基于功率动态分配的自动驾驶机车牵引电机节能控制
2021-04-23李学明徐绍龙蒋奉兵褚金鹏
李学明, 徐绍龙, 蒋奉兵, 褚金鹏
(株洲中车时代电气股份有限公司,湖南 株洲 412001)
0 引 言
列车自动驾驶技术作为轨道交通智能化的重要前沿技术之一,已在行业内得到充分关注和应用[1]。上海轨道交通10号线、北京燕房线等率先实现了城市轨道交通领域的列车全自动驾驶;广东惠莞线和京张高铁线分别建成了中国列车运行控制系统-2级(CTCS2)+列车自动运行系统(ATO)的干线城际铁路和基于CTCS3+ATO的高速铁路自动驾驶试验[2]。由中车株洲所研发的HXD1 型机车自动驾驶系统已累计安全运行27万多公里[3]。随着轨道交通装备智能化程度的提高,客户对设备运营的安全可靠、平稳、正点、节能、经济、高效等方面提出了更高的要求[4]。
机车特别是大功率机车,其单轴牵引电机额定功率一般超过1 000 kW,机车能耗绝大部分为牵引能耗,而牵引电机额定功率运行时的效率一般在0.90~0.95之间,在额定功率以下运行时则效率更低,且在同一速度下不同牵引力发挥时其效率相差较大。目前关于电机节能控制方法研究较多,主要有基于电机损耗模型的最优控制[5-10],降压节电控制[11],搜索控制[12]、恒功率因数控制[13]、最小励磁电流控制[14]等。
综上所述,通常以单台电机为考虑对象,通过建立电机损耗模型或与损耗强相关的控制量,从而调整实时控制策略,实现当前工况下电机损耗优化控制。此类方法需对电机损耗模型进行深入研究并对成熟控制策略进行大量调整优化,工程实现较复杂。为此,本文考虑从整车系统出发,基于HXD1自动驾驶机车自动驾驶装置的规划信息,提出了一种基于牵引功率动态分配的机车牵引电机节能控制方法。根据牵引吨位、线路约束的牵引功率需求等约束,实时计算未来规划区间内的功率需求,基于牵引电机效率最优进行各轴牵引力动态分配,在保证安全运用的条件下,实现牵引电机能耗最低。
1 机车牵引传动系统及其牵引力分配控制原理
1.1 机车牵引传动系统介绍
交流传动电力机车牵引传动系统典型主电路结构原理如图1所示。主要由牵引变压器、牵引变流器(包括充电回路、四象限整流器、中间直流环节、逆变器等)和牵引电机3部分组成。单相25 kV交流电经过受电弓、真空断路器VCB和牵引变压器一次侧进入车体,由牵引变压器二次侧绕组向变流电路提供单相交流电。交流电流在四象限整流器的作用下变换成脉动直流电,经中间直流环节滤波后,利用逆变器转换成频率和幅值可变的三相交流电驱动牵引电机,从而控制机车以不同速度和牵引力前进。以HXD1机车为例,其机车轴式为2(B0-B0),整个机车由2节完全相同的4轴电力机车通过固定重联方式构成。每节机车配置1台牵引变压器、1台变流器和4台牵引电机,每个牵引变流器配置1个传动控制单元(TCU)[15],实现牵引传动系统的实时控制、诊断与保护及网络通信等功能。

图1 机车牵引传动系统典型主电路结构原理
1.2 牵引力分配控制原理
HXD1型自动驾驶机车每节机车配置一套自动驾驶装置ATO[3],通过接收来自列车运行监控装置、网络中央控制单元(CCU)、制动控制单元及机车电台的数据,基于自动驾驶控制策略实现对机车牵引系统、制动系统的控制,最终实现机车的自动驾驶功能[4]。
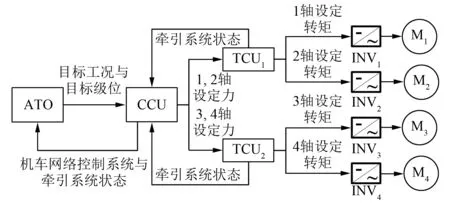
图2 机车牵引制动力分配控制流程
机车的牵引制动力分配控制流程如图2所示。ATO装置结合列车运行线路数据、车辆数据、监控信号及机车牵引/制动特性,对列车运行行程进行评估,基于安全、平稳、正点、减负及节能等原则,自动规划机车在前方区间的最优化目标速度曲线和整车牵引制动力设定曲线,并以目标工况(牵引或制动)和目标级位(对应手柄级位)的形式发送给CCU装置。CCU收到该信息后,结合目标工况,将级位信息进行转换成整车牵引制动力,并按各轴平均分配的方式将整车力分解成每轴牵引制动力,通过多功能车辆总线(MVB)通信方式发送给该节机车对应的2个TCU。TCU收到每轴设定力后,根据机车传动比和轮径信息将设定力转换成对应的设定转矩,并通过控制本轴牵引逆变器(INV)IGBT脉冲,驱动牵引电机实现设定转矩的实时闭环控制。
2 牵引电机节能控制策略
2.1 算法基本原理
本文提出的基于功率动态分配的自动驾驶机车牵引电机节能控制算法如图3所示。

图3 基于功率动态分配的机车牵引电机节能控制算法流程图
整个算法分成离线设计与在线实现2部分。离线设计阶段,通过深入分析大量机车历史现场运用数据,基于数据驱动方法,建立牵引电机效率与牵引力、速度间的关系模型并确定评价策略优劣的性能指标。其中,性能指标综合考虑节能效果和各轴牵引力的均衡程度,采用带等式约束的多目标优化函数作为其评价指标,各目标间的权重系数根据用户需求可自定义。在线实现阶段,在每个运行区间初始位置,首先,读取区间规划的整车牵引力及速度曲线,根据策略序号计算每种牵引力分配策略下的规划牵引力和速度曲线。其次,基于离线设计得到的牵引电机效率模型以及性能指标计算式,计算各种牵引力分配策略下的指标值。最后,选定使目标函数最小的策略,并根据对应策略序号输出相应策略下的各轴牵引力进行牵引电机控制。下文对算法中涉及的各功能单元设计原理进行了详细阐述。
2.2 电机效率建模
基于历史正常工况下运行数据中记录的一次侧电压、一次侧电流、机车牵引力、机车速度等信息,估算机车效率与牵引力、速度间的关系,效率随牵引力和速度的分布三维图如图4所示。
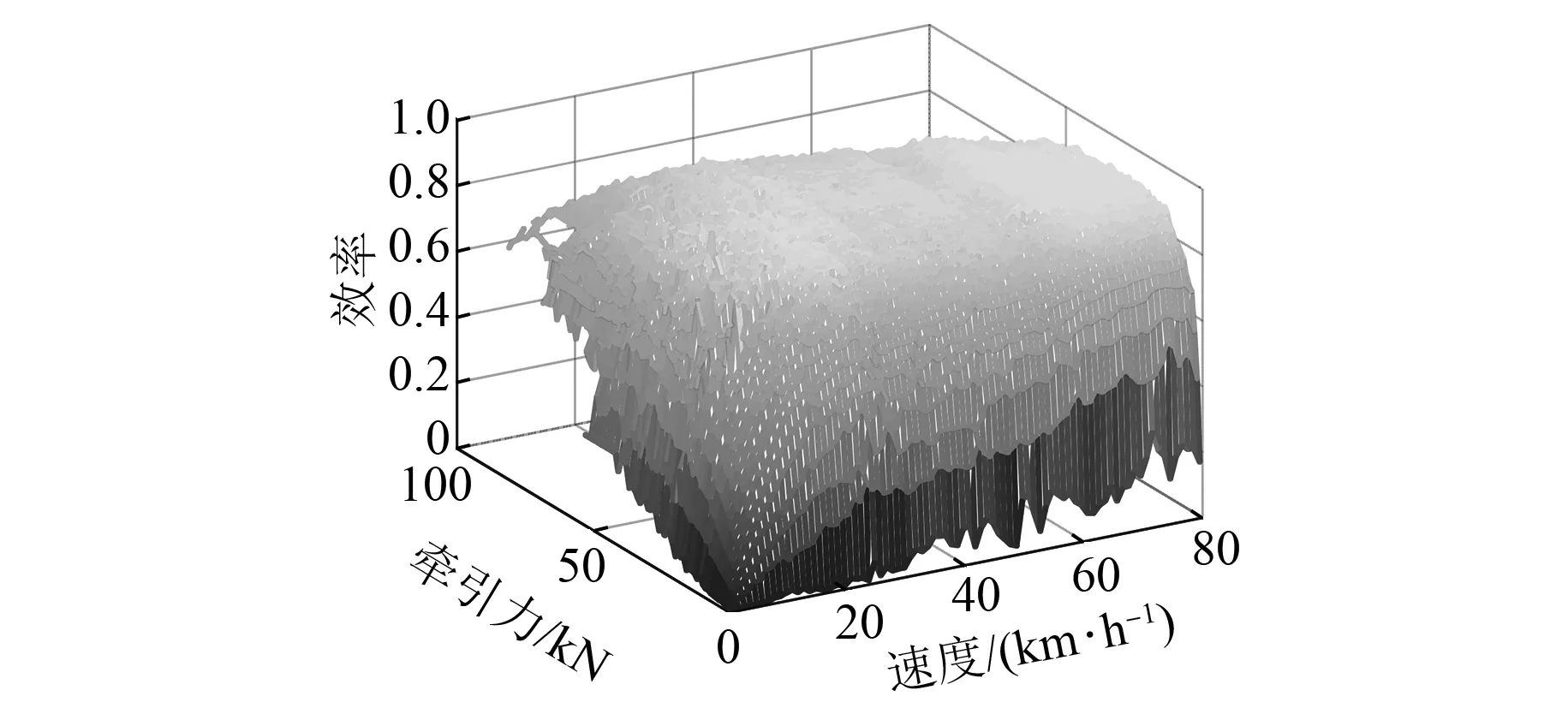
图4 牵引电机“牵引力-速度-效率”三维图
分析图4可知,同一速度下不同牵引力发挥时效率相差较大,且效率与发挥牵引力不是单调线性关系,基于数据对其函数关系式以1 km/h为步长进行分段五阶多项式拟合,拟合式如下:
η=a0(n)·F5+a1(n)·F4+a2(n)·F3+a3(n)·F2+a4(n)·F1+a5(n)
(1)
可得不同速度条件下全牵引力范围的效率关系式:
η=fη(F,v)
(2)
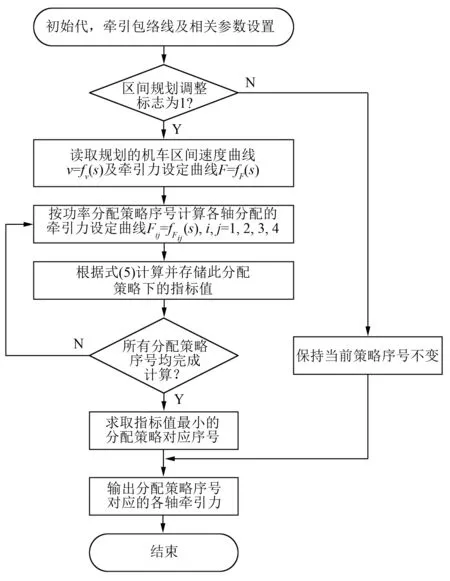
式中:a0~a5为多项式函数中的拟合系数;n为第n个速度段,如第1个速度段包括的速度范围v1为0 km/h≤v1<1 km/h,第n个速度段包括的速度范围vn为(n-1) km/h≤vn 不同速度区间分段拟合的均方误差如图5所示。 图5 拟合误差结果 由图5可以看出,最大拟合误差为0.066 5,平均误差为0.042 6,满足优化目标精度要求。 假设规划的区间长度为SN,则区间规划的速度、牵引力曲线分别为 v=fv(s),0 (3) F=fF(s),0 (4) 各轴牵引力发挥存在较大偏差时会对列车平稳性等控制性能产生一定影响,因此为了兼固效率同时尽可能均衡各轴牵引力发挥,有效衡量牵引力分配好坏,构造如下优化指标,求解最优化问题求取各轴最佳分配牵引力曲线: minJ=k1·Jη+k2·JB (5) 在现有的电力机车自动驾驶牵引力分配中,通常采用均衡分配策略(表1中TS1),原因是此种分配策略实现最为简单。为了在考虑工程实现方便的同时具备良好的节能效果,本文综合单轴牵引电机效率最优曲线以及惰行方案,增加TS2~TS4 3种分配策略,如表1所示。其中,分配策略TS3和TS4中惰行牵引电机数目根据本区间最大功率需求来确定。3种牵引力分配策略均具有工程实现简单,物理意义清晰等优点。同时,为了在满足节能效果的同时避免频繁进行牵引力分配策略切换,考虑在同一个规划区间只采用一种分配策略,通过对整条线路上每个规划区间内均选择使能耗最小的策略来保证整条线路内节能效果最佳。 表1 分配策略列表 整个机车牵引电机节能控制算法在线计算流程如图6所示。 图6 牵引电机节能控制算法在线计算流程图 在进行初始化以及相关参数设置完成后,首先基于机车当前位移对其区间位置进行实时判断,当处于规划区间起始位置时,置区间规划调整标志为1并开始进行分配策略计算,否则保持当前分配策略不变。然后,当区间规划调整标志为1时,读取当前规划区间速度及牵引力规划曲线,并根据式(5)计算4种分配策略对应的指标值。最后,求取指标值最小的分配策略对应的各轴牵引力作为牵引电机的给定输出。图6中,Fij表示第i种分配策略下的第j轴牵引力设定曲线。牵引力分配计算举例说明:以HXD1机车为例,该车每个自动驾驶装置负责4个轴牵引力控制。假设某时刻整节车设定牵引力FT要求为150 kN,此速度下根据电机特性曲线求得的单轴最大允许发挥牵引力Fmax为60 kN,则根据表1,不同策略下各轴发挥牵引力计算如表2所示。 表2 机车功率分配策略数值算例 根据HXD1机车记录的某趟两站点间实际线路自动驾驶运行数据,对上述牵引力分配控制策略的节能效果进行验证。性能指标函数中,k1与k2分别取1.0和0.2。 整个线路的区间序号以及整车规划牵引力和速度如图7和图8所示。由图7、图8可知,此趟线路长度共约56 km,整个运行线路包括8个规划区间,即在此线路上需根据优化指标式(5)对分配策略进行8次自动规划;机车运行速度在0~80 km/h间动态变化,整车规划牵引力在0~465 kN之间波动。 图7 区间序号及速度对应图 图8 整趟线路区间规划整车牵引力及速度 不同策略下各轴分配牵引如图9所示。从图9可以看出,采用策略1时,其各轴牵引力均相等,策略2的1轴牵引力最大,策略3的4轴惰行工况最多且1轴牵引力最大,策略4的4轴惰行工况最多且1,2轴牵引力发挥较均衡,与表1中对应分配策略相符。 图9 不同策略下各轴分配牵引力 各分配策略节能控制结果如图10所示。从图10可以看出,此趟线路的8个规划区间,不同分配策略节能效果不尽相同。其中,区间3、4、5采用策略TS2能达到最优节能效果,其余区间采用策略TS3节能效果最佳,而采用分配策略TS1能耗均最大。 图10 各分配策略节能控制结果 不同策略下各区间能耗详细数据如表3所示。从表3可以得出,所有区间若只采用单一的牵引力分配策略,则4种分配策略的能耗分别为3 415.7、2 836.3、2 411.6、2 876.7 kW·h,比目前采用策略1的分配策略,约节能了29.4%。 表3 不同策略下各区间能耗详细数据 kW·h 本文从整车牵引功率动态分配角度出发,提出了一种自动驾驶机车牵引电机节能控制策略。现场运行数据测试表明,与目前所用控制方法相比,本文所提动态功率分配策略,约节能了29.4%。此外,该方法无需改造现有牵引系统硬件,仅需升级相关软件,工程实现简单,具有良好的应用前景。
2.3 性能指标设计


2.4 牵引力分配策略设计


3 算法现场数据验证





4 结 语
