距离相关噪声AOA协同定位下无人机路径优化方法
2021-04-25刘雪娇彭冬亮
左 燕 刘雪娇 彭冬亮
(杭州电子科技大学自动化学院 杭州 310018)
1 引言
随着隐身飞机、反辐射导弹和电子对抗等技术发展,无源探测系统具有不主动发射电磁信号、隐蔽性好、覆盖范围广等优点[1],已广泛应用于目标跟踪、监视、导航和无线通信等领域。
在无源探测系统中,角度信息(Angel Of Arrival,AOA)是基本的观测信息之一。基于AOA的定位跟踪算法相继提出,包括极大似然估计(ML)[2]、最小二乘估计(LS)[3]、伪线性估计(PLE)[4]、扩展卡尔曼滤波(EKF)[5]等。大量研究结果表明:AOA定位性能不仅取决于传感器量测精度,还与目标-传感器的几何位置有关[6]。当测角传感器(如红外传感器、光电设备、无源雷达)部署在多个无人机上,通过优化无人机(Unmanned Aerial Vehicles, UAV)位置可以进一步提高AOA协同定位性能[7],AOA协同定位下无人机路径规划成为研究热点。
针对AOA协同定位问题,基于最大化FIM行列式指标(D准则)的最优几何分析[6]和UAV最优路径规划[7,8]相继提出。由于D准则可能导致大的估计偏差[8],基于最小化CRLB的迹指标(A准则)下UAV路径规划随之提出[9,10],通过非线性规划优化算法[11]在线计算满足各种状态约束和环境约束条件的UVA的轨迹,使跟踪目标状态估计接近CRLB。为满足无人机实时在线计算,参数化路径优化算法[12]被提出,该算法基于信息增益离线计算一组传感器-目标最优构型集合,在线选择最优UAV航迹,该方法只适合单个UAV。文献[13]采用归一化梯度算法计算UAV最优航迹,易陷入局部最优。
上述AOA协同定位问题假设量测噪声方差为常数,而理论[14]和实验[15]研究显示AOA量测噪声方差是距离的函数。文献[16]提出了一种联合最小二乘和非线性渐消滤波算法(LS-ISFEKF)。文献[17]基于广义CRLB(Generalized CRLB, GCRLB)[14]的迹最小化指标分析无约束下距离相关噪声AOA协同定位最优几何结构。文献[18]提出了一种距离相关噪声AOA协同定位下基于演化神经网络的UAV路径规划。不同于上述研究工作,本文主要创新工作如下:(1)提出了一种联合极大似然估计和变增益UKF滤波的定位跟踪算法,适应量测噪声方差随距离的变化;(2)基于GCRLB的迹最小化指标,分析了距离和角度约束下最优传感器几何构型;(3)考虑距离相关噪声特征,以最小化GCRLB的迹为目标函数,建立多约束UAV路径规划模型,结合罚函数和LM算法优化求解,兼顾性能和效率。
2 距离相关噪声AOA协同定位
在实际应用中测角传感器装载在多个UAV上,通过控制UAV运动方向使得传感器到达最佳探测位置,从而获得对目标更加精确的量测信息,减小定位误差。在传统UAV路径规划框架[7]的基础上,设计了距离相关噪声AOA协同定位方法总体框架(见图1)。给定距离相关噪声AOA量测,利用ML和变增益UKF获得目标状态的估计值,计算距离相关噪声AOA协同定位GCRLB指标。以GCRLB迹最小化为目标函数,建立多约束路径规划模型,结合罚函数和LM算法优化求解得到UAV的最优航向角,控制UAV运动到最优航路点。
2.1 距离相关噪声量测模型
2维空间下M个测角传感器分别部署在M个UAV上对目标定位。令目标位置Star=[xtar,ytar]T,速度传感器i的 位置Si=[xi,yi]T,速度则传感器i获得角度量测值
其中, θi为传感器i测 量的方位角,且- π <θi≤π。ni为 加性量测噪声,服从零均值,方差为高斯分布,即ni∼N(0,)。
在实际应用中,传感器方位角量测噪声方差与信号的信噪比SNR有关[14]。当传感器工作参数相同时,SNR仅取决于传感器和目标的距离,传感器i的量测噪声方差可以描述为[15]

图1 距离相关噪声AOA协同定位框架

2.2 目标运动模型

其中,Fk为 状态转移矩阵;ek为目标运动噪声,服从 均值为零,协方差为Q 的高斯分布。
2.3 ML-VUKF算法
考虑AOA量测噪声方差随目标-传感器距离变化特点,设计一种联合ML估计和变增益UKF算法(记为ML-VUKF算法),具体如下:
(1) 初始值:采用ML估计算法[2]确定目标初始状态X ¯k|k。
(2) 生成Sigma点εnk及其权重wn

其中, N 为Sigma点的维数;λ 为标度参数,它确定围绕状态向量Xk均值的Sigma点的分布。
(3) 预测:计算Sigma点的一步预测,及相应量测预测值。

(4) 计算增益:根据目标一步预测值更新量测噪声方差,以此更新滤波器增益。


式(10)和式(11)中, R˜r为距离相关量测噪声方差。由于目标非合作,用目标一步预测值X ¯k+1|k代替目标位置真实值,计算 R˜r。利用式(12)计算增益,该值是目标-传感器距离的隐函数。
(4) 状态更新:根据新的量测更新目标状态和状态协方差。

3 GCRLB指标下最优传感器位置分析
3.1 GCRLB性能指标
考虑量测噪声与距离相关的特点,采用广义CRLB指标(GCRLB)[14],以GCRLB的迹最小化为指标进行传感器和目标最优几何分布构型。
在高斯噪声假设下,距离相关量测噪声下AOA目标定位FIM为[14]

其中,

FIM的行列式为

GCRLB定义为FIM的逆[14]

GCRLB的迹为

3.2 无约束最优传感器位置分析
以GCRLB的迹最小化为定位性能指标,分析传感器-目标的最佳位置。将 A, B1和 B2具体形式代入式(24),展开可得

式中,φij=θj-θi为 传感器i和 传感器j 的夹角。
(1) 给定任意距离 ri, 分析传感器最佳角度φij。最小化GCRLB的迹等价于优化问题

取sin 2φij=0,j /=i,i=1,2,···,M时,最 优 角度与距离 ri无 关,最优交会角为φij=±π/2(j /=i)。
(2) 给定任意角度 φij, 分析传感器i最佳距离ri。 将ai, bi, ci, di具体形式代入式(25)可得

上述函数f2(ri)随 着距离ri的减小而减小,因此固 定传感器之间夹角,传感器距目标越近越好。
3.3 约束最优传感器位置分析
考虑传感器最小探测安全距离约束以及UAV运动平台运动角度约束,分析角度约束和距离约束条件下传感器最优几何位置。



求导得到最优性条件

最优交会角为φij=π/M, GCRLB的迹最优值为

(1) 当π /2 ≤θmax-θmin≤2π时,最优性条件

(2) 当 π/M ≤θmax-θmin≤π/2 时, M个传感器最优分布满足式(33)的条件

(3) 当0 ≤θmax-θmin≤π/M时,对非线性目标函数(式(31))在区间[ θmin,θmax]进行梯度下降搜索[17]可 得最优传感器位置数值解。
4 AOA协同定位下UAV路径优化
在文献[7]的基础上,针对距离相关噪声特性,以GCRLB的迹最小化[14,18]为目标函数,考虑UAV运行过程中运动约束、通信和避碰约束、探测约束等,建立多约束AOA协同定位UAV路径规划模型。

其中, v 为UAV飞行速度,φi(k) 为 第i个UAV的航向角,φ (k)=[φ1(k),φ2(k),···,φM(k)]T; φmax为最大允许转弯率, rdmax为UAV对目标的最大安全探测距离,rsmax和rsmin分别为UAV之间最大安全避碰距离和最小通信距离;式(34)为目标函数;式(35)为UAV运动模型;式(36)为UAV转弯率限制;式(37)为UAV对目标最大安全探测距离约束;式(38)和式(39)分别为UAV之间最小通信约束和最大安全避碰约束。
该问题是带约束的非线性优化问题,通过构造罚函数将上述问题转化为如下无约束优化问题

无约束优化问题(式(40))可以采用梯度下降法[13]或牛顿法[7]迭代求解。牛顿法收敛快,但黑塞矩阵的逆求解时间复杂度高。梯度下降法时间复杂度低,但收敛速度慢,易陷入局部极小。本文采用LM算法[19],它是梯度下降法和高斯牛顿法的自适应结合,当解远离最优值时梯度下降,在最优解邻域时快速收敛,满足动态场景的实时性。
5 仿真实验
仿真场景设置如下[7]:3个可移动传感器对1个目标进行定位。目标位置[10000, 3000] m,采样间隔T = 1 s。3个传感器分别装载在3个UAV平台。UAV1的初始位置为[1000, 1000] m, UAV2的初始位置为[2000, 0] m, UAV3的初始位置为[1000,-1000] m。3个UAV的运动速度均为40 m/s。UAV最大允许转弯率φmax=4°,UAV对目标的最大安全探测距离rdmax为20 km,UAV之间最大安全避碰距离rsmax为 7500 m,最小通信距离rsmin为200 m。所有UAV上部署精度相同测角传感器。考虑传感器测角量测噪声服从零均值高斯分布,且量测方差距离相关。3个传感器参考距离 r0为1500 m,参考距离对应的信噪比 SNR0为30 dB,路径损耗系数α为0.01。
首先,比较不同AOA定位跟踪算法。将本文所提ML-VUKF与ML-MEKF[5]和LS-ISFEKF[16]算法进行比较,蒙特卡洛次数为1000,图2给出不同定位跟踪算法下目标状态估计误差MSE比较曲线。
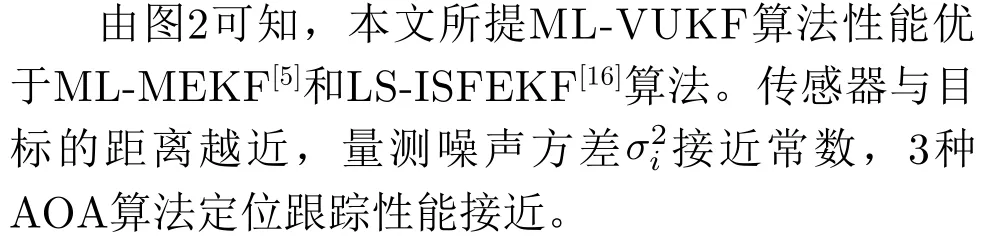
其次,研究相同精度测角传感器AOA协同定位下路径优化性能。将本文所提基于GCRLB的路径优化算法(记为本文算法)与基于CRLB的路径优化算法[7](记为优化算法[7])和常规直线轨迹飞行策略(记为直线轨迹)进行比较,图3至图5分别给出3种UAV路径优化算法下UAV飞行航迹,图6给出3种UAV路径优化算法下定位误差MSE比较曲线。


图2 不同AOA跟踪算法下估计误差MSE

图3 直线飞行策略下UAV飞行航迹

图4 优化算法[7]下UAV飞行航迹


图5 本文算法下UAV飞行航迹
图6 不同算法下定位误差MSE
图7给出不同传感器个数下定位误差MSE比较曲线,随着传感器个数的增加目标定位误差MSE减小。对多个同类传感器组网,增加传感器个数有望提升目标定位精度。
最后,研究不同精度测角传感器AOA协同定位下路径优化性能。考虑不同精度的测角传感器,UAV1, UAV2和UAV3上部署的测角传感器在参考距离下的量测方差分别为 1°, 0 .8°和0 .1°。图8给出不同量测精度下AOA协同定位UAV下飞行航迹。将其余相同精度(均为 1°)测角传感器AOA协同定位下UAV飞行轨迹(见图5)比较,传感器测角精度 影响最佳传感器位置分布。
6 结束语

图7 不同传感器个数下定位误差MSE

图8 不同测角精度传感器协同定位下UAV飞行航迹
本文研究距离相关噪声AOA协同定位下UAV路径优化问题。首先针对AOA量测噪声方差随距离变化的特性,设计了一种ML-VUKF估计算法对目标定位。其次,基于GCRLB的迹最小指标分别分析了无约束和距离/角度约束条件下无人机和目标最优几何分布构型。最后,考虑UAV运行中实际约束建立UAV路径规划模型,并采用基于罚函数和LM算法优化求解。通过定位算法的改进和UAV路径优化,提高距离相关噪声AOA协同定位性能。理论分析和仿真结果显示:
(1) 给出了角度和距离约束下最优传感器位置分布:传感器和目标的最优距离为允许的最短距离rmin;当角度约束θmax-θmin≥π/M 时, M个传感器的最优交会角为 π/2 ;若θmax-θmin<π/M,则采用迭代下降搜索算法在区间[ θmin,θmax]进行梯度下降搜索找到传感器最优位置数值解。
(2) 基于GCRLB迹最小化指标UAV路径优化策略下AOA定位性能优于基于CRLB迹最小化指标下路径优化算法[7]。传感器与目标的距离越近,量测噪声方差接近固定值,两者算法定位性能接近。传感器的个数增加可以提高AOA定位精度。
本文提出基于GCRLB的UAV路径优化问题为单步决策。考虑当前决策对长期定位性能的影响,开展基于GCRLB的多步决策下路径优化问题是下一步需要研究的工作。
