基于谐波抑制的共母线开绕组永磁同步电机减振控制*
2021-04-23赵文祥吉敬华朱生道
王 恒, 赵文祥, 吉敬华, 朱生道
(江苏大学 电气信息工程学院,江苏 镇江 212013)
0 引 言
开绕组永磁同步电机(OW-PMSM)在传统PMSM基础上将绕组中性点打开,由双逆变器组共同驱动,控制灵活、母线电压利用率高且具有一定的容错性能[1]。根据电源端供电情况,OW-PMSM驱动拓扑结构有共直流母线、隔离直流母线与隔离母线飞跨电容[2]。其中,由单电源供电的共直流母线拓扑结构简单,硬件成本低,具有极大的应用前景[3]。同时,衡量其高品质运行性能之一的振动噪声问题愈发被重视。
目前,针对由电机径向电磁力引起的振动,主要是从本体设计[4-5]与驱动控制[6-7]两方面研究。而对于已经生产好的电机,更多的是利用控制方法进行减振。同时,定子绕组相电流谐波丰富了径向电磁力谐波,使得电机振动加剧,可通过谐波抑制来减弱电机振动[8]。
共母线OW-PMSM系统存在零序回路,流过的零序电流使相电流中含有大量3次谐波[9]。针对零序电流,可通过选取不产生共模电压的空间电压矢量进行调制[10],从源头上消除零序电流,但该方法母线利用率低,最大调制系数仅为1。文献[11]通过调整插入等效零矢量的作用时间,抵消基本矢量合成时的共模电压,但调制算法需要进行2次扇区判断且动态性能不足。文献[12]提出移相解耦调制,通过闭环调节解耦角抑制零序电流,但并没有很好地兼顾高调制系数和算法简洁性。
空间矢量脉宽调制(SVPWM)常用于现代电机控制,开关频率整数倍处的谐波幅值较高,导致电机产生相应的高频振动[13-14]。随机脉宽调制技术(RPWM)在不增加硬件条件下,能够有效降低高频谐波幅值[15-18]。目前,RPWM实现途径主要有零矢量作用时间随机化、脉冲位置随机化和开关频率随机化。文献[16]研究了不同的RPWM方法,通过大量仿真与试验,结合实现难度优先选择了随机零矢量和随机开关频率调制(RSFM)。文献[17]将这2种RPWM方法结合实现了双随机扩频调制,进一步抑制了高频噪声。文献[18-19]通过结合RPWM技术,取得了较好的减振效果。以上研究对象均是传统PMSM,而关于OW-PMSM驱动系统电流谐波的分布,以及应用RPWM后对其振动的影响均还没有相应研究。

1 共母线OW-PMSM驱动系统
1.1 驱动拓扑与空间电压矢量
共母线OW-PMSM驱动电路拓扑结构如图1所示。其中,电机定子绕组两端分别接三相逆变器INV1与INV2。双逆变器结构开关状态灵活多样,对应在OW-PMSM中形成的空间电压矢量数量更多,需要系统地分析。
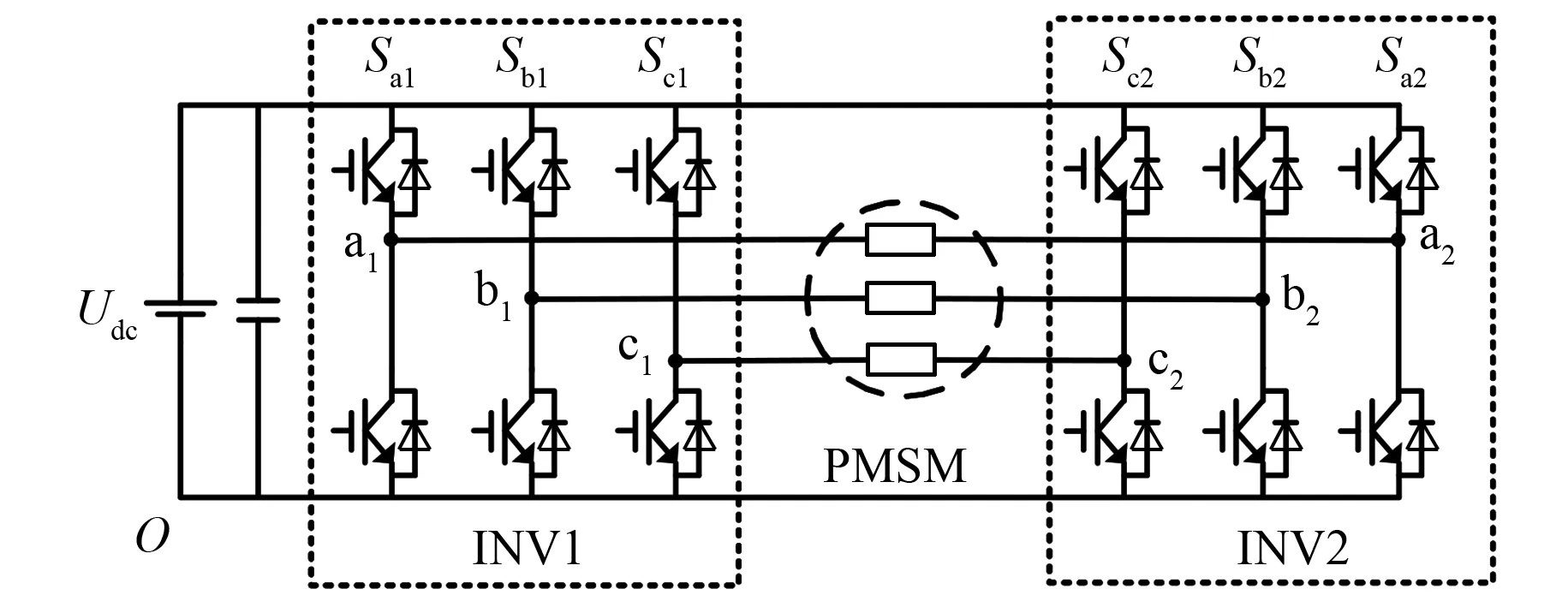
图1 共母线OW-PMSM拓扑结构
逆变器每个桥臂上下管对称导通,以Sa1为例,将上管导通记作“1”,下管导通时记作“0”。由于电机定子绕组空间上相差120°,因此2个逆变器组单独作用时电压空间矢量分布如图2所示,每个非零电压矢量的幅值为2/3Udc。

图2 单逆变器空间电压矢量
在开绕组结构中,电机相电压的值可表示为对应绕组所接双逆变器输出电压之差:

(1)
式中:un1和un2(n代表相序)为逆变器INV1和INV2输出电压。
由此,双逆变器合成的空间矢量电压如图3所示。

图3 双逆变器空间电压矢量分布
1.2 双逆变器的共模电压与零序电流
共母线OW-PMSM驱动系统中性点打开,存在零序回路,且相电流中3次谐波成分不能相互抵消,其零序回路电压方程[9]如下:

(2)
式中:u0为双逆变器的共模电压,即OW-PMSM中的零序电压;R为相电阻;i0为零序电流;L0为定子绕组电感零轴的分量;ωe为电机的电角速度;ψf3为转子永磁体磁链三次谐波幅值;θ为电机的电角度。
可以看出,OW-PMSM系统中零序电流主要来源是共模电压和永磁磁链谐波。因此,通过消除或抑制逆变器的共模电压可以有效地抑制零序电流,减小相电流3次谐波含量。双逆变器结构中共模电压u0由两个逆变器共同产生:

(3)
因此,双逆变器不同开关状态产生对应的共模电压。以开关状态43′(100011)为例:
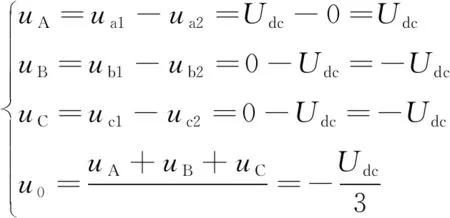
(4)
类似地,可以计算出各开关状态对应的共模电压u0,如表1所示。

表1 双三相PMSM参数
双逆变器系统不同开关状态共产生7种共模电压值。其中,有20个开关状态对应的共模电压为零,其对应的空间电压矢量为图3中的HJLNQS和零矢量O。因此,使用这些矢量进行调制,双逆变器产生的共模电压为零。但是,该方法固有缺陷是母线电压利用率较低,最大调制系数仅为1[10]。
2 零序电流的抑制
2.1 调制过程与零矢量的选择

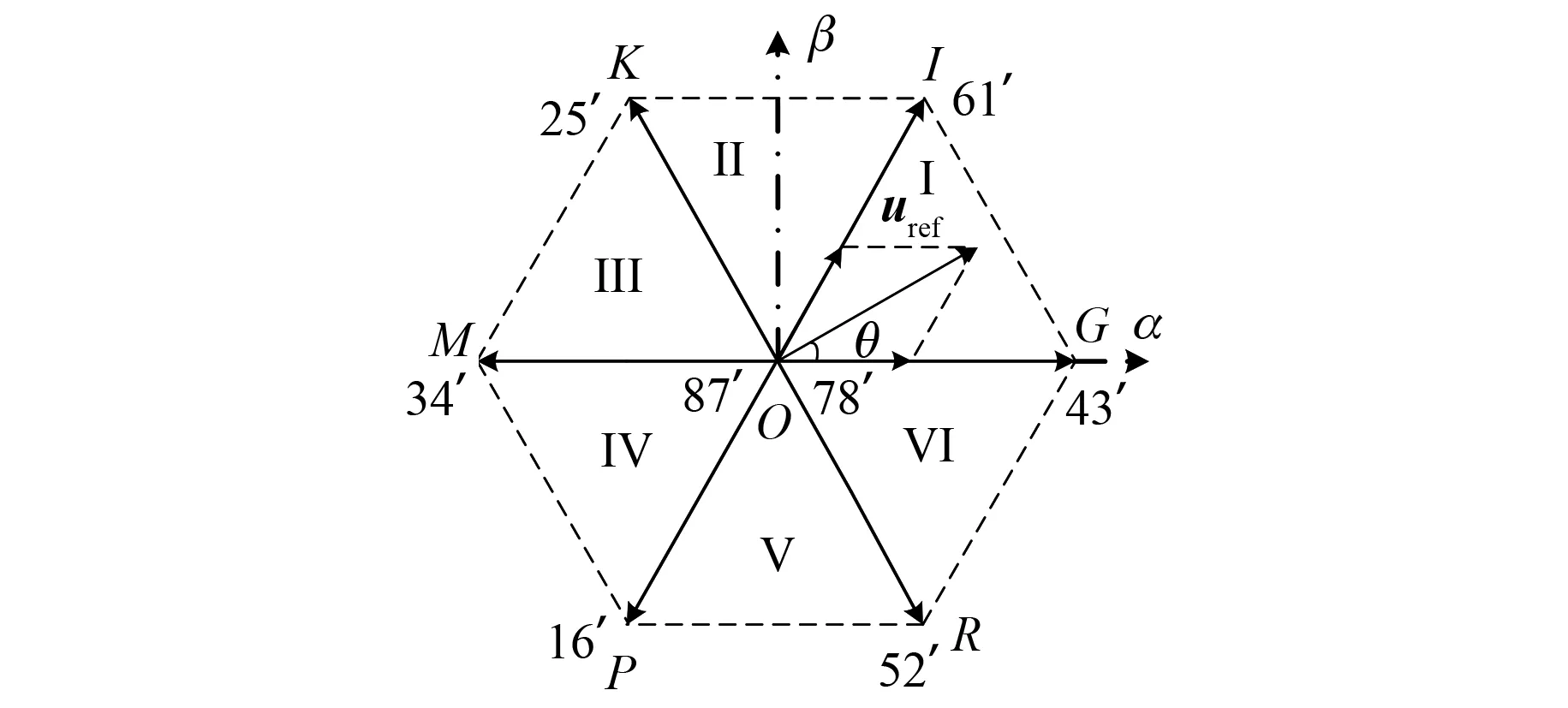
图4 扇区划分与矢量合成原理
图4中,uref为参考电压矢量,其与α轴的夹角为θ。类似传统三相SVPWM,参考电压矢量所在的扇区可通过uα和uβ的值判断。同时,每个扇区内相邻矢量的作用时间可由伏秒平衡原则求出,令:
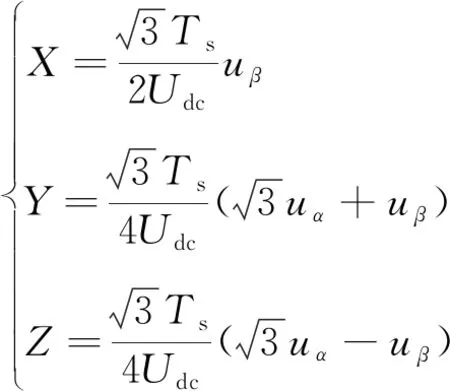
(5)
式中:Ts为开关周期值。
定义t1和t2分别为第1个和第2个有效矢量的作用时间,各个扇区相邻有效矢量的作用顺序与作用时间如表2所示。

表2 各扇区相邻矢量作用顺序与作用时间
传统开绕组SVPWM中一般选用88′(000000)和77′(111111)作为零矢量,如图5(a)所示,会造成逆变器组某一桥臂在单个开关周期内开通关断3次。本文创新性地选用87′(000111)和78′(111000)作为零矢量,如图5(b)所示。可以看出,逆变器组各个桥臂在单个周期内仅开关一次,功率器件损耗降低。同时,电机每相绕组前后桥臂对称导通,这也是本文调制方法的一个优点,可适用于三相独立H桥驱动系统。观察表1可知,零矢量87′和78′的共模电压值不为零,可利用此特性进行下一步的研究。
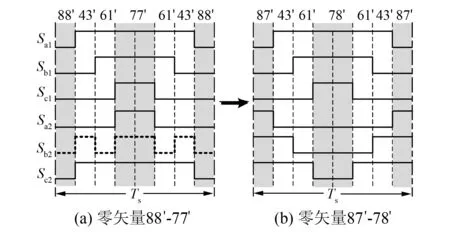
图5 选取不同零矢量Ⅰ扇区PWM信号
2.2 零序电流闭环控制
对照表1所列的共模电压值,由伏秒平衡,扇区Ⅰ中单个开关周期内逆变器的共模电压为

(6)
式中:t01、t02分别为零矢量87′和78′的作用时间,其中有效电压矢量作用时间t1和t2不相等时,双逆变器产生的共模电压u0不为零。
为了使得共模电压u0在一个开关周期Ts内的和为零,本文将通过重新分配零矢量的作用时间,抵消非零电压矢量产生的共模电压。引入零矢量分配系数k,令:

(7)
此时,有:

(8)
进一步可以求出分配系数k的表达式:

(9)
为了动态抑制零序电流,在原有的转速电流双闭环控制系统中引入零序电流环,如图6所示。给定零序电流值i0ref=0,与零序电流i0的负反馈形成闭环控制系统。得到的零序电流差值通过PI控制器输出共模电压,由式(9)求得分配系数k。

图6 零序电流闭环控制
需注意的是,该方法仅在低调制深度能使共模电压为零。当θ=0时,非零电压矢量仅有43′作用,产生的共模电压最大,为-Udc/3。此时,零电压矢量能产生的最大反向共模电压,是由零矢量78′单独作用。若共模电压完全抵消,则:

(10)
式中:t0为零矢量作用时间;t1为非零矢量作用时间。
t0、t1的值可表示为

(11)
将式(11)代入式(10)中,可求得此时参考电压矢量uref的幅值:
uref=Udc
(12)
此时为共模电压抵消极限情况,调制系数为1。随着uref的增加,非零矢量产生的共模电压不能完全被抵消,零序电流闭环只能起到抑制作用。
3 电流高频谐波的抑制
零序电流闭环控制实现了对开绕组电机相电流3次谐波含量的抑制,使得电机低频段相应频率的径向电磁力幅值减小。同时,逆变器开关管通断还会引入相电流高频谐波含量,集中在开关频率及其整数倍处,使得电机发生高频振动,并影响驱动系统的电磁兼容。为了抑制电流高频谐波,引入随机开关频率调制。
3.1 随机开关频率调制
由Parseval定理,保持信号在时域能量的分布,则该信号在频域内能量不变[20]。因此,通过变化开关频率,原本集中的能量从窄频带分散到较宽的频带范围,达到减弱振动幅值的目的。同时,RSFM中开关频率的变化规律如下:
f=fc+RΔf
(13)
式中:fc为中心开关频率;R为[-1,1]之间的随机数;Δf为开关频率变化的范围。
参考电压在扇区Ⅰ时,相邻开关周期的脉宽调制(PWM)信号如图7所示。与传统三相PMSM不同的是,OW-PMSM中有6对开关管,RSFM带来的开关损耗增大,且开关频率的变化可能会对低频段3次谐波和振动产生消极影响。因此,必须谨慎地选择开关频率f,避免增加电机的低频振动与减少开关损耗。同时,扩频后电机振动频率也可能与固有模态频率重合,引起共振使电机振动加剧。本次Δf的取值是在结合电机实际运行工况,调整后取值为1 kHz。

图7 RSFM相邻周期PWM信号示意图
3.2 随机数生成方法
RSFM中随机数的生成影响着扩频策略的性能,良好的随机数发生器必须满足以下条件:(1)符合随机样本均匀分布规律;(2)生成随机序列周期较长;(3)生成速度快且适用于数字控制系统等特点。据此,本文采用的随机数生成方法为线性同余法,产生0~1之间的随机数R0,其递推式如下:
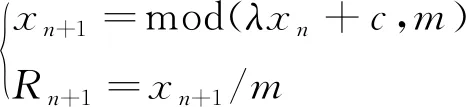
(14)
式中:λ为乘子,取3 571;c为增量,取1;m为模量,取32 749;初值x0取3。
结合前文所述,提出基于零序电流闭环的零矢量重分配RSFM控制策略(Z-RSFM),如图8所示。通过零序电流闭环求得分配系数,与随机数R一同作为RSFM的输入量进行调制,分别输出PWM1、2控制双逆变器驱动开绕组电机。该算法能够同时抑制电流3次谐波含量并减小开关频率处高频谐波幅值,达到OW-PMSM全频段振动抑制的目的。
4 试验验证
搭建试验平台,如图9所示。驱动器以TI公司TMS320F28377为主核,采用CPLD作保护电路,开关管选用分立器件IGBT。同时,利用加速度传感器采集振动数据。OW-PMSM驱动系统部分参数如表3所示。

图8 基于零序电流闭环的零矢量重分配RSFM控制策略

图9 试验平台

表3 OW-PMSM驱动系统部分参数
4.1 零序电流抑制试验
采用零序电流闭环前后,用示波器采集电机相电流和零序电流波形,如图10和图11所示。图12为相电流快速傅里叶分析(FFT)结果。

图10 相电流试验对比

图11 零序电流试验对比

图12 低频段相电流FFT
从图10可以看出,采用零矢量重分配的零序电流闭环控制后,开绕组电机相电流波形正弦度明显提升,且图11中零序电流峰值从3.11 A降至0.49 A,零序电流抑制效果明显,由于永磁磁链谐波的存在不能完全为零。图12中,总谐波畸变率THD从36.04%降至21.04%,相电流3次谐波含量从28.48%降至4.33%,零序电流抑制效果良好。
开关频率处的高频电流谐波分布如图13所示。从图13可以看出,闭环前开关频率10 kHz处电流谐波含量达到20.81%,采用零序电流闭环策略后,随着零矢量作用时间变化(类似随机零矢量调制),其谐波幅值略有减小,但依然达到了18.61%。
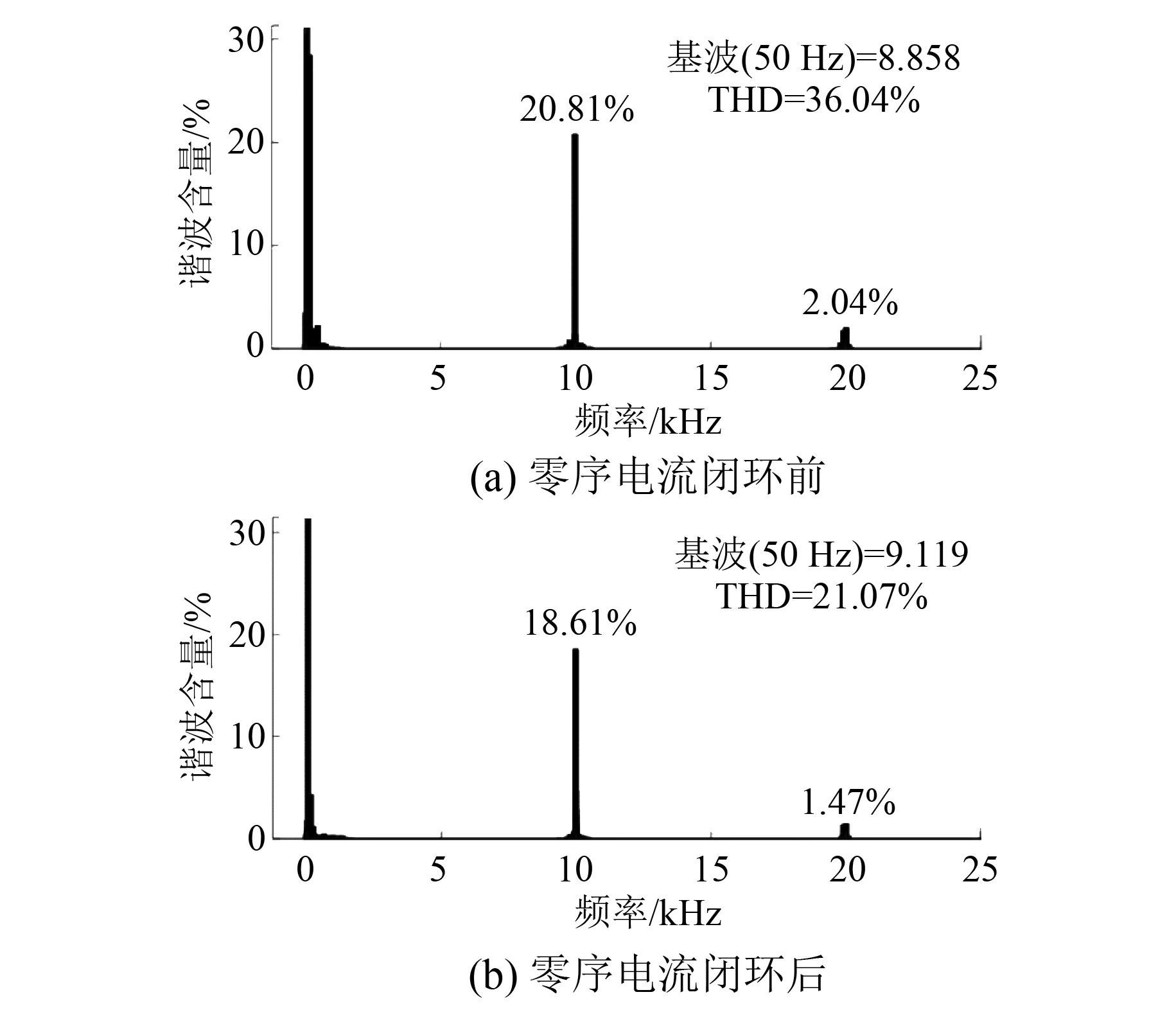
图13 高频段相电流FFT
4.2 扩频调制试验
采用本文所提基于零矢量重分配的Z-RSFM,开关频率随机变化范围设置为9~11 kHz。试验结果如图14~图16所示。
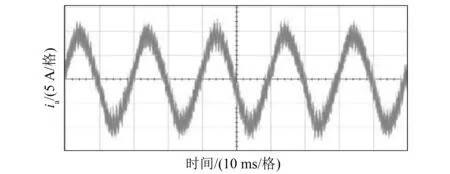
图14 Z-RSFM相电流试验波形
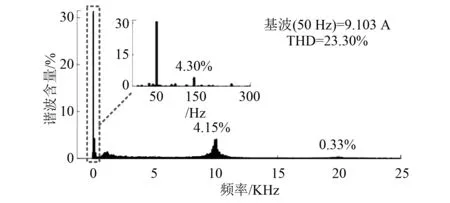
图15 Z-RSFM相电流FFT
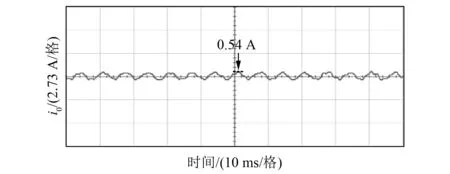
图16 Z-RSFM零序电流
从图14可以看出,增加RSFM控制方法后,相电流波形纹波小幅度增加。从图15可以看出,开关频率的变化导致THD略微增大,但相电流3次谐波含量为4.30%,说明RSFM对3次谐波抑制效果影响较小。其中,开关频率10 kHz及20 kHz处谐波含量幅值大大减小,分别减小至4.15%和0.33%,抑制效果明显。同时,虽然图16中零序电流波形稍有畸变,但峰值变化较小,进一步说明其对零序电流影响较小。
功率谱密度估计(PSD)能够分析信号能量在频谱上的分布情况[16-17]。图17为相电流的PSD分析图。采用传统SVPWM算法的相电流信号功率谱较为离散,信号能量集中在开关频率及其整数倍数处,因此其高频噪声显著。采用Z-RSFM后,PSD趋近于均匀连续,说明信号能量在高频处得以扩展。

图17 Z-RSFM相电流PSD对比
4.3 振动试验
为了验证所提算法对开绕组电机的振动抑制效果,对控制前后电机的振动进行测量比较,试验结果如图18和图19所示。从图18可以看出,电机在开关频率及其整数倍处的振动加速度幅值显著减少,10 kHz附近从30.5 m/s2降低至7.02 m/s2,20 kHz附近从7.5 m/s2降低至0.84 m/s2,高频减振效果显著。

图18 振动加速度试验

图19 低频段振动加速度测试结果
图19为低频段振动加速度试验结果对比,主要频率点数值对比如表4所示。采用本文所提算法前后,电机的振动加速度幅值在6倍电频率(300 Hz)和11倍电频率(550 Hz)等频率点处减小效果明显,幅值的降低率分别达到29.26%和39.06%。数据显示,电机仅在200、400、700 Hz处振动加速度幅值有极小的增加,整体减振效果良好。

表4 低频段振动加速度幅值对比
5 结 语
本文针对由电流谐波引起的共母线OW-PMSM电磁振动的问题,提出了一种零序电流闭环的零矢量重分配随机开关频率调制策略。该策略有以下优点:
(2) 选用零电压矢量抵消非电压零矢量产生的共模电压,闭环后能动态地抑制零序电流,使得相电流3次谐波含量大大减小,进而减弱了电机低频振动。
(3) 所提出的Z-RSFM能够同时抑制相电流3次谐波和开关频率整数倍处的谐波幅值,最终实现了OW-PMSM系统全频段的振动抑制。
