电动特种车辆超低速电机控制策略
2021-04-22高建树田翼萌张埔宁
高建树, 田翼萌, 张埔宁
(1.中国民航大学机场学院, 天津 300300; 2.中国民航大学电子信息与自动化学院, 天津 300300)
为加速推进智慧机场建设,大力推广使用新能源设备和车辆已成为中国各大机场近几年的重要任务。由于机场的特种车辆存在超低速近机、超低速对接等特殊行驶工况,使得机场司对于机场特种车辆速度控制要求不断提高。原有的燃油车低速行驶存在着控制不平稳、操控性难的问题,而电动车可通过精确地数字计算对内置永磁同步电机(built-in permanent magnet synchronous motor,IPMSM)进行精确控制。目前市场中绝大多数电动车一般都采用以转矩为目标、传统比例积分(proportion integration,PI)控制的矢量控制方法,但此方法并不适用于机场环境下电动汽车极低速平稳运行的特殊工况,因此,针对如何实现电动汽车电机低转速精确稳定控制已成为近些年的研究热点。
诸多学者对于不同电机超低速调速性能作了深入研究。文献[1]针对无速度传感器控制提出一种新的全阶自适应观测器算法,可实现感应电动机在低速、极低速和零速下稳定运行。文献[2]通过采用滑膜变结构控制器加以改进,提高了系统的响应速度和抗干扰能力。文献[3]将最大转矩电流比加以改进,利用综合电流矢量等效替代转矩控制。此外,多数极低速研究围绕以转矩为控制目标,对闭环模型作相应改进,针对类似于超低速行驶的特殊工况下恒转速控制研究较少[6-12]。
现提出一种电动特种车辆超低速行驶工况下恒定转速运行的双闭环模糊控制策略,将汽车以转矩为控制目标转变为转速为控制目标,对于优化电动特种车特殊工况下的行驶性能起到重要作用,对实现自主研发性能优良的电动行李牵引车具有重要参考价值,为推动电动特种车辆产业的发展具有重要意义。
1 d-q轴数学模型及矢量控制原理
1.1 d-q轴数学模型
首先对电动特种车用到的内置式永磁同步电机作如下假设:①定子上的绕组接法为Y形,三相绕组对称排布,各相绕组空间上相差120°,转子中的永磁体在定转子气隙内产生主磁场沿气隙圆周呈正弦分布[4];②忽略定子绕组齿槽对气隙磁场分布的影响[4];③假定铁芯磁导率无穷大,忽略定子铁芯与转子铁芯的涡流损耗与磁滞损耗[4]。
基于上述假设,建立永磁同步电机d-q轴数学模型[4]。
(1)
(2)
(3)
(4)
式中:所有参数均为d-q坐标系下的参数;ud、uq分别为IPMSM定子电压矢量在d轴和q轴的分量;R为三相对称定子绕组一相电阻;P为微分算子;id、iq分别为IPMSM定子电流矢量在d轴和q轴的分量;ψd、ψq分别为d轴磁链分量和q轴磁链分量;Ld、Lq分别为电枢电感在d轴和q轴的分量;ωr为电机转子电角速度;ωm为电机转子机械角速度;ψf为电机永磁体磁链;Te为电机电磁转矩;Tl为电机负载转矩;J为电机转动惯量,B为电机轴摩擦系数[5]。
1.2 电动汽车电机矢量控制原理

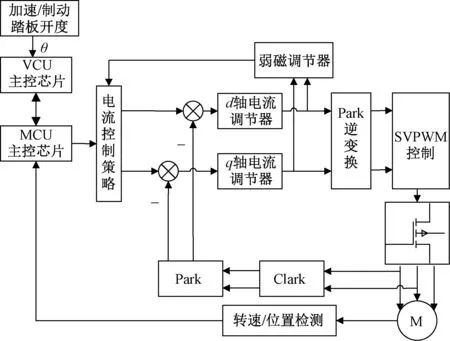
图1 电动汽车电机控制策略系统框图Fig.1 Frame diagram of electric vehicle motor control strategy system
2 恒转速双闭环模糊矢量控制系统
针对民航机场电动特种车辆(如飞机牵引车、行李传送车和行李牵引车等)超低速行驶的特殊工况,要求到达指定位置后稳定超低速对接飞机或者托盘。这要求超低速行驶时电机尽可能以精准的转速稳定运行,并具有较快的响应速度以及较强的抗干扰能力。
基于以上考虑,将转矩控制转为恒转速控制策略,速度调节器与电流调节器全部改为模糊PI参数自整定控制器,结合电压前馈补偿的电流调节器对电机进行控制。此工况下转速较低,不存在弱磁电流调节,但考虑到正常行驶下依旧存在弱磁过程,所以对于弱磁环节依旧保留,不予讨论。控制策略总结如下:汽车正常行驶时采用基于转矩控制的MTPA与弱磁相结合的控制策略;汽车超低速行驶时采用恒转速控制下的双闭环模糊PI控制策略。电动汽车电机改进控制策略系统框图如图2所示。
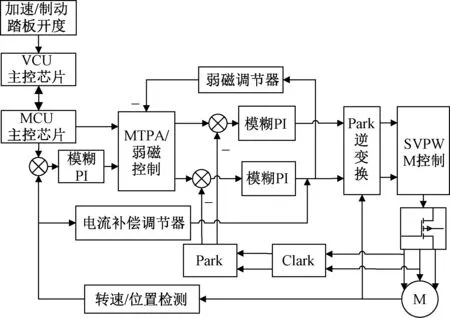
图2 电动汽车电机改进控制策略系统框图Fig.2 Frame diagram of electric vehicle motor improvement control strategy system
2.1 双闭环模糊自整定控制器
为提高电动特种车超低速运行时电机的动态响应能力和抗干扰能力,将模糊控制方法与传统PI策略相结合,构建模糊PI控制器。
2.1.1 输入输出变量

(5)

2.1.2 模糊控制器参数
模糊控制器输入和输出都是精确量,主要有输入误差、输入误差变化率、输出ΔKp、输出ΔKi4个参数的论域,所以转速与电流两个模糊控制器共8个主要参数。
转速环误差(E)的论域{-xe,xe}的取值为
{-xe,xe}={-30,30}
(6)
转速环误差变化率(Ec)的论域{-xec,xec}的取值为
{-xec,xec}={-300,300}
(7)
转速环输出量ΔKp的论域{-yp,yp},转速环输出量ΔKi的论域{-yi,yi},有
{-yp,yp}={-yi,yi}={-3,3}
(8)
转速环误差(E)的论域{-xe,xe}
{-xe,xe}={-300,300}
(9)
电流环误差变化率(Ec)的论域{-xec,xec}
{-xec,xec}={-3 000,3 000}
(10)
上述4个变量模糊子集的论域{-m,m}的取值为
{-m,m}={-3,3}
(11)
2.1.3 隶属度函数与模糊规则
模糊集合选择7个级别:负大(NB)、负中(NM)、负小(NS)、零(ZO)、正小(PS)、正中(PM)、正大(PB)。在隶属函数选取上,选取计算量小、灵敏度高的三角形隶属函数作为输入和输出的隶属函数,输入输出隶属度函数如图3所示。
依据专家经验与仿真数据制定了转速环与电流环ΔKp、ΔKi的模糊控制规则,设计规则如下:①当误差波动很大时需要尽快做出调整,增大Kp并减小Ki;②当误差波动一般时需要避免电机有大的超调,Kp与Ki大小要适中;③当误差波动较小时需要保证电机的稳定与精准,减小Kp并增大Ki。具体如表1、表2所示。
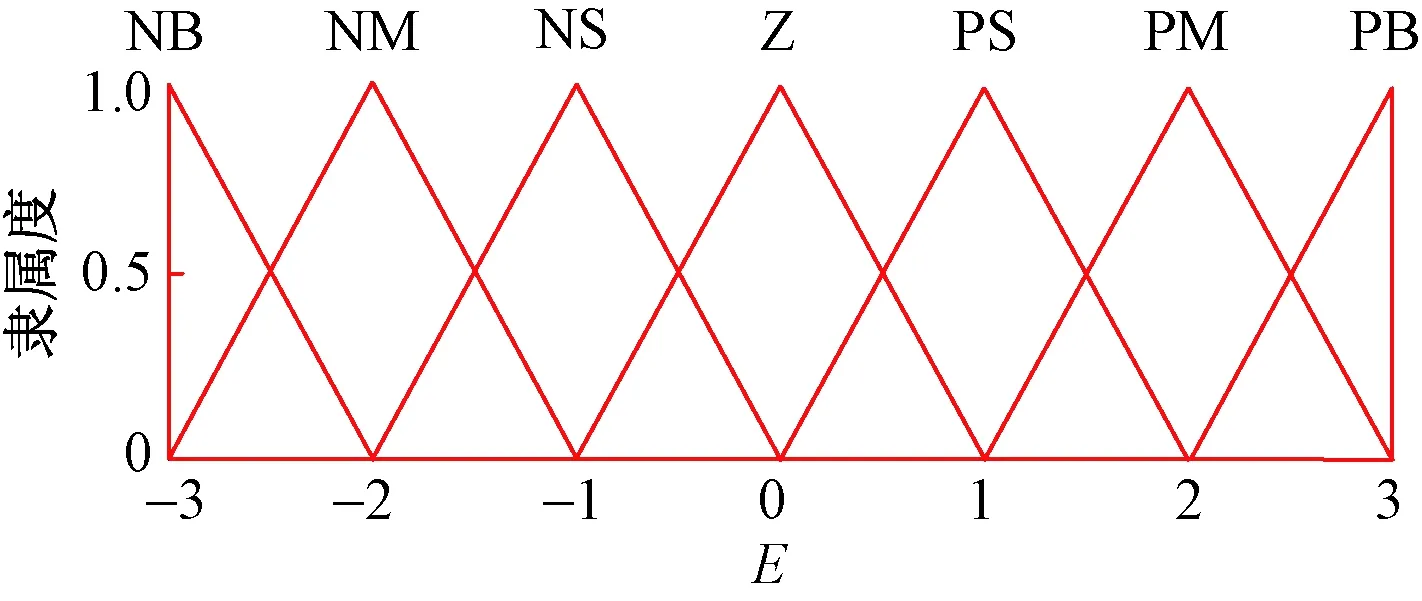
图3 输入、输出隶属度函数Fig.3 Input and output membership functions
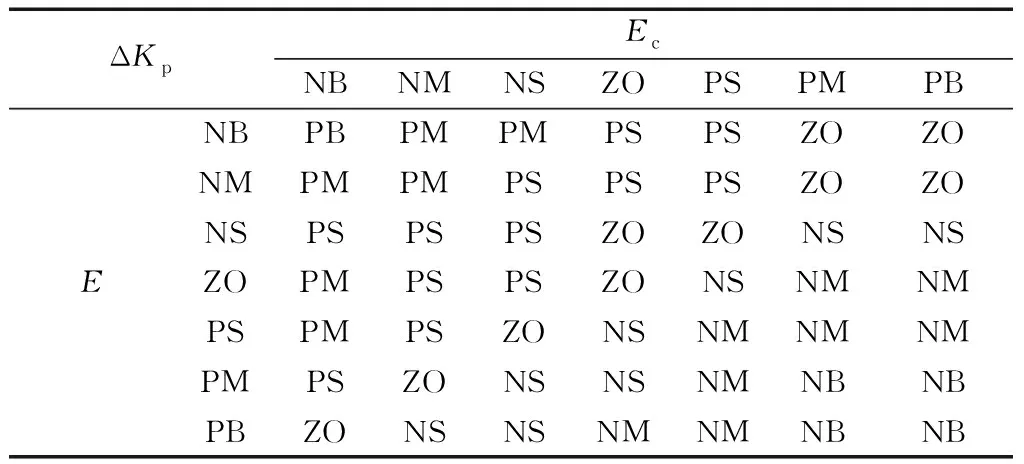
表1 ΔKp模糊规则Table 1 The fuzzy rules of the ΔKp

表2 ΔKi模糊规则
2.1.4 模糊推理与解模糊
运用Mamdani最小运算模糊推理方法得到49条推理语句,最后使用重心法解模糊,具体公式为
(12)
式(12)中:u为输出清晰量;n为输出的量化级数;ui为论域中的元素;μi(ui)为论域元素的隶属度。
2.2 电流补偿调节器

图4 电流补偿调节器Fig.4 Current compensation regulator
为避免正常行驶切换到超低速行驶过程存在的交叉耦合的影响,有必要对电压方程解耦。如图4所示,采用较为成熟的电压前馈耦合法,通过增加电压前馈补偿型电流调节器来实现d-q轴电流环解耦控制。
3 仿真分析与实验验证
3.1 双闭环模糊矢量模型仿真分析
根据改进电动汽车电机改进控制策略系统框图(图2),利用Simulink搭建了基于恒转速控制下的双闭环模糊PI仿真模型。仿真过程中,恒定转速依次通过转速外环模糊PI调节器、MTPA计算得到相应交直轴电流值,其次通过电流内环模糊PI调节器计算出交直轴电压,最终通过SPWM输出6路开关量控制电机运行。仿真参数如表3所示。
此次仿真将PI模型、单一转速模糊PI模型与双模糊PI模型三者分别进行了转速、转矩以及电流的对比,仿真过程如下:模拟超低速行驶中的参数变化,给定初始转速2 000 r/min、0.1 s转速降至20 r/min、0.2 s时突加负载扰动40 N·m,对比双模糊控制、单一转速环模糊控制与PI控制下转速n、转矩Te和电流i三者的区别,仿真结果如图5所示。
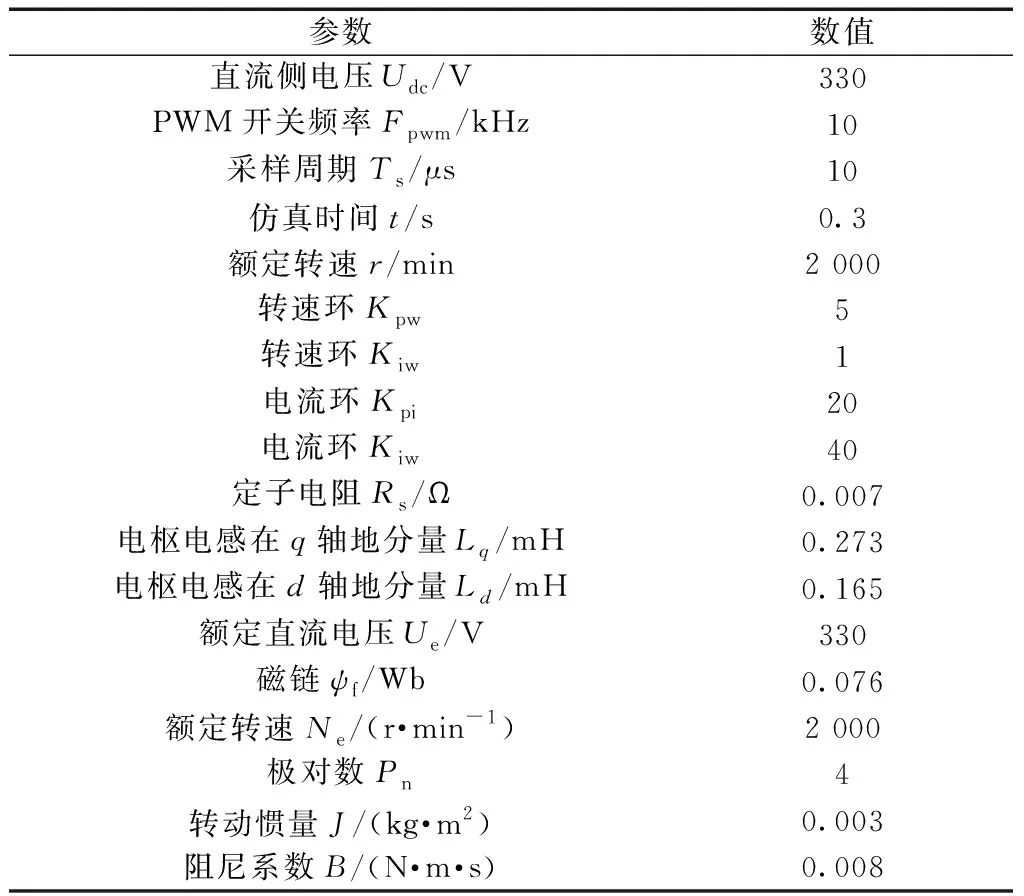
表3 仿真条件参数设置
图5(a)中电机在双模糊PI控制下从始至终都保持最快的响应速度,相比其他两种控制方法,到达初始转速的时间由0.05 s提升至0.03 s,达到极低转速的时间由0.14 s提升至0.125 s。从图5(b)和图5(c)可以看出,当电机在极低速运行下附加扰动时,传统PI下的转速受负载扰动影响偏差较大,双模糊PI相比于PI转矩稳定度提高约16.7%。图5(d)中相比于单一模糊PI,双模糊PI削弱了峰值电流。综上所述,仿真过程中双模糊PI控制下的响应性能与抗扰性能优于另外两种控制方式。
3.2 硬件平台测试分析
实验依托于中国民航大学与唐山德惠航空装备有限公司联合开展的“民航电动行李牵引车辆研发项目”,利用基于DSP28335的硬件平台控制器对电动行李牵引车55 kW电机进行测试,样车主要参数如表4所示。
将底层驱动程序与应用层程序整合后选用CodeWarrior进行编译,并通过上位机下载至中央处理器(central processing unit,CPU)内。调试过程中利用CAN编辑器(CANdb++)进行数据库文件(database can,DBC)制作并导入CAN总线分析仪(peak can explore,PCAN-Explore),然后通过CAN卡采集实车CAN总线数据,利用上位机进行实车数据分析,整个通信过程中CAN采用CAN 2.0 B扩展帧格式,总线通信波特率为250 kbps,实验样车数据采集过程如图6所示。操作过程中驾驶员手动汽车外部开关按钮改变控制器输入开关量,进而切换电机控制策略,汽车将以恒定转速自动运行。
实验转速条件设定为20 r/min,依次测试不同控制策略下电机电流i的响应情况,PCAN-Explore数据采集界面如图7所示。图7(a)表明,双模糊PI控制相比传统PI电流的响应速度提升2.1%,峰值降低了7.2%,稳定时间提升了4.5%。图7(b)显示,相比单一模糊PI电流的响应速度提升3.1%,曲线振幅明显减弱,稳定性得到提升。

表4 电动行李牵引车主要参数

图5 转速、转矩及电流响应曲线对比Fig.5 Comparison of speed, torque and current response curves

图6 实验数据采集Fig.6 Experimental data collection

图7 PCAN-Explore数据采集截面Fig.7 PCAN-Explore data acquisition interface
4 结论
针对机场电动特种车辆超低速行驶的特殊工况制定了一种恒转速控制下的双闭环模糊控制策略,将正常行驶下转矩控制策略转变为转速控制策略,速度环和电流环的PI控制器转换为模糊自适应控制器,并运用Simulink搭建了双闭环模糊矢量仿真模型,对其进行仿真实验验证,同时通过硬件平台进行实车测试,得出如下结论。
(1)仿真条件下双模糊PI控制相比传统PI电流有效提升响应速度,转矩稳定度提高约16.7%。相比于单一模糊PI,双模糊PI削弱了峰值电流。
(2)实车测试结果显示双模糊PI控制相比传统PI电流的响应速度提升2.1%,峰值降低了7.2%,稳定时间提升了4.5%。相比单一模糊PI电流振幅明显减弱,稳定性得到提升。
综上所述,本文方法对于提高转速相应速度、抑制峰值电流、提高转矩稳定性等方面效果明显,可有效提高电动特种车超低速行驶下的快速稳定运行。
