定位装置辅助下四肢深部金属异物的精准定位及取出
2021-04-19苏炜炜何藻鹏张国栋李卫许靖廖政文谢普生林东鑫黄文华
苏炜炜,何藻鹏,张国栋,李卫,许靖 廖政文,谢普生,林东鑫,黄文华
1.南方医科大学第三附属医院骨科,广州 510630;2.南方医科大学基础医学院人体解剖学教研室,广东省医学生物力学重点实验室,广州 510515;3.广州医科大学附属顺德医院手足整形外科,广东 佛山 528300;4.南方医科大学附属顺德医院骨科,广东 佛山 528300;5.南方医科大学附属珠江医院康复医学科,广州 510280
据报道,每1000例至10000例手术中就有1例异物残留;由于各种原因,目前报道的比率远低于实际[1,2]。临床中,金属异物占残留异物的很大一部分,它可引起感染、过敏反应、金属锈蚀、异物肉芽肿,甚至诱发肿瘤[3,4]。所以,需要尽快取出异物。常用的异物定位装置有几种:金属网定位是定制两块相互垂直的金属网,用X 线摄片来确定异物的位置[5],这个装置只是缩小异物的寻找范围,并不能准确定位异物;手术入路可视化导航(SAVN)可以捕捉穿过体内异物的X线轨迹,并用激光束形成可视化的导航轨道[6],但该设备呈现的是一个虚拟导航路径,从虚拟导航路径到达定位目标存在操作难点,而且定位后患者不能移动,否则会出现定位偏差;计算机辅助导航系统对患者进行薄层CT 扫描,建立数字化模型,通过坐标转化获取导航探针与三维数字化模型的相对位置进行定位[7],但该数字化模型是根据患者术前的CT 数据重建的,由于肢体的运动、肌肉的收缩,异物在术中的位置可能已经改变,且设备昂贵,不易推广。为此,本研究针对四肢深部软组织金属异物残留,设计一种新型的定位装置,结合C 型臂透视机实现精准定位。
1 材料与方法
1.1 实验材料
1.1.1 设备 软件:Mimics 19.0(Materialise 公司,比利时);SolidWorks 2011(Dassault Systemes S.A,法国)。硬件:3D 打印机:融宇RY-A600 3D 打印机(广州融宇信息科技有限公司,中国);CT 机:Philips/Ingenuity CT(飞利浦公司,荷兰);C 型臂:岛津WHA-200(岛津公司,日本)。
1.1.2 标本 成人尸体防腐上肢标本6 侧、下肢标本4 侧,由广州医科大学附属顺德医院提供。本实验造模65 例,分实验组和对照组,实验组为65 例异物的实际定位结果,对照组为理论上这65 例异物的定位结果,即实验设计的理想的65 例异物的定位偏差距离(D2)均为0。
1.2 实验方法
实验标本造模、模拟异物的定位和取出由不同的医生完成,65 例实体标本定位实验由3 位不同年资的外科医生完成。
1.2.1 定位装置设计制作 定位装置包括主件(定位底座、定位臂、定位套筒针)和操控部件(3 轴平移滑台)。使用SolidWorks 2011 设计定位底座和定位臂,底座上有12 个凹槽,可供定位臂插入;定位臂上有7个定位孔,供定位套筒针插入。定位套筒针包括外套筒(外径5.8 mm,内径3.0 mm,长100 mm)、内套筒(外径2.9 mm,内径1.6 mm,长150 mm)、定位针(φ 1.5 mm,长200 mm 的医用克氏针)。装配上述部件之后,所有定位针的轴线延长线相交于一点,即为定位装置中心(图1A)。把定位底座及定位臂分别以STL文件格式导入Cura 切片软件,打印参数设置为层厚0.2 mm 及填充密度20%,打印材料为聚乳酸(PLA)线材,用3D 打印机打印成型。3 轴平移滑台包括3 个行程均为200 mm 直线滑台模组、3 个两相步进电机、3个步进驱动器、1 个明纬开关、1 个运动控制器、4 个模组连接件及4 个模组固定底座。组装上述部件为3 轴平移滑台,各轴最大行程为200 mm,步进角度1.8°,重复定位精度为0.03 mm。通过连接件将3 轴平移滑台与定位底座相连接(图1B)。
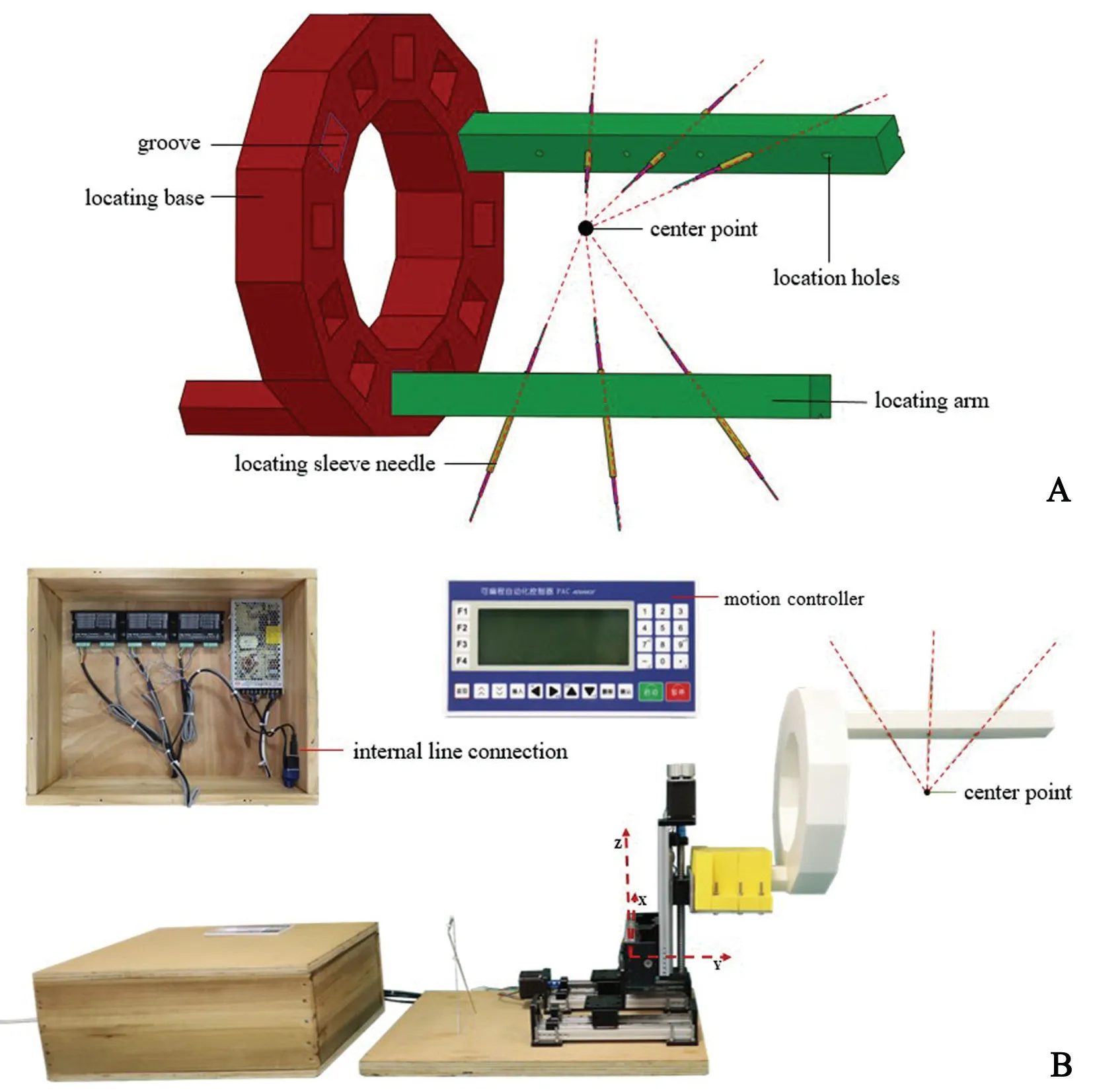
图1 定位装置设计A:定位装置主件 B:主件连接操控部件Fig.1 Design of locating deviceA: Main part the locating device; B: The real object of the locating device
1.2.2 标本造模 以手术尖刀切开长5~8 mm 的小切口,切开皮肤、皮下组织、深筋膜及肌肉,以蚊式钳夹取φ2.0 mm 的金属球置入标本软组织深部。
1.2.3 深部软组织金属异物定位(1)垂直位透视:将标本放置于标本架上,调整C 型臂的位置进行垂直位透视,透视方向与3 轴平移滑台的Z 轴平行,在透视下调节X 轴及Y 轴,直至显示屏上3 根定位针轴线延长线的交点与异物的中心重合(图2);(2)水平位透视:将C 型臂旋转90°进行水平位透视,C 型臂透视方向与3 轴平移滑台的Z 轴垂直,在透视下调节Z 轴,微调X 及Y 轴,直至显示屏上3 根定位针轴线延长线的交点与异物的中心重合(图3),此时,定位装置的中心与异物的中心重合;(3)解剖安全区穿刺:选择安全的解剖区域及手术入路,据此调整定位臂在定位底座凹槽中的位置,通过定位臂的定位孔置入2 根定位针以定位异物,此时,2 根定位针相交于定位装置的中心,亦即异物的中心(图4)。
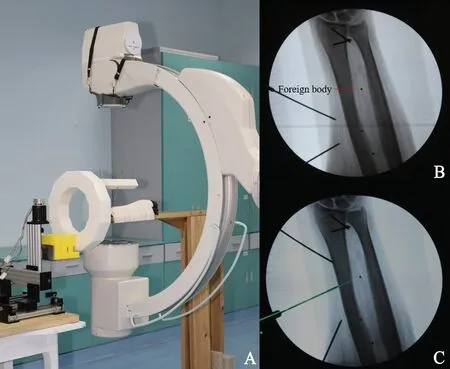
图2 垂直位透视A:设置C 型臂的透视方向与3 轴平移滑台的Z 轴平行 B:透视下调节X 轴和Y 轴 C:3 根定位针轴线延长线的交点与异物中心重合Fig.2 Perpendicular fluoroscopyA: The perspective direction of the C-arm was set parallel to the Z-axis; B: X-ray image before the fluoroscopy regulation;C: The intersection point of the extension line of the axis of the three positioning needles was coincident with the center of the foreign body
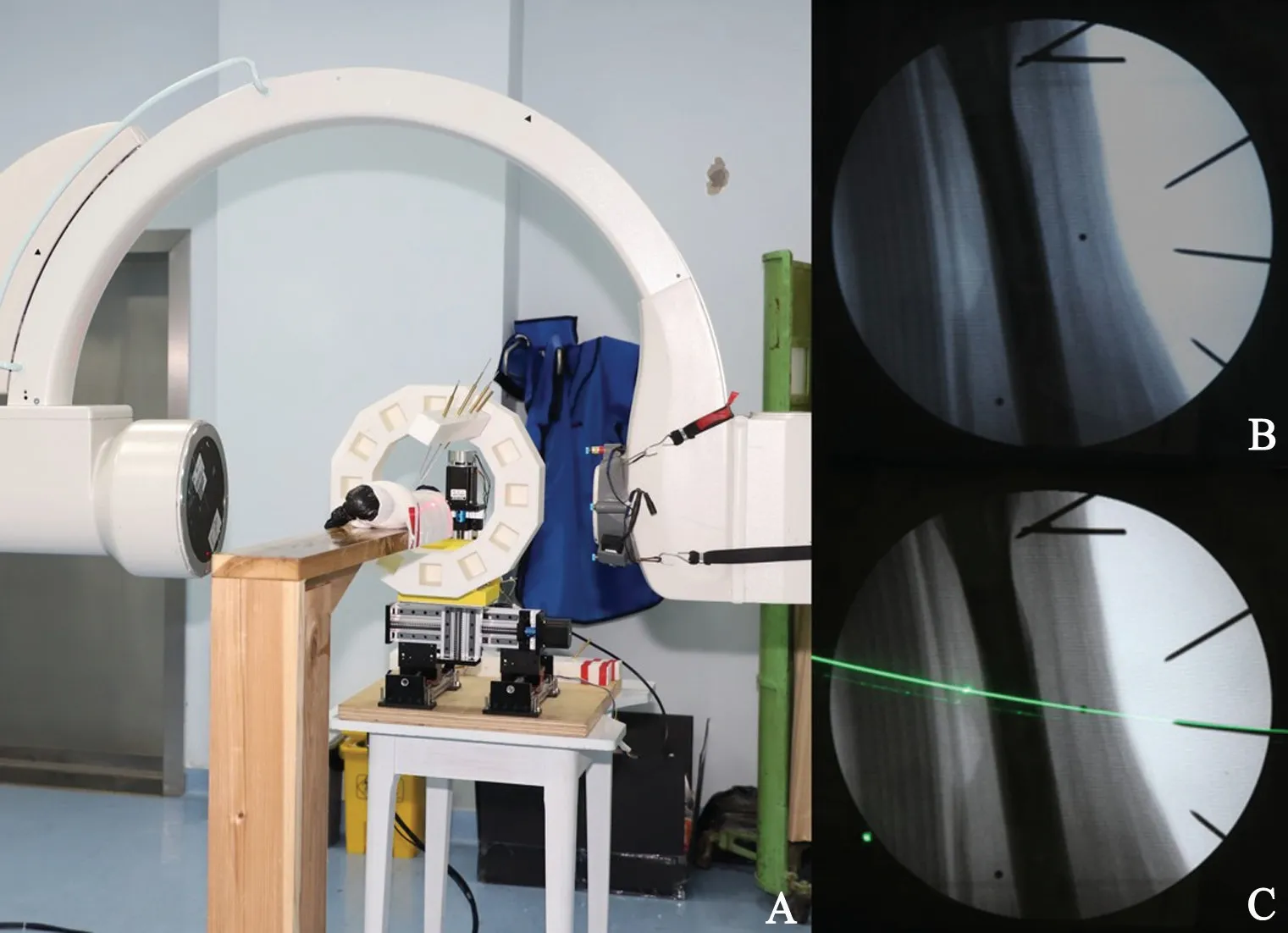
图3 水平位透视A:设置C 型臂透视方向与Z 轴垂直 B~C:调节3 根定位针轴线延长线的交点与异物中心重合Fig.3 Horizontal fluoroscopyA: The perspective direction of the C-arm was set perpendicular to the Z-axis; B-C: The intersection point of the extension line of the axis of the three positioning needles was coincident with the center of the foreign body
1.2.4 实验模拟操作 参考本组前期研究应用Mimics 19.0 软件对标本进行薄层CT 扫描和三维重建[8,9](图5A)。模型处理步骤如下:(1)以Edit mask 命令分别将定位针、异物及皮肤分解(图5B);(2)分别以定位针的轴线为中心轴拟合φ1.5 mm 的圆柱体,两个圆柱体的交点视为定位装置的中心(图5C);(3)以Cut 命令切开异物的中心剖面,该剖面的中心为异物的中心,定位装置中心到异物中心的距离即为定位偏差距离(D1)(图5D)。
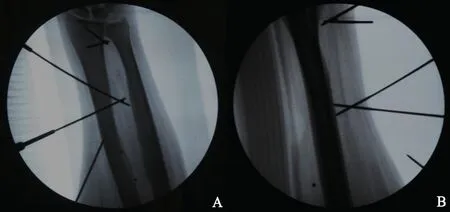
图4 解剖安全区置入定位针穿刺X 线片A:垂直位 B:水平位Fig.4 X-ray films of positioning needles puncturing in safe anatomical areaA-B: Perpendicular and horizontal X-ray image after the placement of locating needles
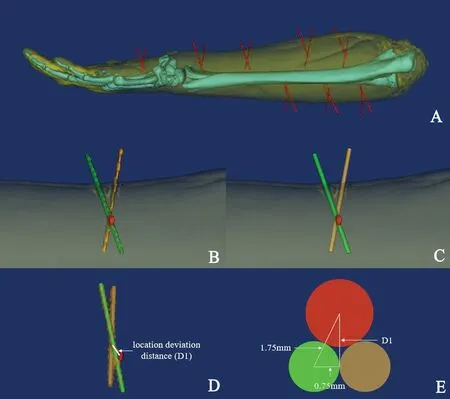
图5 三维模型处理与数据采集A:定位后三维重建 B:定位针、异物及皮肤分解 C:以定位针的轴线为中心轴拟合φ 1.5 mm 的圆柱体 D:定位偏差距离D1 测量 E:最接近理想的D1 原理图Fig.5 3D model processing and data acquisitionA: 3D reconstruction after location; B:Decompose of locating needles,foreign body and skin;C: Fitting of cylinders ofφ1.5mm by the axis of locating needles;D: Measurement of the location deviation distance (D1);E:Schematic diagram of the optimal D1
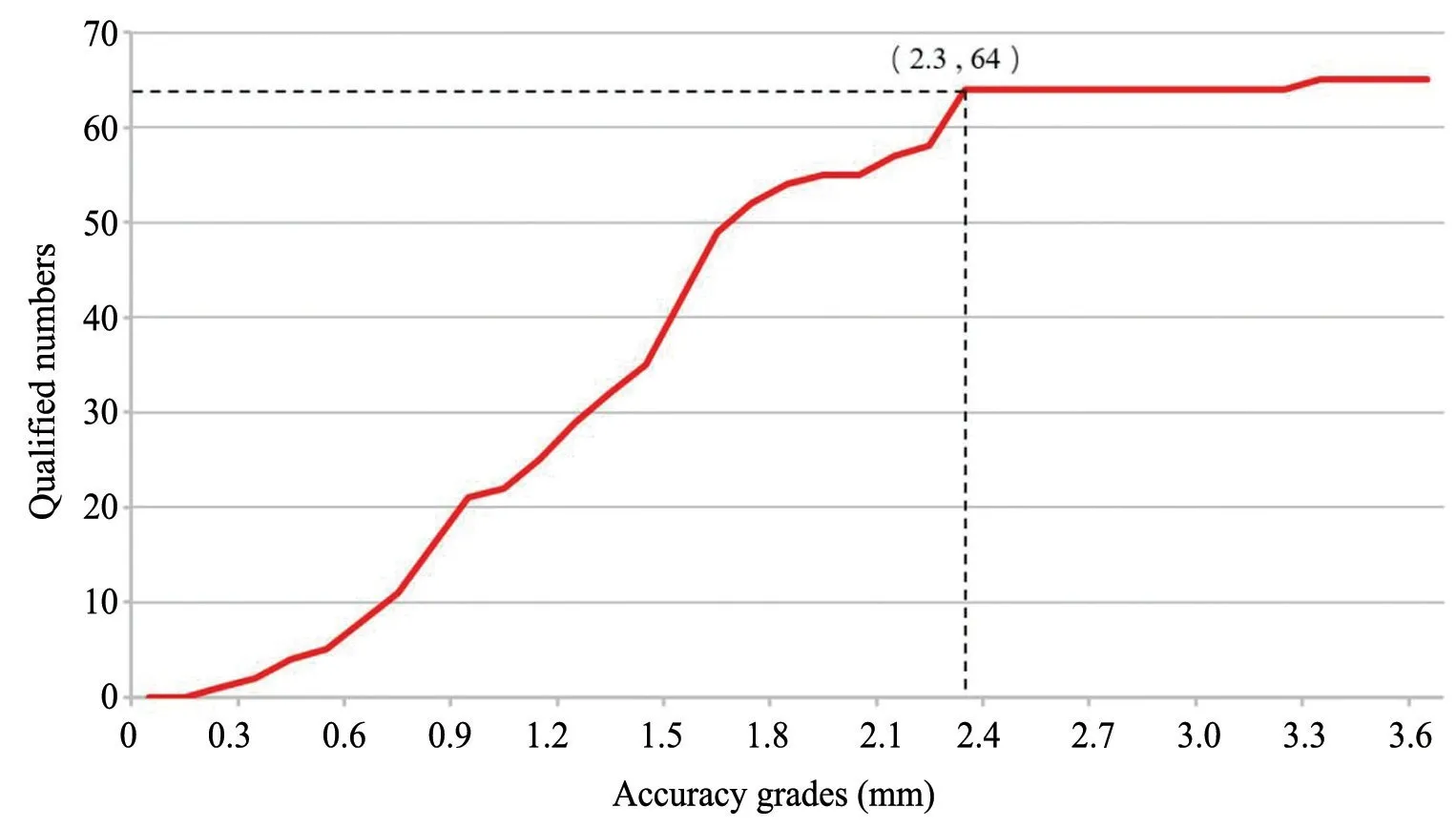
图6 不同精度等级的合格定位数Fig.6 Qualified numbers in different accuracy levels
1.2.5 手术取出异物及数据采集 在定位针导视下逐层切开皮肤、皮下组织、深筋膜及肌肉等组织,直至2 根定位针交叉点平面,在此平面内寻找并取出异物。记录透视时间(T1)和异物取出时间(T2)。T1 为每例异物定位过程中垂直位和水平位透视时间,T2为每例从切开皮肤到取出异物的时间。在实际操作中,当2 根φ1.5 mm 克氏针平行相贴,并与φ2 mm 的金属球相切时,D1 最小(图5E)。可计算出D1 最小值为1.58 mm,则实际定位偏差距离(D2)=D1-1.58 mm。
1.3 统计学分析
从0~5 mm 按0.1 mm 的间隔划分精度等级。如果D2 小于或等于对应的精度等级,则定义为该定位合格;如果D2 大于该精度等级,则定义为不合格。分别统计不同精度等级的合格和不合格数。实验组在不同精度等级的合格数记为n/65;对照组属于本实验设计的理想状态,理论上定位无偏差,65 例D2 均为0,每个精度等级的合格数为65/65。在SPSS 20.0 中用卡方检验比较实验组和对照组在不同精度等级的合格与不合格定位数,当P>0.1 时,对应的精度等级视为定位装置的定位精度。这种用来阐明定位精度等级的统计学方法见本组前期研究[8,10]。
2 结果
所置入的65 例金属异物全部实现精准定位及取出。透视时间(T1)为(46.06±18.44)s,异物取出时间(T2)为(177.10±65.87)s。图6 为不同精度等级(X轴)的合格定位数(Y 轴)。精度等级为2.3 mm 时,P>0.1,两组间无统计学差异,即该装置的定位精度为2.3 mm(表1)。
3 讨论
四肢深部金属异物取出是一个令外科医生头痛的问题;准确的定位是取出异物的前提。影像学技术如透视、超声及CT 是金属异物的重要定位工具。透视辅助定位可以动态实时地对金属异物进行定位[11],然而,其二维影像定位三维空间中的异物需要反复透视寻找,定位的精准度很依赖医生的临床经验;超声辅助定位可以同时定位金属和非金属异物[12],但超声的分辨率较低,只能准确定位表浅的异物,对深部异物的定位效果不佳;CT 辅助定位系统将CT 图像与导航设备相结合[7],是一种三维定位,术者可以更直观地确定异物位置,但是该装置存在CT 扫描误差、配准误差、术中影像漂移等缺点[6]。
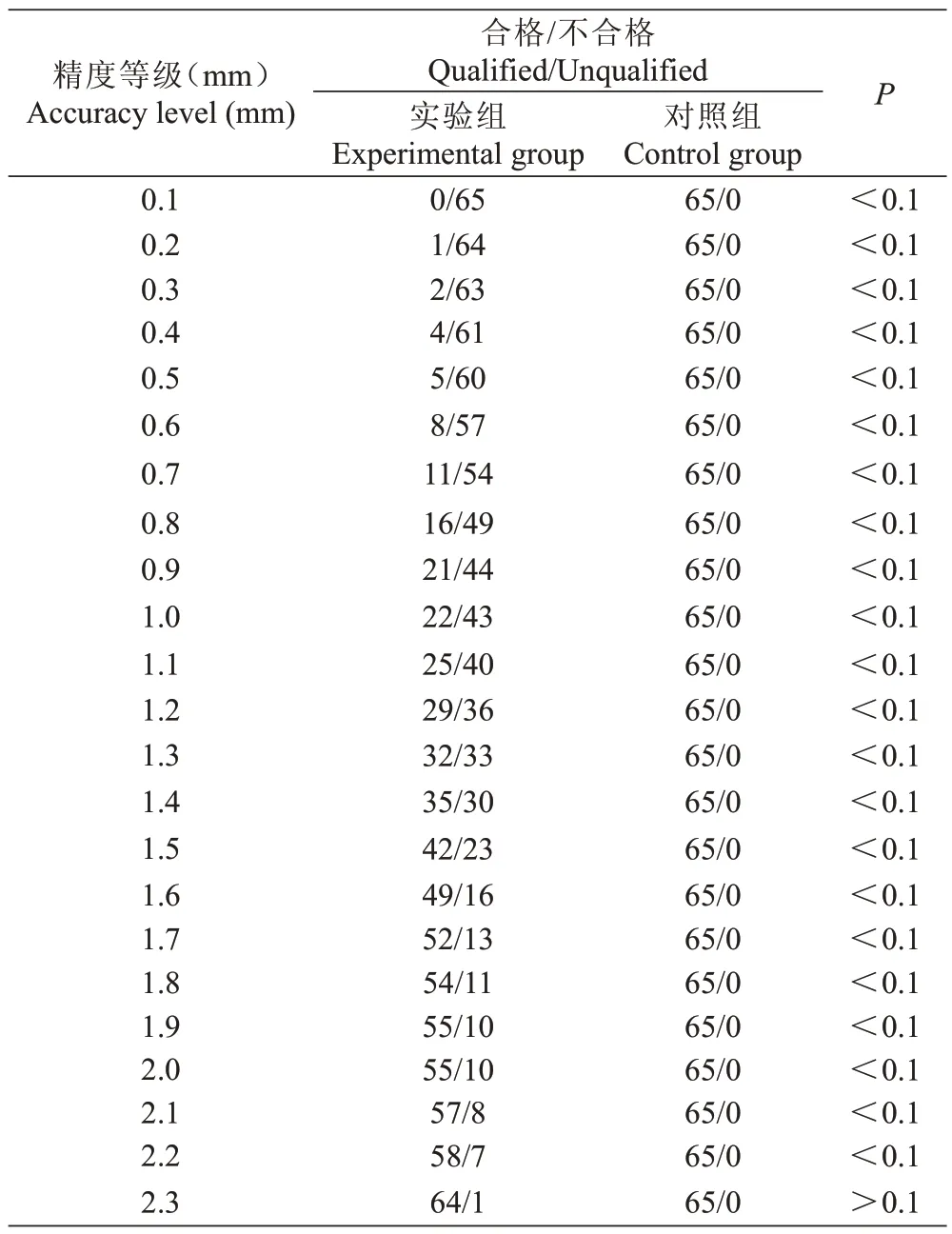
表1 不同精度等级的实验组与对照组的卡方检验Tab.1 Chi-squared test between the experimental group and the control group at different accuracy levels

表2 不同定位技术取出金属异物的指标比较Tab.2 Comparison of different methods for extraction of metallic foreign bodies
以上传统的定位装置是用异物的取出率来评价定位效果,对定位的精度没有进行讨论,因此,难以直观、全面地认识和评价其手术效果。本研究测量了定位异物的实际偏差距离(D2),并将实验组与理想定位结果进行比较,当P>0.1 时,对应的精度等级即为定位装置的定位精度,这样可以更细致地量化评价该装置的定位效果。定位装置精度为2.3 mm,可以满足临床对异物定位的准确度要求。异物中心的坐标设为(X,Y,Z),垂直位透视确定X,Y 轴上的位置,水平位透视确定Z 轴上的坐标,通过两次的二维定位即可完成对三维空间中异物的定位。
辐射的生物效应包括随机效应和非随机效应。随机效应没有阈值剂量,即使低水平的辐射也会发生。长期或大量X 线辐射可增加皮肤癌、甲状腺癌、白内障和血液系统疾病的发病率[13,14]。据报道,法国每年约有2300 例癌症与诊断性电离辐射有关,占所有新发癌症病例的0.7%[15];韩国每年有1915 例癌症病例和637 例癌症死亡病例与医疗辐射有关,占所有新发癌症病例发病率和死亡率的0.9%[16]。因此,临床操作中应尽量减少辐射暴露。然而,传统的定位装置通常使患者和医生暴露在大剂量的辐射下,以往定位异物的平均透视时间为2 min[11]。利用本文新的定位装置,医生可以在手术室外调控三轴平移滑台的运动来定位异物而避免暴露在X 线辐射下;患者的透视时间为(46.06±18.44)s,辐射暴露时间缩短。本定位装置与其它定位技术取出金属异物的比较见表2。微创不仅是指手术切口小,更为重要的是避开血管及神经等重要结构。本研究设计了可拆卸的定位臂,当定位臂插入不同的凹槽时,定位孔的轴线均相交于定位装置的中心。因此,在置入定位针前,可以根据解剖结构及手术入路的需求,选择安全的区域,调换定位臂的位置,使术者在安全的区域操作,避免血管和神经损伤的并发症发生。
该定位装置存在不足之处:C 型臂透视显示范围较局限;定位底座及定位臂采用3D 打印的制造工艺,制造精度存在微小误差;定位针在定位穿刺中因有组织阻碍,会造成微小变形,造成微小误差。
本定位装置是在C 型臂引导下定位并取出异物,除了金属异物,所有的不透X 线的异物(金属、玻璃、小石子等)可以用本设备定位并取出。另外,此设备是一个点定位装置,能够准确地定位三维空间中的一个点,其应用范围还有大的提升空间,后续将进一步研究用于其他需要点定位的手术导航,如全身各部位的穿刺活检、精准置钉以及椎间孔定位等。
