基于本征图像滤波的可见光图像处理方法*
2021-04-22孙婷婷
孙婷婷, 单 巍
(①淮北职业技术学院计算机系;②淮北师范大学物理与电子信息学院,235000,安徽省淮北市)
0 引 言
可见光和红外图像在当今社会的安防、监控、安全调查中广泛应用,红外图像对拍摄环境要求低,对天气、环境等干扰不敏感,可全天进行拍摄,深受市场欢迎.然而红外图像分辨率低,无法显示颜色、纹理结构等信息[1],因此在需要显示物体细节时,大量使用可见光拍摄系统.由于可见光图像具有高分辨率、细腻的纹理信息等优点[2],被广泛应用于电力巡检、在线监测工业故障、行人检测等领域.但是相比红外成像,可见光图像极易受到噪声的干扰,使得可见光图像的应用大大受到限制.因此对可见光图像进行去噪处理是其中最重要的应用,也是难点问题.早期的可见光图像去噪,主要以空域滤波法和频域滤波法为主.其中,空域滤波法包括经典的中值滤波、高斯滤波、维纳滤波等,但是空域滤波普遍对图像细节处理欠佳,滤除噪声的同时,也造成图像部分模糊不清.相比空域滤波,频域滤波处理效果较好,包括巴特沃斯滤波、傅里叶变换法、小波滤波等.例如,刘干等[3]采用小波变换处理结构光光条图像,能较好的去除光条图像中的噪声,同时也损失了部分细节特征.解秀亮等[4]采用多尺度小波阈值分解方法提取火焰目标图像的小波系数,对图像进行去噪、分割处理,提取的火焰亮度特征变化以平滑的曲线显示,损失了部分火焰图像内部信息.针对上述问题,为了进一步改善图像处理的效果,在损失较小的情况下恢复原始图像,我们将本征图像滤波法应用于图像处理领域,以经典的奇异值分解算法(singular value decomposition,SVD)为例,探讨该算法重构空间的选取,通过高斯噪声和椒盐噪声污染的图像去噪实验,表明该算法在图像去噪领域有效可行,可用于实际工程中对信源进行压缩.
1 本征图像滤波原理
本征图像滤波算法是将输入图像分解为多个子图,通过对子图进行选择重构来压制随机噪声.只要子图的维数选择合理,不仅能有效提高图像信噪比,且对有效信息的畸变非常小.本征图像滤波法的基础是SVD算法,其广泛应用于地震数据[5],工频干扰等领域进行信源空间压缩,减少后续工作量.以SVD分解为基础的本征图像滤波法处理噪声污染图像的原理描述如下[6-8]:
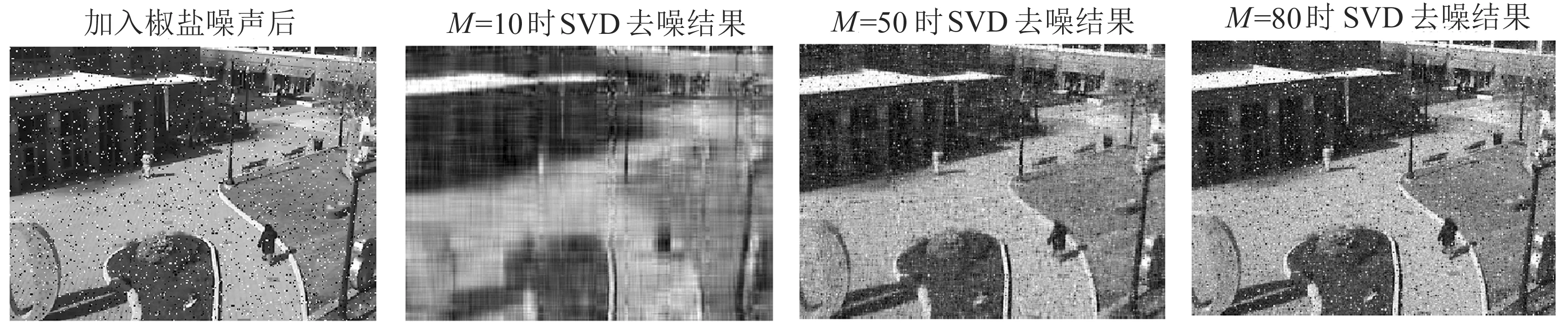
假设有一个二维的灰度图像S,它的范围为m×n(一般m (1) 对X进行奇异值分解得到左右奇异矩阵U,V和奇异值矩阵Σ (2) 根据奇异值分解的第一个性质可知[9],σ1≥σ2≥…≥σm≥0.在图像处理中,根据图像与噪声的分布情况,一般,奇异值越大对应图像信号,奇异值越小对应噪声信号,因此排在后面的奇异值对应噪声的可能性就越大.式(2)可以表达为: (3) 式中Σs=diag[σ1,σ2,…,σp],代表图像信号的奇异值,ΣN=diag[σp+1,σp+2,…,σm],代表噪声信号的奇异值.从另一个角度来看,经过奇异值分解,污染图像被分解为一系列m×n维的加权本征图像: (4) 假若p=rank(S)是图像矩阵的秩,一般令其对应图像的维数,为了完全的恢复原始图像,则进行重构的图像维数不应小于p阶,一般,采用p阶重构就可以恢复原始图像: (5) 此时由于噪声信号的奇异值被舍弃,也就实现了噪声的去除,剩下的m-p个加权本征图像叠加起来就是污染图像中的随机噪声.在实际操作中,信号空间维数的确定往往依赖操作者的经验,依照奇异值序列曲线上显示的信号特征来手动选取.重新考虑式(1)中的图像X,对X做奇异值分解,就是将其中的图像矩阵S和噪声矩阵N同时投影到由左、右奇异矩阵中的向量所构成的子空间中.则奇异值矩阵可以表示为: S=S1+S2, (6) Σ=Σ1+ImσN, (7) 所以在奇异值曲线上应该有r个较大的奇异值,这r个较大的奇异值的幅度等于图像矩阵所对应的奇异值和σN之和;曲线上还有m-r个较小的奇异值,这m-r个较小的奇异值幅度是相同的,都等于σN.很明显的,这m-r个幅度相同的小奇异值对应的就是噪声空间,将这些奇异值截断,进行r阶的重构就可以达到压制随机噪声的目的,并且由于我们保留了图像空间的所有奇异值,所以对原始图像没有任何的畸变.从这里我们还可以看到,奇异值分解的去噪算法在理论上也是不可能完全去除随机噪声的,保留下来的信号空间奇异值可以表示为 Si=Ss,i+SN, (8) 其中i=1,2,…,r,也就是说,保留的对应信号空间的奇异值中也含有噪声的成分,所以完全去噪是不可能的.在实际中,由于噪声样本不是无限长的,所以也不可能是完全统计独立的,表现在奇异值曲线上就是,最后的m-r个小的奇异值幅度也是递减的,但是其变化幅度不大,与信号空间对应的奇异值之间有一个“拐点”.奇异值分解去除图像噪声的理想情况是前p几个奇异值的值远大于后面的噪声奇异值,并且p越小越好,因为分解后每个奇异值中都混合有噪声的成分,所以用越少的本征图像重构,去噪后所含的噪声就越少. 采用室外监控系统获取的灰度图像(大小为240×320),加入常见的均值为0,标准差为0.1的高斯随机噪声,分别对其进行不同维数的重构.将噪声污染的图像进行分解,所得奇异值按降序方式排列,如图1所示.在图1中,前15个奇异值相比后序奇异值数值最大,16~55个数值中等,55~240个数值最小且基本恒等.因此,实验分别选取重构维数M为10,50,80,结果如下页图2所示. 图1 奇异值分解结果 由图2可知,M=10时去噪结果最差,图像模糊不清,还原程度最低.分析原因可知,第10个奇异值是一个明显的拐点,数值远远大于后序奇异值数值,其对应图像中轮廓的、边界的部分(这些部分矩阵的相关性最强),因此重构后对于边缘部分的效果较好.观察M=10去除的噪声,内部包含大量的有用信息,尤其包含反映轮廓特征的信息,说明选取重构的维数不足时,本征图像滤波法根本无法重构原始图像,还会损失大量有用信息.M=50时去噪效果最好,去除的噪声中只包含少量图像信息.M=80时也能完全重构图像,且去除的噪声中几乎不含图像信息,但是对比M=50时的去噪结果可知,此时重构后的图像中包含的噪声明显增多,达不到去噪要求.这表明,过大的重构维数将引入过多的噪声,只有合适的维数才能完全的、失真最小的恢复原始图像.为了增加本征图像滤波法的多样性,分别选取不同重构维数,对图像中常见的椒盐噪声进行处理,结果如下页图3所示. 图2 不同维数重构结果(高斯噪声) 图3 不同维数重构结果(椒盐噪声) 由图3可知,不同重构维数对去除噪声的结果影响较大,过少的维数不能完全重构原始图像,过大的维数会引入过多的椒盐噪声,只要恰当的维数才能达到最佳效果,其中M=50时的去噪结果最好.然而对比图2可知,同样的重构维数时,高斯噪声的重构结果明显优于椒盐噪声的重构结果.以图像去噪中最广泛的参数信噪比(signal-to-noise ratio,SNR)和峰值信噪比(peak signal-to-noise ratio,PSNR)[11],作为本次实验结果的评价参数,将高斯噪声和椒盐噪声的重构结果分别显示在表1中,其中参数的数学描述为: (9) (10) (11) 式中,y是原始图像数据,yo是去除噪声后图像数据,N是图像维数,‖•‖是L2范数.PSNR值越大表明图像重构的效果越好,而SNR值越大表明去除的噪声越干净.由表1可知,针对高斯噪声的处理结果,其PSNR,SNR均大于同等维数的椒盐噪声处理结果,表明本征图像滤波法对高斯噪声的去除能力强于椒盐噪声.在高斯噪声处理中,M=80时的SNR值小于M=50的值,进一步说明过大的重构维数虽然能完全重构图像,但是去除噪声的能力也随之下降. 表1 不同噪声下重构图像的评价参数 本文将本征图像滤波法中经典的SVD算法应用于可见光图像去噪,在SVD分解原理中,重点探讨了重构维数的选取方法,通过实验对不同维数重构的效果进行验证与探讨,实验结果表明过小的维数不能重构原始图像,过大的维数虽然能完全重构图像但也会引入更多的噪声,只有恰当的维数才能完全且较少失真的恢复原始图像.与椒盐噪声污染的图像去噪能力相比,SVD算法更擅长处理高斯噪声.然而,分析SVD算法的原理可知,以舍弃噪声重构原始图像为核心的本征图像滤波法完全去除噪声是不可能的,图2、图3也反映了这一点.但是在海量的监控视频中(单帧图像),采用SVD算法可初步对其进行降维(空间压缩),为后序图像处理提供基础,在实际工程中具有重要意义.
2 重构空间的选取

3 实验结果



4 结 论