基于粒子群布谷鸟融合算法的主汽温系统控制器参数优化
2021-04-27王瑾蔡迢阳任梦吕清
王瑾,蔡迢阳,任梦,吕清
(河北师范大学 工学院,河北 石家庄 050000)
经典比例-积分-微分控制器(PID)由于具有结构简单、鲁棒性强、参数少等优点,在工业控制领域得到广泛应用. 主汽温是火力发电厂热力系统中的重要参数,对机组的安全、经济运行有很大影响.目前,主汽温控制系统绝大多数采用串级PID控制策略,基于传统工程整定方法(Z-N法、稳定边界法等)得到的控制器参数往往并不能达到理想的控制效果,仍需要大量计算与实验才能应用到实际系统中.随着智能控制理论与计算机技术的发展,将智能控制理论与传统PID控制相结合成为了众多学者研究的方向,例如:韩璞等[1]提出了1种多包不确定离散系统的无记忆状态反馈H_∞鲁棒预测控制方法,将预测控制滚动优化与无记忆反馈结合在一起,提高了控制器的鲁棒性并减少了控制器优化参数的数量;牛海明等[2]采用多目标粒子群算法对自抗扰串级回路中的参数进行整定,具有较好的控制性能和抗干扰能力;刘帅等[3]利用帝国竞争算法对主汽温串级控制策略进行了仿真优化研究,得到了一种便捷有效的参数优化方法.同时,在引入智能控制算法的过程中,研究人员也对智能算法进行了改进,以得到更好的控制效果.粒子群算法(particle swarm optimization,PSO)[4]是一种基于群体智能的随机寻优方法,具有原理简单、参数较少、全局寻优等优点,但标准PSO算法在实际应用中也出现了算法早熟、易陷入局部最优等缺点. 为了提高算法的性能,研究人员提出了多种改进策略.周宏宇等[5]借助强化学习方法构建飞行器的协同需求与惯性权重间的动态映射网络,对粒子群算法进行了改进,得到了更好的动态规划效果.许胜才等[6]针对粒子群算法的拓扑结构与粒子变异进行了改进,为了提高粒子在前期搜索过程中的多样性,将星型拓扑结构与闭环拓扑结构进行结合,并能在后期保持整体收敛.高哲等[7]使用粒子群平均速度来表征粒子群的活跃程度,并将其作为粒子群惯性系数和学习因子调节的依据,提高了粒子群寻优速度,并改善了局部收敛的缺点.除了针对粒子群参数、拓扑结构进行改进,众多学者也尝试将多种算法进行融合,以改善单一智能算法的局限性.司文静等[8]将最小二乘支持向量机与自适应动态粒子群优化算法相结合,对高速公路交通量进行短期预测.布谷鸟搜索(cuckoo search, CS)算法作为一种较为新型的启发式搜索算法,与粒子群算法的融合与改进也得到了广泛研究与讨论[9-11]. 本文也将采用改进粒子群算法-布谷鸟算法的融合算法,对火电厂主汽温控制系统的控制参数进行优化.
1 融合智能算法原理
1.1 粒子群算法基本原理
粒子群算法是由Eberhart和Kennedy提出的一种智能寻优算法,该算法的原理:在维度为D的解空间中,存在包含n个粒子的粒子种群,每个粒子均为待优化问题的1个解,其状态可用位置向量和速度向量进行描述,向量Xi=(Xi1,Xi2,…,Xid)为粒子i当前的位置信息,向量Vi=(Vi1,Vi2,…,Vid)为粒子i当前的飞行速度,其中,1≤i≤n,1≤d≤D. 每个飞行粒子在目标空间中进行搜索时,会不断更新和记录粒子的个体最优位置pi=(pi1,pi2,…,pid)以及所在种群最优位置pg=(pg1,pg2,…,pgd),当算法开始运行时,对粒子的位置信息和飞行速度进行初始设置,利用以下公式对飞行粒子进行更新:
Vid(t+1)=ωVid(t)+c1r1(pid(t)-Xid(t))+c2r2(pgd(t)-Xid(t)),
(1)
Xid(t+1)=Xid(t)+Vid(t+1),
(2)
其中,ω为惯性权重,对粒子飞行速度进行状态更新,ω的大小对算法的全局搜索和局部搜索的比重有较大影响;c1和c2分别为认知因子与社会因子,分别表示粒子对自身和整个群体的认知,通常取c1=c2=2;r1和r2是[0,1]的随机数;粒子搜索的范围一般要在[Xmin,Xmax];粒子的最大飞行速度一般取Vmax=-Vmin=(Xmax-Xmin)/2.
粒子群算法具有较好的参数寻优能力,但传统粒子群算法中,粒子的飞行状态不完全受控,导致粒子无法跳出局部最优解的范围,算法得不到收敛,从而无法取得全局最优解.为此,通过引入动态惯性权重和布谷鸟算法对其进行优化,避免陷入局部最优,使其满足实际工程的要求.
1.2 布谷鸟搜索算法基本原理
CS算法是以布谷鸟寄巢产卵的特性以及少部分生物的Levy飞行模式为参照,由Yang等[12]在2009年提出.CS算法假定了3个理想规则:
规则1 布谷鸟每次产1个卵,在所有巢穴中随机选择1个进行孵化;
规则2 算法规定在随机选择的巢穴中,最不容易被发现寄生的巢穴为最佳巢穴,保留至下一代巢穴中.
规则3 布谷鸟寄生的巢穴数量是不变的,其寄生鸟蛋有一定概率Pa被发现,寄主可以移除鸟蛋或者放弃该巢穴.
每个鸟巢坐标位置与解空间中的解一一对应,在搜索过程中用新的解和可能更好的解来取代不太好的解. 在理想规则的基础上,CS算法利用Levy飞行进行全局随机行走,从而更新鸟巢位置
(3)

(4)
其中,
(5)

布谷鸟搜索算法也具有局部搜索和全局搜索2种搜索能力,且局部搜索非常密集,因此可以更高效地探索解空间,同时,Levy飞行遵循重尾概率,保证算法可以全局收敛.
1.3 融合智能算法
PSO算法的局部搜索能力较强且具有较好的收敛性,CS算法采用Levy飞行,因此具有较强的跳出局部搜索的能力,可以很好地弥补PSO算法的缺点.首先,通过PSO算法得到当前个体最佳位置pi和全局最佳位置pg,随后利用CS算法对个体位置进行搜索,计算对应的误差指标函数,将pi和pg进行比较以搜索对应的误差指标函数较小的位置,将新的解替换为更优的个体最佳位置pinew和pgnew,其算法步骤如下:
1)对粒子群进行初始化,种群规模为n,目标空间维度为N,迭代数最大为T,惯性权重区间为ω,学习因子为c1和c2;
2)计算粒子位置的误差指标函数J,用PSO算法更新个体最优解和全局最优解;
3)按照速度公式和位置公式进行迭代,更新粒子位置和飞行速度,按照迭代次数更新惯性权重值;
4)判断运行次数是否达到最大,若达到迭代极限则全局最优解,带入CS算法对个体最优位置进行更新,若没达到则转回2);
5)计算每个个体最优位置的误差指标函数;
6)得到新的个体最优位置和新的全局最优位置;
7)判断是否达到预期辨识精度,若没有则返回1),若达到则结束程序.
2 主汽温控制系统分析
2.1 主汽温控制策略
由于主汽温控制系统具有较大的迟延和惯性,单回路无法较好地实现对主汽温度的控制,目前火电厂广泛采用串级汽温控制或导前微分串级汽温控制.图1所示为主汽温串级控制系统模型结构,副回路中,G1(s)为导前区数学模型,PID1为副调节器,d为减温水外部扰动,输出量θ1为减温器出口温度,副回路的主要作用是快速消除导前区温度的扰动影响;主回路中,副回路为一个具有正作用的反馈闭合回路,G2(s)为惰性区数学模型,PID2为主控制器,通过对主汽温信号θ2进行细调,以保证主汽温度维持在合理范围内.

图1 主汽温串级控制系统模型结构Fig.1 Structure diagram of main steam temperature cascade control system
2.2 主汽温控制系统数学模型
主汽温控制系统中,由于过热器管道长度和蒸汽容积较大,当喷水减温流量存在干扰时,过热器出口蒸汽温度的动态特性也会发生明显变化,表1[14]所示为某超临界600 MW直流锅炉在不同典型负荷下主汽温对喷水扰动的动态特性.
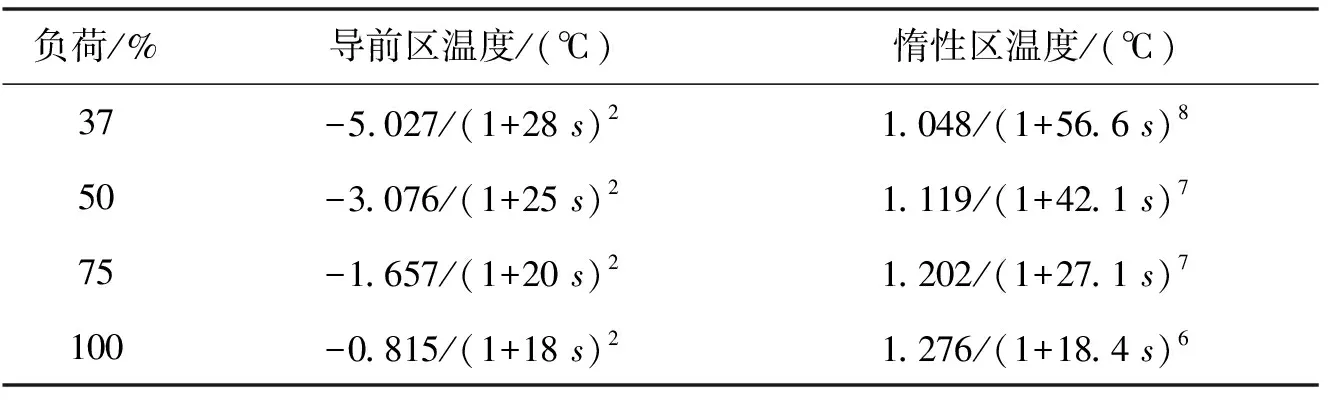
表1 600 MW直流锅炉主汽温动态特性
3 主汽温系统优化仿真实验
3.1 目标函数
3.1.1 概念及含义
目标函数是指用一个数是否达到最小值/最大值来衡量一个控制系统是否处于最佳状态,也被称为最佳性能指标泛函.针对不同的控制系统,建立一个更加切合实际的目标函数,对被控对象的调节品质有着重要意义,同时对优化的准确性和快速性也有较大影响,以下为常用的几种.

(6)
(7)

(8)
式(6)-式(8)中,e(t)为偏差,设定值r(t)和测量值y(t)的差值,即e(t)=r(t)-y(t);T为仿真时间.JITSE则可以抑制较大的误差波动,JITAE可以有效抑制长时间存在的误差,JIITAE是在JITAE指标的基础上,对系统初始偏差加强约束,放宽对稳态误差的要求,使系统更快达到稳态.ITSE为时间误差平方积分,ITAE为时间误差绝对积分,IITAE为改进时间误差绝对值积分.
3.1.2 仿真过程
假设主汽温控制系统在负荷75%处运行稳定,使用串级PID-PI控制方式,将3种目标函数作为误差指标函数进行粒子群优化计算,得到10次优化结果的平均值,优化结果见表2,将优化结果分别代入过热汽温串级PID控制系统仿真模型,可得到不同的控制效果,其性能指标结果见表3.

表2 ITSE、ITAE、IITAE优化结果

表3 基于ITSE、ITAE、IITAE优化结果的性能指标
其中,σ为超调量,Tr为上升时间,Ts为过渡时间,Tc为震荡周期(同向两波峰相隔的时间),“—”表示未观测出明显的第2个同向波峰.
根据以上3种评价指标得到的优化结果进行仿真,给设定值加入幅值为3的阶跃扰动,仿真2 500 s,在1 500 s处加入幅值为0.8、持续时间为50 s的外部扰动,得到系统的闭环输出曲线、减温水流量曲线如图2所示:

图2 系统闭环输出曲线(a)与减温水响应曲线(b)Fig.2 System closed-loop curve (a) and spraying water curve (b) under step disturbance
3.1.3 仿真结果分析
由仿真结果可知,以上3种目标函数都可以实现对串级PID参数的优化.从性能指标来看,ITSE和IITAE的上升时间较短,但超调量相对较大,过渡时间较长,且具有一定振荡,ITAE的上升时间相对较长,但其超调量最小,过渡时间较短,并且不存在明显振荡.从减温水流量变化来看,ITAE指标下的减温水流量变化更为平稳.因此,ITAE指标的优化结果适应性更强,更易于现场应用.
3.2 主汽温串级控制系统优化仿真
3.2.1 仿真方法与步骤
以75%负荷的主汽温动态特性为研究对象,采用PID串级控制方式,选用ITAE为目标函数,设定粒子数量为10,迭代10次.首先通过PSO算法得到一组最佳优化参数,将这组控制器参数作为初始值代入CS算法,设置初始巢穴数量为5,迭代50次,通过计算误差指标函数来确定新的最优控制参数.将PSO-CS融合算法计算出的优化参数与PSO算法、工程整定法得到的参数进行对比,结果见表4,在输入端加入幅值为3的阶跃扰动,观察3种控制参数下的闭环响应曲线,如图3.

表4 工程整定法、PSO算法、PSO-CS算法整定结果
3.2.2 仿真结果与分析
由3种PID参数整定方法得到的闭环输出响应曲线可知,它们均能实现对主汽温串级系统的控制:工程整定法通过计算公式和经验法得到的参数,响应时间较短,但是超调量较大,且振荡比较剧烈,稳定时间最长;PSO优化算法得到的参数,响应时间较长,但是超调量较小,且动态稳定性较好;PSO-CS优化算法得到的参数,响应时间较PSO算法较短,且超调量最小,稳定性最强.在实际工业应用中,PSO-CS优化算法具有更好的适应性和稳定性.
4 结论
使用粒子群算法与布谷鸟算法的融合算法对某600 MW火电机组的主汽温控制系统进行优化.利用粒子群算法研究并确定了主汽温控制系统的误差目标函数,阐述了主汽温系统的串级PID控制原理,并采用融合算法、粒子群算法、工程整定法进行了仿真,仿真结果证实了ITAE指标作为主汽温控制系统的目标函数简单有效;粒子群布谷鸟融合算法的优化效果与粒子群算法与工程整定法相比,具有更好的动态性能和适应性,改善了粒子群算法局部收敛的特性.
