吊舱推进装置操纵策略分析
2021-04-29康美泽李小军韩康汪春辉
康美泽,李小军,韩康,汪春辉
1. 中国舰船研究设计中心,湖北 武汉 430064
2. 哈尔滨工程大学 船舶工程学院,黑龙江 哈尔滨 150001
日臻完善的造船规范对新建船舶的性能有着愈来愈高的要求,同时日益精进的造船技术为船舶性能的提升提供了保障。尤其是吊舱推进装置的成功应用极大地提升了船舶的操纵性、安全性和经济性等性能,被广泛应用于LNG(liquefied natural gas)运输船、豪华邮轮和破冰船等对操纵性要求较高的船舶。
与桨舵操纵系统不同,吊舱推进装置能够在360°内水平转动以实现矢量推进并完成船舶操纵,无需桨舵配合,因而在操纵策略上,配有吊舱推进装置的船舶与常规推进器船舶有着很大的不同。近年来,国内外已有众多学者针对吊舱推进装置展开研究,Oosterveld等[1]将KA系列导管桨与吊舱推进装置组合并研究其水动力性能,Ball等[2]通过模型试验发现吊舱推进装置操纵过程中会导致水动力载荷剧增,Yakolev等[3]发现采用理论分析与经验公式结合的方法可以较为准确地评估吊舱推进装置的性能,Islam等[4-5]研究了舱体对边界层厚度和涡旋发展的影响,Ball等[6]在研究中给出了吊舱推进装置紧急制动和一般停靠下的操纵策略建议。张媛、韩阳等[7-8]对配有吊舱推进器的冰区船舶的操纵性特征进行了整理归纳。刘洪梅等[9]对比了传统推进器与吊舱推进器水动力性能差异。
对现有研究成果进行整理归纳可以发现:目前为止,大部分学术成果主要集中在吊舱推进器的性能分析预报,仅有少量文献研究了吊舱推进装置的操纵策略。为了深入掌握吊舱推进器的操纵特点,并为吊舱推进器的设计提供基本工况要求,本文从吊舱推进系统组成、水动力特性和操纵策略几个方面进行归纳和总结。
1 吊舱推进系统组成
应用吊舱推进装置,船舶需配备专门的电气系统,主要包括电力产生系统和电力分配系统,如图1所示,涉及发电机组、控制台、变压器和频率转换器等主要部件。

图1 吊舱推进电气系统
吊舱推进装置由多个子系统和部件组成,一般包括桨叶、电机和回转装置等结构,图2为典型的Mermaid吊舱推进装置示意图[10]。吊舱推进装置根据需要存在多种布局设计方式,如图3所示,可以适配多种类型的船舶。

图2 Mermaid吊舱结构
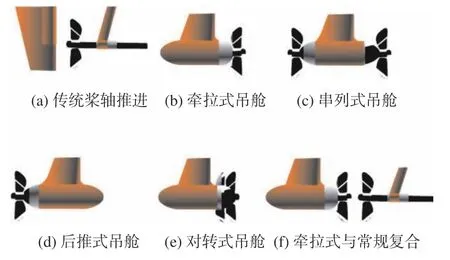
图3 吊舱推进布局方式
吊舱推进装置的操纵手柄一般可对吊舱主机转速和吊舱的方向进行同时控制,如图4(a)所示,并可通过操纵面板对操纵指令进行复查,如图4(b)所示,避免操纵指令错误。

图4 吊舱推进装置操纵台
2 转向操纵
2.1 吊舱推进装置性能变化
船舶以某一航速转向时,桨盘面处的来流攻角和速度都将会发生剧烈变化,并且导致配备双推进器的船舶左右两侧的吊舱推进装置产生的力和力矩不同,这种差异主要由两侧推进器在船舶转向时相对位置不同造成,与船体型线、艉鳍结构也有一定关系。图5为船艉右舷吊舱推进装置在船舶以恒定轴速转向时水动力性能变化的典型示意图,Kt为推力系数,Kq为扭矩系数,β为吊舱推进角度,转向左舷方向为负,右舷方向为正。船艉左舷推进装置性能变化依此类似[11]。

图5 吊舱定轴速转向性能变化
从图5中可以看出,在船舶转向时进行轴速控制是非常重要的,若保持轴速不变,当船舶向左转向时,右舷的吊舱推进装置会承受剧增的扭矩,可能导致吊舱主机过载而损坏,此外船舶的航速变化也会对吊舱推进装置的负荷产生影响,在航速变化时,轴速的改变会对吊舱主机的负荷产生更加剧烈的影响。
在船舶转向操纵过程中,吊舱推进装置的性能都会产生显著变化,图6为吊舱推进回转模型试验中典型的测量结果[12],T为推力,Q为扭矩,M为桨轴弯矩,ET为时间。从图6中可以看出,相对于转向之前记录的稳定数据而言,当船舶开始转向吊舱回转角度发生变化时,吊舱推进装置的力和力矩明显增加。类似的,在转向开始时,桨轴弯矩增加了某一数值但随后衰减到一定程度并在转向过程中保持稳定,而吊舱推进装置推力和扭矩没有衰减过程,在船舶转向过程中保持着数值增加后的状态,并在船舶回转后衰减到最初的数值,桨轴弯矩同样在回转后衰减到最初数值,但在衰减前经历了剧增过程。进行多次模型试验发现,在恒定轴速下进行船舶转向操纵,操纵后的推力和扭矩比操纵前分别高出约10%和50%,而桨轴弯矩的则可能是原来的5~6倍,在Z型操纵性试验中可以得到类似的结论。

图6 转向操纵吊舱推进性能
2.2 操纵策略
限于篇幅,本文重点论述双吊舱推进船舶转向右舷情况下的操纵策略(下同)。船舶转向时,吊舱推进装置有多种操纵方式[13],如图7所示。a种操纵情况下,左舷吊舱处于90°位置指向船外,右舷吊舱位于0°位置,两吊舱推进装置来流均为正向来流。在该操纵策略下,由于左舷吊舱进流受到船体和右舷吊舱舱体干扰的影响,左舷吊舱发出的横向力只能达到约80%的推力,而右舷纵向推力不受影响,显然不是最佳的操纵策略。进行b种操纵时,与a种操纵类似,左舷吊舱来流会受到船体和右舷吊舱舱体的影响,但同时由于左舷吊舱处于反向来流工况,对吊舱推力性能不利,只能达到满额推力的50%左右,右舷吊舱不受影响。在c种操纵策略下,左舷吊舱处于0°位置,右舷吊舱处于90°位置指向船体内侧,两吊舱均处于正向来流工况,该种操纵策略下,两吊舱来流受扰动较小,均能到达满额推力;d种操纵策略与c种操纵策略主要区别右舷吊舱指向船体外侧,受来流反向的影响,不能达到满额推力。综上,不考虑主机负荷问题,c种策略为较优操纵策略,船舶转向左舷时情况与之类似。

图7 右转向操纵
若寻求最大的转向效率,则需将2个吊舱推进装置都充分利用,在这种情况下船速下降明显。文献[13]通过研究发现当左舷推进为指向船外侧75°,右舷推进器为指向船体内测105°时,如图8所示(图中红绿色圆弧为操纵手柄,对应吊舱推进角度,下同),船舶能以较高的效率转向右舷,吊舱装置来流以及尾流受船体、艉鳍和舱体干扰较小,并且两吊舱推进装置在沿船体纵向产生的推力相互抵消,避免不必要的纵向推力。
3 减速控制
减速控制是船舶停泊靠岸或者两船靠近前的关键操纵环节,正常情况下,停泊操纵时的航速较低以给舵手留出足够的操纵时间和空间,进行减速操纵时需依据设备手册逐步进行合适的操纵,通常有3种主要减速手段:定推进角度变转速,定转速变推进角度以及变转速变推进角度。

图8 快速右转向操纵
进行定推进角度变转速操纵时,两吊舱推进装置都指向船体内侧,吊舱舱体自身会产生较大的刹车力使得船舶航速降低,根据操纵空间等限制推进角度通常在30°~90°,此种减速方法效率较高,无需反转螺旋桨,避免引起剧烈的空化振动和噪声。采用该种操纵策略时,两吊舱推进装置的角度及功率必须一致,以抵消彼此的转矩,保持航向稳定。通过控制螺旋桨转速可以控制船舶减速的程度,转速越高,减速越明显,如图9(a)所示。若因两船靠近进行减速操纵,例如领航船领航时,为减小螺旋桨尾流对领航船造成的干扰,两吊舱推进装置可均指向船体外侧,并进行相应的转速控制,如图9(b)所示。

图9 减速控制
进行定转速变推进角度操纵时,舵手需对两吊舱推进装置的推进角度进行控制,与前种操纵策略一致,只需控制一个操纵变量;而进行变转速变推进角度操纵时,舵手需同时控制转速和角度,对操纵者的操纵水平要求较高,但航速控制效率最高。
4 紧急制动
通常配备吊舱推进装置的船舶有2种紧急制动方式,一种为常规制动,直接将桨叶反向旋转;另一种为将舱体也作为刹车力的“外八字”制动方式,如图10所示。文献[9]研究发现进行常规制动时,桨轴的弯曲力矩的量级与自由运转状态下相同,但桨叶的推力和扭矩会在停车制动过程中剧烈变化,进行“外八字”制动时,轴向力和桨轴弯矩会显著增加,吊舱推进装置以25°位置进行定轴速制动时,桨轴载荷可达到自由运转状态下的11倍,如图11所示,Fr为傅汝德数,la为桨轴弯矩峰值与常规状态下弯矩的比值。

图10 紧急制动方式
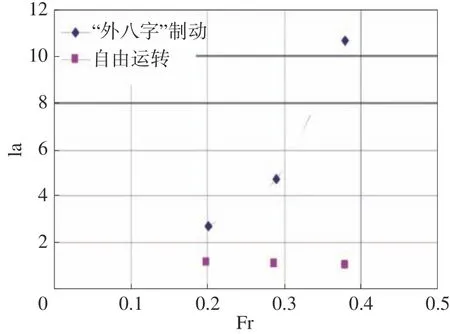
图11 制动载荷
常规制动操作简便,尽管多数吊舱推进装置可以反转螺旋桨,但反转螺旋桨不是理想化的制动方式,可能对桨轴密封和机械齿轮造成不利影响,在航速较高时可能导致主机过载并可能引起剧烈的空化、振动和噪声。同时,螺旋桨反转时不能发挥主机功率,推进效率低,并存在制动延迟和制动距离长等不足。经过实船实践发现一艘典型的游船在22 Kn时进行常规制动,制动距离约2 000~2 800 m,满足IMO关于15倍船长的制动标准[14-15]。
“外八字”制动时借助吊舱舱体形成的阻力,能够有效缩短制动距离,并在制动时船舶有较好的控制,对整个推进系统有较小的影响,较常规制动方式更不易引起空化,但对制动航速和吊舱角度有严格要求,否则容易导致吊舱推进装置发生磨损。为满足该种制动方式的使用限制,吊舱推进装置制造公司制定了相应的操纵流程。ABB设定15 Kn的制动航速限制,当航速大于15 Kn时逐步采用“外八字”制动,先将两吊舱转向船体外侧45°,直至航速降至15 Kn,再将吊舱推进装置转至180°位置。以上文的游船在相同航速工况下进行“外八字”制动,制动距离约1 100~1 500 m,制动距离较常规制动缩短明显。
5 结论
本文对双吊舱推进船舶的操纵策略进行整理归纳,结合实船操纵经验对船舶转向、减速和紧急制动下的操纵策略进行分析。进行右舷转向操纵时,左舷推进为指向船外侧75°,右舷推进器为指向船体内测105°时转向的效率最高。进行船舶减速操纵时,可以对吊舱推进角度和螺旋桨转速单独或者同时调整,不同操纵策略减速效果不同。船舶紧急制动时,“外八字”制动比常规制动方式效果更好。