一种分布式雷达/红外复合制导信息融合方案
2021-04-20李时光磨国瑞
李时光 李 云 职 晓 磨国瑞
(西安电子工程研究所 西安 710100)
0 引言
现代战争的战场环境日益复杂,电子对抗的手段也越来越多样化,这就对精确制导武器的探测精度、抗干扰能力及稳定性提出了越来越高的要求。多模复合制导武器能够充分发挥各制导体质的优势,互相弥补各自的天然劣势,从而达到强-强联合的目的。自20世纪70年代中期以来,多模复合制导技术一直是精确制导武器的主要发展方向之一。
主动雷达/红外成像复合制导是一种非常经典的复合制导方式,目前国内外已经列装或正在研制的主动雷达/红外成像复合制导武器层出不穷。主动雷达具备在全天候、全天时下大范围快速搜索和跟踪目标能力,但隐蔽性较差,易于被敌方侦察、干扰,目标分类识别能力较差。而红外成像制导具有测角精度高、抗电子干扰能力强、目标识别能力强等优点,可以很好地解决复杂背景下目标选择问题,但红外制导易受天气、战场烟雾影响。采用雷达与红外成像双模复合制导可以提升导弹在复杂电磁环境和复杂背景下全天时、全天候探测制导能力并提升导弹的打击精度、抗干扰性能及生存能力。
在雷达/红外复合制导系统中,信息融合中心会接收到雷达和红外分系统提供的大量信息,如雷达提供的角度、距离;红外提供的角度、尺寸。这些信息有些是互补的,有些又是冗余的。同时,弹上系统对导引头数据处理流程的实时性要求很高。因此,如何充分并高效地利用这些互补和冗余信息是信息融合系统需要解决的重要问题。
本文针对某毫米波雷达/红外成像复合制导系统,给出了一种分布式信息融合方案,主要完成了信息融合策略的制定及对信息融合方案的测试验证。
1 信息融合方案设计
多模复合导引头的复合方式主要有分平台、共平台分孔径、共平台共孔径三种,这三种复合方式各有优劣[1]。本文从弹内空间、开发成本、实现难度、复合精度等多方面需求出发,选取共平台分孔径方式作为导引头复合结构。
信息融合系统按照融合结构可划分为集中式、分布式、混合式和多级式[2-3]。在分布式融合系统中,每个传感器首先对各自的本地观测数据进行航迹跟踪,产生本地航迹,然后由融合中心进行信息融合处理并形成融合航迹。与其他三种融合系统相比,分布式信息融合系统的融合精度虽然不高,但其具有运算量小、通信负担轻、成本低、易于工程实现的优势[4-5],而且不论哪个单模传感器失效时,整个导引头系统仍能正常工作,具有较高的可靠性和容错性[6]。
本文结合毫米波雷达/红外成像复合制导系统总体方案,在现有硬件条件下,综合考虑开发成本、运算量、通信速率等因素,给出了一种分布式信息融合方案,其结构示意图如图1所示。

图1 分布式信息融合方案结构示意图
如图1所示,雷达与红外分系统首先分别完成对同一目标环境的观测,得到雷达回波数据和红外图像。接下来,雷达/红外分系统分别对各自的观测数据进行处理,形成本地航迹,然后,分别将各自形成的航迹及状态信息送往信息融合中心,由信息融合中心完成对这两种传感器航迹信息的时空配准、航迹关联、航迹融合等处理,最后形成用于引导伺服运动和导弹飞行的系统航迹。
与雷达和红外分系统相比,信息融合中心掌握着最全面的决策层信息,因此,本方案中,信息融合中心在进行航迹关联、航迹融合等算法处理的同时,会根据雷达和红外上报的各分系统当前所处的工作状态作出分析和判决,对各分系统的工作方式进行实时反馈和控制,辅助并引导各分系统完成对目标的检测和跟踪。
2 信息融合策略制定
在复合导引头工作过程中,雷达、红外分系统的工作状态均主要有搜索状态和跟踪状态。融合器主要有6种工作状态:雷达搜索、红外搜索、复合搜索、雷达跟踪、红外跟踪和复合跟踪。融合器会根据各分系统上报的实时状态信息在以上6种工作状态中完成切换。在某一特定时刻,融合器只会处于以上6种状态中的特定一种,在每种状态下,融合器都会向雷达、红外及伺服平台发送相应的控制指令和数据,以此来引导各分系统进行相应的操作。
如前文所述,本文采用分布式信息融合结构,这种结构最突出的优势在于信息融合系统对各分系统的依赖性比较低,不论雷达还是红外,都可以在另一种传感器不开机或失效的情况下独立完成制导。因此,复合导引头信息融合中心的控制流程需要在雷达单模制导、红外单模制导、雷达/红外双模复合制导这3种情况下讨论。
1)雷达单模制导
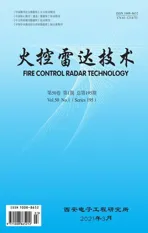
当雷达单模制导时,融合器工作状态迁移图如图2所示。
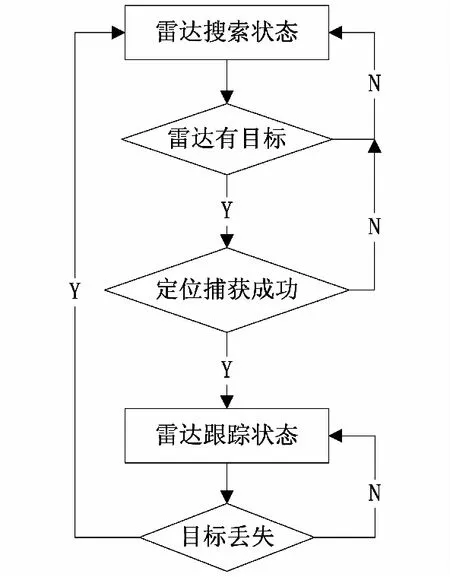
图2 信息融合系统状态迁移图(雷达单模制导)
当融合器得知雷达处于搜索状态时,融合器将处于雷达搜索状态,在此状态下,融合器一方面关注雷达是否搜索到目标,一方面控制伺服平台运动以实现雷达天线的扫描。当融合器收到雷达上报的目标并判断该目标有效后,向雷达发送“定位捕获”指令,若雷达未能成功捕获目标,则融合器停留在雷达搜索状态,否则转入雷达跟踪状态,在雷达跟踪状态下,融合器一方面利用雷达航迹更新系统航迹,一方面实时监控雷达是否稳定跟踪目标,一旦雷达丢失目标,融合器将转入雷达搜索状态,并向雷达下发搜索指令,重新检测目标。
2)红外单模制导
当红外单模制导时,融合器工作状态迁移图如图3所示。与雷达单模制导的情况类似,融合器一方面通过红外分系统上报的状态来切换自身的工作状态,一方面通过“红外搜索”、“定位捕获”等指令来引导红外分系统的工作,同时控制伺服平台的运动,具体的状态切换过程不做赘述,可参考“雷达单模制导”情况。
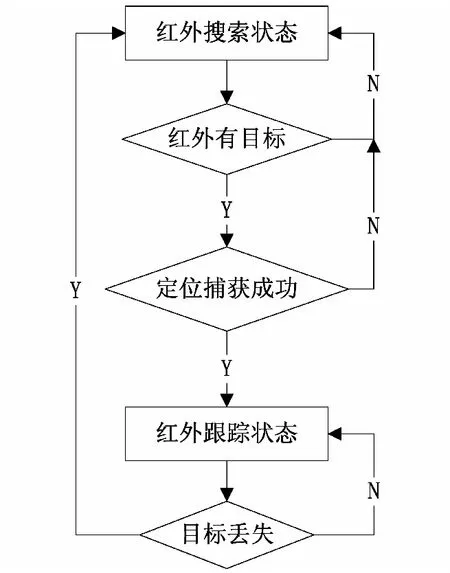
图3 信息融合系统状态迁移图(红外单模制导)
3)双模复合制导
当双模同时开机时,融合器工作状态迁移图如图4所示。
图4 信息融合系统状态迁移图(双模复合制导)
在这种情况下,融合器首先处于复合搜索状态,在此状态下,不断实时监测雷达/红外分系统是否搜索到目标,此时有两种情况:
①雷达先搜索到目标并进入跟踪状态。这种情况下,融合器转入雷达跟踪状态。此时,融合器会根据雷达航迹控制伺服平台的位置,并向红外分系统发送“定位捕获”指令,引导红外检测当前视场内的目标,若红外检测到目标并转入跟踪状态,则融合器进入复合跟踪状态。
②红外先搜索到目标并进入跟踪状态。此时,融合器转入红外跟踪状态,并根据红外航迹控制伺服平台,同时向雷达发送“定位捕获”指令,引导雷达对当前视场内的目标进行检测,若雷达也成功捕获目标并转入跟踪状态,则融合器转入复合跟踪状态。
当融合器处于复合跟踪状态时,融合器一方面对雷达和红外上报的目标位置和状态信息进行关联融合,另一方面实时关注各分系统是否稳定跟踪目标。若雷达丢失目标,则融合器进入红外跟踪状态,利用红外跟踪的目标信息作为引导,指示雷达在特定视场内进行目标检测;若红外丢失目标,融合器转入雷达跟踪状态,此时借助雷达上报的目标信息引导红外进行定位检测;若雷达、红外均丢失目标,则融合器进入复合搜索状态,重新进行目标检测。
如前文所述,如果雷达(红外)成功捕获并稳定跟踪了某个目标,而红外(雷达)未检测到或丢失目标,融合器都可以将稳定跟踪目标的状态数据作为指示信息引导红外(雷达)进行定位检测。由此可见,如果将雷达和红外比作人的“耳朵”和“眼睛”,那么融合器则承担着“大脑”的角色,它既要实现雷达、红外传感器数据的共享,使得二者能够相互借鉴,互相指引,又要根据这两个传感器上报的目标信息进行综合判断,并作出决策,实时计算出用于引导伺服运动和导弹飞行的控制信息。因此,如何在跟踪状态(包括雷达跟踪状态、红外跟踪状态和复合跟踪状态)下充分利用雷达/红外传感器实时上报的测量数据是信息融合系统需要解决的重要问题。
本文结合实际应用背景及雷达/红外分系统的性能,制定了如图5所示的融合器数据处理流程,主要解决了如何在跟踪状态下更新系统航迹的问题。
如图5所示,复合导引头开机后,会根据弹上综控机装订的指示信息进行目标检测,并根据检测结果在合适的时机进入跟踪状态,这里分三种情况进行讨论:
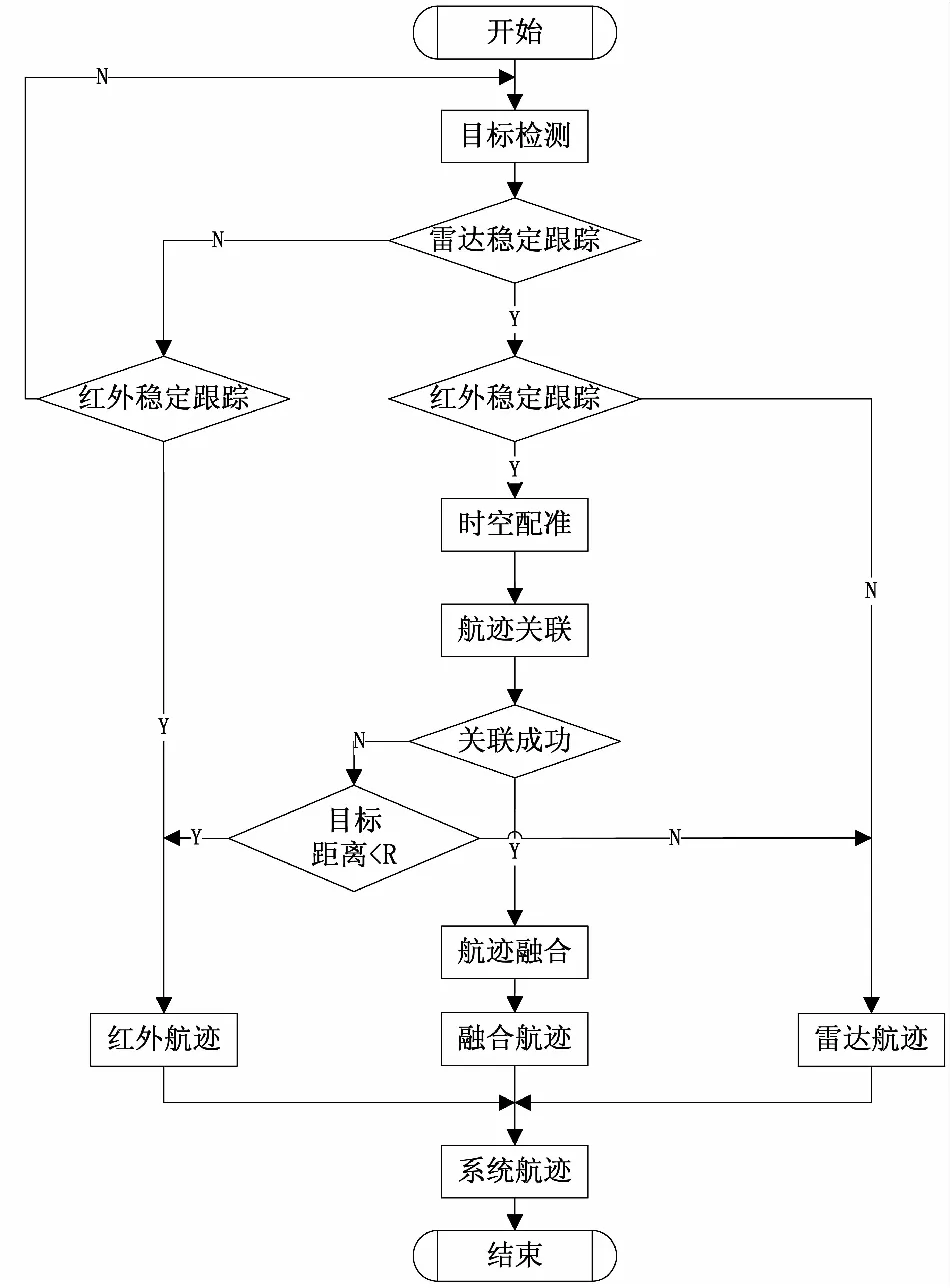
图5 信息融合系统数据处理流程
1)仅雷达稳定跟踪目标。使用雷达航迹更新系统航迹,并向红外发送“定位捕获”指令,令红外在当前视场内进行目标检测。
2)仅红外稳定跟踪目标。使用红外航迹更新系统航迹,并向雷达发送“定位捕获“指令,令雷达在当前视场内进行目标检测。
3)雷达红外均稳定跟踪目标。此时,首先将雷达/红外上报的航迹信息配准到同一时间节点和同一空间坐标系下,再对配准后的航迹进行关联。若关联成功,则认为雷达/红外跟踪同一目标,融合器对关联上的航迹对进行航迹融合,并使用融合航迹更新系统航迹;若未能关联成功,则认为雷达/红外跟踪的不是同一目标,此时对目标的距离信息进行判断,若目标距离小于R,则使用红外航迹更新系统航迹,否则使用雷达航迹更新系统航迹。
3 系统测试及分析
为验证上述信息融合方案及相关算法的有效性和合理性,本项目组进行了多组外场试验。接下来以其中两组典型试验场景为例,进行试验结果分析。
1)场景1:目标船静止,与导引头之间的距离小于R,雷达/红外向融合器上报的目标角度以及经过融合处理后得到的融合角度信息如图6所示。A时刻前,雷达/红外复合跟踪目标船,雷达航迹与红外航迹关联失败,按照图5所示的数据处理流程,融合器以红外航迹更新系统航迹。从A时刻开始,另一艘船只从目标船旁边经过,雷达受到该船只的干扰,丢失目标船,转而跟踪干扰船只,但红外未受到干扰,仍然跟踪目标船。到B时刻,雷达目标丢失,此时,融合器进入红外跟踪状态。按照图4所示的信息融合策略,融合器并向雷达发送“定位捕获”指令,以红外跟踪目标的角度信息为指向,引导雷达在当前视场内重新进行目标检测。到C时刻,雷达重新捕获目标船,融合器再次进入复合跟踪状态。
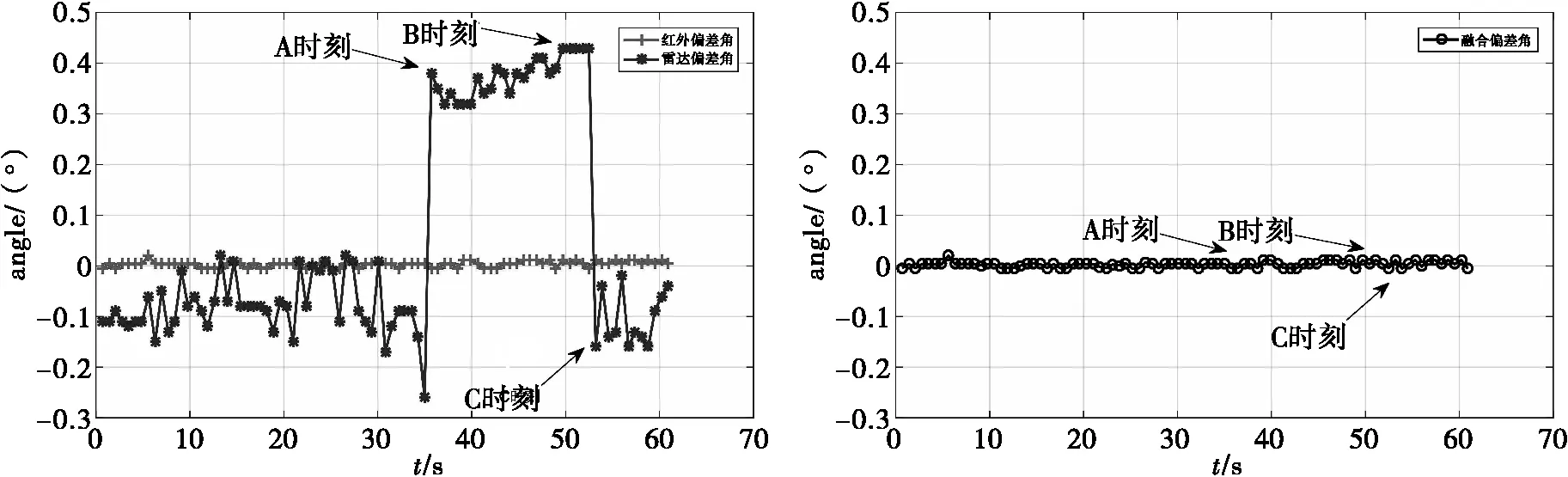
图6 雷达受干扰情况
2)场景2:目标船慢速运动,与导引头相距超过R。雷达偏差角、红外偏差角以及融合偏差角如图7所示。在A时刻之前,雷达/红外复合跟踪目标船,雷达/红外航迹关联成功,融合器以融合航迹更新系统航迹。A时刻开始,一艘尺寸较大的船只从视场内经过,红外受到该船的拖引,丢失目标船,转而跟踪干扰船只,但干扰船只并不在雷达跟踪波门内,因此雷达未受到干扰,仍然跟踪目标船。到B时刻,红外进入目标丢失状态,按照图4所示的信息融合策略,融合器此时向红外发送“定位捕获”指令,以雷达跟踪目标的角度信息引导红外进行定位检测,直到C时刻,红外重新捕获到目标船,融合器再次进入复合跟踪状态。
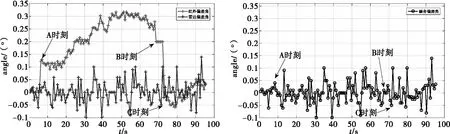
图7 红外受干扰情况
从以上两组试验可以看出,当融合器处于复合跟踪状态时,能够根据目标信息及各单模传感器的优势选择合适的策略来更新系统航迹,当某一模传感器受到干扰或处于目标丢失状态时,融合器都能够根据另一模传感器航迹更新系统航迹,并引导受干扰或丢失目标的传感器进行定位检测,重新捕获目标。由此可见,前文所述的信息融合策略能够高效并充分利用雷达/红外分系统上报的测量信息,并根据二者的优势来来弥补对方的劣势,使得各分系统互为指示,提高了导引头的跟踪性能和抗干扰能力。
4 结束语
本文设计了一种分布式信息融合方案,并制定了信息融合系统融合策略和控制流程。最后通过几组外场实验表明:该信息融合方案能够合理并高效地利用雷达和红外提供的信息,间接完成异类传感器之间的数据共享,使得雷达和红外分系统能够互相引导,尽可能地弥补了对方工作体制上的不足,有效提升了复合导引头的整体性能,为复合导引头的研制提供了较高的参考价值。