基于混合信息的运动目标检测优化研究
2021-04-29徐武郭兴文聪唐文权孔玲玲
徐武,郭兴,文聪,唐文权,孔玲玲
云南民族大学 电气信息工程学院,云南 昆明 650500
近些年,运动目标检测被广泛用于视频检测及工业检测等方面。运动目标检测主要功能是快速、准确地将视频中的运动目标提取出来[1]。
部分学者提出,利用颜色图像信息或者是深度图像信息进行目标检测[2]。文献[3]利用深度图像信息进行目标检测,再利用“与运算”进行特征信息融合,改善了目标与背景模型距离较近的问题,但是没有考虑到光照突变对实验本身的影响。文献[4]采用颜色信息进行前景目标的检测,但是当背景模型是复杂多变的情况时,该种方法难以解决问题。文献[5]分别利用彩色图像特征与深度图像特征进行目标检测,通过逻辑运算将特征信息进行融合处理,但当边缘存在噪声点时,检测效果明显降低,且存在漏检现象[6]。
针对以上存在的问题,本文在RGB色彩空间模型的基础上,采用SOFM模型改善色彩空间颜色的真实性;再根据像素值的边缘特性以及上一帧图像的检测信息,为分类器分配合适的权重值,解决彩色视频检测存在的问题。
1 颜色空间建模
由于大部分视频都为彩色视频,因此视频图像的特征信息可以作为运动目标检测判断依据[7]。不同彩色图像对应不同的颜色特征信息,导致颜色空间的选择成为影响前景检测性能的重要因素。
本文采用SOFM模型空间模型完成运动目标检测,如图1所示。
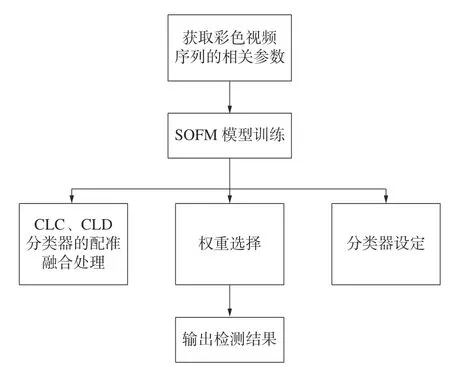
图1 目标检测流程
SOFM模型通过已有背景模型进行训练,像素值认为是样本,对前景模型目标进行判断[8]。若视频任意位置Y处的颜色值记为S,公式如下:


式中:α表示背景模型;β表示移动对象;θ表示约束参数。式(1)表示S与Y的概率关系,式(2)则是对相关参数进行定义。
此背景模型主要利用混合概率表示每一类像素对应的特征信息,完成任何颜色前景背景模型的创建,构建模型如式(3)及式(4)所示:
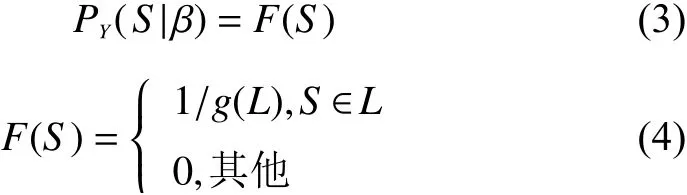
式中:L表示颜色总空间;g(L)表示L的三维卷积。从式(4)中可以看出,由于每一个神经元对应一组输入数据集,并且任意位置点的背景像素值与场景特征有关联。因此,利用概率自组织映射模型可以解决任意像素的背景颜色分布[9]:
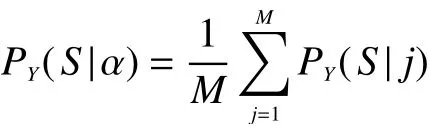
式中M代表SOFM模型的神经元个数。
假设神经元分布在一个矩阵空间里,则任何两个神经元K、G的欧氏距离记为

式中:l(K,G)代表神经元K、G之间的拓扑距离;TK、TG表示K、G在矩形空间里所处位置信息。
为减小算法的冗余度,可以把映射中的神经元作为一个高斯概率密度分布模型[10],如式(5)所示:
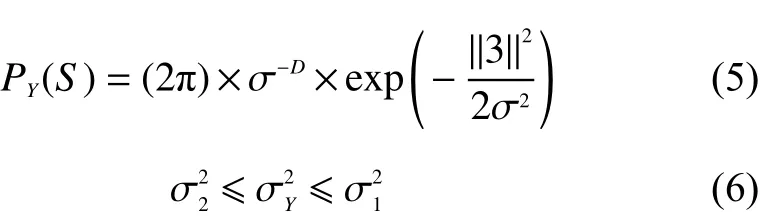
式中:σ2代表方差;σ1表示σ的上边界;σ2表示σ的下边界。式(6)的约束条件能够保证SOFM模型准确地描述输入像素的分布。
2 基于混合信息的运动目标检测
2.1 距离图像与彩色图像的配准
当获取视频场景的视频序列以后,得到视频序列的内外部参数,再对视频序列的距离图像信息和彩色图像信息进行融合配准处理,最终距离图像获取的分辨率与彩色图像获取的分辨率一致[11]。
2.2 运动目标检测
本文优化算法的流程图,如图2所示。
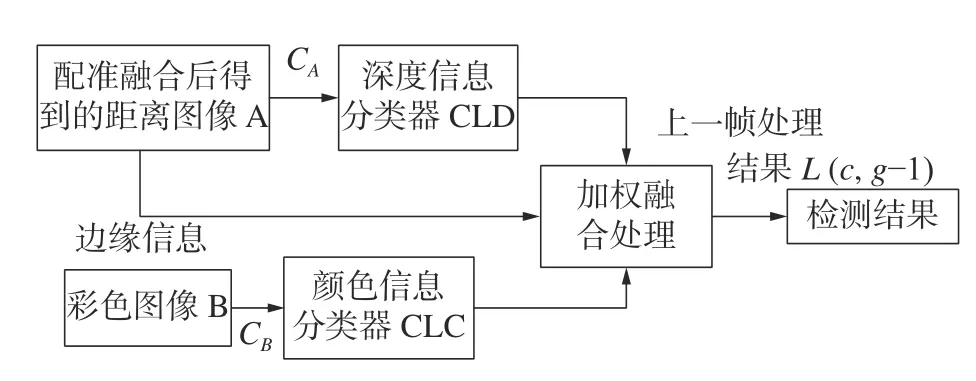
图2 基于混合信息的优化流程
在RGB色彩空间处理基础上,首先利用经配准融合处理的距离图像和彩图图像,构建像素级分类器CLC和CLD;其次,输入图像的像素c,将深度图像信息CA送至CLD分类器进行处理,颜色图像信息CB送至CLC分类器进行处理,二者输出的结果形成一个新的矩阵QC[3],如式(7)所示:

式中:q(wnc)|CA、q(wmc)|CA表示CLD分类器得到的像素c是背景模型q(wnc)、q(wmc) 的概率值;q(wnc)|CB、q(wmc)|CB表示CLC分类器得到的像素c是背景模型q(wnc)、q(wmc)的概率值[12]。由于图像每个区域间存在差异,因此,各个区域的颜色信息和深度信息对检测结果有着不同程度的影响[4]。故需要对分类器的输出值设定权重值Wj(j∈{A,B})。此时,像素c的概率值为q(wj|c),见式(8):

式中:q(wj|c)表示分类器像素c处的概率值;q(wj|cA)表示距离图像A对应的概率值;q(wj|cB)表示彩色图像B对应的概率值;wA、wB代表权重值。wA+wB=1,像素c属于较大q(wj|c)与之对应的wj类。
2.3 权重选取方案
配准融合处理的距离图像存在如下问题:1)由于视频中的场景信息不相同,导致配准融合处理过后的距离图像,出现信息缺失[13];2)由于图像自身存在较大的边缘噪声,进而导致边缘的信息误差值大[14]。针对以上存在的问题,结合颜色信息和深度信息对区域的差异影响,故选择一种权重值选取方案,操作流程如下所示:
1)对第g帧的像素c进行深度信息判断[15],当像素c获得深度信息时,执行步骤2);否则,采用颜色图像信息对运动目标进行检测,公式为
式中:wA(c,g)表示g时刻像素c获取的CLD分类器的图像信息值;wB(c,g)表示g时刻像素c获取的CLC分类器的图像信息值。此时,像素c未获取到深度信息。
2)选择Prewitt算子对像素c进行边缘区块检测处理,当像素c的梯度值F(s)大于阈值H时,则认为是边缘区域,跳转3);当像素c的梯度值F(s)小于阈值H时,则判定为中间区域;当像素c被判定为边缘区域时,跳转执行步骤4);
3)当深度信息受边缘噪声较大影响时,需要对权重值进行调整,以此减小边缘噪声影响,权重调整公式为
4)当运动目标逐渐向背景模型移动时,会导致CLD分类器出现漏检现象。故本文加入了视频上一帧的检测结果L(c,g-1)对权重值重新进行分配。
①当L(c,g-1)被判定为背景模型时,按照式(12)进行权重值选择:

②当L(c,g-1)被判定为运动目标时,则需要对第g-1帧的像素c存在的深度图像信息与CLD分类器的距离关系进行计算,公式为

式中:κ代表深度图像信息与CLD分类器的距离关系。若 κ(c,g−1)的值越大,代表像素c运动目标与背景模型的距离值越大;反之,若 κ(c,g−1)的值越小,代表像素c运动目标与背景模型的距离值越小。为防止运动目标靠近背景模型时出现漏检情况,需对wA的 值进行动态调整[15],即:wA伴 随 κ的增大而增大。本文利用广义逻辑函数对权重wA的值进行分配,权重wA的分配公式为

式中:B为常量,通常取值为0.5;Yc为样本值。
2.4 分类器设定
文章利用CLC分类器、CLD分类器,得到每一种分类器像素c的概率值q(wj|c)。假定运动目标概率值和背景模型概率值相同,依据贝叶斯公式[16],可将式(8)重新定义为
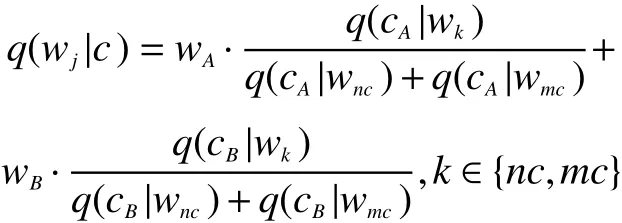
式 中,q(cA|wnc)、q(cA|wmc)表 示CLD分 类器 得到 的像 素c为 背 景 模 型R(wnc) 的 后 验 概 率 值;q(cB|wnc)、q(cB|wmc)表示CLC分类器得到的像素c为背景模型R(wmc)的后验概率值。
3 实验仿真的对比分析
本文实验采用TOF相机进行视频采集,分辨率为1 800×1 080。为验证本文改进算法的有效性,本文对运动目标与背景模型颜色类似、背景模型运动和光照突变3种不同类型的室内视频帧序列进行仿真。本文所有实验均采用MATLAB 2018b软件进行仿真分析。
3.1 实验参数的设定
本文算法受到诸多参数的限制影响,这些参数的设定值将会对算法产生影响,为保证算法在整体上获得良好性能优势,在结合大量实验数据的基础上对表1的参数值进行设定。
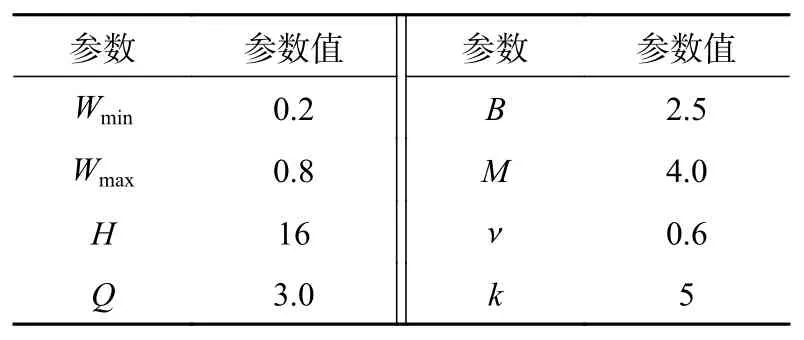
表1 算法参数的设定
3.2 运动目标与背景模型颜色类似
当运动目标与背景模型颜色相同时,序列1背景模型见图3(a)所示,图3(b)选择的盒子颜色与背景模型颜色相同。为保证实验结果的准确性,只保留图3(b)中的盒子部分,如图3(c)所示。在图4(a)中,采用CLC分类器进行目标检测,从图中明显看出,检测结果存在严重缺失;在图4(b)中,利用CLD分类器融合特征信息进行目标检测,检测的目标基本完整,但由于噪声点的影响,导致检测出的目标边缘不清晰;图4(c)采用本文改进算法进行目标检测,该算法检测效果最佳。与图4(d)手工检测结果对比,两者检测结果相近。
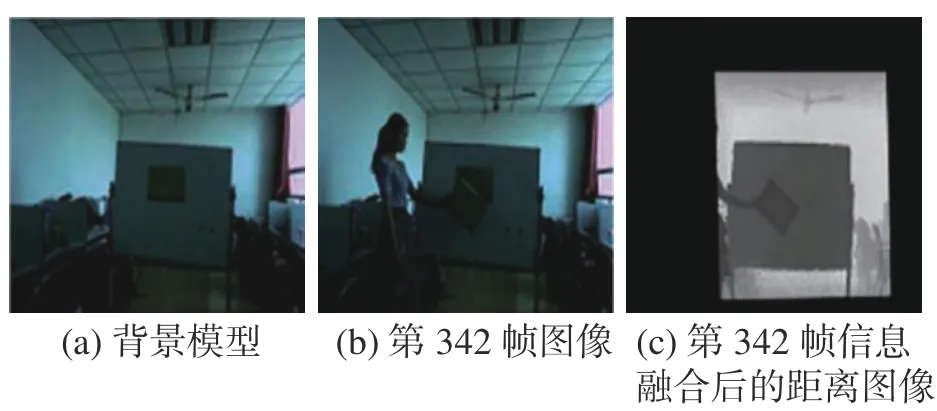
图3 序列1第342帧图像

图4 序列1检测结果
3.3 背景模型运动
若背景模型快速移动时,序列2的背景模型如图5(a)所示,在图5(b)中,第165帧图像背景模型开始运动,图5(c)为第342帧信息融合后的距离图像。图6(a)是采用CLC分类器对背景模型进行更新,此时,检测图中出现“鬼影”;图6(b)是采用CLD分类器依据本文提出的背景更新策略,对背景中移动物体进行判断,且有效克制了“鬼影”现象,但由于噪声点的影响,导致检测出的目标边缘不清晰;图6(c)采用改进算法进行目标检测,本文改进算法可以对运动的背景模型进行快速、准确判断,且有效消除了“鬼影”区域,检测效果最佳,与图6(d)手工检测结果基本相同。
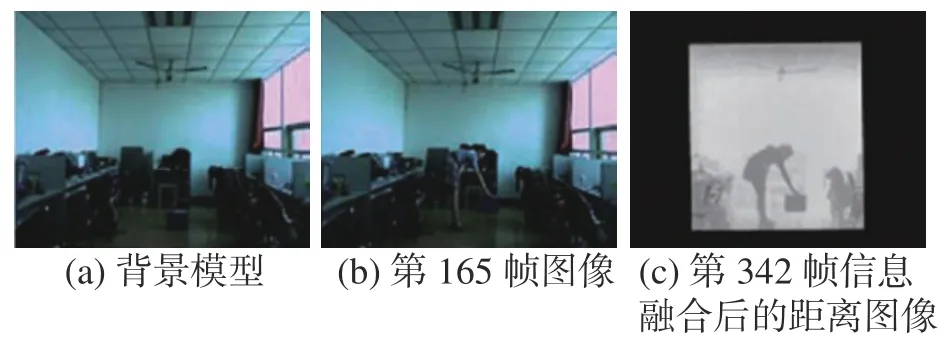
图5 序列2第165帧图像
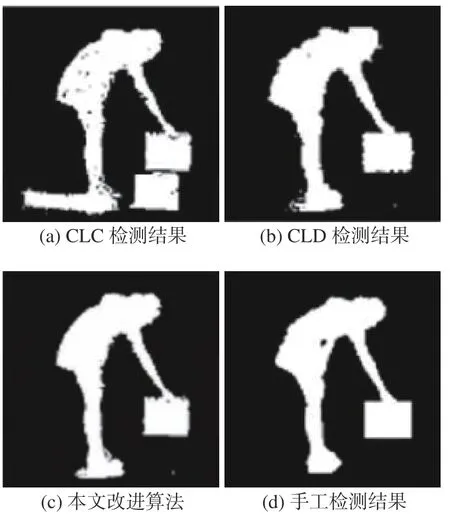
图6 序列2检测结果
3.4 光照突变
序列3为光照突变的视频序列,第769帧时光照突变。为保证实验结果的准确性,仍然对检测目标进行截取处理;为确保实验检测结果的一般性,在进行图像截取时,截取部分未进行特征信息融合处理。在图7的检测结果图中,图7(a)采用CLC分类器不能适应光照快速突变;图7(b)利用CLD分类器融合特征信息进行目标检测,检测的目标基本完整,但由于噪声点的影响,导致检测出的目标边缘不清晰;图7(c)采取的本文算法虽无法获取距离图像的完整信息,但受到光照突变的影响较小,与图7(d)的手工检测结果相对比,存在些许差异,但从整体来讲,本文算法可以有效抑制“鬼影”以及光照突变的情况。
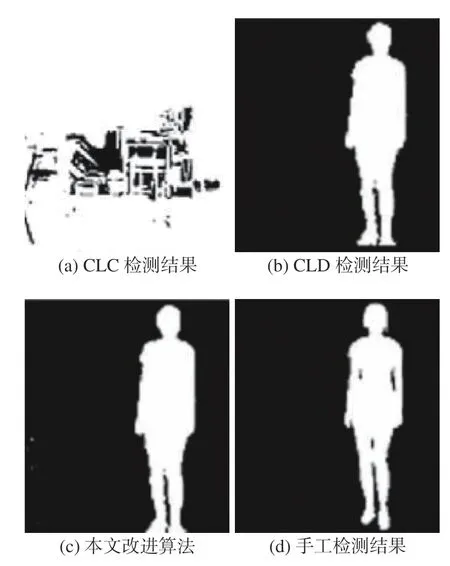
图7 序列3第769帧检测结果
3.5 实验结果的定量分析
为了更加准确地对3种算法进行评估分析,选定多个评价指标对其进行评估,评估参数主要包括召回率(Re)、精度(Pr)、F数,其中,召回率、F数、精度的值越大,说明算法的性能越好;计算公式为

式中:TP表示被成功检测为运动目标时的像素值;TN表示被成功检测为背景模型时的像素值;FN表示被错判为背景模型时的像素值;FP表示被错判为运动目标时的像素值;F数表示对Pr和Re两项指标进行综合评价,F数可以更加全面地对算法的性能进行综合评估。表2为几种算法的评估对比。
从表2数据可以看出,采用本文算法所得到的精度、召回率以及F数均为最优,验证了本文改进算法的可行性。
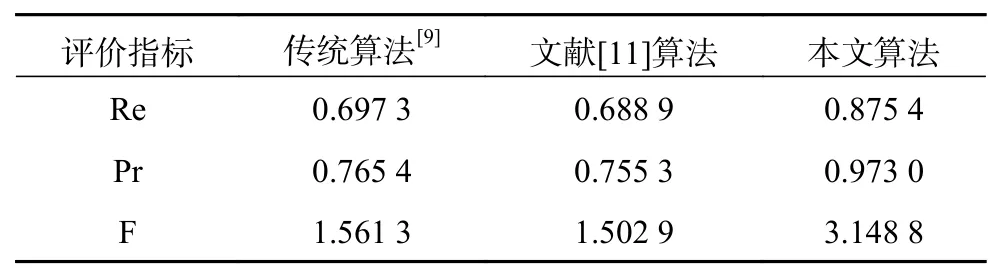
表2 3种算法的综合评估指标
4 结论
1)采用SOFM模型有效改善了色彩空间模型的真实性;
2)在SOFM模型基础上,利用CLC和CLD分类器进行检测,有效避免了光照突变、背景模型颜色相似、背景模型运动等问题;
3)通过对召回率、精度、F数的综合考评分析。本文采用算法的评价指标均为最优,进而验证了本文算法的可行性。
