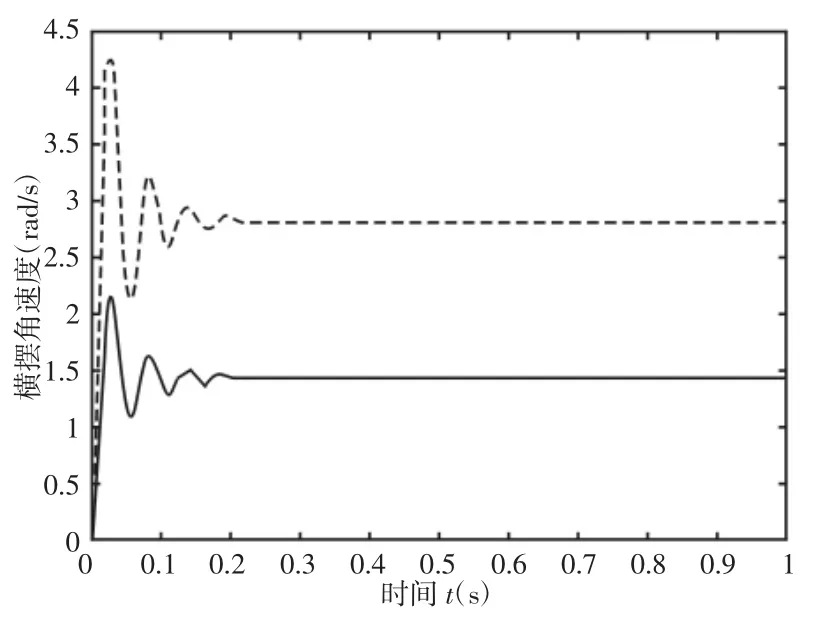
图10 横摆角速度单位阶跃响应Fig.10 Unit Step Function Response of Yaw Rate
由横摆角速度(rad/s)的变化曲线可知,对比虚线没有阻尼控制来说,实线施加了阻尼控制之后汽车的横摆角速度稳态幅值更小,超调量也更小,进入稳态的时间也更短,说明在加入了阻尼控制之后,当汽车在高速行驶时,大大提高了汽车的行驶稳定性。
4 EPS 系统试验测试
4.1 试验台的基本组成
搭建的实验台主要包括转向系统和dSPACE 控制系统,另外还有各类传感器和电机驱动板等。实验平台实物图,如图11 所示。

图11 dSPACE 控制系统Fig.11 DSPACE Control System
4.2 EPS 系统性能试验
在所搭建的EPS 快速控制原型试验台上,在以上仿真的基础上分别进行了助力控制策略试验验证和回正控制策略及阻尼控制策略的试验验证。
4.2.1 基本助力特性试验
在模拟原地转向的工况下,分析使用PID 助力控制策略的EPS 系统电机电流与目标电流的跟踪曲线。试验结果,如图12 所示。

图12 基本助力特性试验Fig.12 Basic Assistance Characteristic Test

图13 回正特性试验Fig.13 Return Characteristic Test
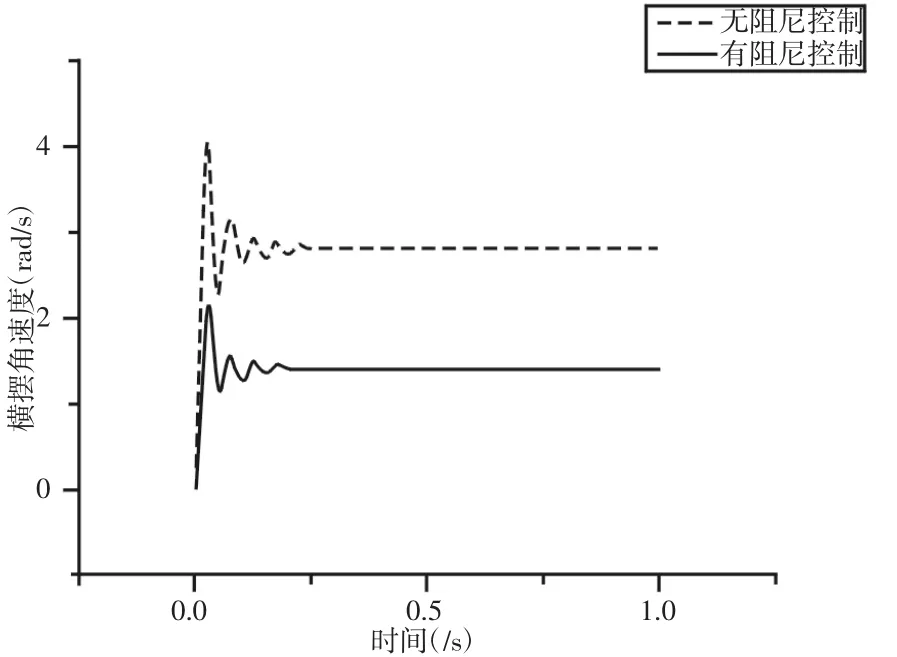
图14 阻尼特性试验Fig.14 Damping Characteristic Test
4.2.2 回正特性试验
车速设为0km/h,将方向盘转动到90°位置后放手,比较自由回正和加入回正控制的EPS 系统,转向盘转角随时间的变化情况。试验结果,如图13 所示。
4.2.3 阻尼特性试验
车速设为90km/h,采用方向盘转矩单位阶跃输入,对比有无阻尼控制下的汽车横摆角速度的单位阶跃响应,试验结果,如图14 所示。由上述试验验证可知,与仿真结果比较后,试验结果达到了预期的目标,证明了此次设计的正确性。
5 结束语
在总结国内外对于EPS 系统控制方法及其控制器的开发经验基础上,展开轻型货车的EPS 系统研究工作,结果表明:(1)采用加入回正、阻尼控制之后的新EPS 系统控制策略后,控制效果良好,整车控制稳定性得到了显著提高,有效地抑制了回正超调和不足的现象。(2)实时仿真测试试验结果表明,设计的控制策略达到了预期的目标,验证了仿真结果,基本助力控制、回正控制及阻尼控制性能均达到了要求。(3)采用的EPS 系统新控制策略和试验与仿真相结合的设计方法对后续轻型货车EPS 系统的进一步开发提供了参考依据。