车载激光扫描系统在建筑立面测量中的应用
2021-04-21户忠祥韩友美张攀科刘东明王懂懂
户忠祥 韩友美 张攀科 刘东明 王懂懂
(1. 江苏海洋大学 海洋技术与测绘学院, 江苏 连云港 222000; 2. 北京四维远见信息技术有限公司, 北京 100039)
0 引言
随着我国城镇化进程的加快,城市面貌日新月异,与此同时智慧城市建设步伐也在不断推进。建筑物是智慧城市的主体内容之一,其立面测量工作显得尤为重要。另外建筑立面图的需求不断扩大,主要有以下几个方面:城市规划,在原有建筑物基础上进行规划设计的工程实例越来越多,需要快速精确地获取建筑物外立面的数字线划图[1];建筑立面整治,美丽街区设计[2];旧城改造,城市的旧城改造因建筑年久失修及设计图纸缺失,用测绘手段逆向获取建筑立面图纸[3];为规划审批提供现状建筑物立面窗洞的精确位置和尺寸,以进行日照模拟分析[4]等。传统的建筑立面测量方法主要有三种:一是手工测量方法,也就是利用挑杆、挂尺、钢尺、卷尺等配合进行测量,结合草图进行绘图;二是摄影测量的方式,采用近景摄影测量方法进行测量,也就是通过解算数码相机的内、外方位元素,以数字方式存储影像为基础,在计算机上进行内业数据处理,通过计算、平差获取目标空间坐标进行绘图;三是工程测绘方法,即利用全站仪获取建筑物的三维坐标,建筑物外轮廓重要特征点,如窗户、门等,再配合人工手绘的草图,在绘图软件中绘制成图[5]。以上方法存在采集点位信息的工作量较大,人工参与度较高,具有一定的危险性等问题。因此,为了迎合各类需求、提高建筑立面测量效率,有必要探索新的技术方法。
近年来三维激光技术逐步发展起来,其具有实时性、主动性、非接触、面测量的优点,可用来快速获取大量的地物三维信息。目前三维激光扫描测绘系统依据承载平台可划分为星载激光扫描仪、机载激光扫描系统、车载激光扫描系统、地面三维激光扫描系统和手持式激光扫描系统五大类[6]。很多学者将地面三维激光扫描系统运用到建筑物立面测量中去,李婉、黄雪等利用地面三维激光扫描仪对建筑物进行立面测量,坐标系为建筑坐标系[7-8]。张文洪等采用首先进行观测控制网的布设,其次确定扫描站点的方法来获取绝对坐标值[9]。彭劲松采用RTK或全站仪采集测站外部坐标方法进行后续配准拼接坐标转换[10]。但是由于单站的测量范围有限,面对大范围的建筑物外立面测量时,需要多次搬站,大大降低了数据采集效率。
车载激光扫描系统能够快速获得高精度、高密、度大量的目标物三维真实坐标,越来越多的学者研究车载激光扫描系统的应用方向,主要有以下几个方面:道路竣工测量[11]、道路断面采集[12]、地籍测量[13]、城市大型立交桥三维建模[14]。车载激光扫描系统通过载体的移动能够快速获取大面积点云,点云数据成果为绝对坐标系,无须站间拼接,往返扫描补充遮挡缺失区域。本文采用北京四维远见信息技术有限公司自主研发的SSW车载激光建模测量系统设计了建筑物立面测量技术方案,并用实验对其进行了验证。
1 车载激光扫描系统组成及工作原理
车载激光扫描系统由车载平台、激光扫描仪、全球定位系统(Global Navigation Satellite System,GNSS)、惯性测量单元(Inertial Measurement Unit,IMU)、里程计(Distance Measuring Instruments,DMI)、纹理采集系统、控制系统、电源系统等构成[15]。

(1)
其中,α、β分别为激光扫描仪内部的激光反射镜在水平方向的旋转角度和在竖直方向的旋转角度。
绝对坐标的测量是由GNSS、IMU和里程计信息实现,利用GNSS对系统进行初始定位,IMU进行初始对准,获得开始测量时的系统准确的坐标和姿态,结合GNSS、IMU和里程计的组合导航获取激光扫描仪的准确坐标,再加上以激光扫描仪为中心的局部坐标系,通过坐标轴的旋转变换从而实现目标反射点的绝对坐标计算。
目标物的表面纹理信息由相机进行采集,同时还会有一个相机的曝光返回时间,用来记录像机曝光时刻的时间,通过和轨迹结合计算出外方位元素[15],以便于后期对目标物进行纹理匹配。
以上所有的传感器都是通过时间同步控制器触发脉冲实现数据的同步采集,车载上方的平台将所有传感器固定在一起,这样就保证了传感器与平台之间的姿态是同步的,各传感器之间的坐标关系就可以确定。各传感器之间的相对位置关系与姿态,即它们的相对外方位元素的测定是由外业扫描检校场来完成的。
2 车载激光扫描建筑物立面测量方案设计
基于车载激光扫描系统特点,设计了建筑物立面测量的技术方案如图1所示。
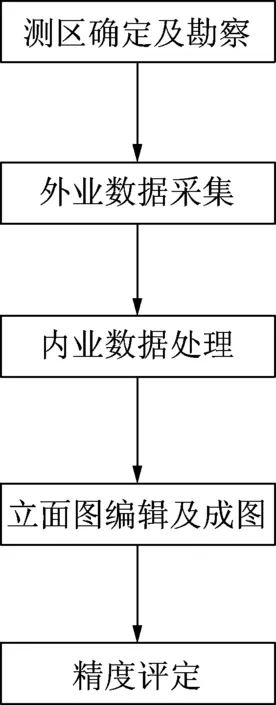
图1 车载激光扫描建筑物立面测量技术方案
2.1 测区确定及勘察
首先明确数据采集的范围,即确定测区。其次车辆在进行外业数据采集时,可能因为一些意外的道路交通情况而影响行驶路线和采集范围,进而影响作业有效率,所以在开展车载测量之前有必要对测区进行初步地勘察,勘察可采用实地勘察或地图观察,以便于确定正式作业时的行驶路线。
2.2 外业数据获取
外业数据采集是车载系统到达测区后,架设GNSS基站,选择附近无高大树木与建筑物的空旷地带进行初始化,主要为GNSS定位与IMU地对准,初始化之前通过控制软件设置各项传感器的采集参数,如激光扫描的设置参数有脉冲发射频率等。初始化工作结束后,按照设计好的行车路线进行扫描作业。
对于道路两侧树木遮挡严重的地区可以采用大车先扫描,小车后补扫的方法进行,即大车按正常作业扫描之后,再把扫描测量设备固定在小的移动平台上,如电动三轮车,小车在人行道上行驶进行补扫,能达到扫描范围的最大覆盖。
扫描作业完成后,同样选择GNSS信号干扰少的地点进行结束化,将采集的原始数据拷贝到电脑计算机内,方便后续内业处理。
2.3 内业数据处理
内业数据处理时,首先需要将原始数据如GNSS数据、IMU数据、里程计数据、相机照片、激光数据等进行预处理,主要是解码与转换格式,预处理结束之后使用商业软件IE(Inertial Explorer)将里程计数据、IMU数据、GNSS数据进行组合导航解算,生成行车采集的轨迹信息。最后将激光点云数据与组合导航解算结果进行融合,得到有位置和姿态信息的点云数据,实现点云坐标的重新定位和赋值。
在点云工作站内加载融合后的点云数据,进行点云的去噪,主要是过滤掉空气中的噪声点等。一个比较简单常用的方法就是移除离群点,根据空间点半径范围邻近点数量来滤波,在点云数据中,设定每个点一定半径范围内周围至少有足够多的近邻,不满足就会被删除。
2.4 立面图编辑与成图
进行立面图编辑时,选择合适视角建立辅助面,在辅助面上进行矢量编辑,确保所有矢量都在一个立面上,空间中的点云投影到立面的原理如下:
已知空间中三个点P1(x1,y1,z1),P2(x2,y2,z2),P3(x3,y3,z3),能够唯一确定一个空间平面方程Ax+By+Cz+D=0,其中:
(2)

(3)
(4)
将(3)、(4)两个式子代入平面方程Ax+By+Cz+D=0,可以解得:
(5)
从而可以解得
(6)
(7)
由此得到空间三维点P0(x0,y0,z0)在平面内的投影坐标P(xp,yp,zp)。

(8)
解得
(9)
由此得到旋转后的水平面坐标(x′,y′,0)。
立面编辑完成之后将其旋转至水平面,在点云处理软件中导出DXF格式加载到CAD中显示,最终成图。
2.5 精度评定
外业作业时,实地用手持激光测距仪量测一些门窗的长度,并在绘制的立面图中选择同样门窗位置进行量取,以便对立面图成果进行精度评定。
3 车载扫描实验
本次实验采集的区域为山西右玉县玉林东西街,长约2.5 km,采集道路两侧的建筑物立面信息,测区范围为城市道路,地形平坦、沿路方向通视良好,但道路两侧有机动车辆停放,对三维扫描测量有一定影响。
本次实验采用的是RIGEL VUX-1HA激光扫描仪,激光脉冲发射频率最大1 000 kHz,激光扫描线频最大250 Hz,最大测程为420 m,目标反射率80%,视场范围360°,测量精度能够达到5 mm。整个测量外业包括系统初始化和结束化时间,共用时2 h,外业采集结束后,将相关采集的原始数据拷贝到电脑计算机内,为内业数据处理做准备。
对外业采集数据进行处理,组合导航生成车行扫描轨迹,再利用点云生产软件将激光原始数据与轨迹数据进行融合生成点云数据,内业数据解算共用时3 h。在SSW车载激光建模测量系统配套的SWDY点云工作站中将融合后的点云数据加载显示,图2与图3分别为点云图和建筑物影像图。

图2 点云图

图3 建筑物影像图
在点云工作站进行人机交互的矢量编辑。建立辅助面图层,以确保所画的图形都在一个立面上,每个人的立面矢量编辑作业效率为300 m/d,编辑完成之后选择处理软件的立面矢量旋转到水平面功能进行投影,得到二维的建筑物立面图。导出DXF格式到AutoCAD中加载显示。
博世GLM7000手持激光测距仪的测量精度为1.5 mm,用其对一些门、窗等结构进行丈量并与立面图中门窗的量取值做比较,对比结果如表1所示。

表1 建筑物立面测量精度
从抽样结果可以看出窗户的量测精度相对偏低,分析原因是点云采集时,由于玻璃材质对点云的反射产生了干扰,还有人工选取门窗角点附近最近的点云带来的误差,进而影响立面图的绘制。总体而言平均偏差在36 mm左右。
4 结束语
本文尝试将车载激光扫描系统运用到建筑物外立面的测绘工作中,设计了一套高效的立面图测绘方法。该方法充分借助车载激光扫描系统的移动速度快、获取点云信息量大、无须站间拼接的优势,大大节省了外业作业时间,提高了建筑物立面图的测绘效率,同时改善了测量人员的工作环境,减轻外业人员劳动强度。内业方面,研究了立面图绘制的原理,结合车载激光扫描系统SSW的后处理软件,人机交互地完成了基于激光点云数据快速绘制建筑立面图,数据处理自动化程度高,建筑物立面测量精度较高,立面图绘制成图人机交互环境友好。本文提出的建筑物立面测量的实施技术方案,通过实验验证了此方案的可行性与高效性,对于得到的建筑物外立面图,后续可用于制作BIM模型等其他用途。同时本文的研究也为车载激光扫描系统的广泛应用提供了参考,并对相关项目实施有一定的借鉴意义。