基于模块化多电平换流器电容均压控制的环流抑制策略
2021-04-22周建萍葛祥一茅大钧叶剑桥
周建萍, 葛祥一, 茅大钧, 张 健, 叶剑桥, 方 乐
(上海电力大学自动化工程学院, 上海 200090)
模块化多电平换流器(modular multilevel converter,MMC) 由于方便于模块化生产与调试、换流器输出电压谐波含量低、子模块控制开关频率低且设备冗余留量大等特点[1-4],因此在高电压直流输电(high voltage direct current,HVDC)方面及中高压变频器中具有广阔的应用前景。
MMC的缺点在于所需子模块数量较多,且单个子模块中电容由于没有独立直流电源稳压,子模块电容电压的大幅度波动使元器件产生环流,造成换流器的有功功率损耗增加表面温度升高以及桥臂电流的畸变率变大,使整个系统效率安全性降低。MMC环流抑制是目前 MMC 研究的重点,也是制约其优化 HVDC 系统的主要障碍之一。
MMC内部环流本质上由其桥臂上的能量不均衡引起[5],因此目前主要的抑制环流思路是通过调节MMC内部的电压、电流等物理量抑制相间环流[6-7]。文献[8-10]将多倍频环流分量经过坐标变换转化为直流量加以控制,不仅运算量大而且增加了控制系统的复杂度。文献[11]通过比例谐振(proportional resonant,PR)控制器将相间环流中的二次环流消去,但是没有降低电容电压波动最大化[12]。文献[13-14]为了最大化降低子模块电压波动,通过最优化计算得出环流参考值, 设计了基于最小化电压波动的环流参考值注入策略,但是该方法需要计算确定注入值增大了控制系统运算量,且放弃了环流抑制[15],功率损耗也有所增加。针对上述问题,在MMC电容电压平衡基础上,提出1种将低通滤波器与并联的准谐振控制器(quasi proportional resonant, QPR)结合的新型环流抑制器,使得各桥臂子模块电压波动较小的同时也大幅度抑制了相间低次与高次环流,并通过Matlab/Simulink仿真,仿真结果验证了环流抑制策略是正确有效的。
1 MMC拓扑结构与环流抑制系统设计
MMC拓扑为三相六桥臂结构,上下桥臂各有一个桥臂电感Lm和n个结构相同的子模块SMk,k=1,2,…,n,如图1所示。图1中Udc、Idc分别为直流侧电压、电流;ijp、ijn分别为j相上、下桥臂电流;vj、ij分别为j相电压、电流;vpj、vnj分别为j相上、下桥臂电压;icirj为MMC相间环流(j=a,b,c)。MMC子模块通过电信号控制VT1、VT2的开关状态,使其工作于导通、关断、自锁、故障4个不同的状态;C为子模块稳压电容;Uc为子模块电压。
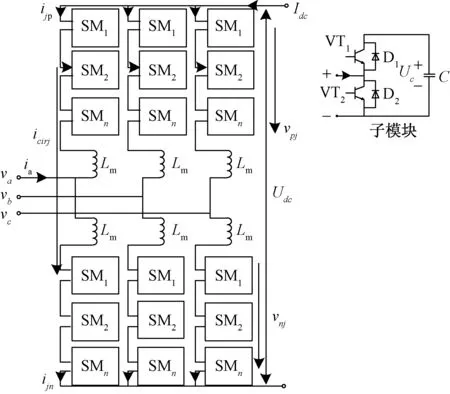
图1 MMC拓扑结构Fig.1 MMC topology
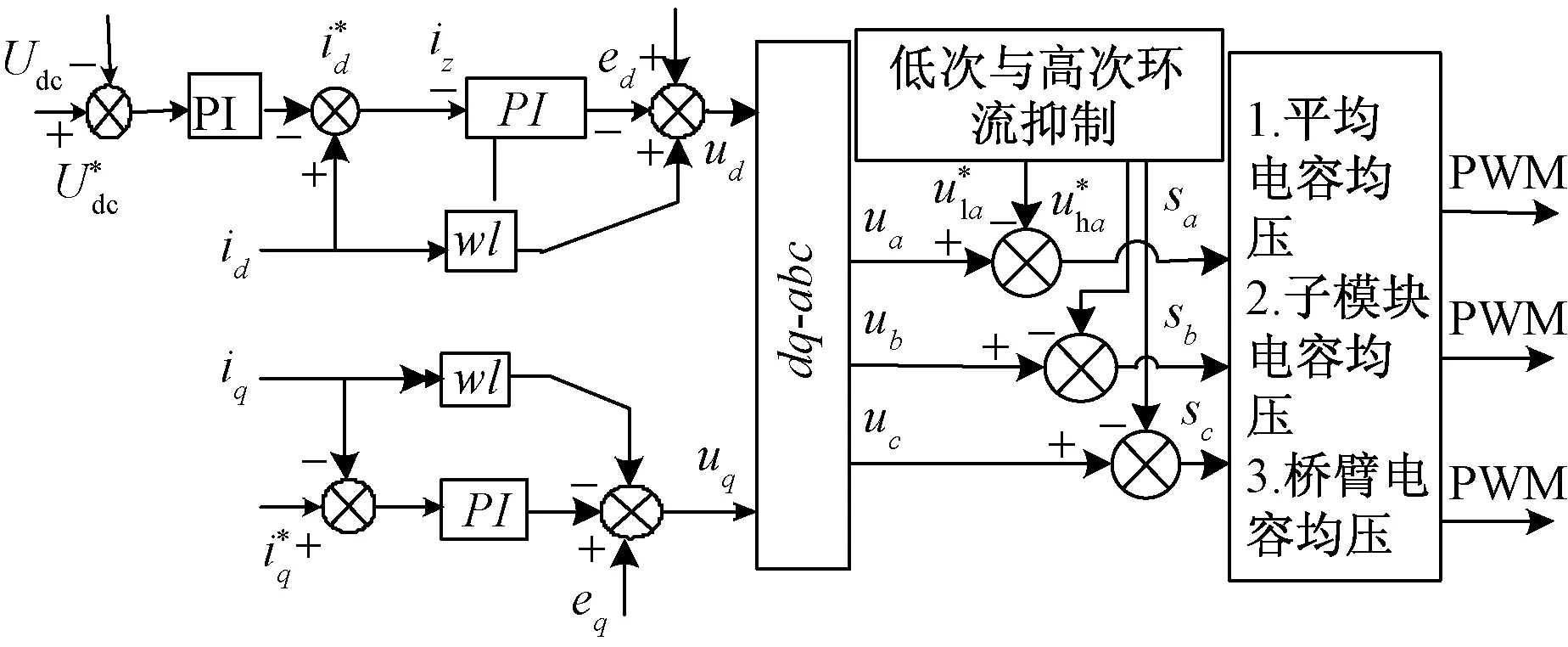
图2 MMC环流抑制系统结构Fig.2 Structure of MMC multiple circulation suppression system
2 MMC内部环流与电容电压波动关系
定义交流测电压调制系数mv,交流测电流调制系数mi,计算式为
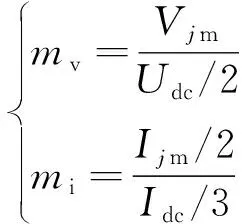
(1)
式(1)中:Vjm、Ijm分别为j相电压、相电流峰值。MMC交流侧输出电压vj和电流ij的基频分量可以描述为
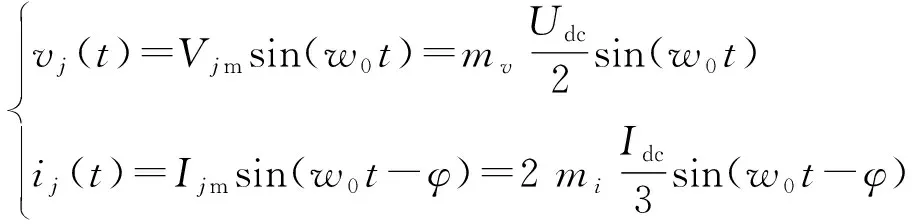
(2)
式(2)中:w0为角频率;φ为功率因数角。将式(2)代入桥臂电压和电流中可以得到以下关系:
(3)
(4)
由于系统元器件功率损耗较小故不予以考虑,因此在系统能量守恒下,系统交直流两侧的有功功率应相等,则直流侧电流Idc推导为

(5)
考虑到MMC中环流对电容电压的影响以及考虑到的环流影响icirj表示为
(6)
式(6)中:in为环流电流中的n次电流谐波。j相上、下桥臂子模块电容瞬时注入功率Ppj、Pnj分别为
(7)
Δvcpj、Δvcnj为上下桥臂电压波动和,则MMC桥臂子模电容电压与直流侧电压和上下桥臂电压vcpj、vcnj关系的可表示为
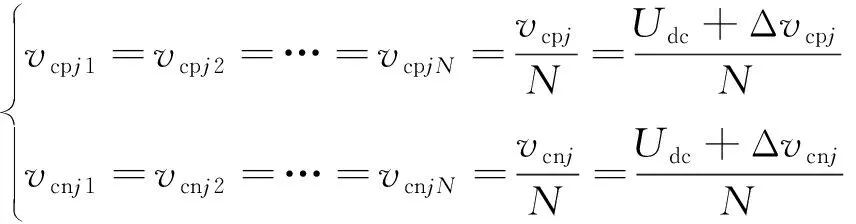
(8)
根据电容能量计算公式,Δvcpj、Δvcnj可表示为
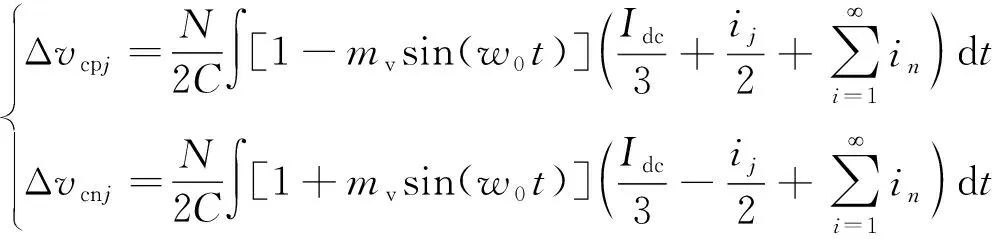
(9)
定义vjh为电流回路的谐波电压,则vjh谐波分析式为

(10)
将式(4)代入到式(9)与式(10)中得到


(11)
由式(11)给出了谐波电压vjh和直流侧电流Idc以及环流icirj之间的关系,在式(11)中得出该结论,即电压侧二次谐波是构成谐波电压vjh的主要部分,且二次谐波是由直流侧电流Idc产生,二次环流是除直流侧电流外,是桥臂电流的主要组成成分,且在式(11)后半部分,直流侧电流Idc导致产生的二次环流谐波将产生4次、6次、8次……等偶次谐波。
3 MMC电容均压基础上的环流抑制器设计
3.1 环流抑制器设计
针对PI控制器和PR控制器在旋转坐标系下只能抑制单一的二倍频环流分量的不足,以及为了更大幅度抑制MMC相间环流中的谐波分量,且由于MMC相间环流中6倍频以上偶次高频环流含量较低。因此为了更好地抑制低频环流分量将3个准比例谐振控制器(QPR)并联组成新的环流抑制器,如图3所示,其中3个并联的准比例QPR的谐振频率依次为电网频率(100π rad/s)2、4、6倍,由于剩余环流中的8倍频及以上的高频环流含量较低,故采用PI控制器进行抑制。
基础PR控制器的传递函数为

(12)
式(12)中:Kri、KP分别为谐振系数、比例参数;nw0为谐振频率。在式(12)分母中加入参数wc,如式(13)所示,可将谐振环节改为准谐振环节。

(13)
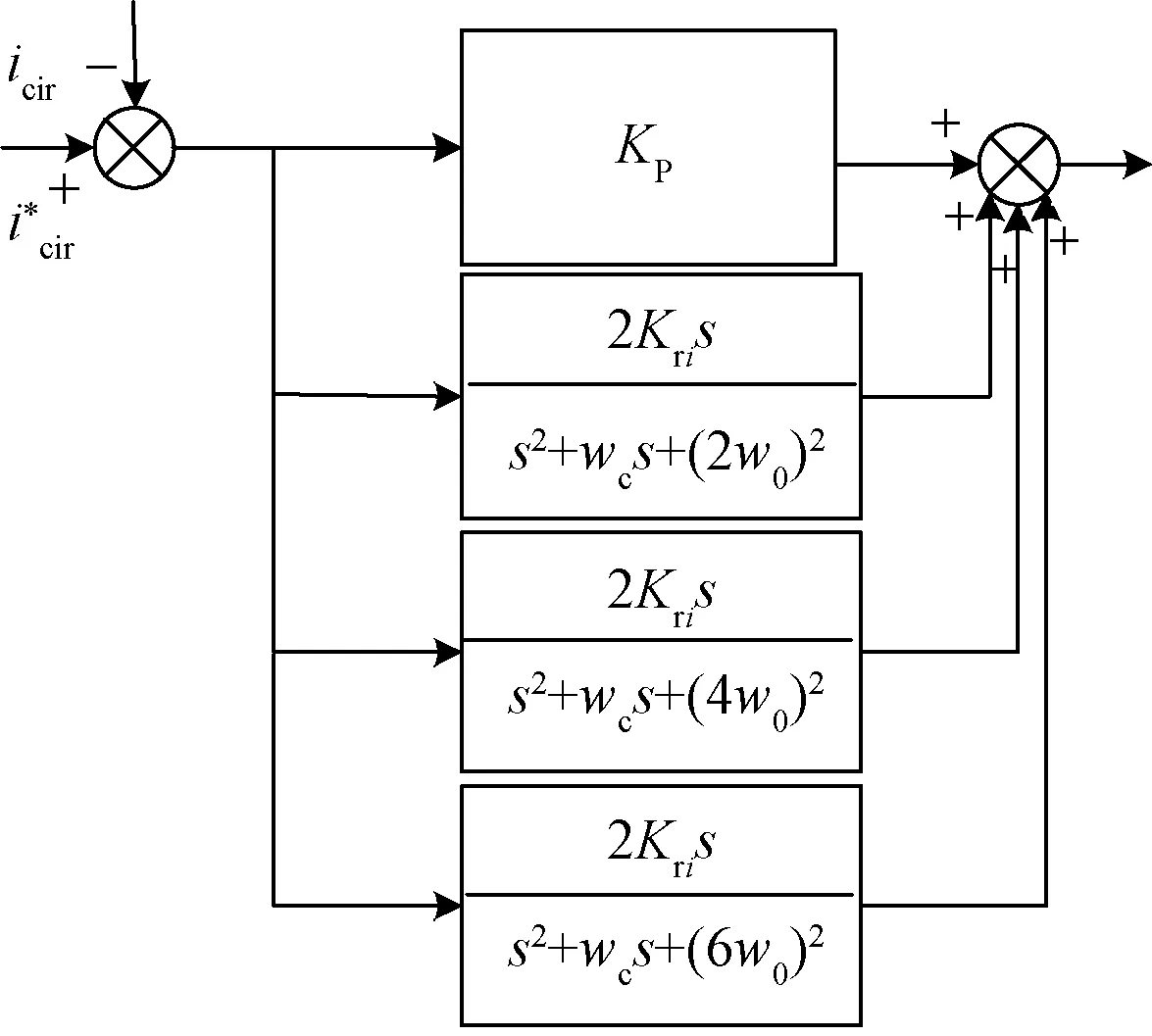
图3 QPR控制器结构框图Fig.3 Structure diagram of ZPR controller
如图4所示,QPR控制器即使谐振增益减小,但其增益值仍然相对较大,且wc越大,谐振带宽就越大,环流抑制系统抗电网频率波动的鲁棒性也越强,但选频特性则会相应降低。因此,应该选择适当的wc,本次设计选择KP=3,Kri=150,w0=100 πrad/s,wc=10 πrad/s。
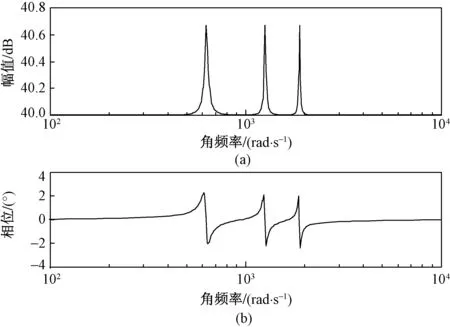
图4 ZPR控制器伯德图Fig.4 Bode diagram of ZPR controller
3.2 高次环流抑制
由于MMC拓扑结构具有严格对称性,因此以a相桥臂为例介绍高次环流抑制策略。首先设计a相子模块电容电压均衡控制,然后在a相均压控制基础上增加高次环流抑制策略。高次环流抑制结构如图5所示。
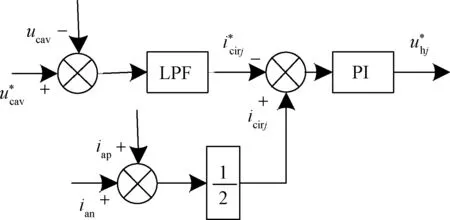
图5 高次环流抑制结构图Fig.5 High order circulation suppression structure
根据上述分析MMC内部中8倍频以上高频环流含量很低,故综合考虑采用PI控制器就能取得较好的控制效果,为了过滤掉MMC中的6倍频及以下环流,即600π rad/s-1以下,故低通滤波器(low pass filter,LPF)截止角频率为600π rad/s-1,MMC子模块平均电压ucav表示为
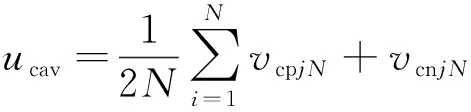
(14)
3.3 低次环流抑制
将并联的3个准比例谐振控制器(QPR)加入MMC子模块电压均衡控制中,实现对环流中2、4、6倍频分量的控制,从而有效地抑制低次环流。以a相为例介绍低次环流抑制策略,低次环流抑制结构图如图6所示。

3.4 桥臂电压均衡控制

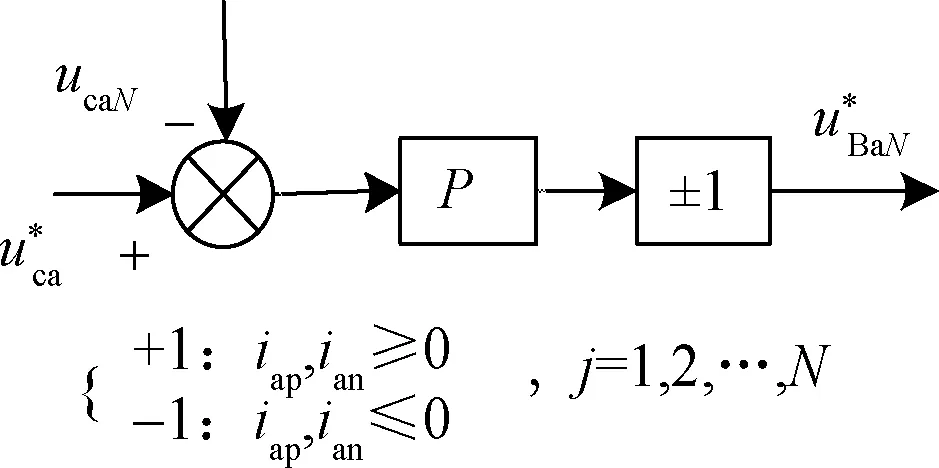
图7 桥臂电压均衡控制结构图Fig.7 Bridge arm voltage equalization control structure diagram
4 仿真验证与分析
为了验证所提出的环流抑制策略的正确有效性,在MATLAB/Simulink中搭建了MMC环流抑制器仿真模型,仿真参数如表1所示。

表1 MMC环流抑制器仿真主要参数
图8(a)、图8(b)分别为a相上桥臂和下桥臂中4个子模块电容电压实际值波动变化曲线,从图8可看到,桥臂中4个子模块的电容电压大小相等且收敛证明了电容均压策略的有效性,在仿真开始时,电容电压波动较大,0.2 s时启动环流抑制器后,各子模块电压波动幅度快速减小稳定在2 250 V附近,子模块电压数值达到相对稳定状态即电容电压的正、负向波动幅值均控制在50 V即2.2%以内,从而保证直流侧母线电压稳定。
图9所示为a相桥臂内部环流,从图9中可以看出,在0.2 s之前未启动环流抑制时,环流在波幅值偏大,在0.2 s时启动环流抑制,环流波动幅度未超过1 A。系统在0.2 s时启动新型环流抑制器后,分析图10与图11可得,相电流不再波动,整体波形平稳,且其多次环流含量仅为1.67%,完美地抑制了相间环流。
5 结论
针对MMC存在的子模块电压不均衡从而引起的相间环流,及现有环流抑制方法不能同时平衡子模块电压波动和抑制相间环流的问题,在MMC子模块电压平衡的基础上,设计了抑制高次与低次环流的QPR并联新型环流抑制器,仿真结果证明验证了该方法的正确有效性,得出以下结论。
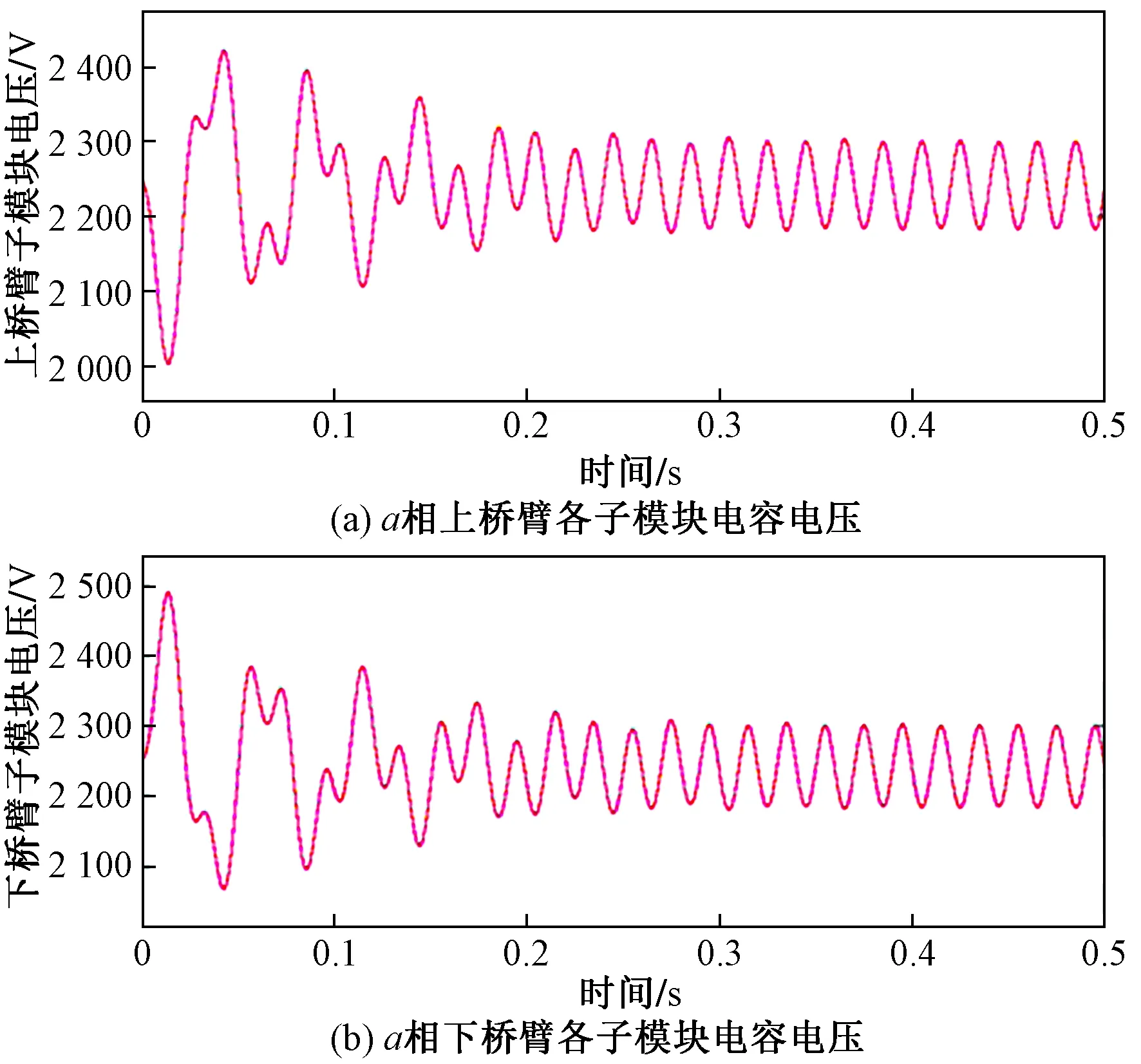
图8 a相桥臂内部各子模块电容电压Fig.8 Capacitor voltage of each sub module in a-phase bridge arm
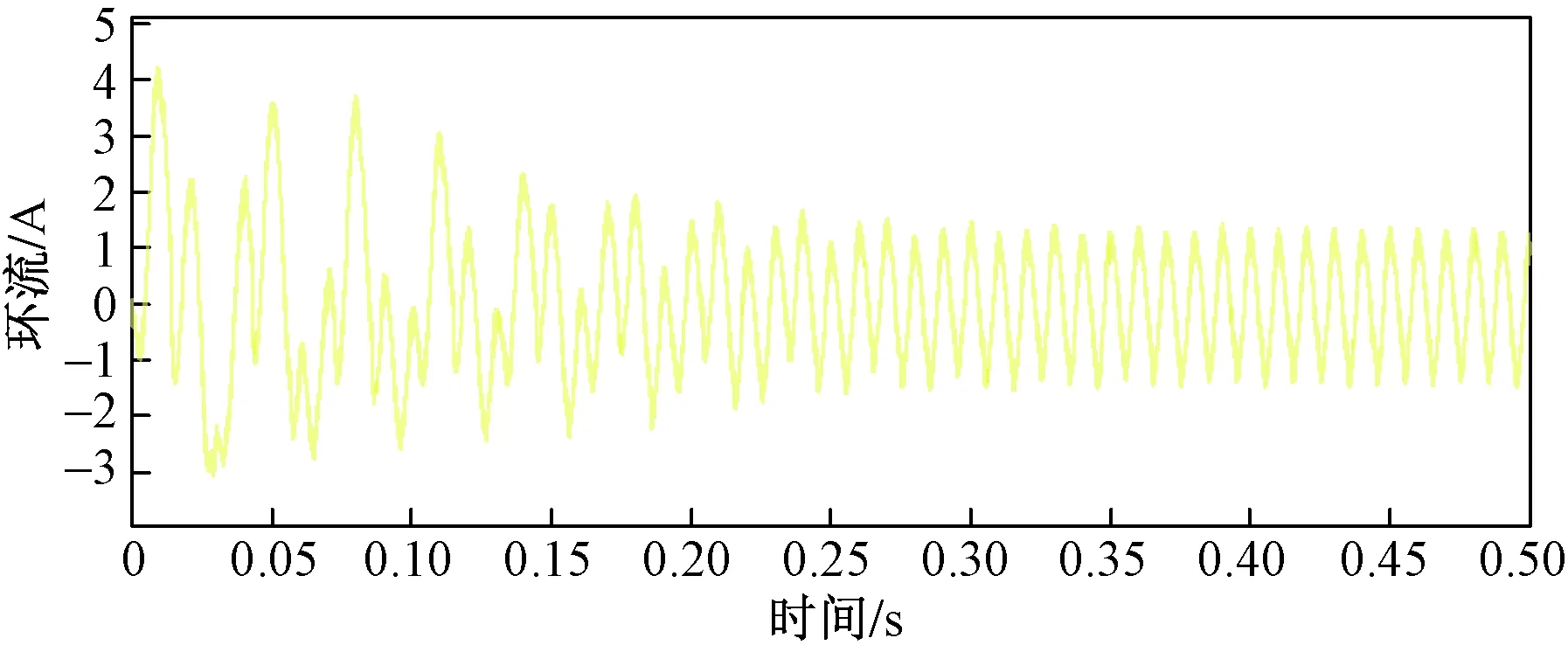
图9 a相桥臂内部环流Fig.9 Internal circulation of phase a bridge arm
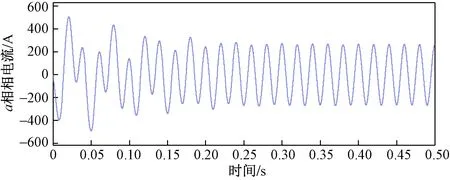
图10 a相相电流Fig.10 a phase current
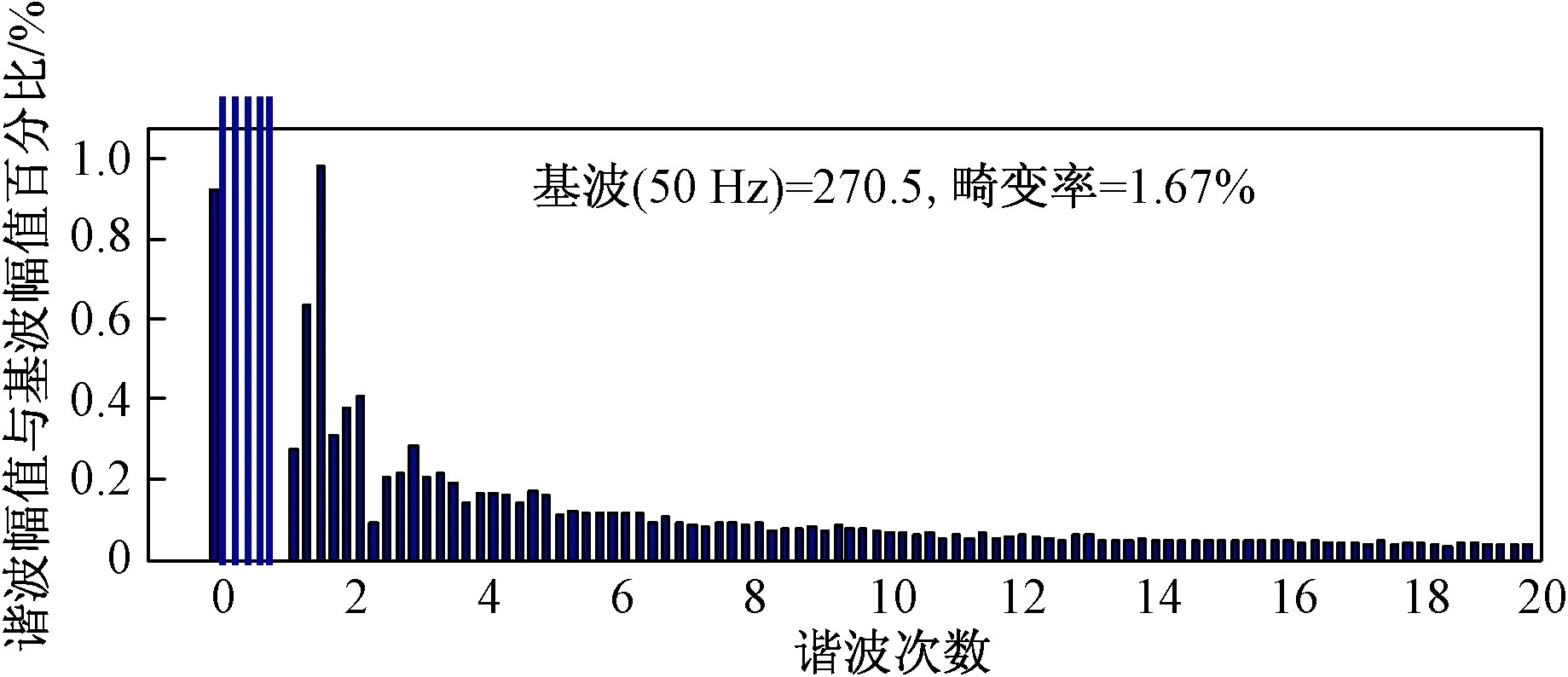
图11 a相电流谐波分析Fig.11 a phase current harmonic analysis
(1)基于MMC电容均压控制的环流抑制策略,能够有效地减少MMC子模块电容电压波动,保持子模块电压稳定在2 250 V附近。
(2)环流抑制策略有效地抑制了相间环流中的高次与低次环流,大大降低了MMC相间环流含量,提高了系统的稳定性,具有一定的工程实用性。
