基于足部运动约束的行人导航方法
2021-04-22黄丽斌赵立业
任 元,黄丽斌,赵立业,丁 姝
基于足部运动约束的行人导航方法
任 元,黄丽斌,赵立业,丁 姝
(东南大学 仪器科学与工程学院,南京 210096)
针对微型惯性测量单元(MIMU)行人导航系统,在卫星信号受限环境中存在定位误差迅速累积的问题,研究了基于足部运动约束的导航误差修正方法。在分析行人步态特征的基础上,构建基于零速修正和足部运动侧向约束组合的足部运动约束模型,进一步对步态周期中的导航误差进行修正。实验结果表明,受行人足部动态过程的影响,未加约束时的导航定位结果存在显著误差,而导航误差修正的方法,将导航终点定位误差的均值提升至行走距离的1.51%,,显著提高了解算精度,能够满足行人导航系统的定位需求。
行人导航;步态分析;零速修正;运动约束
0 引言
行人导航定位信息在日常生活和工作中发挥着日渐重要的作用,极大地提高了生活和工作效率。基于微型惯性测量单元(micro inertial measurement unit, MIMU)的行人导航定位系统,具有成本低、尺寸小、质量轻等特点,在行人导航领域受到广泛关注[1-3]。然而由于MIMU具有精度低、噪声大等缺点,在卫星信号受限的复杂环境中,导航解算误差会迅速累积,为此常采用足部安装传感器的方式,利用零速修正(zero velocity update, ZUPT)对导航解算误差进行修正[4-6]。
目前,已有一些研究人员和学者围绕基于MIMU的行人导航方法开展了富有建设性的研究工作。在零速区间的检测方法研究方面:文献[7]中提出了一种基于多条件约束的零速区间检测算法,与单一的判断条件相比较,多条件组合的检测算法能够显著降低误判概率,在不同步速下均取得了较好的检测结果;文献[8]中提出了一种基于足底压力计辅助的零速区间检测方法,通过对足底压力变化情况的检测来辅助零速区间的检测;文献[9]中提出了一种自适应阈值的零速区间检测方法,通过实验建立了加速度大小和判别阈值之间的关系,可根据运动状态自适应调整零速区间的判别阈值。在多传感器融合的行人导航方法研究方面:文献[10-12]中分别提出了基于超带宽/航迹推算、基于行人航位推算(pedestrian dead reckoning, PDR)/无线保真(wireless fidelity, WiFi)/气压计、基于PDR/WiFi/地磁和基于射频识别(radio frequency identification, RFID)/MIMU的室内行人导航算法,相较于仅依靠惯性器件的导航算法,它们在提高系统定位精度的同时,也使得复杂度增加,并且降低了系统的自主性,使得系统在未知的复杂环境中适用性不高。在行人导航中约束模型的研究方面:文献[13]中研究了基于ZUPT辅助的行人导航算法,实验结果表明,行人导航解算的误差累积速度能够得到有效抑制;文献[14]中提出了一种基于主导航向约束的航向修正算法,取得了较好的修正效果;文献[15-17]中分别构建了一种基于双足MIMU的行人导航系统,通过构建双足间的不等式约束关系对系统的解算结果进行约束。
在不引入其他传感器的前提下,本文在零速修正的基础上,添加足部运动侧向约束,构建针对整个步态周期的足部运动约束模型,进一步提高了行人导航算法的定位精度,并通过相关实验,验证算法的有效性。
1 行人导航算法基本框架
通过足部MIMU,敏感行人运动时足部的加速度和角速度信息,并通过捷联惯导算法,计算得到速度、位置和姿态等信息。捷联惯导解算的基本方程[18]可表述为
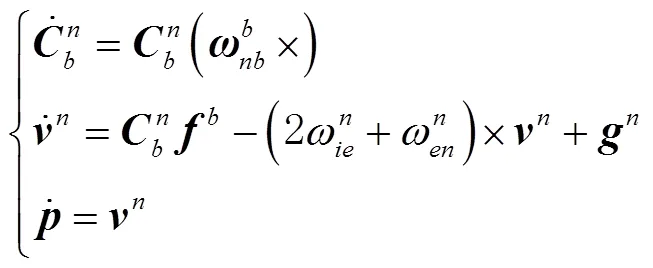
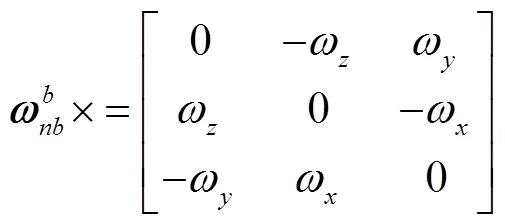
在捷联惯导算法解算的基础上,结合足部运动约束,构成本文的行人导航算法,其算法框图如图1所示。

图1 行人导航算法框图
在利用MIMU器件输出的加速度和角速度信息进行捷联惯导解算的同时,对足部的运动状态进行判别,并根据判别结果选择相应的修正算法:当处于零速区间时,通过零速修正算法进行误差修正;当处于非零速区间时,通过足部侧向约束对误差进行修正。
2 足部运动约束模型构建
2.1 步态分析
在正常行走过程中,从一只脚着地到该只脚再次着地所经历的步态过程称为一个完整的步态周期,运动过程[19]如图2所示。
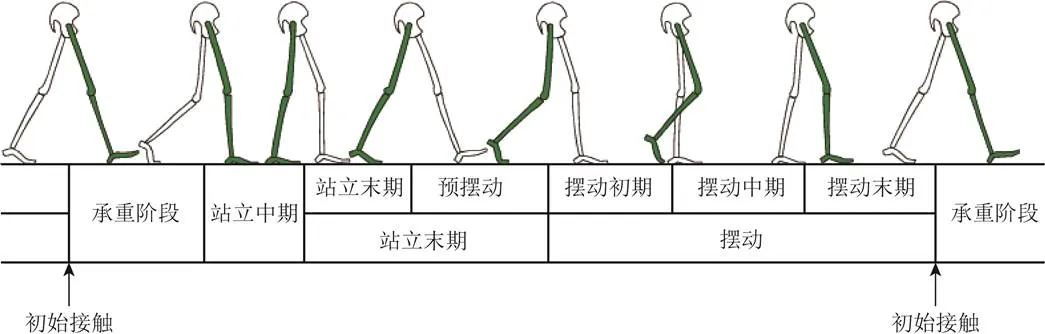
图2 步态周期
步态周期中存在足部与地面保持相对静止的一段时间,将其称为零速区间,在此区间内,足部速度的理论值为零,步态周期内其余部分称为非零速区间,并认为在该期间,足部仅沿脚尖朝向摆动,而无横向运动。行人行走过程中,由于步态的重复性,使得零速区间和非零速区间会交替重复出现,这是基于足部固定MIMU的行人导航系统区别于其他导航系统的显著特征。
2.2 零速检测
基于足部运动约束的修正算法,是建立在步态周期中零速区间与非零速区间准确判别的基础上,因此,零速区间的准确检测是进行导航误差修正的重要前提,对误差的修正效果有着重要影响。采用基于广义似然比检测法,对步态周期中的零速状态进行检测,当滑动窗口内足部固定MIMU输出数据的时间序列满足判别条件时,即为零速状态,判别式[20]为:
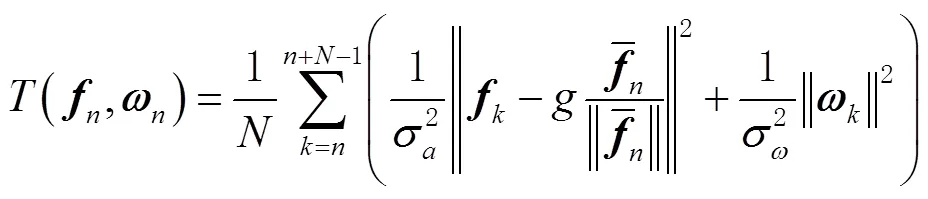
因此,滑动窗口内足部的零速状态检测结果为

行人运动过程中,足部固定MIMU的原始数据及零速检测结果如图3所示。MIMU中加速度计和陀螺仪的原始测量数据分别如图3(a)和图3(b)所示,由于行走过程中步态的重复性,使得MIMU的数据也呈现出相应的周期性,其中数据波动较为平稳基本不变的时间段,即为步态周期中的零速区间。零速区间的检测结果如图3(c)所示,为了便于对照查看零速区间的检测结果,同时给出了足部的俯仰角速率变化曲线,由此可见,步态周期中的零速区间能够被准确检测出来,没有误判和漏判现象的发生,该检测算法能够满足对行人行走过程步态零速区间检测的需求。

图3 传感器原始数据及零速检测结果
2.3 足部运动侧向约束




将式(6)代入式(8)有

根据式(9)即可得足部侧向约束的量测方程。
3 卡尔曼滤波模型构建
将行人足部的运动约束分为两部分:在零速状态时,利用足部的零速条件进行修正;在非零速状态,利用足部运动的侧向约束条件进行修正。这两部分修正方法共同构成了整个步态周期的足部运动约束。为此,需要分别构建卡尔曼滤波模型,实现导航解算误差的修正,其中,导航算法误差方程是建立卡尔曼滤波方程的理论基础,即

系统状态方程的矩阵形式为

式中:为系统噪声矩阵;为15维的系统状态变量,即

系统的状态转移矩阵为

系统量测方程为

式中:为量测噪声矩阵;为量测矩阵。





4 实验验证
为对基于足部运动约束的行人导航方法的性能进行评估,在真实场景下进行了相关实验,选用法国斯伯格(SBG)公司Ellipse2系列传感器,其主要性能参数见表1。将MIMU固定到实验人员的脚背上,安装示意如图4中所示,传感器的采样率设置为100 Hz,并通过数据线将行走过程中采集的数据实时传输到个人计算机中进行显示和存储。

图4 传感器安装方式

表1 传感器主要性能参数
为验证算法的有效性,在参考轨迹为15 m×28 m的矩形闭合路径下进行实验。图5所示轨迹为未修正的纯惯性导航解算结果,考虑到行人运动时足部存在显著的动态过程,相较于一般惯导的车载使用环境,足部惯性器件存在明显的冲击和振动,以及较为频繁的姿态变化,这些原因可能造成了惯导解算精度的急剧下降,导致未修正时的行人导航解算轨迹与参考轨迹存在显著偏差。

图5 未修正的解算结果
基于足部运动约束方法解算得到的行人运动轨迹如图6所示。解算轨迹与参考轨迹基本一致,其终点与起点的定位误差仅为1.09 m,占行走距离的1.27%。说明基于足部运动约束的行人导航算法能够有效地抑制惯导解算误差的累积,行人的运动轨迹得到了较好的复现。
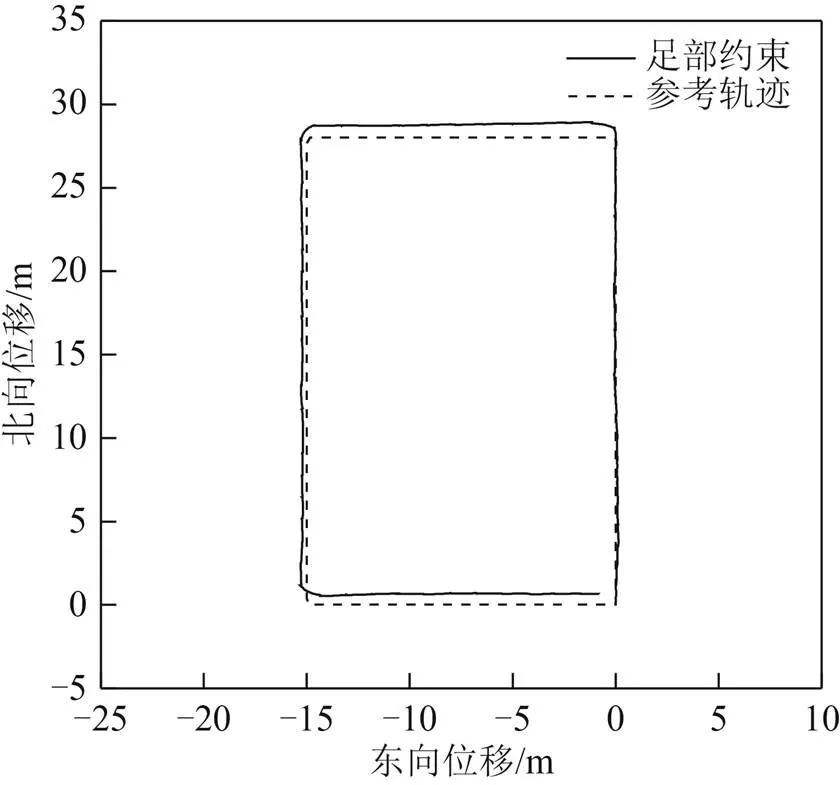
图6 导航解算结果
行走过程中足部速度的变化情况如图7所示,解算出的速度变化曲线很好地呈现了行走过程中的步态特性。
行走过程中传感器姿态角的变化情况如图8所示,俯仰角曲线的周期性变化,反映了行走过程中足部的周期性摆动,横滚角体现了足部的不规则晃动,航向角表示了行人足部的运动方向,以北偏西为正,角度范围为-180°~180°。由于本文实验是沿矩形路径进行的,航向的变化过程较为清晰,主要经历了如下变化过程:0°→90°→ 180°(-180°)→-90°,可将其作为航向角解算结果的参考值。

图7 足部运动速度解算结果

图8 行走过程姿态角解算结果
分别沿着地面上事先画好的大小不同的矩形路线(学校篮球场或排球场中部分区域的边线)进行多次实验,并以解算轨迹的终点与起点之间的距离占总行走距离的百分比,作为解算误差的评价标准,实验结果见表2。表2中86×的含义为:围绕总长为86 m的矩形闭合路径行走了圈,实验10所对应的行人导航解算轨迹如图9所示。

表2 实验结果
实验结果表明,未加约束的行人导航算法解算出的终点位置明显偏离原点,且由于解算过程中漂移方向的变化,导致其终点误差并没有呈现明显的规律,但总体来讲,随着行走距离和时间的延长,误差越来越大;基于足部运动约束的行人导航算法误差的均值为行走距离的1.51%,而未加约束时纯惯导解算的误差均值为行走距离的495.66%,相比而言,足部约束的方法显著提高了行人导航系统的解算精度,能够满足行人导航的定位需求。

图9 导航解算结果
5 结束语
本文研究了基于足部运动约束的行人导航方法,在零速修正的基础上,添加足部运动侧向约束,并分别构建了相应的卡尔曼滤波器,对误差进行修正,从而建立了针对整个步态周期的足部运动约束模型。实验结果表明,基于足部运动约束的行人导航方法的终点定位误差均值为行走距离的1.51%,能够满足行人导航的定位需求。
[1]赵慧, 王斌, 阮巍. 基于MEMS惯性传感器的行人导航轨迹复现研究[J]. 传感器与微系统, 2018, 37(3): 54-57.
[2]徐元, 陈熙源, 王宜敏, 等. 一种采用足部航姿参考和肩部航向参考的室内个人导航方法[J]. 中国惯性技术学报, 2016, 24(3): 325-329.
[3]张苗, 许建新, 黄欣, 等. 基于人体运动学辅助的可穿戴式行人导航系统[J]. 导航与控制, 2018, 17(4): 1-6.
[4]费程羽, 苏中, 李擎. 行人惯性导航零速检测算法[J]. 传感器与微系统, 2016, 35(3): 147-150, 153.
[5]张健敏, 修春娣, 杨威, 等. 一种多运动模式下自适应阈值零速修正算法[J]. 北京航空航天大学学报, 2018, 44(3): 636-644.
[6]孙伟, 丁伟, 李瑞豹. 徒步导航系统中的自适应步态优化检测方法研究[J]. 传感技术学报, 2016, 29(9): 1389-1394.
[7]田晓春, 陈家斌, 韩勇强, 等. 多条件约束的行人导航零速区间检测算法[J]. 中国惯性技术学报, 2016, 24(1): 1-5.
[8]赵小明, 邓芳瑾, 杨松普, 等. 基于压力传感器辅助的行人室内定位零速修正方法[J]. 中国惯性技术学报, 2018, 26(1): 1-5.
[9]ZHANG R, YANG H, HOFLINGER F, et al. Adaptive zero velocity update based on velocity classification for pedestrian tracking[J]. IEEE Sensors Journal, 2017, 17(7): 2137-2145.
[10]仪玉杰, 黄智刚, 苏雨. 一种UWB与PDR融合的行人室内定位方法[J]. 导航定位学报, 2019, 7(3): 38-43.
[11]CHAI W N, CHEN C, EDWAN E, et al. 2D/3D indoor navigation based on multi-sensor assisted pedestrian navigation in Wi-Fi environments[C]//The Institute of Electrical and Electronic Engineers (IEEE). Proceedings of 2012 Ubiquitous Positioning, Indoor Navigation, and Location Based Service (UPINLBS). Palms Springs: IEEE, 2012[2020-06-10].
[12]宋世铭, 王继, 韩李涛. 一种基于改进粒子滤波算法的室内融合定位方法[J]. 导航定位学报, 2020, 8(1): 99-106.
[13]李刘颂, 徐向波. 基于惯性导航的步行者零速检测算法[J]. 传感器与微系统, 2019, 38(3): 154-156.
[14]MUHAMMAD M N, SALCIC Z, WANG K I. Indoor pedestrian tracking using consumer-grade inertial sensors with PZTD heading correction[J]. IEEE Sensors Journal, 2018, 18(12): 5164-5172.
[15]NIU X J, LI Y, KUANG J, et al. Data fusion of dual foot-mounted IMU for pedestrian navigation[J]. IEEE Sensors Journal, 2019, 19(12): 4577-4584.
[16]SHI W, WANG Y, WU Y X. Dual MIMU pedestrian navigation by inequality constraint Kalman filtering[J]. Sensors, 2017, 17(2): 427.
[17]WANG Q Y, CHENG M, NOURELDIN A, et al. Research on the improved method for dual foot-mounted inertial/magnetometer pedestrian positioning based on adaptive inequality constraints Kalman filter algorithm[J]. Measurement, 2019, 135: 189-198.
[18]TIAN X C, CHEN J B, HAN Y Q, et al. A novel zero velocity interval detection algorithm for self-contained pedestrian navigation system with inertial sensors[J]. Sensors, 2016, 16(10): 1578.
[19]RUPPELT J, KRONENWETT N, TROMMER G F. A novel finite state machine based step detection technique for pedestrian navigation systems[C]//The Institute of Electrical and Electronic Engineers (IEEE). Proceedings of 2015 International Conference on Indoor Positioning and Indoor Navigation (IPIN). Palms Springs: IEEE, 2015[2020-06-10].
[20]SKOG I, HANDEL P, NILSSON J O, et al. Zero-velocity detection-an algorithm evaluation[J]. IEEE Transactions on Biomedical Engineering, 2010, 57(11): 2657-2666.
[21]程向红, 赵莹, 田芸. 一种自适应H∞滤波的运动学约束惯性导航方法[J]. 中国惯性技术学报, 2019, 27(3): 295-300.
Research on pedestrian navigation methods based on foot motion constraints
REN Yuan, HUANG Libin, ZHAO Liye, DING Shu
(School of Instrument Science & Engineering, Southeast University, Nanjing 210096, China)
Aiming at the problem that it is easy to rapidly accumulate positioning errors for the pedestrian navigation system based on Micro Inertial Measurement Unit (MIMU) under the condition of Global Navigation Satellite System (GNSS) failure, the paper proposed a navigation error correction method based on foot motion constraint: pedestrian gait characteristics were analyzed; and the foot motion constraint model was established by combining Zero Velocity Update (ZUPT) with the lateral constraint of foot motion; finally the navigation error in the gait cycle was further correctedby establishing Kalman filter model. Experimental resultshowed that: there would be significant error in the navigation and positioning results without constraints due to the influence ofpedestrianfoot dynamics; while the proposed method would increase the average value of navigation and positioning error to 1.51% of the walking distance,which significantly improved the accuracy of calculation, indicating that the method could meet the positioning requirements of pedestrian navigation system.
pedestrian navigation; gait analysis; zero velocity update; motion constraints
P228
A
2095-4999(2021)02-0021-07
任元,黄丽斌,赵立业,等. 基于足部运动约束的行人导航方法[J]. 导航定位学报, 2021, 9(2): 21-27.(REN Yuan, HUANG Libin, ZHAO Liye, et al. Research on pedestrian navigation methods based on foot motion constraints[J].Journal of Navigation and Positioning, 2021, 9(2): 21-27.)
10.16547/j.cnki.10-1096.20210204.
2020-06-22
任元(1994—),男,河南郑州人,硕士研究生,研究方向为行人导航算法。
黄丽斌(1974—),女,江苏南京人,博士,教授,研究方向为微型仪表及微系统技术、组合导航技术。
