自动化生产线搬运机械手控制系统的设计
2021-04-19李金斗
李金斗
(齐齐哈尔工程学院,黑龙江 齐齐哈尔 161005)
1 机械手整体设计
1.1 机械手整体结构设计
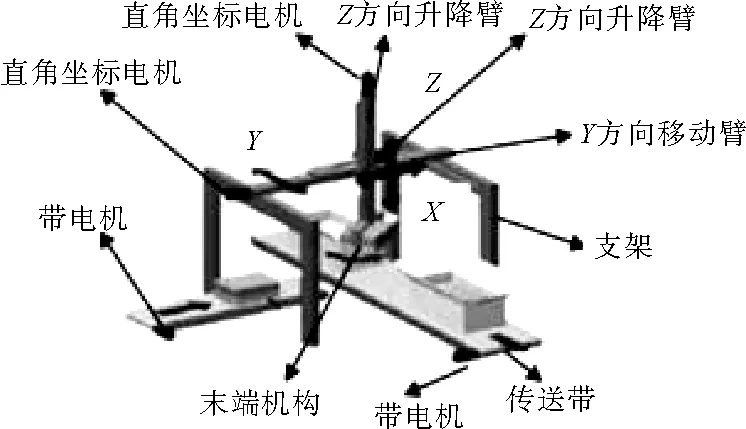
图1 机械手三维视图
本文设计的机械手属于典型的直角机械手。主要组件是支架、电机、吸盘、Y方向上的移动壁和Z方向上的吊臂。图1是操纵器的三维视图。与这个数字结合起来并不难发现。要沿Y方向移动,需要依靠导轨系统。双面龙门架和两侧带有导轨的机架构成了机械手的基础。机械手通过滑块固定。机械手的Y方向移动臂由齿轮、减速器和齿轮固定。伺服电机的旋转使齿条机构在滑块上移动,并完成Y方向上的前进/后退运动,因此,精确控制伺服电机可以实现Y方向上的精确运动和定位。
1.2 气缸的选型
整个机械手装置的参数设计非常重要,首先,液压缸是气动控制回路系统中的重要执行元件,本文的设计使用了直线运动液压缸。 根据码垛产品的平均尺寸和重量,钢瓶参数计算如下:使用的气缸类型为SC32X25,气缸直径75mm,最大行程300mm。
1.3 具体设计
具体设计主要包括气缸选择,气动元件选择,电气元件选择和吸盘末端力计算。具体设计细节如下:油缸选择,直线运动油缸,码垛产品的平均重量和尺寸,当使用SC32X25型油缸时,该油缸的最大行程为300mm,内径为它是75mm。气动元件的选择使用无油静音空气压缩机,4V330-10电磁方向控制阀和ZP吸盘作为空气压缩机,这3个品牌分别是PANDA、德力西和SMIC。电气元件的选择包括80O AEAO7530-SC3型伺服电动机,YZ-ACSD608型电动机驱动器和PLX型电动机减速器,品牌为时代超群、Freud和MOVING。结合图1可以很容易地计算出机械手的末端力,即机械手的末端执行器的机械臂需要跟随该机械手。因此,需要一个公式来计算吸盘的直径。公式C,t和n分别是堆叠重量和安全系数。抽油杆的数量,R是抽油杆的直径。由于平均负载重量为2000N,一个吸盘的直径为160mm,因此水平吸盘下的吸盘真空度为39808.9MPa。对于某些设计,应使用最大真空的40%~60%之间,以确保抽油机的涂层质量。
2 控制系统设计
机械手控制系统具有手动、单循环、单步、循环等工作模式。控制要求如下:按下复位按钮,将其返回到其原始位置(机械手处于上下限)。单步表示每次按下启动按钮时,机械手执行一个动作。一个周期是一个动作周期的执行,最终返回其初始位置。循环表示操纵器重复执行操作,直到按下复位或停止按钮。机械手的控制/操作电路由PLC程序实现,分为自动程序和手动程序,该自动程序包括一个步骤,一个周期和一个周期性的工作程序。本手册主要用于硬件调试。如果在梯形图中使用跳转指令,则自动程序和手动程序将不会同时执行。根据系统的控制规律,下一步的工作条件是基于上一步已完成的假设,因此采用了顺序功能图的设计方法。机械手系统自动控制程序的顺序功能。
2.1 系统硬件组成
机械手控制系统的硬件配置包括主控制器PLC和外部输出设备。主控制器使用三菱PLC,它包括电源、存储器和通信端口。输入设备包括传感器、控制按钮、控制面板和触摸屏,输出设备主要包括逆变器、电磁阀、负载和继电器。
2.2 主控电机电路设计
采用西门子公司生产的S7-200CN 40点PLC,其自动循环操作完成时间8s、手动操作完成时间为12s,采用FR-E540-25K-CHT型变频器,并采用标准配置USB编程。使用VFD-E型RS-485通信扩展板来满足通信需求。当棍道上有产品传送时,可以使用高速模式,快速将待检产品传送到工位,当玻产品定位的时候使用中速模式,方便传感器定位。当辗道上产品取完时,使用低速模式,减少辗道机械磨损的同时延长设备使用寿命。
2.3 PLC编程
机械手控制系统具有2种主要控制模式。手动开关控制和触摸屏控制。主控制器上Mitsubishi PLC的IO端口用作输入和输出,以控制整个机械手的操作。对于手动控制,需要8个开关来控制X、Y和Z方向上的输出伺服电动机,并且终端输出会夹紧电磁换向阀,这对于手动调试和维护很有用。在触摸屏控制模式下,有单循环和自动循环。单击触摸屏上的软开关,将命令发送到触摸屏上的辅助继电器M,以控制输出线圈的变化。其中,M1是单周期和自动周期选择命令,M2是复位命令,M3是启动命令,MO是备用命令。
2.4 伺服电机控制模型
机械手控制系统分为发送模块和处理模块。皮带轮传动和操纵机械手在X、Y和Z方向上的运动主要由伺服电机控制。机械手可以完成多个过程,例如向左移动,向右移动、向前、向后、向上、向下、夹紧和松开。因此,伺服电动机控制的研究对于机械手的移动位置和速度非常重要。
3 结语
设计的机械手是一种直角坐标式的机械手,可以帮助我们执行装置伺服电机以及气缸。结合现有的多自由度坐标系统机器人,可以设计新型的码垛和装卸机械手,为企业自动化生产奠定良好的基础。在实际的制造测试中,使用PLC技术和伺服控制技术来控制码垛和装卸机械手,以便可以牢牢地抓住它们并将其稳定地放置在检查柜的每一层上,并最终快速地完成。说明实现了有效的生产,降低了生产成本,提高了生产效率,满足了企业的生产要求。由定序器设计的机械手电气控制系统电路简单,可靠性高,功能强大,整个系统稳定,准确地运行。同时,可以根据需要进行扩展。结合自动化机床,可以构建自动化生产线。