基于决策树模型的电动自行车与SUV碰撞中骑车人头部响应
2021-04-20白中浩高文睿周启峰蒋彬辉
李 欢,白中浩,高文睿,周启峰,蒋彬辉*
(1.湖南大学,汽车车身先进设计制造国家重点实验室,长沙 410082,中国;2.韦恩州立大学 生物工程中心,底特律 48201,美国)
截止到2019年底,中国大陆电动自行车(E-bike)累计产量高达4.4亿辆[1]。骑车人的伤亡人数呈逆势上升的趋势[2]。因此,为保护易受伤害人群(vulnerable population,VRU),在交通安全研究中应加强对电动自行车骑车人的损伤机理和防护研究。
D. Baschera等人[3]比较了2008 - 2014年美国电动自行车和普通自行车骑车人的损伤模式及严重程度。K.Hermon等人[4]统计发现头部为最常见的受伤部位。Q.Chen等人[5]分析了中国交通事故深入研究(china indepth accident study,CIDAS)数据库中2012年两轮车事故的统计数据,发现骑车人受伤最多的部位是头部,占比为27.4%。因而,骑车人头部防护成为电动自行车安全研究中的关注重点[6]。
事故中骑车人头部响应特性,多依靠事故重建来获得。例如:利用PC-Crash、MADYMO等多体动力学软件和LS-DYNA等有限元软件开展交通事故重建和损伤分析,以获得受害者头部在事故中的运动学和损伤响应[7-9]。王鑫[10]等人利用PC-Crash重建了13起电动自行车-机动车碰撞事故,分析了车型、碰撞类型和碰撞速度等对骑车人头部运动学响应和损伤的影响。尹均等人[7]重建了20余起电动自行车与机动车事故研究速度对抛距的影响。张鹏等人[8]则从国家车辆事故深度调查体系数据库(national automobile accident indepth investigation system,NAIS)选取了若干电动自行车与汽车侧面碰撞且造成骑车人重伤或死亡事故来进行重建,发现两车碰撞点位置与骑车人损伤风险相关性较强。刘娜等人[11]在PC-Crash中完成近200例电动自行车与机动车事故仿真计算后,发现电动自行车骑车人抛距和下肢加速度峰值随机动车速度增加而增大。因而,通过事故重建获得的头部响应数据无法保证其普遍性而难以用于相关防护标准、法规等的建立。此外,头部道路交通伤作为一种复杂的、多因素错综影响的高维度问题,基于少量的事故重建数据和传统的参数分析方法难以获得解析。
本文拟基于决策树模型对电动自行车与运动型多功能车 (sports utility vehicle,SUV)碰撞事故工况中骑车人头部响应特性展开研究:通过试验设计法(design of experiment, DOE)调整电动自行车和SUV两者的碰撞初始速度、碰撞初始角度、碰撞初始位置以及骑车人体型等构建大量碰撞事故工况;利用多刚体模型对这些工况展开仿真分析,形成数据集;对数据集开展数据挖掘,采用决策树算法发掘参数内在关系,并以树形结构形式(决策树模型)将参数与结果之间的关系描述出来,形成头部响应决策树模型。头部响应决策树模型作为一种参数与结果之间的规则关系模型,无需再进行仿真计算即可快速预测和决策,非专业人员也可使用,在一定程度上可替代仿真模型用于制定头部安全评估法规性实验及头部防护研究。
1 研究方法
1.1 决策树模型
本文拟采用由J. Ross Quinlan在基于信息增益的ID3算法基础上提出的C4.5决策树算法来创建骑车人头部响应决策树模型。获得的决策树模型由决策节点(decision node)、分支和叶节点(leaf node)3部分组成(如图1所示)。
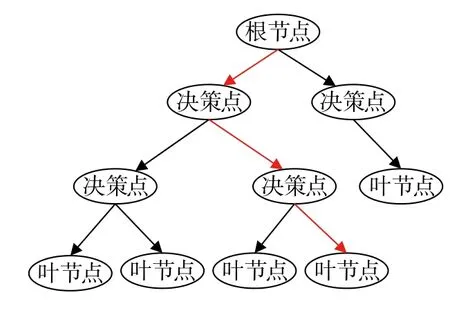
图1 决策树模型示例
图1中:每个决策节点代表一个问题或者决策,通常对应待分类对象的属性,每个叶节点则代表一种可能的分类结果。在骑车人头部响应决策树模型中,骑车人头部响应即为待分类对象,可以是头部运动学响应,也可以是头部损伤响应。影响这些响应的碰撞工况即为待分类对象的属性。每个决策节点上的问题(碰撞工况)的不同决策输出(取值)导致不同的分支,最后到达一个叶节点,对应某一类别(头部响应等级)。
利用C4.5决策树算法创建图1决策树模型的流程是在获得一个由待分类对象的属性和分类结果组成的数据集后,首先选择决策节点分裂属性,即解决选择待分类对象的哪个属性进行节点分类。C4.5算法基于信息熵理论进行决策,即通过信息熵获得待分类的属性的信息增益率作为选择节点分裂属性的指标。信息熵定义为
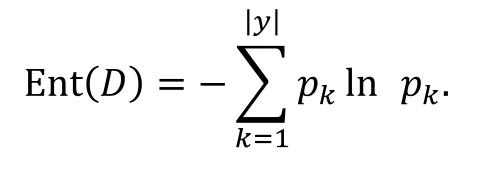
其中,pk为当前样本集合p中第k类样本所占的比例。
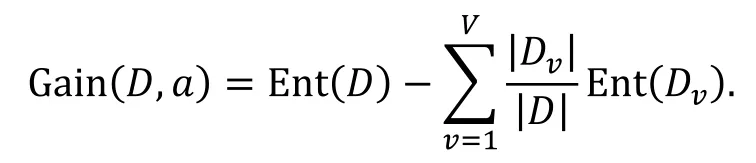
若令V表示待分类的属性a有V个可能的取值,Dv表示D中对于属性a取值是av的样本,则利用信息熵,可获得待分类的属性的信息增益为
待分类的属性的信息增益率为
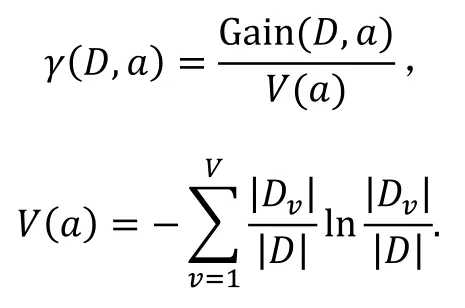
从待分类的属性的信息增益率中可看出信息增益率表示了待分类对象的属性能够为分类系统带来的信息,信息越多则表示该待分类对象的属性越重要,因此最先被选择的决策节点分裂属性作为根决策节点对分类结果影响最大。在其后的决策树模型建模过程中,不断根据信息增益率选择下一级待分类对象的属性来建立新节点,进一步划分数据,直到样本数低于设定阈值停止生长[12-13]。本文中上述决策树模型的建立过程在 WEKA (V3.8.3, Waikato University,New Zealand)中完成。
1.2 骑车人头部响应决策树模型建模
依据决策树模型的创建过程,骑车人头部响应决策树模型建模基本流程:
1) 通过全因子DOE构建大量不同的电动自行车和SUV碰撞事故工况,并建立相应的多刚体模型;
2) 利用多刚体模型开展仿真分析以收集和形成用于数据挖掘的数据集;
3) 利用决策树算法对数据集开展挖掘形成决策树模型;
4) 验证并解读决策树模型。
1.2.1 多刚体碰撞模型
论文作者团队开发了轿车与电动自行车碰撞多刚体模型,并通过事故重建对模型进行了验证,结果显示创建的多刚体模型准确可靠,可进一步用于骑车人头部运动学学响应研究[14]。利用该多刚体模型,参照国内某SUV几何尺寸,将模型中轿车几何尺寸修改为SUV后作为本研究中的基础模型。
基础模型包括电动自行车模型、SUV模型及戴头盔的骑车人模型。其中电动自行车模型由车把、前叉、前轮、后轮、车架、座椅、电池等部分组成。SUV模型则只考虑了与电动自行车及骑车人发生碰撞的前端部分,包括:发动机罩、保险杠、车顶、挡风玻璃以及前后轮。骑车人则由软件MADYMO (Version 7.5, TASS,Rijswijk, The Netherlands)自带的Hybrid III多刚体假人来模拟,并在假人模型头部佩戴了A类半盔型头盔。该头盔质量约为800 g,尺寸参考头盔头围设计标准要求(560~580 mm)适当调整后定义为572 mm,并通过一个以头部质心为转动中心的球铰将头盔与头部相连。头盔接触特性的设置满足摩托车(最高设计车速 ≥ 50 km/h)头盔标准中“头型冲击器在跌落试验中受头盔防护后的加速度峰值不超过300g”的要求[15]。
1.2.2 数据收集
为节省计算机CPU总耗时,只研究了对骑车人头部运动学学响应有显著影响的参数,挑选电动自行车碰撞初始速度v(EB)、SUV的碰撞初始速度v(SUV)、碰撞初始角度θ、碰撞初始位置Pos以及骑车人体型Size等5个参数。为构建不同的电动自行车和SUV碰撞事故工况,通过DOE调整上述5个参数。各参数的调整范围及水平具体如下:
骑车人体型主要考虑了百分位为5th、50th、95th的3种常用的汽车安全测试假人体型[17-19]。SUV和电动自行车碰撞初始速度取值范围统一定义为10~20 m/s和2~8 m/s,其方向分别沿各自中轴线朝前。两者碰撞角度(如图1所示)的取值范围为0°~90°,其中0°表示追尾碰撞,90°表示侧面碰撞,而90°~180°的情况与之对称,为节省计算时间未考虑[22]。
参考McNally等人[18]的研究中为使骑车人头部有可能发生车辆碰撞,碰撞初始位置范围设定为车辆中线附近±0.5 m的范围,包括3个水平:假人H点位于车辆中线左侧 (L) 0.25 m,中线 (M)和中线右侧(R) 0.25 m位置,如图2所示。各参数范围和水平设置见表1。
对上述参数进行全因子实验设计,基于多刚体基础模型共获得1 512组电动自行车和SUV碰撞仿真模型。本文基于多目标优化软件modeFRONTIER(2016,ESTECO, Trieste, Italy)搭建自动化仿真分析平台。在该平台中集成了MADYMO(Version 7.5)和MATLAB(2017)对获得的1 512组模型进行仿真计算和结果处理,最终形成可用于数据挖掘的数据集。
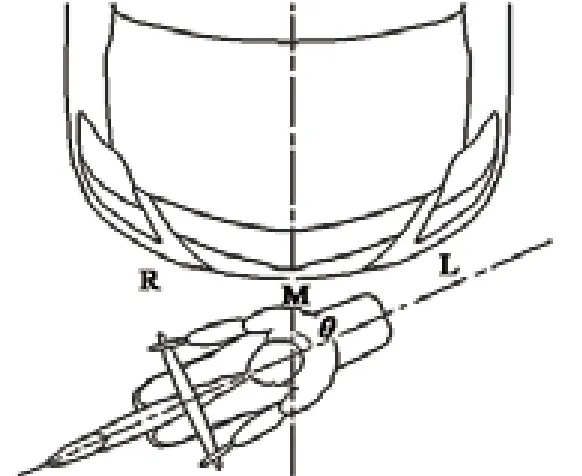
图2 初始碰撞位置
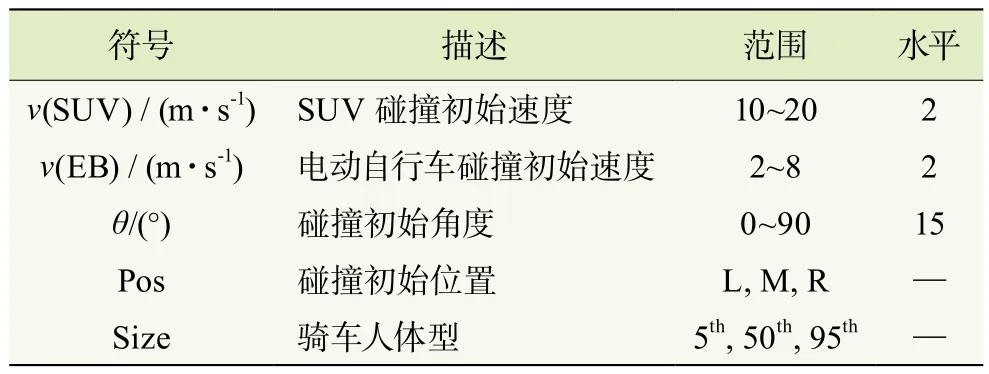
表1 参数范围和水平设置
1.3 骑车人头部运动学响应决策树模型
研究中使用多刚体碰撞模型来获得用于数据挖掘的数据集。多刚体模型能获得系列头部运动学响应,其中:头部相对碰撞速度vhead、头部碰撞点包绕距离(wrap around distance, WAD)、基于头部加速度的头部伤害允许指标(head injury criterion, HIC15)均包含在数据集中。因而,可分别将三者作为待分类对象,创建vhead、WAD、HIC15决策树模型组成头部运动学响应决策树模型。
在创建的头部运动响应决策树模型中,待分类对象的属性为制定碰撞工况时使用的表1中5个参数,它们将成为决策树模型中的决策节点;分支为参数的特定取值范围;叶节点则是头部运动学响应的分类情况。利用决策树模型解读头部运动学响应特性时从决策树的根决策节点开始解读:位于根决策节点的参数对头部运动学响应影响最大,决策节点下的某分支代表着该决策节点在某取值水平下的分类走向。从根决策节点到叶节点的整个路径即为一种头部运动学响应分类结果的预测或决策过程,如图1中的红色路径所示。
2 研究结果
2.1 数据集
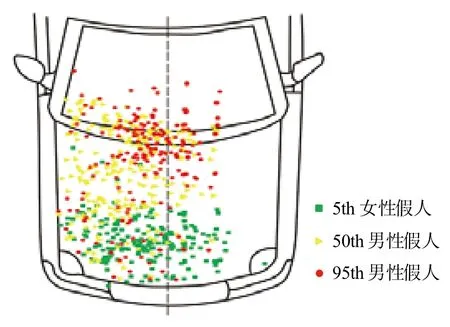
图3 头部碰撞点分布
在1 512组仿真结果中,有743组仿真中的骑车人头部与SUV发生了碰撞,为有效仿真数据,其他未发生头部与车体碰撞的仿真则剔除。有效数据中,头部与车辆碰撞点分布如图3所示。图3中,大部分碰撞点分布在SUV中心线的右半部分,这主要是由于电动自行车和SUV碰撞初始角度范围为0°~90°,使电动自行车初始碰撞速度相对SUV向右导致。碰撞点中有94例(或12.65%)分布前风挡玻璃上,649例(或87.35%)则发生在发动机罩。
2.2 头部响应决策树模型
骑车人头部响应主要考虑了vhead、WAD及HIC15;其中:vhead和WAD是影响头部损伤的主要因素,也是建立骑车人头部安全评估测试方法和标准的主要参数[23-24];HIC15是最常用的头部损伤评价指标[25]。按照头部响应结果对数据集进行等级的划分,相应头部响应等级划分如表2所示。根据这个等级划分,利用决策树算法C4.5对743组有效数据进行挖掘分类和剪枝,获得相应的决策树模型。
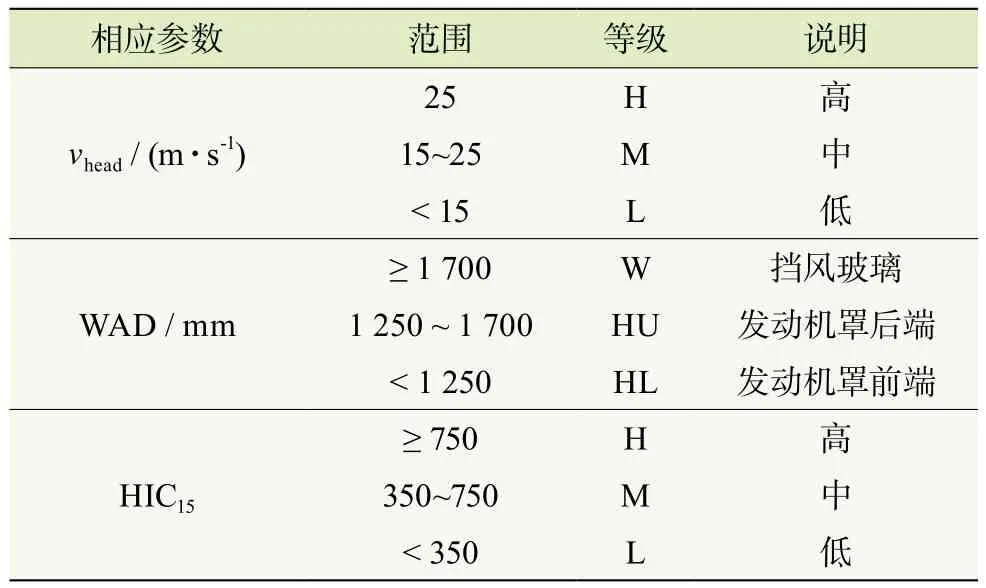
表2 头部响应等级划分
2.2.1 头部相对碰撞速度决策树模型
头部相对碰撞速度决策树模型如图4所示。该决策树模型尺寸为26,叶节点数为14,头部相对碰撞速度等级L、M、H分类准确率分别为87.4%、95.2%、94.9%,平均分类准确率为92.5%。每个叶节点分类精度可通过叶节点上的数字获得,如叶节点A1“H(200.0/23.0)”表示该分类结果为H,其中有200组数据点分类正确,23组分类错误。模型用于预测和决策时,只需选择正确的分支即可获得结果,如图4中红色箭头分支:当vSUV> 16 m/s, > 0°时,可知vhead≥25 m/s。
为验证图4中决策树模型的准确性,在3种分类等级中挑选了分支短,精度高的A1、A2、A3分支形成预测规则并在各自预测规则的参数范围内使用Latin square设计各生成5组,共计15组事故工况开展仿真分析,结果如表3所示。
表3中各预测规则下验证结果准确率与挑选的分支精度及模型整体精度接近,表明头部相对碰撞速度决策树模型准确可靠。
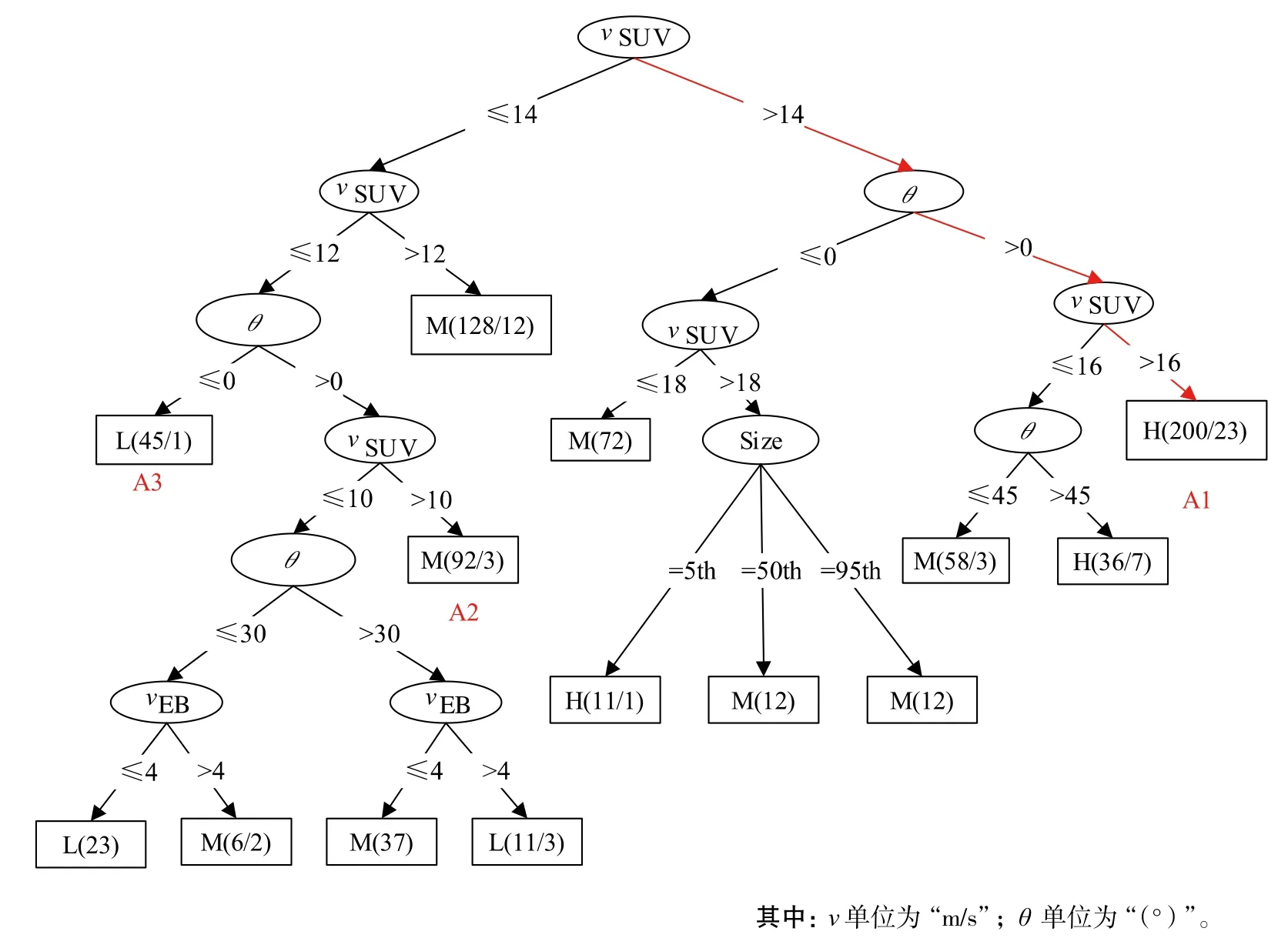
图4 头部相对碰撞速度决策树模型
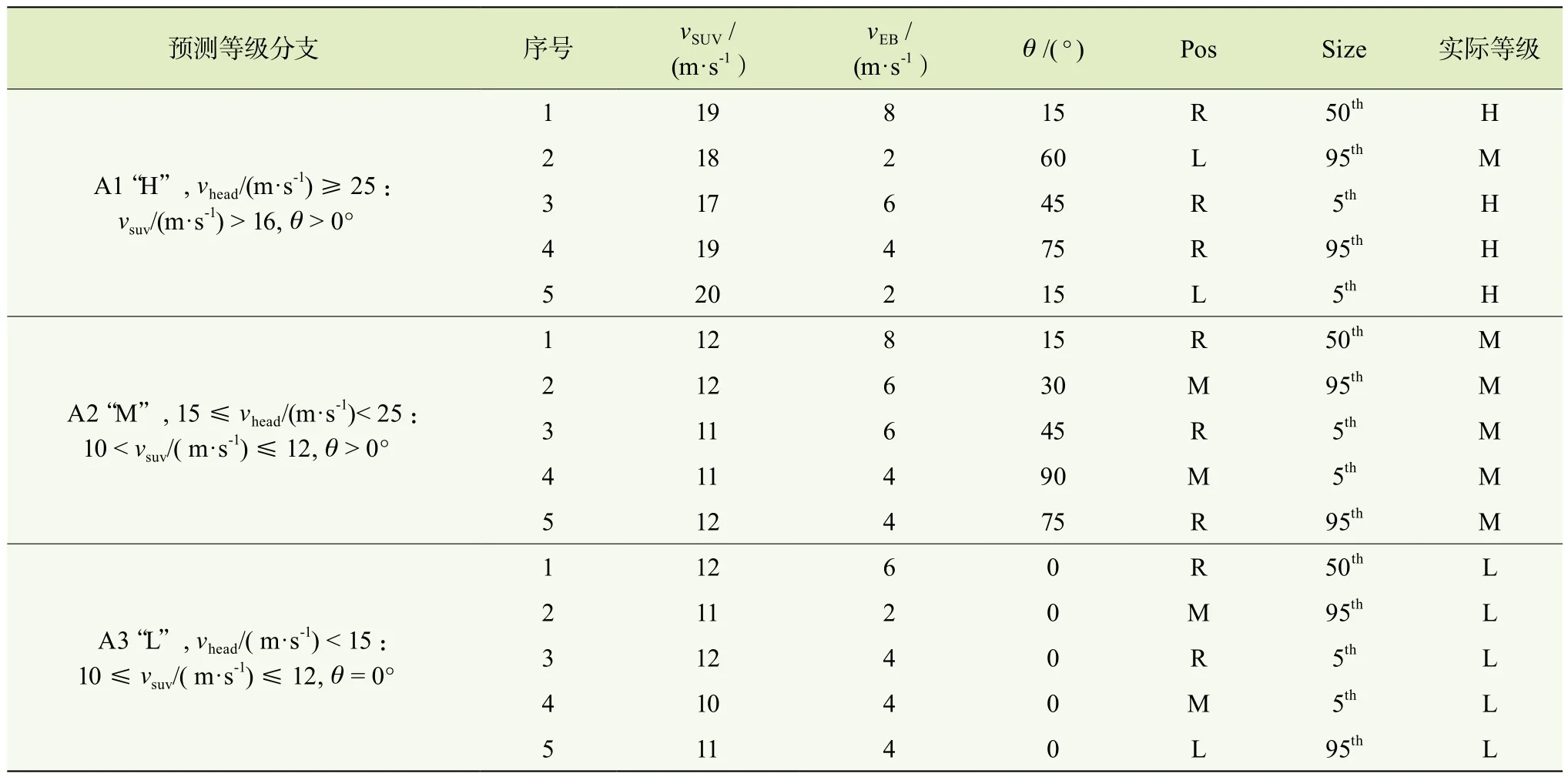
表3 验证方案与结果(头部相对碰撞速度)
从图4叶节点分类正确和错误的数据点可获得A1、A2、A3的预测准确率分别为89.6%、 96.8%、97.8%,平均准确率为92.6%。
由图4中决策树模型可以看出,vsuv即SUV碰撞初始速度是该决策树模型根节点,对vhead影响最大参数,其次是碰撞初始角度。且头部相对碰撞速度随SUV车速的增加而增大,与Nie等人[24]和王鑫等人[10]研究中发现骑车人头部相对碰撞速度与车辆撞击初始速度正相关的结论一致。
2.2.2 头部碰撞点WAD决策树模型
头部WAD决策树模型如图5所示。该决策树的尺寸为26,包含的叶节点数为14,等级W、HU、HL的分类准确率分别为61.9%、84.3%、90.5%,平均分类准确率为78.9%。
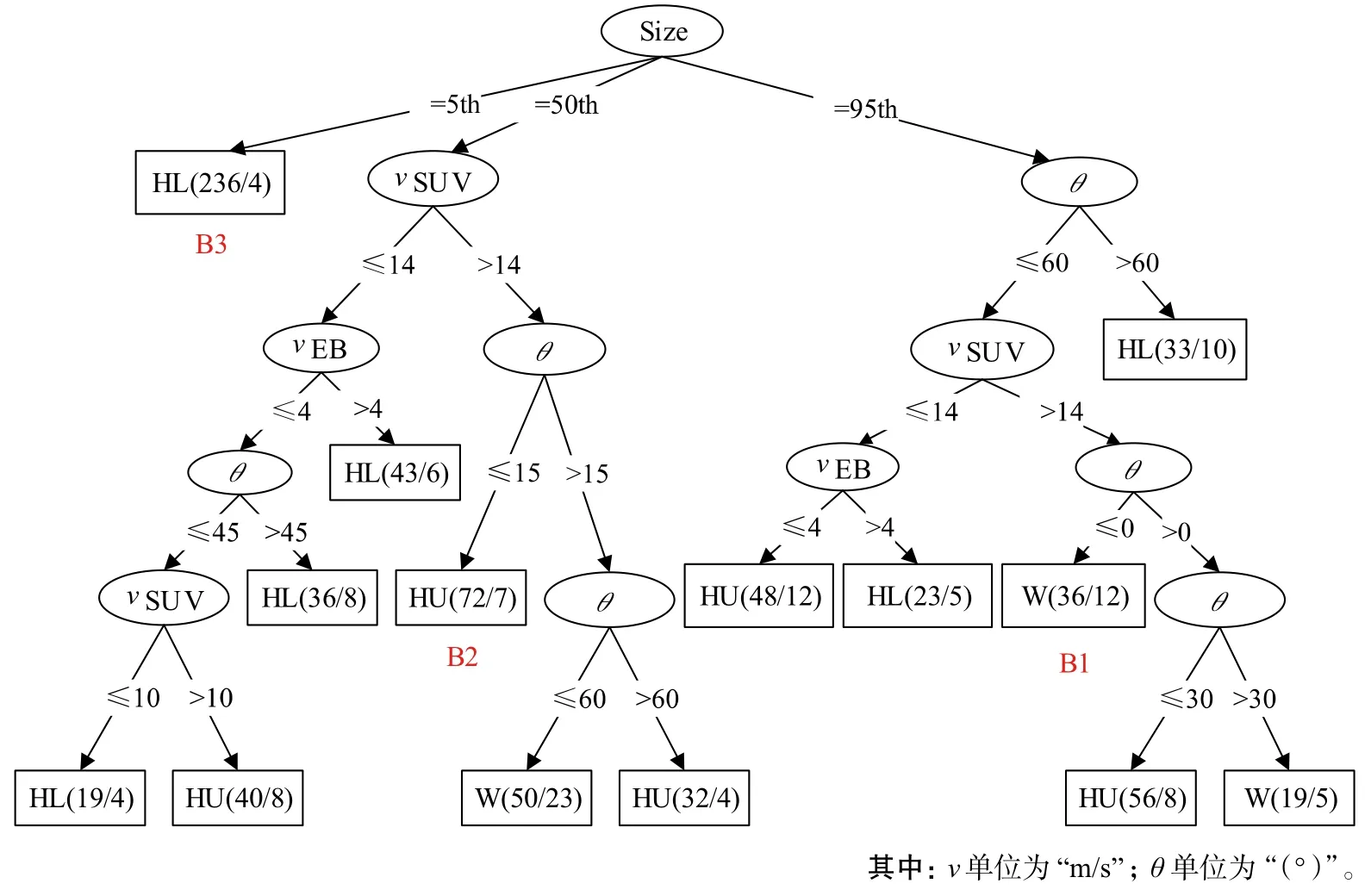
图5 头部碰撞点WAD决策树模型
采用同样的验证方法,对头部碰撞点WAD决策树模型展开验证,结果如表4中所示。从图5叶节点分类正确和错误的数据点可获得B1、B2和B3的预测准确率分别为75.0%、91.1%和98.3%,平均准确率为93.7%。表4中各预测规则下验证结果的准确率与挑选的分支精度及模型整体精度接近,表明头部碰撞点WAD决策树模型准确可靠。
由图5中头部碰撞点WAD决策树模型可以看出,骑车人体型是该决策树的根节点,为头部碰撞点WAD的最大影响参数。当骑车人为5th女性假人时,236组数据中有232组头部碰撞点WAD值划分为HL级(发动机罩下部),而头部碰撞点WAD值划分为W级(挡风玻璃上)的数据点多为骑车人体型95th男性假人。总之,头部碰撞点WAD决策树模型显示骑车人尺寸及SUV碰撞初始速度越大,头部碰撞点WAD越大。
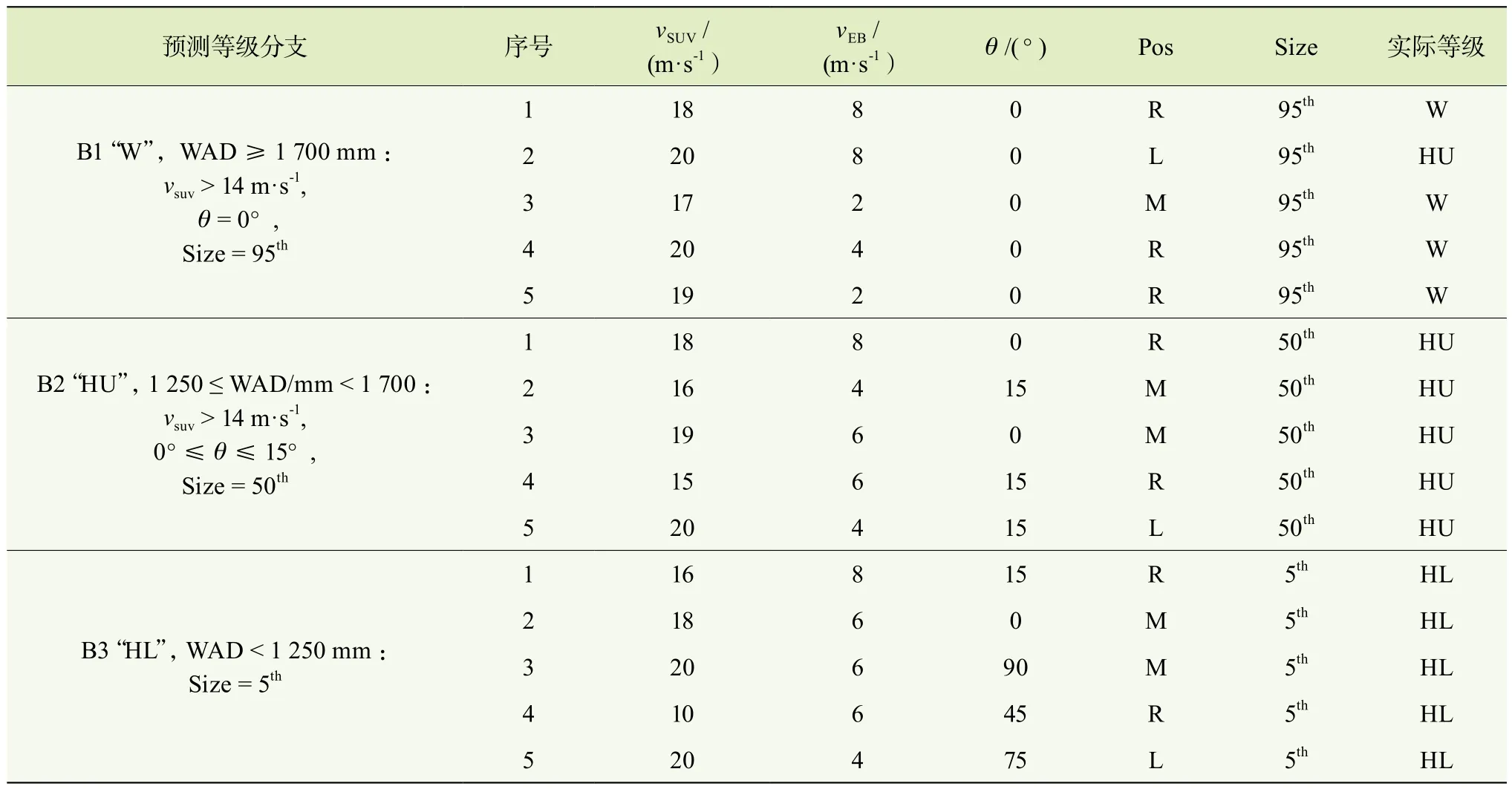
表4 验证方案与结果(头部碰撞区域)
2.2.3 头部HIC15决策树模型
头部HIC15决策树模型如图6所示。该决策树的尺寸为26,包含叶节点数为15,头部HIC15等级H、M、L的分类准确率分别为83.1%、53.3%和84.8%,平均分类准确率为73.7%。
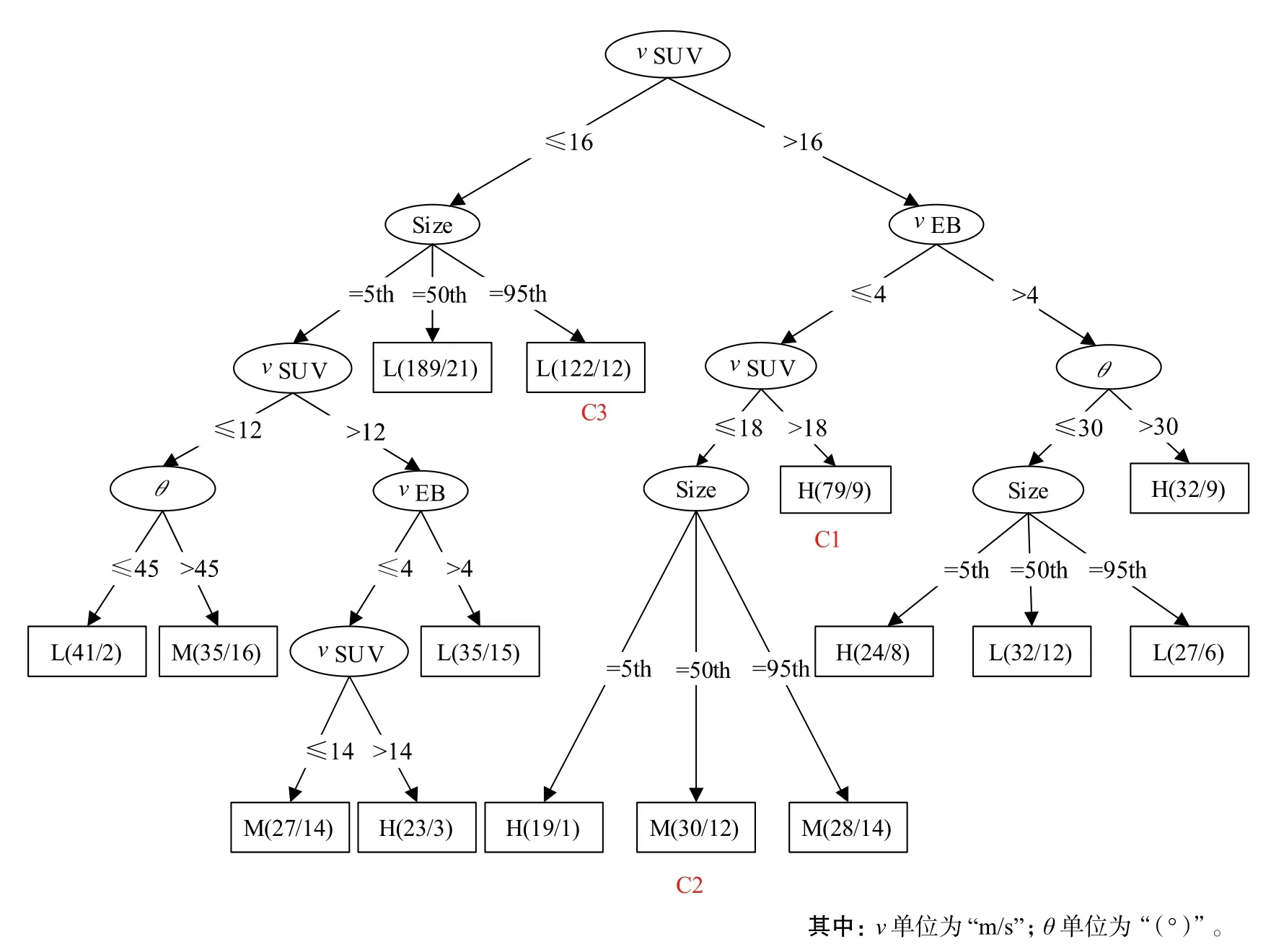
图6 HIC15决策树模型
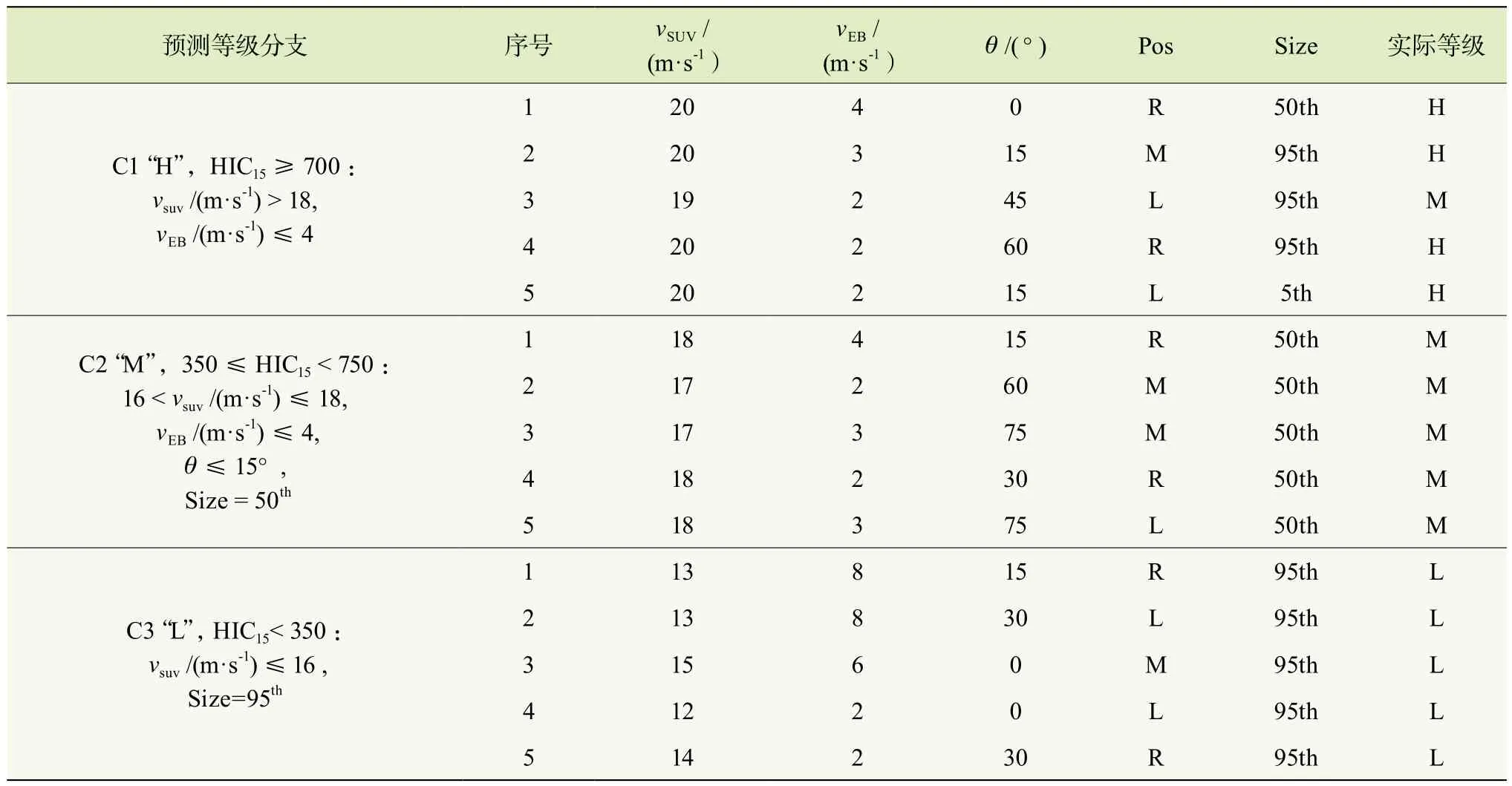
表5 验证方案与结果(HIC15)
类似的方法对头部HIC15决策树模型展开验证,结果如表5中所示。从图6叶节点分类正确和错误的数据点可获得C1、C2和C3的准确率分别为89.7%、71.4%和91.0%,平均准确率为87.5%。表4中C1和C3分支验证结果的准确率与其分支精度接近,而C2分支验证结果的准确率则远高于其分支精度,整的验证结果准确率与模型整体精度接近,表明头部HIC15决策树模型准确可靠。
在图6的头部HIC15决策树模型中,SUV碰撞初始速度为头部HIC15最大影响参数。头部HIC15为H级(HIC15≥ 750)的数据点集中发生在vsuv> 16 m/s 的事故工况中,显示头部HIC15随SUV碰撞初始速度增大而增大,与文献[10,21]的研究结论一致。
3 结 论
本文构建并仿真分析了大量电动自行车与SUV碰撞事故工况,并将仿真结果形成头部响应数据集。基于决策树算法,对数据集展开挖掘形成了头部运动学响应决策树模型。可利用开发的决策树模型快速预测骑车人头部运动学响应的同时,还可获得下述结论:
1) 获得的头部相对速度碰速度、碰撞点包绕距离WAD和头部伤害允许指标HIC15决策树模型,平均准确率分别为92.5%、78.9%和73.7%,模型验证显示准确可靠,可用于电动自行车与SUV碰撞事故中骑车人头部响应的预测、决策和研究。
2) 通过头部响应决策树模型:头部相对碰撞速度受SUV碰撞初始速度的影响最大,SUV碰撞初始速度越大,骑车人头部相对碰撞速度越高;而骑车人体型对头部碰撞点包绕距离WAD影响最为显著,随着骑车人体型及SUV碰撞初始速度的增加,头部碰撞点WAD越大;此外,SUV碰撞初始速度也是头部HIC15影响最显著的参数,HIC15值随SUV碰撞初始速度的增大而增大。
今后,在上述骑车人头部运动响应决策树模型开发基础上,可进一步考虑其他车型对头部响应的影响,开发更为完整的骑车人头部运动学响应决策树模型,并结合事故统计用于制定头部安全评估法规性实验及开展头部防护研究。除此之外,由于缺少专门用于模拟行人或骑车人的假人,本文采用的Hybrid III假人实际是针对汽车正面碰撞中的乘员开发的,因而该假人在模拟骑车人时可能会存在一定的不准确性,在今后研究中应进行改进。
