不同无人机航测影像处理方案效果对比
2021-04-21刘志军孔祥峰
刘志军 孔祥峰
(浙江有色勘测规划设计有限公司, 浙江 绍兴 312000)
0 引言
无人机航空摄影技术在近年来得到了较快的发展,随着智能、智慧以及大数据的不断发展,对测绘行业也提出了新的要求,传统的航空摄影测量在技术和应用领域均存在局限性,因此发展无人机智能测绘成为当下的发展潮流[1-4]。
传统的无人机航空摄影通常采用地面像控点辅助影像空三解算方式进行建模,但是需要在野外布设大量的像控点才能保证足够的影像处理精度,将会大大降低测绘工作效率。而无人机搭载POS进行定位时的精度往往难以满足高精度直接地理定位的相关要求,建立的模型存在明显的偏差[5-7]。为了提升机载POS数据影像处理精度,达到免像控或者少像控点的目的,减少对人力和资源的消耗,近年来基于GNSS(全球卫星导航定位系统, Global Navigation Satellite System,GNSS) CORS和POS技术的摄影测量方法逐渐发展起来[8-10],但是该方法受CORS基站信号影像较大,有时仍然难以满足相关精度要求,因此,有必要对无人机航测影像处理方案进行探讨。
本文基于无人机航空影像摄影技术,对比分析了6种不同无人机航测影像处理方案的效果,能够更快速高效地满足智慧城市建设需要的高精度地理信息产品。
1 试验概况
1.1 研究区概况
研究区面积约为460 km2,区域内以平原为主,平原海拔30~50 m,同时存在少量的丘陵地带,丘陵海拔高度未超过200 m,整个地势呈西北高东南低。
1.2 航测参数
数码航摄仪采用UCE M3 f100,所采集的地面数据成果分辨率为0.04 m,同时具有高精度POS定姿信息,旁向重叠度和航向重叠度分别为38~44%和66~70%,一条航线的最大和最小飞行航摄之差应≤30 m,实际航高与预设航高的差值应≤5%,倾斜角和旋偏角应分别不大于2°和8°,航线的弯曲度应≤1%,航摄时间选择在天气晴朗无云无风的时间段进行,以保证影像的清晰度和饱满度。
具体的航摄因子为:摄影比例尺1∶10 000,焦距100 mm,像元大小4 μ,幅面大小为26 460×26 460,相对航高1 000 m,绝对航高1 050 m,基准面Qy为40%,航线间隔Dy为635 m,基准面Px为67%,基线Bx为170 m,航线长度为886 km,航线数量为33条,航片数量为3 995张,基准面比例尺为1∶10 000,南北覆盖因子为50%,东西覆盖因子为3条基线。
2 影像处理方案
影像处理方案主要分为三类:一是单独控制点影像处理;二是免像控点影像处理;三是优化POS结合控制点处理。具体方案设置情况见表1。
2.1 单独控制点影像处理
地面像控点是航测影像控制加密和测图的基础,能够提高航测影像精度的作用,通过在影像显著点、拐角点、固定物或者十字相交并且具有明显界限的物体上布设像控点,并将采集好的像控点数据导入Smart3D 软件,经影像校正、模型制作和影像处理等过程,再通过空三解算和模型输出,在只有像控带点平差情况下,对检查点的模型坐标进行精度检验。本文在航摄影像数据基础上,选择30个点作为像控点,并另外选取30个点作为地面检查点。
2.2 免像控点影像处理
免像控处理是在机载POS数据基础上,根据研究区与不同CORS基站的距离以及整周模糊度固定率大小对POS数据进行优化处理(GNSS差分处理),获得外方位元素,然后进行影像处理和立体建模,最终在模型影像中选择地物点作为检查点进行实测,并计算模型坐标值与实测坐标值的误差,得到不同处理方案的精度。在研究区附近共有三个不同的CORS基站(编号分别为A、B、C),距离研究区的距离分别为26 km,10 km和2 km,模糊度固定率分别为58.8%、
91.7%和97%。免像控点影像处理方案共设置四种:(1)基于原始机载POS数据的模型构建;(2)基于ACORS基站优化POS数据模型构建;(3)基于BCORS基站优化POS数据模型构建;(4)基于B-CCORS多基站优化POS数据模型构建。每种处理方案均选择60个检查点进行精度检验。
2.3 优化POS结合控制点处理
在基于B-CCORS多基站优化POS数据基础上,利用少量的地面控制点(本文选择3个控制点且三个控制点在研究区内呈三角均匀分布)进行影像处理和建模,然后另外选择30个检查点进行精度检验。
3 效果对比
3.1 检查点坐标与模型坐标差值
试验得到的不同航空影像处理方案下的模型坐标值与检查点坐标值之间的误差(Δx、Δy和Δh)情况见表2。从表中可以看到:在单独控制点影像处理方案下,点数30个,Δx、Δy和Δh的最大值分别为0.075、0.108和0.208 m,最小值分别为0.003、0和0.01 m;在原始POS数据影像处理方案下,点数60个,Δx、Δy和Δh的最大值分别为5.403、7.051和8.727 m,最小值分别为0.03、0.045和3.082 m;在ACORS基站优化 POS数据影像处理方案下,点数60个,Δx、Δy和Δh的最大值分别为2.056、2.041和1.487 m,最小值分别为0.006、0.025和0.013 m;在BCORS基站优化POS数据影像处理方案下,点数60个,Δx、Δy和Δh的最大值分别为0.686、0.660和1.190 m,最小值分别为0.341、0.097和0.352 m;在B-CCORS多基站优化POS数据影像处理方案下,点数30个,Δx、Δy和Δh的最大值分别为1.108、0.873和1.799 m,最小值分别为0.022、0.016和0.016 m;在B-CCORS多基站优化POS数据+3控制点影像处理方案下,点数30个,Δx、Δy和Δh的最大值分别为0.155、0.141和0.878 m,最小值分别为0.004、0.001和0.012 m。从6种影像处理方案的坐标差值来看,使用单独控制点影像处理方案的坐标误差最小,其次为多基站优化POS数据+3控制点影像处理方案,采用原始POS数据影像处理方案时的坐标误差值最大。

表1 不同影像处理方案

表2 不同影像处理方案下坐标误差情况 单位:m
3.2 精度评定
不同处理方案下的地物点坐标精度情况见图1。从图中可以看到,方案二(原始POS数据)的平面中误差和高程中误差最大,分别达到4.043和5.992 m,方案一(单独控制点)的平面中误差和高程中误差最小,分别为0.059和0.108 m。根据GB/T 7930—2008《1∶500 1∶1 000 1∶2 000地形图航空摄影测量内业规范》的相关规定,在不同比例尺下的地物点平面和高程精度误差限制情况见表3。结合图1和表3数据可知,单独像控点影像处理方案下的平面和高程精度满足1∶500大比例尺精度要求,当采用原始POS数据和ACORS基站优化POS数据影像处理方案时,不能满足相关规范要求,当采用距离较近和模糊固定率较高的BCORS基站优化POS数据影像处理方案时,基本满足1∶2 000比例尺精度要求,当采用B-CCORS多基站优化POS数据影像处理方案时,满足1∶1 000比例尺精度要求,当采用多基站POS优化数据+3控制点影像处理方案时,满足1∶500比例尺精度要求。
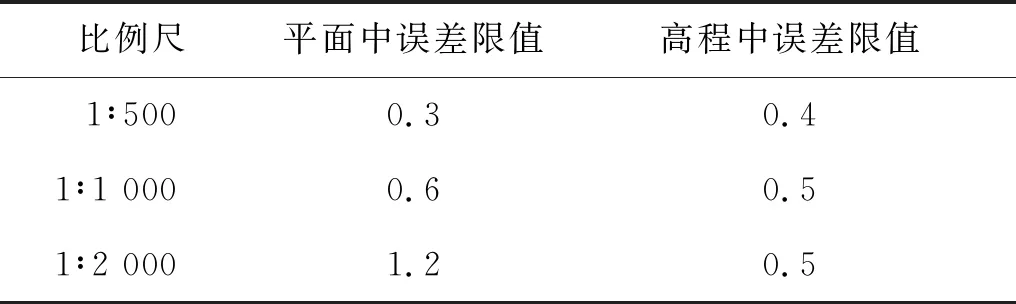
表3 不同比例尺地物点的中误差限值 单位:m

图1 不同影像处理方案精度分析结果
3.3 讨论
从整体效果来讲:利用机载POS数据、GNSS不等距离单基准站和多基准站优化的POS数据影像处理方案的精度不如控制点影像处理方案的精度,这主要是因为机载POS系统与测量相机的位置本身存在一定的高程偏差,因而在影像处理过程中会产生一定的系统误差,同时在低飞行高度时,机载POS系统信号容易受到外界环境的干扰,因而也会造成一定的偏差。当采用CORS基站优化POS数据进行建模时,距离越近和模糊固定率较高的处理方案精度更佳,多基准CORS基站优化POS数据的处理效果优于单基准CORS基站优化POS数据的处理效果。基于多基准CORS基站优化POS数据+3控制点影像处理方案的精度与单独控制点影像处理的方案的精度基本相当,而且,可以很大程度上减轻外业作业像控点的布设工作量,对于提高整体的航测工作效率具有重要意义,当设备及环境条件允许时,推荐使用此方案进行无人机航测影像处理。
4 结束语
通过对6种不同无人机影像处理方案的误差和精度对比,得出以下几个结论:
(1)利用机载POS数据或者CORS基站优化POS数据进行影像数据处理时的精度不如控制点影像处理方案的精度。
(2)距离越近和模糊固定率越高的CORS基站优化POS数据影像数据处理精度越好,多基准CORS基站优化POS数据的处理效果优于单基准CORS基站优化POS数据的处理效果。
(3)单独控制点和多基准CORS基站优化POS数据+3控制点处理方案的精度满足1∶500比例尺精度要求,BCORS基站优化POS数据处理方案精度满足1∶2 000比例尺精度要求,B-CCORS多基站优化POS数据影像处理方案精度满足1∶1 000比例尺精度要求。
(4)在设备和环境条件允许下,推荐采用(单)多CORS基站优化POS数据结合控制点方式进行影像处理。
