基于交通信息的电动汽车制动策略及仿真
2021-04-20董振鹏祖炳锋周建伟徐佳晨
董振鹏,祖炳锋*,周建伟,徐佳晨
(1.天津大学 内燃机研究所,天津 300072,中国;2.天津大学 机械工程学院,天津 300072,中国;3.天津特瑞捷动力科技有限公司,天津 300072,中国)
随着“ V2X ”(“车辆与万物”,vehicle to everything)等交通通信技术的发展,以及车载雷达等传感器的普及,汽车可以更好地感知环境,获取当前及未来的路况信息,做出更加正确的决策和控制[1],在满足驾驶性的同时,提高其经济性与安全性。在高等级自动驾驶全面应用之前,利用路况信息辅助驾驶员安全、舒适、经济地驾驶具有重要意义。对于制动领域,在满足驾驶员操纵意图的基础上,利用路况信息提高新能源汽车的主动安全性与能量回收经济性备受关注。根据驾驶员是否踩制动踏板,可将车辆制动分为滑行制动和踏板制动。
汽车在市区拥堵道路行驶需要频繁制动,制动过程消耗能量约占直接驱动汽车行驶总能量的30%~50%[2],提高滑行制动强度,能减少驾驶员频繁踩制动踏板的疲劳感,增强能量回收效果;在高速工况行驶时,放松加速踏板后的较短时间内又会提高汽车驱动力来恢复车速,如果滑行回收强度过大,将导致能量转化损失增加,也不利于电动汽车的经济性。所以,滑行回收强度应根据交通状况确定。国外已有部分量产车型实现该功能,保时捷Taycan、奥迪e-tron等在自动回收模式能够根据路况确定滑行回收强度。在国内的相关研究中,主要利用电机模拟发动机的倒拖进行滑行回收[3-4],并未实现滑行能量回收的最大潜力。
汽车纵向预警和避撞系统(collision warning and avoidance, CW/CA)通过传感信息对车辆碰撞危险程度进行判断,提供碰撞危险警示以及主动避撞措施。安全距离算法利用行车信息单元反馈的本车与前方车辆或障碍物之间的间距,与安全距离模型计算出的理论间距进行比较,判断当前是否安全[5]。有关学者相继提出了MAZDA 模型、HONDA模型、Jaguar 模型和NHSTA 模型等安全距离模型[6-7],以及考虑路面附着系数的安全预警算法[8-9]。但上述模型算法对前车的减速状态未进行充分考虑,大多默认前车以最大减速度制动,不符合实际驾驶情况,造成道路通过性降低。
本文针对网联技术以及车载传感器的快速发展,提出了将路况信息与踏板意图融合的制动策略。由交通拥堵程度及限速信息确定滑行能量回收强度,基于路面及雷达信息制定安全距离算法。利用碰撞预警信息对踏板制动和滑行制动强度进行修正,降低自动避撞系统的触发概率,减小由此带来的制动冲击。最后通过仿真验证策略的准确性。
1 基于交通状况的滑行强度识别
当电机有制动回收能力,在滑行过程中电动汽车可回收最大能量为
式中:ΔEk为汽车损失的动能;v为车速;F为行驶阻力;m为汽车质量;v1、v2为滑行前后的车速。
当行驶道路的坡度没有变化时,若令滚动阻力为Ff,空气阻力为Fw,g为重力加速度;f为滚动阻力因数;CD为空气阻力因数;ρ为空气密度;A为车辆迎风面积;v为无风时车辆的行驶速度,则行驶阻力为

在滑行过程中,电池能够储存的能量为

式中:ηt1为车辆传动系的平均机械效率;ηm1为电机的平均发电效率;ηbat1为电池的充电效率。
滑行过后,车辆需重新驱动恢复到原车速时,车辆恢复到原状态需要的净能量为

车辆恢复到原状态时,电池需提供的能量为

式中:ηt2、ηm2分别为驱动过程传动系、电机的平均机械效率;ηbat2为电池的平均放电效率。在滑行和驱动的整个过程中,电池消耗的净能量为

因为滑行和驱动的平均效率可认为近似相等,所以从电池到车轮端能量传输总效率为

从而,式(7)可化为

由式(9)可知,汽车在滑行过程中损失的动能越大,即电机滑行制动的强度越大,汽车重新恢复原车速时,电池消耗的净能量越大。当电机滑行制动强度为0时,即:

重新恢复到原车速,电池消耗的净能量最小,从滑行开始到恢复原车速电池消耗的最小净能量为

驾驶员放松加速踏板滑行,有不同的意图:若为减速停车意图,如在拥堵道路或超速情况下滑行,保证驾驶的安全性为第一目的,不考虑全局经济性;若减速意图较弱,如在畅通道路上放松加速踏板缓解疲劳,应考虑滑行的全局经济性。
通过导航系统及其他V2X设备,可以便捷地获取当前的交通信息。随交通情况变化,在闹市区应增大滑行强度;在高速路应减小滑行强度;超过当前及前方路面限速,完全放松加速踏板后,应增大滑行强度。本文设定:可以从通讯设备实时地获取交通状况和限速信息,将交通拥堵状况分为市区(拥堵)、市郊(中低速)、高速(畅通)3种。
若令v代表当前车速,vL代表当前或未来路段的限速,则超速因子为

当β≤ 0 时,未超速;0 <β≤ 0.1 时,超速小;β >0.1时,超速大。超速时,触发超速警示,提醒驾驶员放松加速踏板或进行制动减速。
将滑行制动强度分为1—4级,各等级下的电机制动力矩(Tm)如图1所示。1级滑行不进行制动, 2—4级下的制动力矩随车速增加而增大;相同车速下,各级制动力矩依次增大,其中2级滑行模拟发动机倒拖制动。由超速因子β和交通信息确定的滑行制动强度等级分类规则见表1。
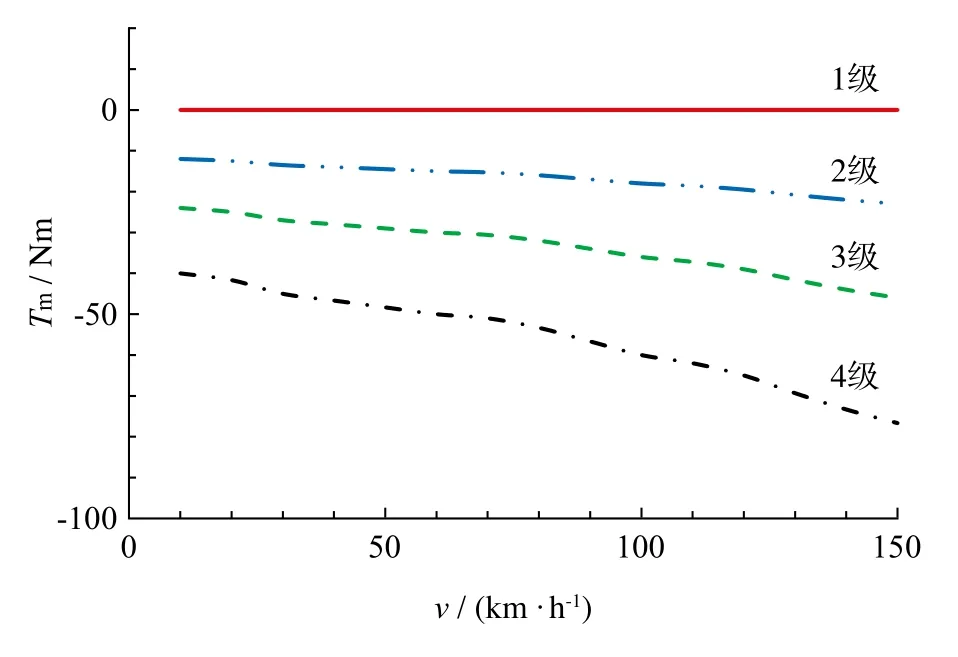
图1 由滑行强度等级和车速决定的电机制动力距

表1 由β和交通信息决定的滑行制动强度等级
滑行制动等级由高变低时,为减少滑行制动力突变引起驾驶员不适感,设置一定扭矩梯度进行平滑;滑行制动等级由低变高时,为保证行车安全,设置较大制动扭矩增长梯度。
2 基于路况的预警/避撞策略
2.1 安全距离模型
车辆制动过程如图2所示。其中:-am为汽车的最大减速度,即

式中,μ为路面附着因数。μ可由相应算法计算[9-10],也可以由表2查取[11],各路面下取附着因数区间的中间值来表示路面平均附着水平。

图2 车辆制动过程

表2 不同路面下的附着因数
通过车载雷达等设备可获得与同一车道前车的相对速度与距离。当相对速度vre≥ 0,即前车车速大于等于本车车速,不会有碰撞风险。当vre< 0,有发生碰撞的危险。能够使本车以最大减速度制动时恰好与前车不发生碰撞的两车间距即为安全距离,即:

式中:Sr为从当前时刻到最危险碰撞时刻后车行驶距离;Sf为从当前时刻到最危险时刻前车行驶距离;Ss为两车最小间距,取为0.5 m。
若前车速度先减为0,最危险时刻为后车停车时刻,若后车减速度大,能够在前车停车前先减速为0,最危险时刻为两车共速时刻。
文献[12]通过调查125名驾驶员行车制动情况得出结论,98% 的驾驶员行车减速度不会超过-2.17 m/s2,若简单地采用前车最大减速度模型,在绝大多数情况下预警、主动避撞距离过大,影响道路空间利用率。
本文设定在同一路面上,本车与前车具有相同的最大减速度。在周期T内测得前车速度变化量得到其减速度,可由实际精度需求对减速度大小进行分类,本文将前车减速运动模型分为前车轻度制动(-2~0 m/s2)、重度制动 (-4~-2 m/s2)和紧急制动 (-am~-4 m/s2),为保证安全和减小测量误差,如式(15)所示,前车减速度按所属范围最小值计算。
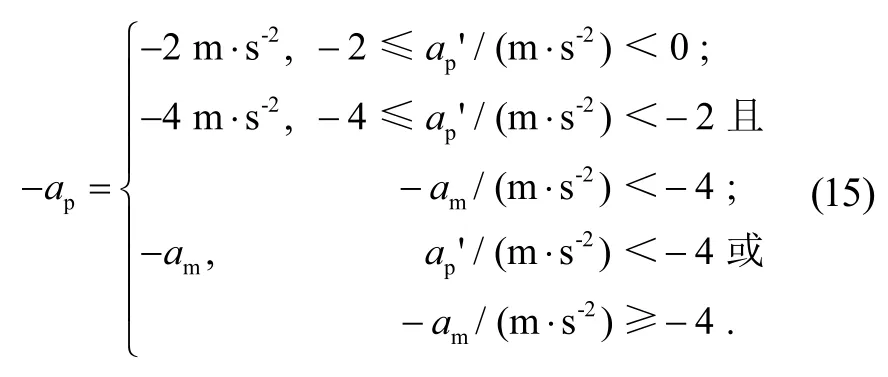
式中:ap为前车减速程度归类的绝对值,a"p为探测到的前车在周期T内的减速度平均值。T取值过大会导致预警和避撞滞后,起不到安全预警作用;取值过小前车速度轻微波动就有可能导致预警模型变化,容易导致误判。由于驾驶员的反应时间t1在0.3~1.0 s之间,本文取T= 0.3 s。
从探测到前车减速到前车减速停车的时间为
式中,vp为前车的当前车速。
本车减速停车时间为
式中,vs为后车的当前车速。
若ts≥tp,前车先停,最危险时刻为本车减速为0时刻。此时,后车运动距离为

前车运动距离为
若ts<tp,后车先停车,最危险时刻为两车共速时刻,此时定有am>ap。设在持续制动阶段t"4两车共速,即:
若t"4< 0,则在减速度增长时间t3内两车共速,由于t3较小(0.2 ~ 0.9 s),为简化计算和保证安全,作t"4≥0限制。
后车运动距离为

前车运动距离为
式中,t"为从当前时刻到两车共速的时间。比较ts、tp的大小,将Sr1、Sf1或Sr2、Sf2代入式(14)计算安全距离。根据上述算法,在不同的路面附着系数和前车减速程度下,遍历前车和后车的车速情况,制作安全距离等高图,如图3所示。实时计算时,根据当前所处路面、本车和前车车速、前车减速程度查表即可得到安全距离,提高计算实时性。

图3 干燥沥青路面上前车轻度制动时安全距离
2.2 预警策略
安全距离模型中的t1、t2设为0即为触发自动避撞系统的最小安全距离dbr;充分考虑t1、t2的安全距离即为预警距离dw,本文计算预警距离时设定t1、t2之和为2 s。
定义危险因子为

式中,dr为传感器探测的本车与前车距离。危险因子(ε)与预警等级(CW)的关系如表3所示

表3 ε与CW关系
3 制动协调策略
判断车辆的制动模式,若踩制动踏板制动,根据踏板开度判断驾驶员的制动意图,若为滑行制动,由交通信息确定滑行制动强度。
根据预警程度对踏板制动意图和滑行制动强度进行修正,来提高车辆的安全性。预警程度对滑行制动强度的修正见表4。无碰撞预警时,保持基于交通信息的制动强度,I级碰撞预警时,增大制动等级。当预警程度为II级,滑行制动强度变为4级,产生0.1g~0.15g的减速度,增强预警效果,且不干扰驾驶员通过转向等方式避撞。
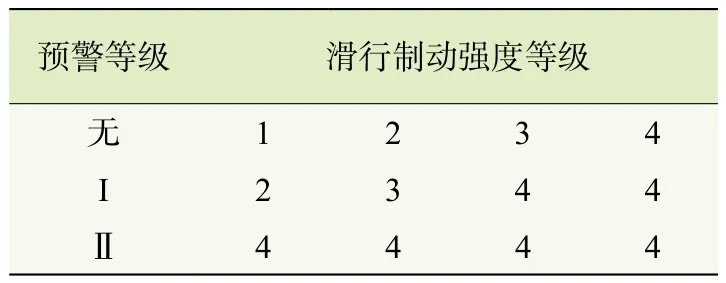
表4 滑行强度的修正
踏板制动模式,驾驶员有主动减速意图,危险因子ε对踏板制动强度因子B的修正为

式中:b为制动踏板的开度,在0到1之间;B0为车辆减速度为0.15g时的制动强度因数。预警强度为0级或I级时,危险程度较低,保持驾驶员踏板制动意图,预警程度为II级时,增强踏板制动力。为保证制动连续性,减少制动冲击,进入II级踏板制动修正后,完全放松制动踏板方可退出该模式。
若令Tmax为轮端最大制动力矩,则轮端实际制动力矩为
4 仿真验证
4.1 基于交通状况的滑行仿真
1) 良好通行路况下的仿真。
如图3所示,选择NEDC循环的市郊工况,并在各匀速阶段共设置8个滑行区间,每个滑行区间的时间为5 s,滑行之后回到目标车速。由交通状况确定的滑行等级为1级,即不进行能量回收,传统电动车的滑行模拟发动机的倒拖,滑行等级为2级。
图4中涵盖了从中速到高速的滑行工况,基本能够代表良好通行条件下的综合路况:采用1级滑行,整个工况循环的总能耗为3.208 MJ,采用2级滑行整个工况循环的总能耗为3.243 MJ。在该工况循环下,采用基于交通状况的电动汽车滑行制动相较于模拟发动机倒拖的滑行制动,总能耗减少1.1%。
2) 拥堵及超速工况滑行仿真。
设在市区工况下,车辆限速为40 km/h,初始车速为50 km/h超速行驶,在收到超速预警后放开加速踏板滑行,仿真结果如图5所示。在40 km/h以上,滑行强度为4级,车辆快速减速,在3.4 s内车速降低到40 km/h,之后滑行强度变为3级。相比于仅克服道路滑行阻力和模拟发动机滑行制动,基于交通工况的滑行强度在交通拥堵及超速情况下能快速减速,从而减轻驾驶员频繁制动负担。

图4 市郊工况滑行强度比较

图5 拥堵及超速工况滑行结果
4.2 基于路面及雷达信息的避撞仿真
1) 对同一路面前车不同程度减速进行仿真。
干燥沥青路面上,设两车相距50 m,初速度均为80 km/h,前车分别以-1.5 m/s2和-3.5 m/s2进行减速,被识别为轻度和重度制动,本车以匀速行驶,直至触发自动避撞。预警程度和相对距离(S)的仿真结果如图6所示。
以本文的制动程度识别和原始的前车按最大减速度计算作对比仿真。前车以 -1.5 m/s2制动,最危险时刻为两车共速时刻,之后本车速度小于前车速度,两车距离增加;前车以-3.5 m/s2制动,前车先停车,最危险时刻为本车停车时刻。由仿真结果,原始算法在前车-1.5 m/s2和-3.5 m/s2最危险距离分别为21.2 m和14.6 m,而采用前车制动强度识别的避撞算法最危险距离为2.4 m和2.9 m,大大提高了道路通行效率。从开始预警到触发自动避撞,前车制动程度识别的预警时间在前车2种减速条件下分别为2.3 s和2.2 s,满足驾驶员反应周期,避免了频繁预警。
2) 对不同路面前车以相同减速度制动进行仿真。
分别设置干燥沥青、潮湿沥青、积雪路面工况,两车相距50 m,初速度均为60 km/h,前车以-2 m/s2制动,本车以匀速行驶,直至触发自动避撞。图7为在3种路面下的两车预警程度(CW)和相对距离(S)。
由于积雪路面附着系数最小,最先触发碰撞预警和自动避撞,潮湿沥青路面次之,干燥沥青路面最后触发自主避撞。3种情况下的最小相对距离分别为2.3、1.4、0.6 m,均能保证制动安全且具有良好的道路通行效率。

图6 同一路面前车不同程度减速仿真
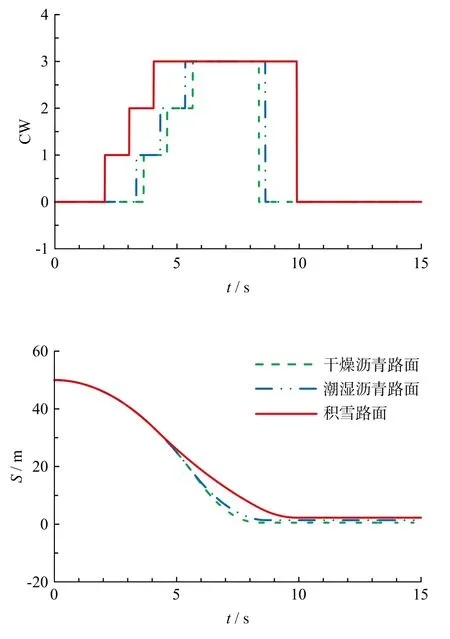
图7 不同路面前车相同制动强度仿真
4.3 基于预警信息的制动协调仿真
设置相距50 m的两车初速度均为80 km/h,前车以-1.5 m/s2减速制动,本车保持匀速行驶。进行制动协调与未协调的速度、加速度、预警程度仿真结果如图8所示。
在4.5 s时收到I级避撞预警,踩下制动踏板减速制动,在6.2 s变为II级制动预警,制动协调系统对制动意图进行修正,增大制动减速度,最终没有触发紧急避撞。若不对当前制动意图进行协调,将会导致紧急避撞,对驾驶员造成严重的制动冲击。
5 结 论
人为驾驶车辆时,环境感知对车辆驾驶有着重要的辅助作用,基于路况信息制定行驶策略,能够增强驾驶的安全性、舒适性与经济性,结合本文研究可得出以下结论:
1)利用交通信息,滑行制动可在中高速无碰撞风险工况减小回收强度,增强全局经济性;在拥堵或超速工况,增强制动强度,减少驾驶员的制动负担。
2)对路面信息和前车减速状态进行考虑,能够在各种路面条件下,针对前车的不同减速程度,做出合理的预警和避撞行为,在保障安全性的基础上,减少过度预警,保证道路的良好通过性。
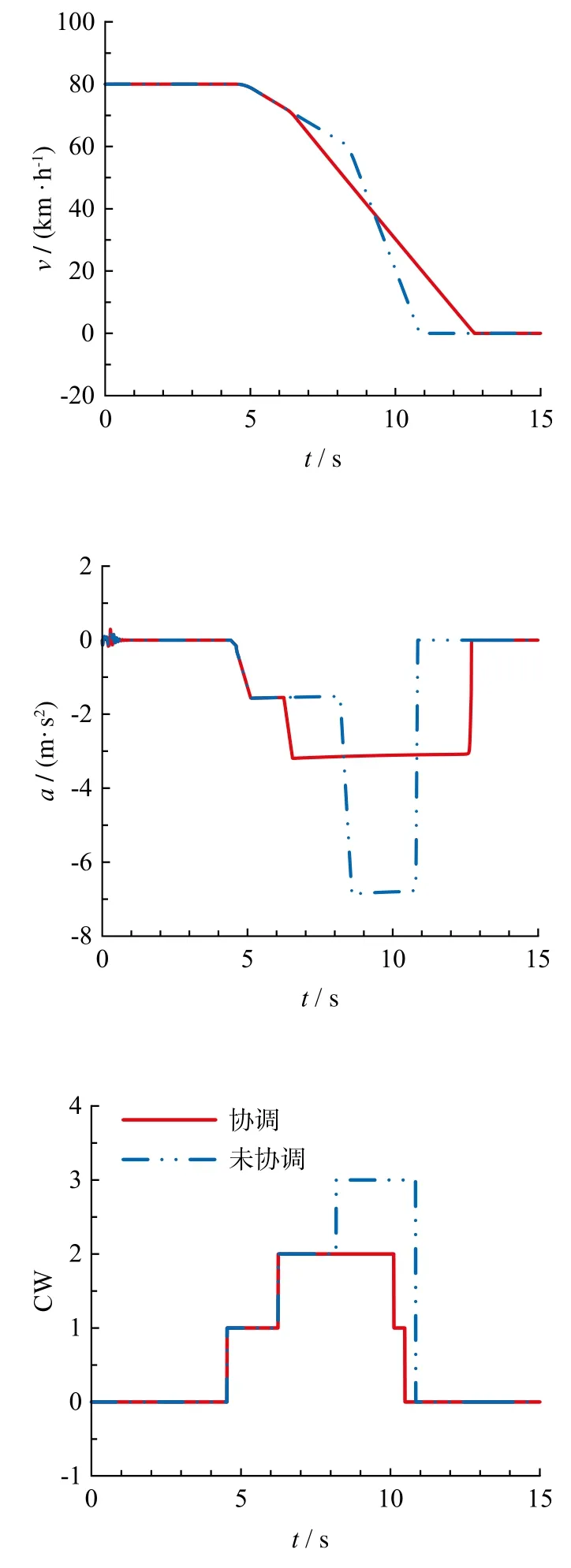
图8 制动协调效果比较
3)有碰撞危险时,对制动强度进行修正,能够给驾驶员提供更多时间进行避撞操作,减小自动紧急避撞的触发概率,从而减小制动冲击度,保障驾驶员的安全和驾驶舒适性。
在避撞算法上,本文仅考虑了纵向避撞算法,在以后的研究中,可结合路况信息对转向等横向避撞策略进行研究,进一步提升驾驶的安全性与舒适性。
