不同滤波方法对二维激光雷达点云数据处理的影响*
2021-04-21杜年春沈向前
谢 翔,杜年春,沈向前
(中国有色金属长沙勘察设计研究院有限公司,湖南 长沙 410011)
0 引言
激光扫描仪一般可以分为二维激光扫描仪(即二维激光雷达)和三维激光扫描仪。二维激光雷达的扫描面为一个以激光雷达为中心的扇形,最终得到的是一条曲线上的数据点集。三维激光扫描仪得到的是三维空间内的一个自由曲面上的数据点集。三维激光扫描仪具有扫描范围广、精度高、可对数据进行三维建模等特点,但扫描速度较慢,体积较大。而二维激光雷达以其小巧轻便,测量速度快,精度高等优点在军事、民用领域得到了广泛的应用[1-3]。
二维激光雷达虽然测距精度高,受外界环境影响小,但仍然存在一些问题,主要表现在噪声、离散化误差等。本文主要针对其测量噪声,拟采用多种滤波方式对数据进行预处理,比较其处理效果。
1 二维激光雷达参数及数据结构
本文采用日本北阳公司(HOKUYO)生产的UXM-30LXH-EWA二维激光雷达,外形如图1所示。该二维激光雷达是一个区域扫描的激光传感器,它拥有最大测量距离30 m,190°的测量范围,扫描角度分辨率为0.125°,每次扫描产生1 521个数据。
二维激光雷达扫描导入的数据结构,如表1所示。其每次测量共计1 521个数据点,以激光雷达中轴线划分,左右各涵盖95°范围。

图1 Hokuyo UXM-30LAH-EWA二维激光雷达
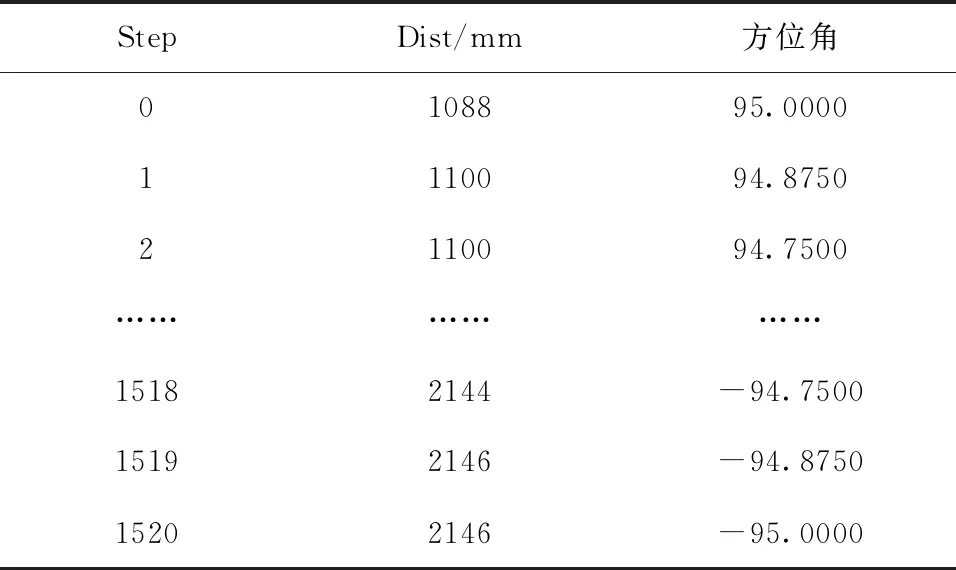
表1 Hokuyo UXM-30LAH-EWA二维激光雷达扫描数据结构
2 滤波方法
2.1 线性最小二乘滤波
最小二乘法[4]是一种数学优化方法,是以误差的平方和最小为准则观测数据估计模型中未知参数的一种基本参数估计方法。它的基本思路是合理的选择估计量使动态或者静态模型,线性或者非线性模型输出与实测输出之差的平方和(即残差的平方和)能达到最小,原理见式(1)。其中,线性最小二乘法是最小二乘法最简单的、也是应用较普遍的一种情况。
(1)

2.2 移动平均滤波
移动平均滤波基于统计规律,将连续的采样数据看成一个长度固定为N的队列,在新的一次测量后,上述队列的首数据去掉,其余N-1个数据依次前移,并将新的采样数据插入,作为新队列的尾;然后对这个队列进行算术运算,并将其结果作为本次测量的结果。
在处理的时候,常用到移动平均滤波器进行去噪,假设输入为x,输出为y,则移动平均滤波器的计算公式为:
(2)
式中:x(n)为第n个输入;y(n)为第n个输出。
2.3 中值滤波
中值滤波[5]是对一个滑动窗口内的诸数值排序,用其中值代替窗口中心元素的原来数值,它是一种非线性的平滑法,它对脉冲干扰级噪声的抑制效果好,在抑制随机噪声的同时能有效保护边缘少受模糊。
中值滤波可以过滤尖峰脉冲,滤波后的数据保留原来的变化趋势同时去除了尖峰脉冲对分析造成的影响。
以一维信号的中值滤波举例。对序列80、120、90、200、100、110、70,如果按大小顺序排列,其结果为70、80、90、100、110、120、200,其中间位置上的值为100,则该序列的中值即为100。一维信号中值滤波实际上就是用中值代替规定位置(一般指原始信号序列中心位置)的信号值。对前面所举的序列而言,中值滤波的结果是用中值100替代序列80、120、90、200、100、110、70中的信号序列中心位置值200,得到的滤波序列就是80、120、90、100、100、110、70。如果在此序列中200是一个噪声信号,则用此方法即可去除这个噪声点。
2.4 Savitzky-Golay滤波
Savitzky-Golay卷积平滑算法[6]是移动平滑算法的改进。Savitzky-Golay滤波器(通常简称为S-G滤波器)最初由Savitzky和Golay于1964年提出。之后被广泛地运用于数据流平滑除噪,是一种在时域内基于局域多项式最小二乘法拟合的滤波方法。用Savitzky Golay方法进行平滑滤波,可以提高光谱的平滑性,并降低噪音的干扰。S-G平滑滤波的效果,随着选取窗宽不同而不同,可以满足多种不同场合的需求。
3 实验结果与分析
在某房间内进行测试,将二维激光雷达架设在距离地面约为1.5 m高度,扫描面垂直于地面,对房间天花板及侧面墙壁进行扫描,所使用的激光雷达为日本北阳公司(HOKUYO)生产的UXM-30LXH-EWA,共计1 521个扫描数据。原始数据图形,如图2所示。
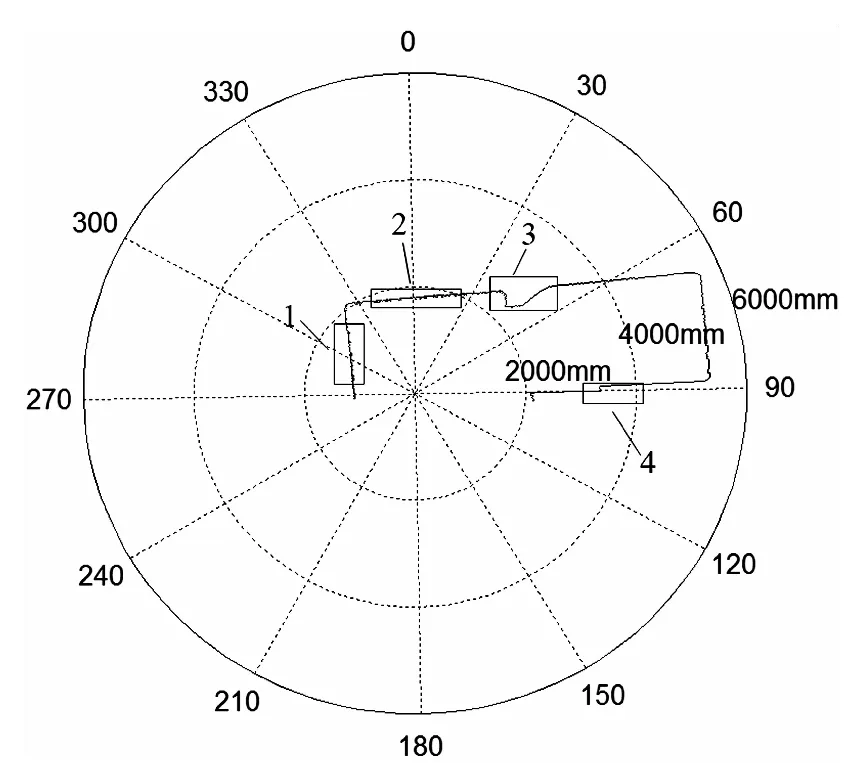
图2 原始数据图形
分别采用线性最小二乘滤波器、移动平均滤波器、中值滤波器、Savitzky-Golay(SG)滤波器对原始数据进行平滑。使用上述4种方法对实验采集的二维点云数据进行滤波处理,将滤波结果与原始数据进行对比,求取各方法的中误差,结果如表2所示。
可以看到,4种滤波方式中中值滤波的效果明显好于其他3种滤波方式,将滤波后的数据与原始数据放在一起,并截取图2中标注有1、2、3、4序号处的具有代表性的图形进行放大比较滤波效果,如图3-6所示。
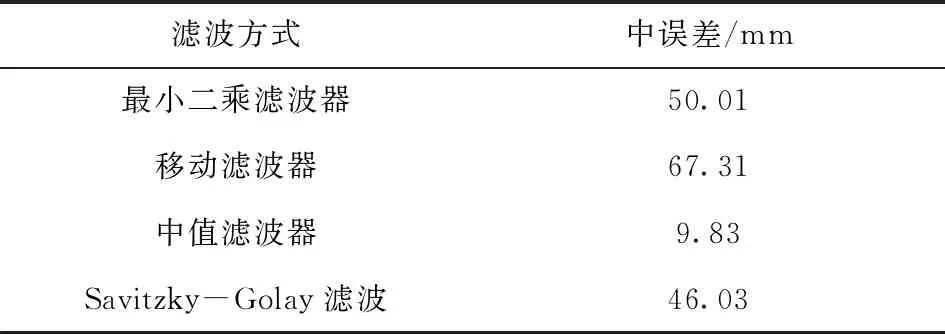
表2 四种滤波方式的中误差比较
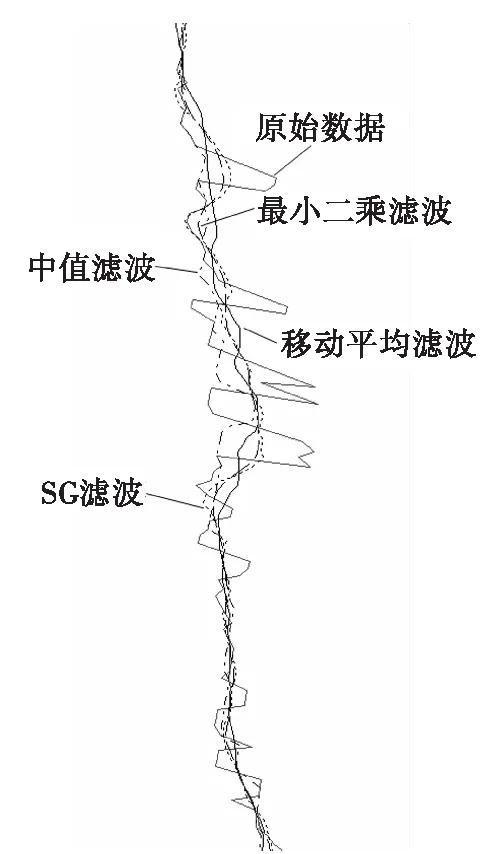
图3 位置1局部放大图

图4 位置2局部放大图
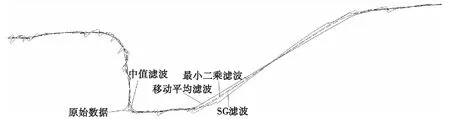
图5 位置3局部放大图

图6 位置4局部放大图
从图3-6中可以看出,本文所采用的4种滤波方式对原始数据均有一定的平滑效果,能够在一定程度上去除系统噪声的影响,使扫描数据更加的贴合实际。对滤波后数据进一步分析可知,导致表2中线性最小二乘滤波器、移动平均滤波器、SG滤波器中误差相对较大的主要数据集中在图6所示的位置,这说明中值滤波对于此特点的数据滤波效果较好。
4 结论
二维激光雷达的数据平滑处理是激光雷达断面建模的重要组成部分,因此本文分析了几种常见的滤波器。通过比较不同滤波方法对原始数据进行降噪滤波的效果,发现对于本文的实验数据,中值滤波能够实现较好的滤波效果。但是由于不同滤波器的原理不同,平滑的效果不尽相同,适用环境也不一样,需要根据实地环境和数据特点选用合适的滤波器。
