基于模糊PID 的城市污水处理厂自动控制系统的研究与实现
2021-04-19陆婷姬
陆婷姬
(湄洲湾职业技术学院,福建 莆田351254)
近年来,随着社会活动边际的不断扩张和经济的高速腾飞,给我国水生态环境的自我调节能力带来了沉重的负担,安全高效地处理城市污水是有效缓解这一负担至关重要的措施[1]。传统城市污水处理厂针对污水处理过程的控制,主要采用人工经验控制或半自动化控制,由于传统城市污水处理厂建厂时间较早,生产设备相对老旧、自动化水平低,不能满足当今社会日益增长的节能减排需求和可持续发展目标[2]。采用先进智能控制技术,实现污水处理过程自动化控制,提升污水处理工艺水平,不仅可以有效地防止水资源二次污染,同时具有开发新水源的效果,具有重要的经济效益和现实意义。
本文针对福建省莆田市某污水处理厂现使用的生产工艺进行分析归纳,提炼出污水处理工艺过程的三步骤:预处理、二级处理以及后续处理。在此基础上,依据污水处理厂设计原则和实际需求,提出污水处理厂自动控制系统的总体设计方案,确立了污水处理自动控制系统以“总控层-中间层-作业层”自上而下的三层架构。通过研究污水曝气过程控制策略,分析传统PID 控制的局限性,提出一种基于模糊控制和PID控制相结合的参数模糊自适应PID 控制算法,最后实现基于模糊PID 的城市污水处理厂自动控制系统。
1 系统总体设计方案
本文针对福建省某污水处理厂现使用的生产工艺进行分析归纳,污水处理厂进行污水处理时主要分三步骤:预处理、二级处理和后续处理,具体工艺如下:
预处理过程[3]:污水通过进水总管进入到进水闸门井中,通过闸门控制后流入粗格栅池进行第一次截留,污水中直径大于20 mm 的漂浮物等,通过输送机清渣后输送到格栅外,粗格栅出来的水以重力自流的方式进入进水泵房。再由污水泵提升至细格栅槽进行第二次截留,直径大于5 mm 悬浮物或漂浮物将进入栅渣溜槽,由外界厂区增压泵压入清水,将溜槽内悬浮物、漂浮物输送至压榨机,经过清洗压榨后输送到溜槽外,经过粗格栅、细格栅二次截留后的污水流入曝气沉砂池。
二级处理过程[4]:污水流入沉砂池时,罗茨鼓风机房通过空气扩散管进行曝气,把污水表面附着的有机物磨去,曝气沉砂池曝气过程中产生的尾气,通过生物除臭后排到大气中,经过曝气沉砂池处理的污水流入生化池中的厌氧区,污水在厌氧区内进行推流式运动,推流后的污水通过内循环输送至缺氧区,发生反硝化反应脱氮,之后进入好氧区进行硝化反应,脱磷及去除BOD。
后续处理过程[5]:生化池处理后的混合液流入二次沉淀池,该池可加速沉淀并形成污泥,利用刮泥机将污泥刮至出泥槽,再输送至污泥浓缩池中,刮泥后的污水汇集后经提升泵提升至高效沉淀池,高效沉淀池中的污水通过搅拌、投加药剂后,污水中的悬浮物将凝成污泥下沉,污泥汇集至池底,由循环泵抽送至污泥浓缩池,与二次沉淀池中刮出的污泥一起通过污泥管输送至贮泥池后,送至脱水机房进行脱水处理,脱水后的污泥形成泥饼,经过卸车柱塞泵输送至运泥车送出厂外,其余污水则流入V 型滤池中的砂滤池进行过滤,滤池中对滤料进行冲洗后流入消毒池,经过加药消毒处理后流入综合泵房,综合泵房的净化水根据具体使用情况,分为3 种流向[6]:(1)净化水通过滤池反冲洗泵,用于V 型滤池的反冲洗系统进行滤料冲洗;(2)净化水通过再生水泵排出,用于冲洗、绿化回灌等;(3)净化水通过尾水泵进入到紫外消毒系统,经过巴氏计量槽流量统计后,流出的水需达到排放标注。图1 为某污水处理厂平面示意图。
针对上述污水处理厂生产工艺和实际需求,确定污水处理自动控制系统以“总控层-中间层-作业层”自上而下的三层架构,图2 为系统总体设计图。
总控层设立在污水处理厂办公楼控制室中,主要实现在线监视、控制及数据存储功能。总控层设立两台控制机,其中一台为主站,一台为备用站,两台设备与现场进行网络通讯,功能相同,且互为备份。当主站发生故障时,立即切换至备用站,当主站恢复正常时,则重新将主站变为主控制机,备用站重新恢复热备状态,同时同步更新所有数据。除了控制功能外,总控层功能还包括历史数据存储分析、告警等功能。
中间层借助污水处理厂内部网络实现整个系统的数据传输,系统可以通过websocket 通讯协议将总控层的控制命令下达现场层的各个设备,如粗格栅、细格栅、提升水泵、鼓风机、吸泥泵、螺杆输送泵、加药机、带式压滤机等。也可以将现场层部署的仪器系统数据反馈给总控层,如分体式超声波液位计、超声波液位计、压力机、空气流量计、DO 测定仪、污泥浓度计,帮助总控层实时掌握现场情况,保证生产安全和高效。
作业层主要包括各个污水处理设备和对应的仪表装置,各仪表装置可以将4~20 mA 的模拟信号和普通开关量信号转换成数值信号通过中间层进行传输,以此完成对污水处理设备的控制和控制数据的采集。
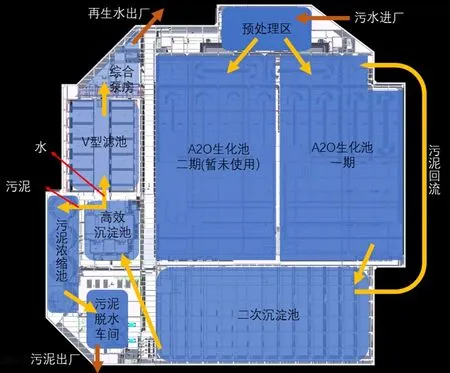
图1 某污水处理厂平面示意图
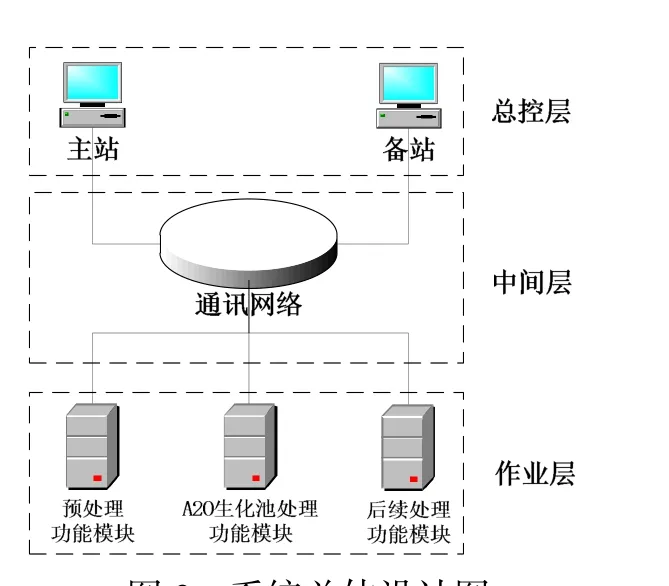
图2 系统总体设计图
2 基于模糊PID 控制污水曝气过程控制策略研究
传统PID 控制算法原理虽然十分简洁,实现难度小,但算法超调量大,过渡时间长[7];而模糊控制虽然不依赖高精度的数据模型,具有较强的抗干扰能力,但存在一定的静态误差[8]。本文将两种算法结合应用到污水处理曝气控制过程,该算法主要由两部分组成:传统PID 控制器和模糊控制自适应调参。传统PID设计可按照污水处理厂现有控制理论进行设计,模糊控制自适应调参部分作为添加组件接入原控制系统中,将偏差E 和偏差的变化率EC 作为模糊控制自适应调参部分的输入量,将优化后的3 个PID 参数Kp,Ki和Kd的变化值作为输出,实时修正传统PID 控制器的参数,从而实现控制算法的优化,具体算法设计如下:
(1)控制策略输入和输出变量的明确。污水曝气过程目标控制参数为污水二次处理过程中生化池溶解氧的浓度,将误差E 和误差变化EC 作为基于模糊控制的PID 控制算法的输入量,将ΔKp,ΔKi,ΔKd明确为单个模糊控制策略的输出变量同时作为PID 控制器的输入变量,最后将实际PID 控制量作为整个策略的输出变量。
(2)模糊控制策略部分模糊集合的明确。将该集合设置如下:{NB,NM,NS,ZE,PS,PM,PB},其中,NB 代表负向最大,NM 代表负向中等,NS 代表负向最小,ZE 代表zero,PS 代表正向最小,PM 代表正向中等,PB 代表正向最大。
(3)模糊推理模糊决策及解模糊。本文采用Mamdani 推理方法进行推理(极大极小值法)[9],针对PID三个控制参数变量各自可以输出一个模糊集合,由于PID 控制器只能对确定量做出反应,所以本文选择加权平均法对模糊量进行解模糊,如下式所示:
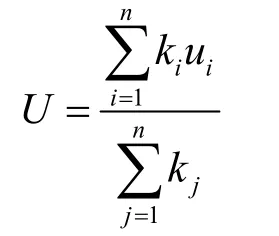
其中,U 为模糊量解模糊输出值,系数ki的选择根据实际情况而定。不同的系数决定系统具有不同的响应特性。根据各模糊子集的隶属度赋值表和各参数模糊控制模型,应用模糊合成推理设计参数的模糊矩阵表,如表1~3 所示。
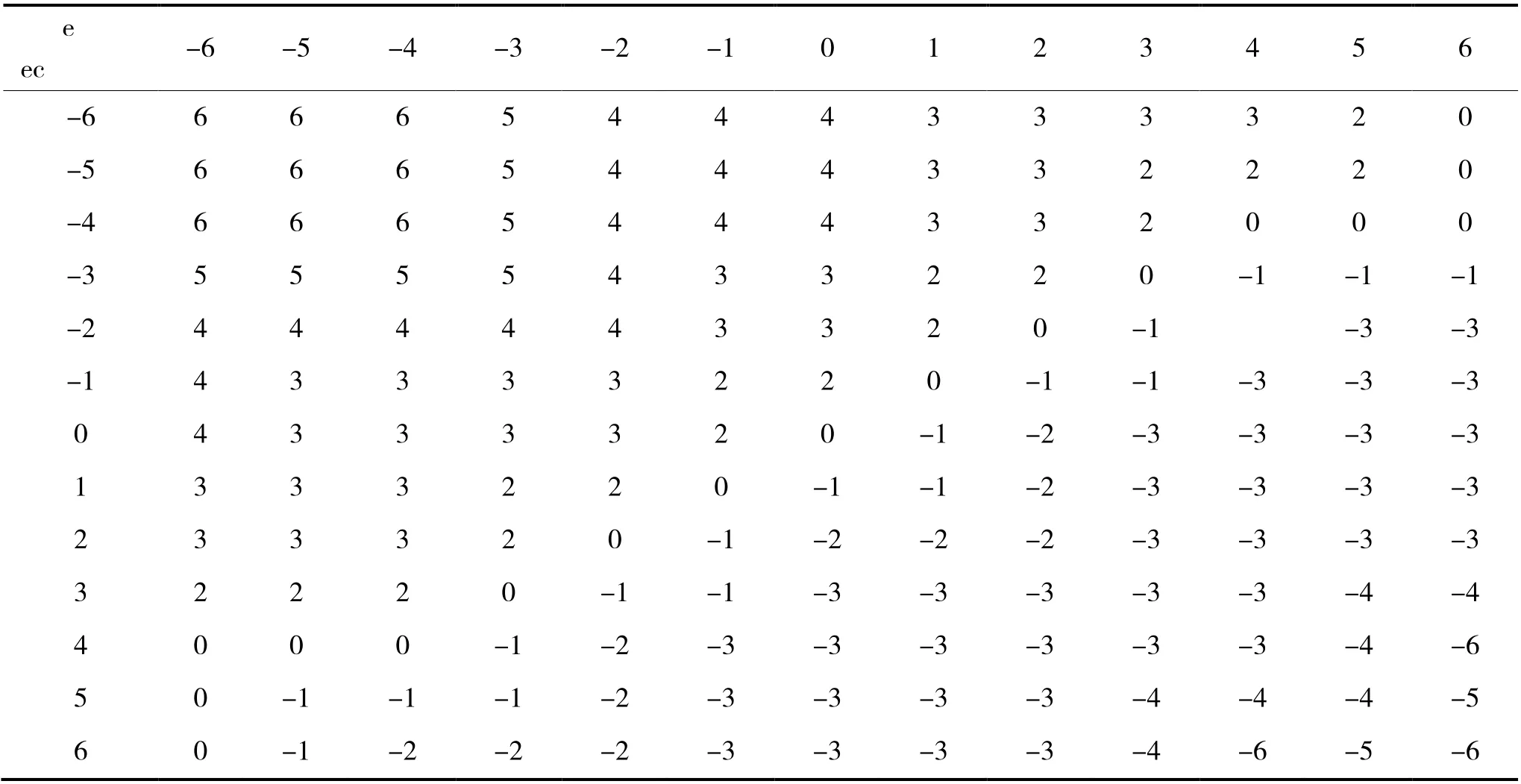
表1 ΔKp 的模糊矩阵表
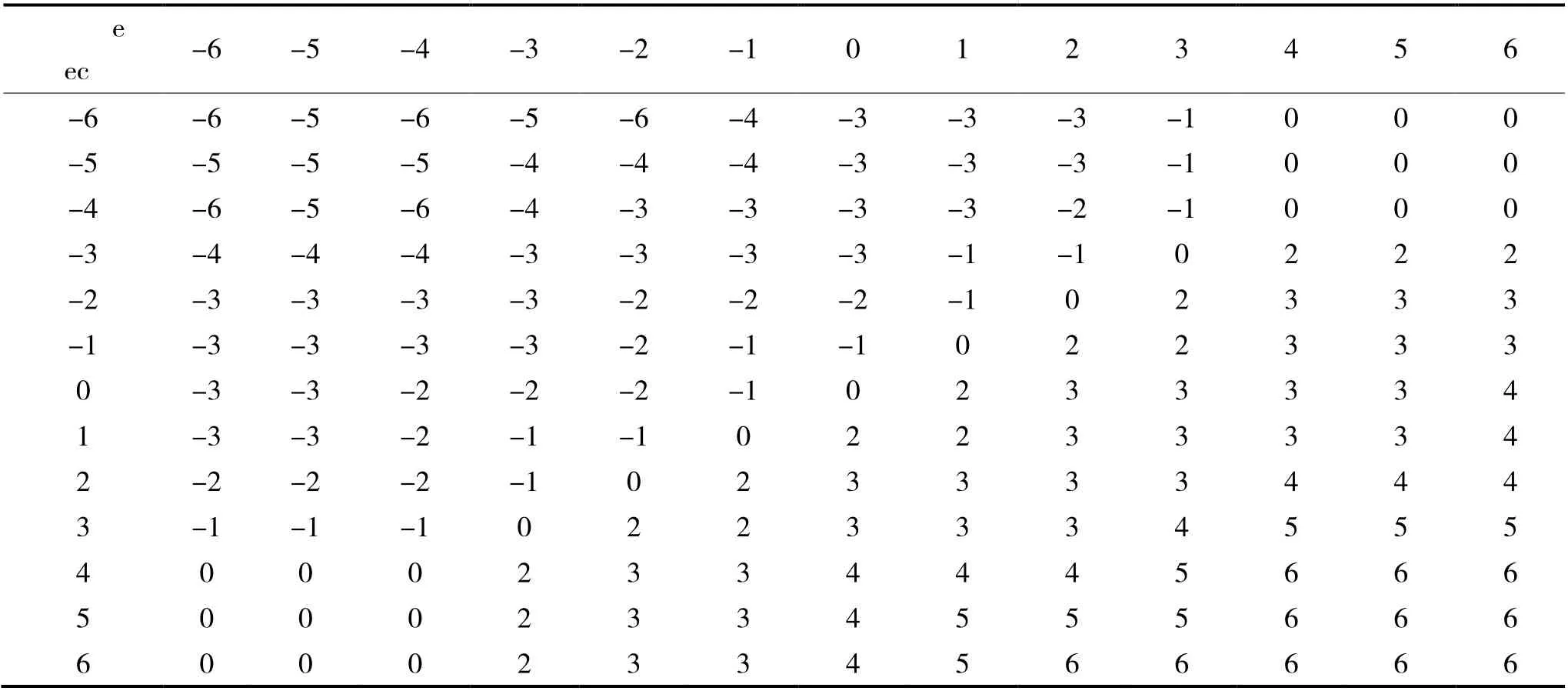
表2 ΔKi 的模糊矩阵表
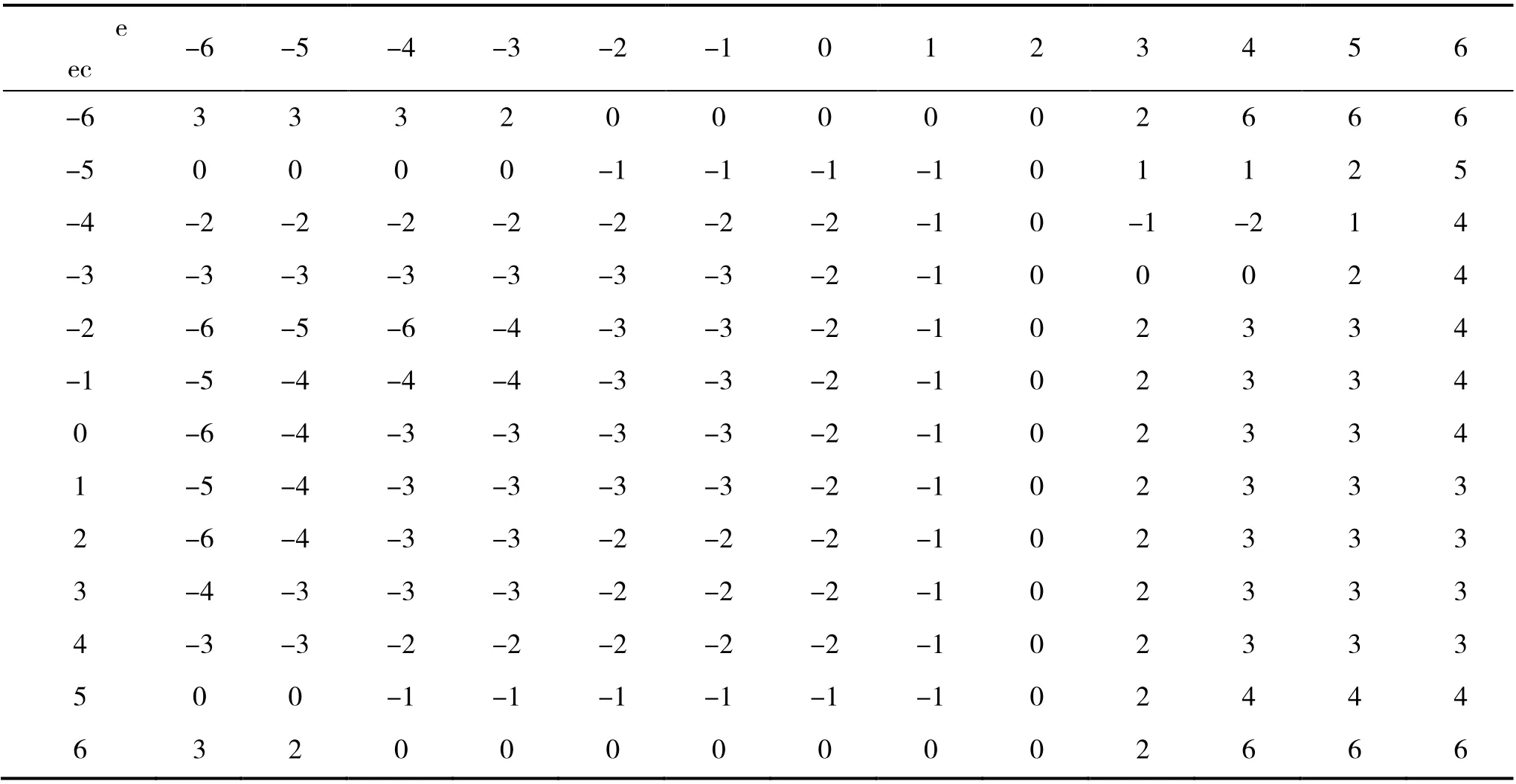
表3 ΔKd 的模糊矩阵表
查出修正参数代入下式计算:

在线运算时,系统通过对规则的结果处理查表和运算,完成对PID 参数的在线自适应。
3 应用实例
本文从总控层系统抽样选取了污水处理厂采用基于模糊PID 的城市污水处理厂自动控制系统的运行效果,如表4 所示。
在实际污水处理自动控制系统使用过程中,如图3 所示,通过单一变量法将模糊PID 控制曝气量与传统人工控制曝气量进行对比,传统人工控制的曝气量,由于主要是依靠长年累月的主观经验进行控制,导致曝气量均值和方差都比模糊PID 控制要来的大。
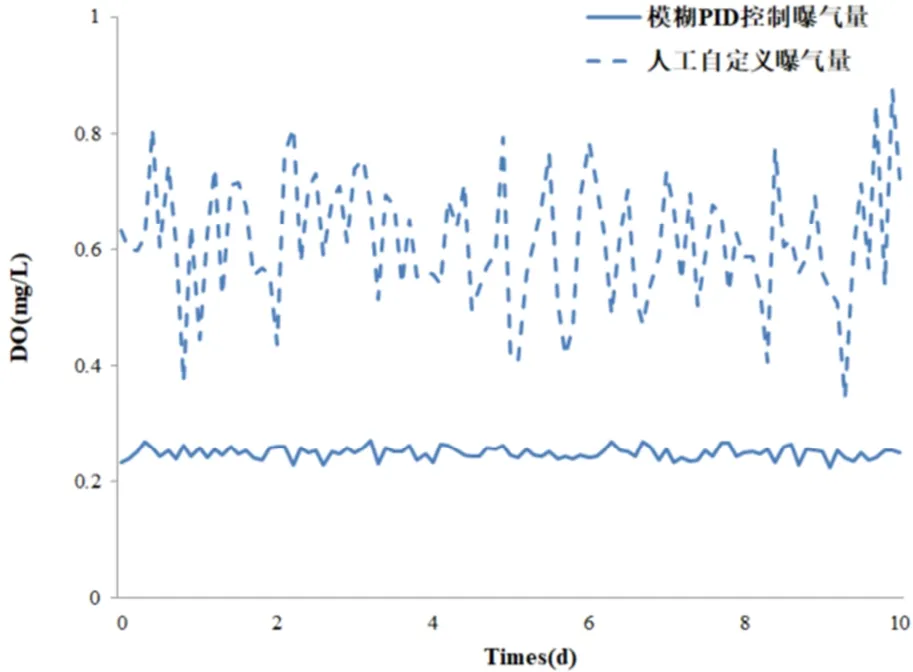
图3 系统曝气控制效果分析
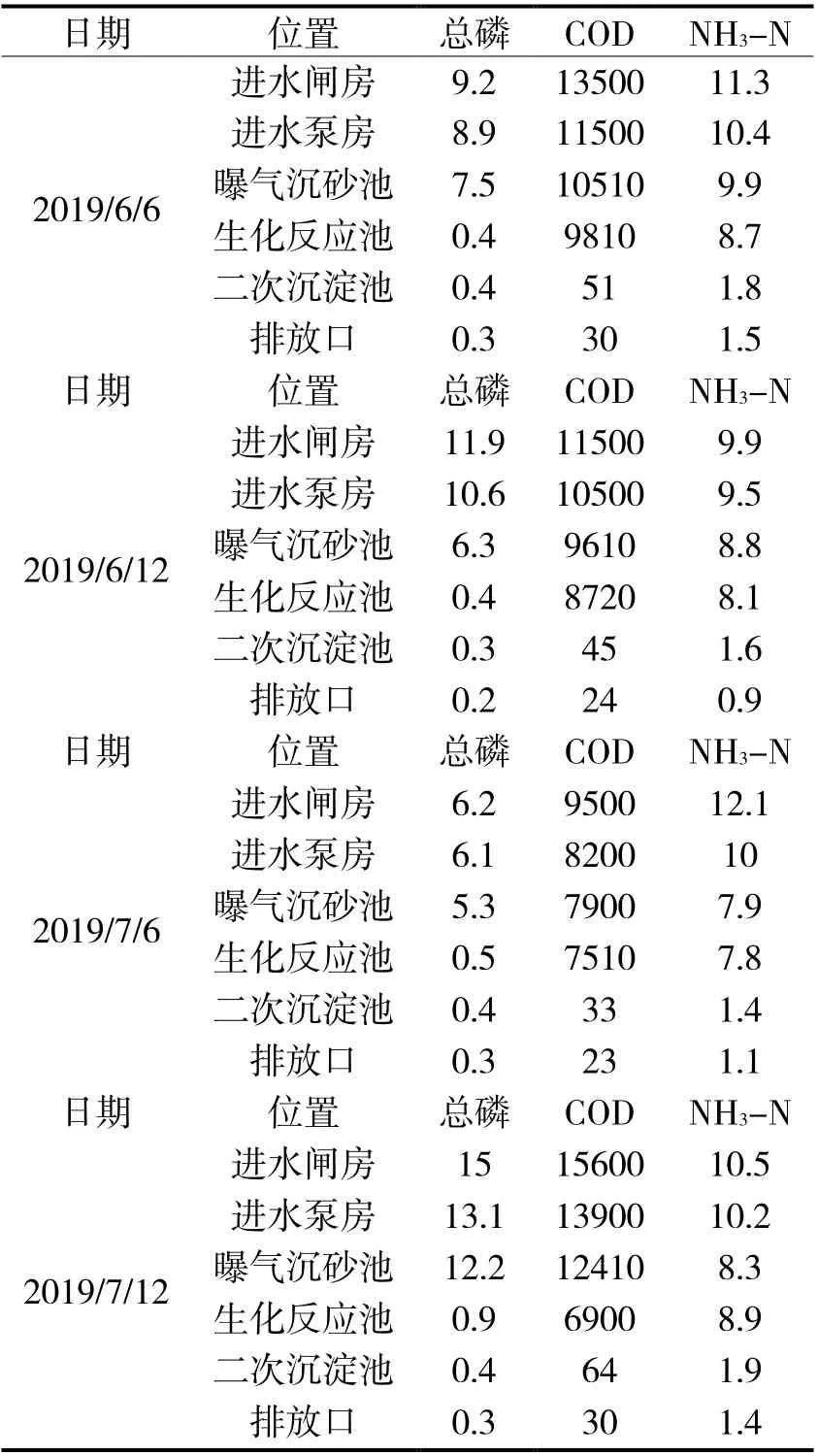
表4 污水处理参数 mg/L
综上所述,在实际生产运营过程中,污水处理厂自动控制系统相对传统人工主观控制,不仅改善了传统人工控制滞后性主观臆断的缺点,提升了控制精度,提高了经济效益和安全边际,而且系统运行状态稳定,污水处理排放效果良好,符合DB14/1928-2019《污水综合排放标准》的一级标准。
4 结束语
本文对福建省某污水处理厂现使用的生产工艺进行分析,对厂内已有控制系统进行研究,提炼出污水处理工艺过程的三步骤:预处理、二级处理以及后续处理,并制定相应的工艺流程。在此基础上,依据污水处理厂设计原则和实际需求,提出污水处理厂自动控制系统的总体设计方案,确定了污水处理自动控制系统以“总控层-中间层-作业层”的三层系统架构,通过研究污水曝气过程控制策略,提出一种基于模糊控制和PID 控制相结合的参数模糊自适应PID 控制算法,最后设计一套污水处理厂自动控制系统。
