基于水下传感器网络的目标跟踪技术研究现状与展望
2021-04-18刘妹琴韩学艳张森林郑荣濠兰剑
刘妹琴 韩学艳 张森林 郑荣濠 兰剑
海洋蕴含丰富的自然资源,不仅是人类社会赖以生存繁衍和社会实现可持续发展的重要战略空间,同时也是国家安全的重要保护屏障.近年来,随着世界各国对海洋资源的开发和利用,我国与周边国家在领海主权和海洋资源开发等方面的竞争日益激烈,水下目标跟踪技术作为海洋科学领域的重要研究方向之一,在军事领域和民用领域都起到了举足轻重的作用[1].在军事领域,通过快速获取敌方目标的位置、速度、加速度等状态信息,可以有效防御和打击敌方入侵的舰船、鱼雷、潜艇以及水下机器人等.从某种程度上来说,水下目标跟踪技术是维护国家权益、捍卫国家主权、保护国家安全的重要组成部分.在民用领域,水下目标跟踪技术在水下目标的搜救、水下机器人的智能控制、海洋生物资源的保护等方面都发挥着重要作用[2].
传统的水下目标跟踪技术主要有基于声呐图像的目标跟踪和基于声呐阵列的目标跟踪.基于声呐图像的目标跟踪主要利用目标物的反射回波实现目标的探测与跟踪.它不但可以获得有关目标的位置、速度等运动信息,还可以通过声成像获得的视频和图像信息提供有关目标的视觉信息,如形状、纹理以及边界等.但是它受水体环境因素的影响比较大,导致应用场景十分有限[3].基于声呐阵列的目标跟踪一般需要将声呐阵列固定在船底或以船舶拖曳的方式进行工作,在一些苛刻的环境条件下可能无法使用.因此,其跟踪范围和工作时间受船舶活动范围和时间的限制,而且一旦船舶出现故障或遭受攻击,整个系统将无法继续执行跟踪任务[4].近年来,随着无线传感器网络(Wireless sensor networks,WSNs)技术的快速发展和日益成熟,水下传感器网络(Underwater sensor networks,USNs)及其相关技术的研究与应用也在世界各国掀起一股热潮[5−6],各个国家都大力支持USNs的研究和开发工作.USNs不仅具有成本低廉、结构自组织、容错性强、隐蔽性强以及快速部署等优势,而且它采用分布式部署的方式,可以实时、连续、全天候地获得多维度、互补性的目标量测信息,使得对目标的探测与跟踪不再受空间和时间的约束.通过各节点之间的信息共享和协同工作,USNs可实现较高的目标跟踪精度.
随着USNs的快速发展,基于USNs的目标跟踪技术也逐渐受到各界的密切关注[7−8],其具有跟踪更可靠、跟踪更及时、跟踪范围更广以及跟踪精度更高等优点[9].但是,由于水下环境的复杂多变,基于USNs的目标跟踪技术也面临诸多挑战[10−11],如通信时延较高、通信带宽受限、杂波和多径效应严重、量测丢失、网络的能量资源有限等[12].虽然针对陆上WSNs的目标跟踪技术已经相当成熟,但考虑到USNs的特殊性,陆上的目标跟踪技术并不能直接应用到USNs,应该研究切合USNs特点的水下目标跟踪技术.
本文系统梳理了基于USNs的目标跟踪技术的相关成果.如图1所示,下文将分别从水下传感器网络、目标跟踪系统模型、单目标跟踪技术、多目标跟踪技术以及能效优化措施几个角度来概述基于USNs的目标跟踪技术的相关理论成果及其研究现状.最后,本文探究了目前该领域存在的主要挑战,并对该领域未来的发展趋势进行了展望.
1 水下传感器网络
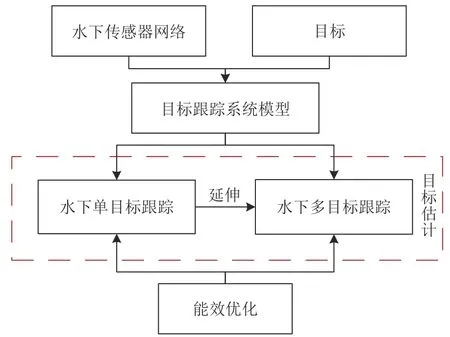
图1 基于USNs的目标跟踪技术Fig.1 Target tracking technologies via USNs
USNs在国内外受到了广泛的关注和重视,目前已有不少文献对国内外USNs的建设现状进行了详细的综述[13].在此基础上,本文重点对国内外典型USNs硬件平台的建设概况进行简要介绍.此外,为使读者对USNs有更加清晰、直观的认识和理解,本文进一步介绍了USNs的系统组成及其分类.
1.1 水下传感器网络的建设现状
1.1.1 国外水下传感器网络的建设现状
国外对USNs相关技术的研究起步相对较早,自20世纪末,美国、加拿大、日本、以及欧洲各国就凭借各自在海洋观测领域的先发优势,纷纷投入巨资来支持USNs 关键技术的研究和开发工作.
1)美国USNs的建设现状
美国是最早部署USNs的国家,其在USNs领域的研究水平和取得的成果一直处于世界领先地位.在军事领域,比较典型的有:遥测前沿观测网(Front-resolving observational network with telemetry,FRONT)[14]、可部署分布式系统(Deployable autonomous distributed system,DADS)[15]以及2005 年提出的“近海水下持续监视网络”(Persistent littoral undersea surveillance network,PLUSNet)计划[16]等.其中,PLUSNet是以水下潜/浮标为固定节点、水下无人平台为移动节点构建的混合型网络,是目前世界上最先进的水下网络,主要用于浅海环境中安静型潜艇的大范围探测与跟踪,并为巡航导弹、潜艇提供导航.在民用领域,最典型的是2016年6月正式启动运行的“大洋观测计划(Ocean observation initiative,OOI)”[17].它是一个基于网络的长期海洋观测系统,包含850个观测仪器,由1个包含7 个海底主节点的区域观测系统,2个近岸锚系观测阵列以及4个全球观测阵列构成.OOI系统可以实现从陆地到深海、从海底到海面的全天候、全方位立体观测.
2)加拿大USNs的建设现状
加拿大最典型的USNs是2009年建成并运行的“海王星”海底观测网(North-east Pacific timeintegrated undersea networked experiment,NEPTUNE)[18]和2006年建成的金星海底观测网(Victoria experimental network under the sea,VENUS)[13].NEPTUNE是世界上首个深海海底大型联网科学观测网络.它主要由岸基监控中心、海底光缆传输网络以及海底观测传感仪器三个部分组成.它通过海底光电缆将6个海底主节点相联构成800 km环形主干网络,每个节点可连接多台海底观测仪器,覆盖了离岸300 km范围内17m~2 660 m不同深度的典型海洋环境.它的建成是海洋科学发展史上的一个重要里程碑.其建设过程和管理经验为世界其他类似海底监测系统的建设提供了宝贵经验.VENUS主要用于研究海洋生物作用和三角洲动力学,同时为海底观测技术提供试验基地.
3)日本USNs的建设现状
日本是一个地震多发的国家,为实现地震和海啸的实时观测和有效预警,日本先后建设了地震和海啸海底观测密集网络(Dense ocean-floor network system for earthquakes and tsunamis,DONET),DONET2[19]以及日本海沟海底地震海啸(Snet)观测网[13]等.2011年建成的DONET是世界上最精密的地震海啸海底光网络,共有5个科学节点,22个观测站,海底光缆总长300 km.2016年建成的DONET 2,共有2个登陆站、7 个科学节点和29个观测站,海底光电缆总长450 km.2015年建成的S-net观测网是迄今为止全球规模最大的海底光缆网络,缆线总长5700 km,由6个系统组成,每个系统包含800 km长的缆线和25个观测站.这三个网络的建成覆盖了从近岸到海沟的广大海域,为日本实现对地震和海啸的高精度实时监测和有效预警提供了保障.
4)欧洲USNs的建设现状
欧洲海底观测网(European sea floor observatory network,ESONET)是由欧洲14 个国家于2004年共同制定,是分布在欧洲的一个大范围、分散式的科学观测网[20].该系统在大西洋和地中海精选了10个海区进行设站建网,进行长期的海底观测,主要包括15个海洋观测主基站(11个深海主基站和4 个浅海试验基站).该系统可实现对海洋多学科、多目标、多时空尺度的观测研究.
1.1.2 国内水下传感器网络的建设现状
目前,我国针对USNs的研究仍处于起步阶段,为更好地推动我国USNs的建设,提升我国的海洋综合实力,国家抓紧做好各项海洋战略顶层设计[21].在国务院2013年出台的《国家重大科技基础设施建设中长期规划(2012−2030年)》中指出,将优先安排包括海底科学观测网在内的16项重大科技基础设施建设[22].2014年12月,国家海洋局印发的《全国海洋观测网规划(2014−2020)》明确:到2020年,我国将建成以国家基本观测网为骨干、地方基本观测网和其他行业专业观测网为补充的海洋综合观测网络,初步形成海洋环境立体观测能力[23].
我国已陆续开展海底观测网关键技术的攻关及其试验系统的研究和建设工作.比较有代表性的有:2009年4 月,同济大学等进行了海底观测组网技术的实验,并建立了我国第一套海底综合观测试验与示范系统—东海海底观测小衢山实验站[24].2011年4月,国内首个海底观测节点在美国蒙特里加速研究系统(Monterey accelerated research system,MARS)上成功进行为期6个月的深海并网试验[25].2012年,我国正式启动重大项目“海底观测网试验系统”[13].该项目计划在南海和东海分别建设海底观测网试验系统.南海海底观测网试验系统于2016年9月建设完成,该系统以海南为岸基站,观测平台布放在水深1800 m处,通过150 km 海底光电缆提供能源供给和通信传输链路.东海海底观测网以舟山为岸基站,布设33 km海底光电缆.2013年5月,中科院南海海洋研究所等在南海三亚海域建立首个“海底观测示范系统”[13].该系统主要由岸基站、海底光电缆、1个声学网关节点、3个观测节点、1个主接驳盒和1个次接驳盒、3套观测设备组成.该系统是功能相对较为完整的海底观测示范系统,在水下观测关键技术方面取得重大突破.2016 年底,中国科学院实现了潜标数据的实时传输[26].2017 年5月,中国正式批复建立国家海底科学观测网,该项目计划在东海和南海分别建立海底观测系统,从而实现东海和南海从海底向海面的全天候、实时、高分辨率的多界面立体综合观测[27].
我国应切实寻找适合我国国情的海洋观测网的建设经验和方法,综合分析和探讨我国建立海洋观测网的紧迫性和科学价值.
1.2 水下传感器网络的系统组成及其分类
广义的USNs主要包括集成不同功能的传感器节点、融合中心、自主水下航行器(Autonomous underwater vehicle,AUV)、水下滑翔机、海面基站以及海岸基站等多个部分[28−29],其基本结构如图2所示[30].本节将对USNs各个部分的基本功能及其主要分类进行概述.
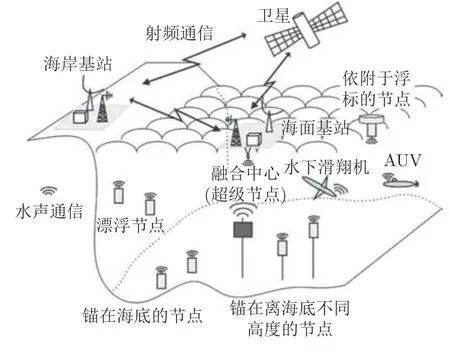
图2 USNs的系统组成Fig.2 System composition of USNs
传感器节点是USNs最基本的组成部分,主要通过直接锚定在海底、通过系链锚定在离海底不同的深度、搭载在AUV或水下滑翔机上、依附于海面浮标以及利用气囊控制浮力大小漂浮在海洋的不同深度五种方式布放到待监测水域.传感器节点具备一定的计算能力和水声通信功能,其基本架构如图3所示[30],包括传感器、中央处理器(Central processing unit,CPU)、水声调制解调器、存储器和电池[31].其中,传感器包括多个同质或异质传感器,根据不同的任务需求采用不同的传感器,主要负责实时监测、采集海洋环境信息,如温度、压力等,并将采集的信息通过接口电路传递给CPU.CPU将信息进行处理后,将其存储在存储器中或利用水声调制解调器通过水声信号发送给其他节点.电池负责给节点的各个模块提供能量.漂浮节点主要依靠洋流的作用进行扩散,是实现大规模USNs部署的有效途径.搭载于AUV或水下滑翔机的移动节点使USNs获得了移动性.其作用主要体现在五个方面:辅助其他传感器节点实现自定位[32−33];负责收集和搬运较大规模的数据,减小USNs对储能的依赖[34];根据任务需求从时间或空间上加强特定区域的监测能力;及时替代USNs中损坏的传感器节点,避免出现监测盲区;实现不可预知条件下短期、迅速、大范围、多层次的监测.融合中心主要承担传感器节点的管理调度、数据的收集与处理以及与海面基站的直接通信等任务,其硬件结构复杂,可通过与水面基站进行直接通信自主更新其位置,且储能更大,更容易回收.海面基站主要负责将收集的信息进行进一步处理后,通过射频通信传输给岸基中心.最后,岸基中心将采集的信息进行更全面的处理和分析,以进行下一步的决策和指挥.
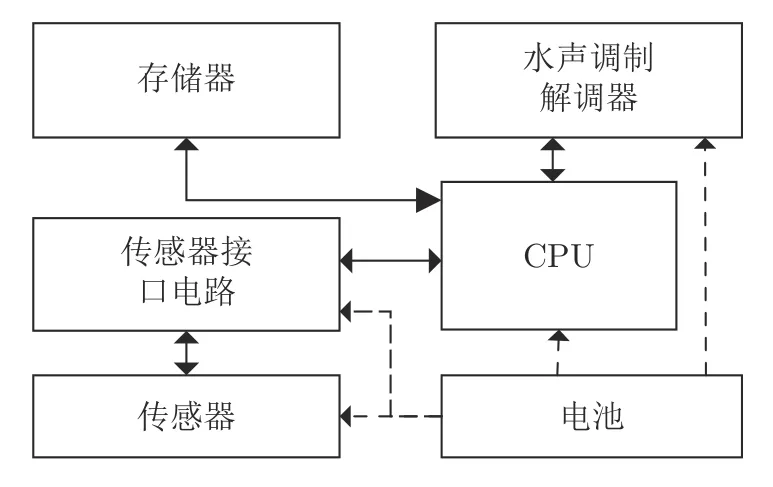
图3 传感器节点的基本架构Fig.3 Basic architecture of sensor node
USNs主要有三种分类标准[28−29].根据节点是否具有移动性,USNs可分为固定USNs、移动USNs以及混合USNs;根据网络覆盖方式,USNs可分为二维USNs和三维USNs;根据组网方式,USNs可分为有缆USNs、无缆USNs以及混合组网的USNs.
固定USNs主要用于特定小范围的监测任务,如港口、航道等,其传感器节点通过锚和缆绳进行固定.虽然在洋流的作用下,节点位置会出现一定的偏移,但该偏移相对较小,且可通过节点自定位算法实现节点位置的实时更新[35−36].移动USNs的传感器节点主要由漂浮节点和移动节点构成,节点具有一定的移动性,主要适用于大范围、多层次的海洋监测场景.混合USNs兼具固定USNs和移动USNs的优点,广义的USNs都是指混合USNs.二维USNs中的传感器节点一般都直接部署在海底或海面,网络结构简单,容易部署,但覆盖范围较小,功能单一.三维USNs中的传感器节点可部署在水中的任意深度,实现对监测区域多维度、多层次的三维立体监测,监测范围广,功能全面.但网络的建设、运行及维护成本高、难度大.有缆USNs主要安装在海底,利用光电复合缆(海底电缆)将各传感器节点与海岸基站连接起来,这种网络能够长期供应电力和快速传输数据,但耗费较大,适用于近岸海域.无缆USNs中的传感器节点之间依靠水声通信进行数据传输,节点通过电池进行供电,海面浮标依靠射频信号与海岸基站或卫星进行通信,比较经济,适合离岸较远的深海区域.现有的USNs基本都是混合组网的USNs,应该按照实际的应用需求,选择合适的网络结构.
2 水下目标跟踪系统模型
水下目标跟踪系统模型包括目标运动模型和观测模型.目标运动模型是根据目标的类型(潜艇、AUV等)、运动状态(匀速、匀加速等)以及已知的先验知识对目标的运动状态(位置、速度、加速度等)进行描述.观测模型主要取决于传感器的类型(压力、振速等)和观测量(距离、方位、频率等).在点目标的假设下,不同的传感器可获得不同的观测量,如主动声呐通常能获得目标的距离、方位、俯仰以及径向速度等信息,而被动声呐一般只能获得目标的方位、俯仰信息.目标跟踪系统模型的建立是研究水下目标跟踪技术的基础,建立一个准确、合适的目标跟踪系统模型对实现高精度的水下目标跟踪至关重要.常用涉及偏差的非线性运动方程和量测方程来表示水下目标跟踪系统模型:

其中xk、zk、wk和vk分别表示为k时刻的目标状态、观测信号、过程噪声和观测噪声.f(·)和h(·)分别表示非线性状态函数和观测函数.
由水下环境的随机性、复杂性、多样性以及水下目标的强机动性导致的目标运动模型的不符合可能造成跟踪性能的降低,甚至跟丢目标.在建立水下目标运动模型时,一般需要遵循的原则是所建立的模型既能全方位地描述水下目标的实际运动特性,又要便于数学处理,以保证目标跟踪的实时性.目标运动模型的建立经历了由简单到复杂的过程.根据描述运动状态时采用模型的数目,目标运动模型可分为单模型和多模型.单模型是指仅用一种模型来描述目标的运动状态.常用的单模型除了匀速运动(Constant velocity,CV)模型、匀加速运动(Constant acceleration,CA)模型以及匀速转弯运动(Coordinated turn,CT)模型以外[37],还有基于时间相关函数的时间相关模型(Singer模型)[38]、基于马尔科夫过程的半马尔科夫模型[39]、基于修正的瑞利—马尔科夫过程的“当前”统计(Current statistical,CS)模型[40]以及状态向量包括加速度导数的Jerk 模型[41]等.在实际系统中,目标的机动性不断提高,采用单模型往往不能准确地描述目标的运动状态.为解决目标模型的不确定性,多模型的思想被引入到目标跟踪中.目前应用最广泛的是Blom等在1988年提出的交互式多模型(Interacting multiple model,IMM)[42].IMM采用多个模型交互的方式进行估计,各模型之间的状态转移由马尔科夫概率转移矩阵确定.该模型适用于机动目标的跟踪,当采用较完备的模型集时,在理论上能达到对目标运动状态的最佳估计.
以上目标运动模型都是针对陆上的目标跟踪提出来的.虽然目前大多数文献都是直接将陆上的目标运动模型应用于水下目标.但是,由于水下环境的影响,水下目标与陆上目标的运动特性存在本质区别.因此,这些模型并不能很好地描述水下目标的运动状态,应该在充分探究水下目标运动特性的基础上,专门建立符合水下目标特点的运动模型.目前针对水下目标运动模型的研究成果还十分有限,党建武在文献[43]中提出一种机动目标自适应高斯模型.该模型能较好地描述水下机动目标的运动状态.基于IMM的思想,文献[44]针对水下机动目标提出一种基于IMM的五度容积卡尔曼滤波(Cubature Kalman filter,CKF)来改进目标跟踪和模型估计的精度.文献[45]提出一种将粒子滤波与IMM结合的水下目标跟踪算法.文献[46]引入支持向量机来估计目标运动模式,降低了目标机动时的跟踪误差.以上文献虽然实现了水下机动目标的跟踪,但是并没有充分考虑水下环境因素对目标运动状态的影响.因此,需要结合水下环境因素进一步研究适用于水下机动目标的运动模型.
海水是一种非均匀介质,声波信号在海洋中传播时其传播速度与路径会随海水温度、深度、盐度、压力等因素的变化而明显改变.因而在目标跟踪过程中,水声环境因素将会对获得的量测信息产生较大的影响,进而导致构建的量测模型产生较大的误差,造成目标跟踪精度降低[47].因此,在设计量测模型时,应充分考虑水声传播模型和水声环境噪声等对量测模型的影响.目前针对这方面的研究还相对较少.考虑到声信号传播路径变化的问题,文献[48]提出一种基于等梯度声速的量测模型,该模型将声速的变化通过与深度有关的声速曲线进行近似建模,但其需要已知目标的深度信息,适用于合作目标的跟踪,且量测模型较为复杂.为进一步克服声速变化对量测信息的影响,文献[49]提出一种引入修正参数的量测模型修正方法,解决了声速变化导致的量测模型偏差,提高了目标跟踪的准确性.但以上文献都没有考虑因节点受水流影响发生位置偏移导致的量测信息不准确,研究节点的移动性对量测模型的影响也是一个重要的研究方向.
综上所述,由于受水下环境噪声和水声传播方式的影响,且节点因洋流等因素的作用而具有一定的移动性,因此,传统的目标运动与量测建模方式不再适用.水下目标的跟踪性能高度依赖于对海洋环境的精确描述和水下目标运动、量测的准确建模,应通过分析水下目标特性,并融合水下环境来实现对水下目标运动模型和量测模型的准确构建,为高精度的水下目标跟踪提供可靠的保障.
3 基于USNs的水下单目标跟踪技术
水下目标跟踪是指利用不同种类的一个或多个传感器所获得的不同量测信息(距离、方位、频率等)通过滤波算法对目标的状态(速度、位置、加速度等)在时间上进行连续地估计与预测.由于水下环境的特殊性以及水下目标运动的复杂性,一般选择非线性滤波算法对目标状态进行估计.常用的非线性滤波算法主要包括扩展卡尔曼滤波(Extended Kalman filter,EKF)、无迹卡尔曼滤波(Unscented Kalman filter,UKF)以及粒子滤波(Particle Filter,PF).在进行水下目标跟踪时应根据实际构建的目标运动模型和量测模型选择合适的非线性滤波算法.
目前,国内外已经有很多研究机构及学者对基于USNs的单目标跟踪进行了深入研究.从滤波算法的角度来讲,基于USNs的目标跟踪和基于非USNs的目标跟踪不存在本质区别,都是利用非线性滤波算法实现水下目标跟踪.二者的不同点在于,USNs中包含大量的传感器节点,这些节点可以灵活地部署在待监测区域的任何位置.基于USNs的目标跟踪是一种分布式目标跟踪系统,可同时利用多个同质或异质传感器节点通过自组织的方式从多个角度采集有关目标的多维信息,然后通过将多个节点采集的量测信息进行融合,协同完成目标跟踪任务.因此,信息融合技术在实现基于USNs的目标跟踪中起着至关重要的作用.与此同时,网络中单个节点所拥有的能量资源、带宽资源、通信能力以及数据处理能力都受到一定的限制,且单个节点获得的目标信息也非常有限.因此,单个节点的跟踪精度非常有限.引入信息融合技术不仅可以综合利用多节点提供的信息,改善系统的跟踪性能,使系统更加稳健可靠,还可充分利用系统能量资源,延长USNs的使用期限.综上所述,本文选择从信息融合的角度出发,分同步式融合和异步式融合两个方面来综述水下单目标跟踪技术.
3.1 基于同步式融合的水下目标跟踪方法
同步式融合是多传感器信息融合中应用最为广泛的一种融合方法[50],目前大部分水下目标跟踪系统都是基于同步式融合实现的.如图4所示,同步式融合假设各个传感器节点同步对目标信息进行采样,而且数据同步到达融合中心.根据融合结构的不同,同步式融合又可分为集中式融合和分布式融合[51−52],下面将针对两种融合结构的实现原理及其在水下目标跟踪中的应用进行阐述.
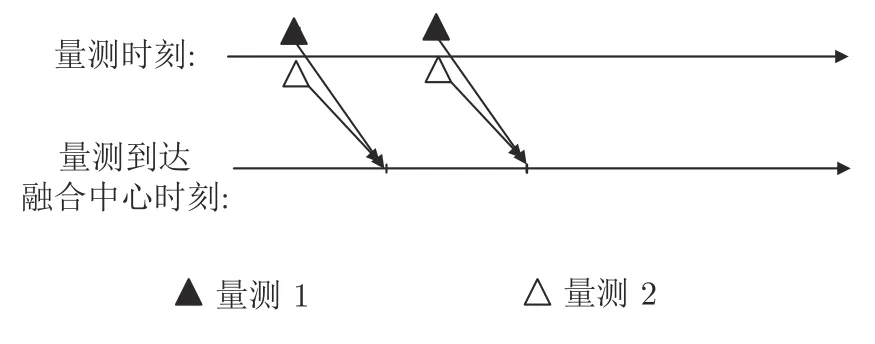
图4 同步量测Fig.4 Synchronous measurement
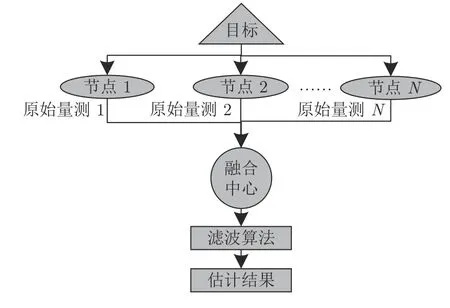
图5 集中式融合过程Fig.5 The centralized fusion process
如图5所示,在基于集中式融合的水下目标跟踪中,USNs中的每个传感器节点都把获得的原始量测信息完整地发送给融合中心,然后融合中心根据各个节点的原始量测信息利用融合算法获得目标的融合估计状态.这种融合结构可以尽可能完整地保留量测信息,基本不存在任何信息损失,跟踪精度较高.缺点是所有节点都需要将原始量测信息发送给融合中心,通信数据量较大,对通信链路的通信带宽以及实时传输能力要求比较高,而且能耗较大.此外,该结构要求融合中心具有较强的计算能力,处理过程过于依赖融合中心,因而鲁棒性较差.
考虑到USNs的通信资源、能量资源以及计算资源都比较有限,采用集中式融合结构实现水下目标跟踪具有一定的局限性,相关的研究成果相对较少.文献[49]提出一种基于量测模型修正的集中式目标跟踪算法.节点直接将采集的量测数据发送给融合中心,然后融合中心根据量测数据、上一时刻的目标状态估计以及修正参数完成量测模型的修正和目标状态的融合估计.文献[53]提出一种基于IMM和自适应卡尔曼滤波(Adaptive Kalman filtering,AKF)的集中式融合算法.该方法将自适应遗忘因子引入最优的集中式融合KF算法,并结合传统IMM算法的优势,实现对水下目标的跟踪.针对集中式融合结构存在的不足,近些年研究者们已经提出了多种优化措施,在保证跟踪精度的前提下,在最大程度上减小整个网络的通信数据量和能量消耗,例如,引入节点选择策略、对原始量测进行量化、选择最优拓扑结构等.
为克服集中式融合目标跟踪方法存在的缺陷,分布式融合目标跟踪方法继而被提出.如图6所示,在基于分布式融合结构的水下目标跟踪中,USNs中的每个传感器节点根据获得的量测信息经局部滤波后得到目标状态的本地估计,各个节点只需要将本地估计结果上传至融合中心,融合中心再利用融合算法得到目标状态的融合估计.此外,按照融合估计是否反馈给本地节点,分布式融合方法还可分为不带反馈的分布式融合方法和带反馈的分布式融合方法.其中,引入反馈机制可以减小本地估计误差的协方差矩阵,提高跟踪精度.与基于集中式融合的目标跟踪相比,基于分布式融合的目标跟踪具有较小的通信和计算负担,更高的容错能力,不会因为某个节点的量测存在错误而影响融合结果.
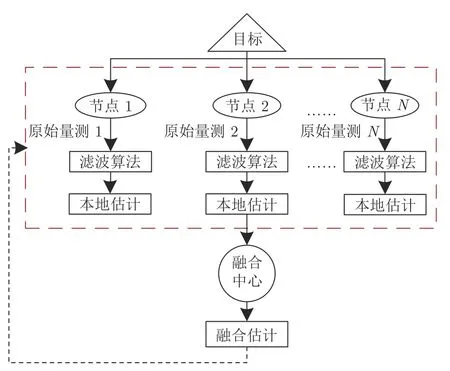
图6 分布式融合过程Fig.6 The distributed fusion process
目前针对基于分布式融合的水下目标跟踪已有大量研究,并且取得了一些优秀的研究成果.文献[54]提出一种分布式的节点调度策略以实现高效节能的水下目标跟踪.它将每个节点都建模为概率有限状态自动机,以控制每个节点的能耗、感知以及通信.文献[55]提出两种分布式信息融合方案以实现各节点之间的信息共享,进而提高系统的检测/跟踪性能.文献[56]采用分布式的IMM滤波实现水下机动目标的跟踪.文献[57]提出一种基于IMM的分布式目标跟踪算法来实现对水下机动目标的精确跟踪.算法采用分布式的节点调度方案,根据目标的估计信息实时调整节点的唤醒/睡眠状态,在保证可靠跟踪的同时,有效降低系统的能耗.文献[58]提出一种带反馈的水下分布式融合算法,利用多节点获得的纯方位信息进行目标状态融合估计,并通过反馈机制改善局部节点的估计精度.按照系统工作模式,水下目标跟踪系统可分为主动跟踪系统和被动跟踪系统,在被动跟踪系统中,节点探测范围更广,且不需要主动发射信号,安全系数更高.文献[59]在被动跟踪过程中引入一种分布式融合算法,采用分量按标量加权的线性最小方差融合准则来极小化融合误差协方差的迹,求得最优融合状态估计,该算法可以保证目标跟踪精度的收敛性.虽然基于分布式融合的目标跟踪已经有了很多优秀的研究成果,但仍存在一些可以继续改进的地方,应该充分利用USNs的自组织能力,实现研究精度更高、系统更灵活的分布式跟踪方案.
由以上分析可知,分布式融合结构更适合基于USNs的目标跟踪.此外,只有对航速较慢的水下目标(如潜艇、AUV 等)进行跟踪时,水声传播时延对目标跟踪精度的影响才可忽略不计.当目标的航速较快(40节以上)时,通信时延导致的跟踪误差将不可忽视[60].因此,基于同步式融合的水下目标跟踪方法主要适用于速度较慢的水下目标.
3.2 基于异步式融合的水下目标跟踪方法
同步式融合在实现过程中假设声波信号在传输时能够始终保持同步,这是一种非常理想的环境.在实际的水声环境中,节点很难获得对目标同一时刻的同步测量,各节点之间存在明显的异步现象.导致异步现象的原因主要包括三个方面:首先,由于水声信号在海水中的传播速度非常慢(大约1500 m/s),且会随着海水温度、盐度、压力以及深度等环境因素的改变而明显变化,加上USNs中的传感器节点具有分布范围广且结构稀疏的特性,因此,节点和目标之间、节点和融合中心之间普遍存在较大的信号传播时延,而且不同节点到目标与融合中心的时延存在较大的差异,使得不同节点很难获得来自同一目标的同一时刻的同步量测,即使能够获得同步量测,到达融合中心的量测也很难同步;其次,各传感器节点特别是异质传感器节点的采样频率可能存在差异,而且各个传感器节点的数据处理时间以及通信滞后都不尽相同,导致实际传感器数据不可能同步;最后,即使各传感器节点具有相同的采样频率,如果容许多个传感器节点同时向融合中心发送声波信号,也会产生严重的信号干扰现象,导致融合中心接收的信息不准确,为有效避免这个问题,通常引入传感器节点的调度策略,以实现传感器节点间的异步测量.如果直接利用这些异步测量值进行融合,会导致较高的跟踪误差.因此,研究异步融合算法对于水下目标跟踪而言具有非常重要的意义.
根据获得量测信息的类型,异步式融合又可分为基于顺序量测(In-sequence measurement,ISM)的异步融合和基于非顺序量测(Out-of-sequence measurement,OOSM)的异步融合.其中,如果融合中心接收量测信息的顺序与目标发射声波信号的顺序在时间上保持一致,这种融合方式称为ISM异步融合,如果不相同,则称之为OOSM异步融合.异步量测的几种情况如图7所示[61].
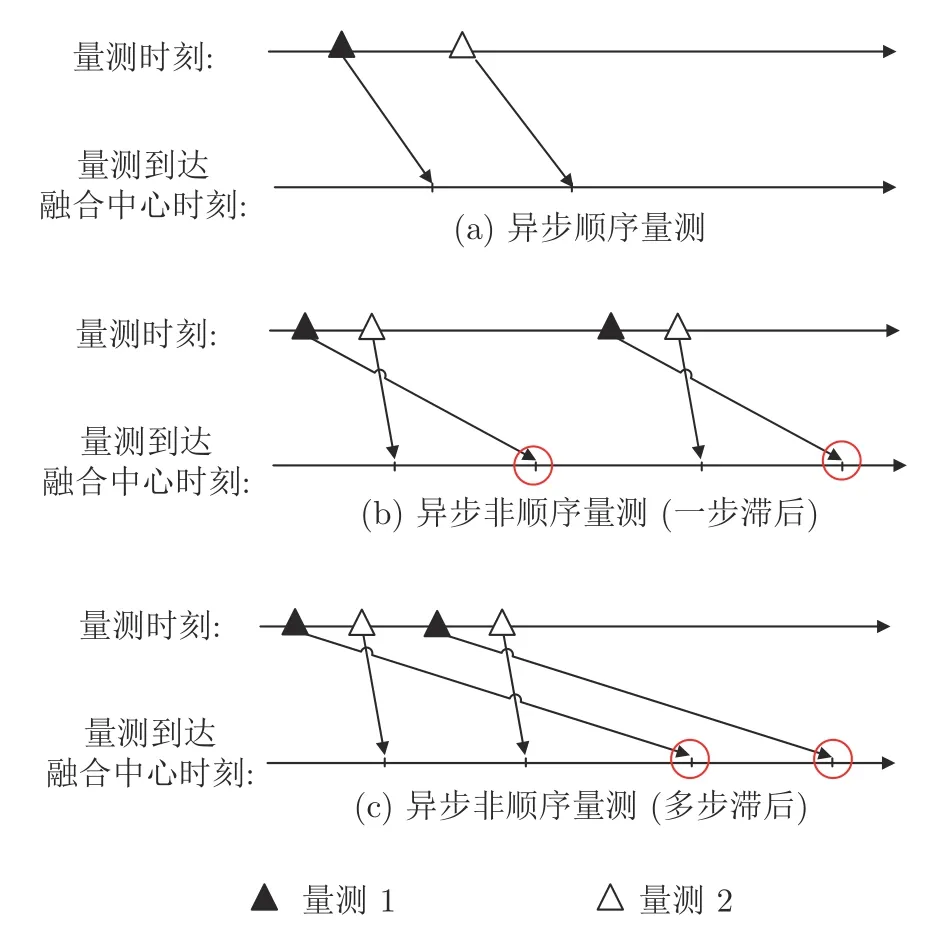
图7 异步量测Fig.7 Asynchronous measurement
虽然目前有些文献提出了基于USNs的异步融合定位算法[62−63],但是基于USNs的异步融合跟踪的相关文献还非常少.通常可直接采用序贯滤波来解决ISM异步融合问题.针对由于各传感器节点的采样频率差距大而导致每个节点对同一目标获得的量测信息不同步的问题,主要采用时间配准策略将其同步到同一采样时刻来解决.目前应用比较广泛的时间配准方法主要包括:最小二乘配准、内插外推法、最小二乘虚拟法等,这些时间配准策略分别适用于不同场景.文献[61]在主动场景下设计了基于时间配准的异步融合算法和基于状态预测的异步融合算法,并对两种算法的优缺点进行了比较.文献[64]针对USNs中基于异步量测的目标跟踪算法从预测估计、固定平滑等多个角度进行了深入研究.文献[60]在被动工作模式下提出了一种基于时延估计的异步PF算法来克服异步数据无法融合的问题.文献[65]通过构造时间延迟与位置的关系设计了一种异步定位算法来估计目标位置,并在此基础上实现对目标的持续跟踪.在大多数场景下异步融合算法的跟踪性能优于伪同步算法[49,53−59].
OOSM异步融合中节点获得量测信息的顺序与目标发送的顺序在时间上存在差异,因此,其相对ISM异步融合要复杂很多.如图7 所示,根据所获得量测信息的滞后步数,OOSM异步融合可划分为一步滞后OOSM异步融合和多步滞后OOSM异步融合.目前针对该问题的研究成果非常少,且主要集中在一步滞后OOSM异步融合,主要采用负时间量测更新的思想进行解决.文献[66]提出一种基于无迹粒子滤波(Unscented PF,UPF)的OOSM处理方法,并将其应用于基于USNs的水下目标被动跟踪.
目前,异步融合问题已经成为研究水下目标跟踪技术及其工程实现过程中一个极具挑战性且不可回避的问题.此外,由于复杂的海洋环境中存在各种反射体和折射体,导致多径效应明显,这使基于USNs的异步融合问题变得更为棘手.目前针对基于异步式融合的水下目标跟踪技术的研究还比较少,有很多问题尚未得到有效解决,需要继续进行更深入的研究.
4 基于USNs的水下多目标跟踪技术
由于在实际的水下环境中可能同时存在多个目标,多目标跟踪问题相对比较复杂,水下单目标跟踪技术将不再适用.因此,必须研究水下多目标跟踪技术以实现对水下多目标的精确跟踪.由于水下环境噪声与混响的存在,水下多目标跟踪需要处理诸多不确定性,包括目标的不确定性、量测数据的不确定性以及量测—目标关联的不确定性.如图8所示[61],给定目标在k−1 时刻的状态xk−1,目标的不确定性是指每个目标在k时刻的状态可能转移到新的状态xk或消失,还可能出现新的目标集合Bk或由前一时刻的目标催生新的目标集合Γk,目标的数目是不断变化的,很难准确确定目标的个数.如图9所示[61],量测数据不确定性是指由于设备误差和复杂水声环境等因素的影响导致给定目标xk或被检测到获得量测zk,或未被检测到导致量测空间为空集,此外,节点还可能会收到杂波或虚警构成的量测集Ωk.量测—目标关联的不确定性是指当复杂的水声环境中同时存在多个目标时,很难准确判断每个采样时刻的每个量测信息的准确目标来源或是否由杂波产生.
在复杂水下环境中如何根据传感器节点获得的量测数据准确判断目标的个数以及每个目标的状态是水下多目标跟踪技术面临的巨大挑战.水下多目标跟踪技术的研究一直是水下目标跟踪领域的重点和难点,受到各界学者的广泛重视和深入研究,并取得了长足的进步.目前多目标跟踪技术主要可分为两大类:基于数据关联的多目标跟踪和基于随机有限集的多目标跟踪.本节针对两种方法在水下多目标跟踪中的应用进行阐述.
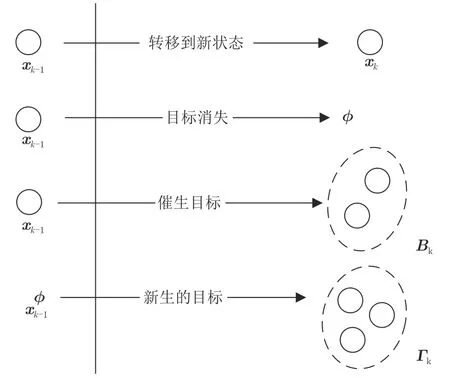
图8 多目标运动模型Fig.8 Multi-target motion model
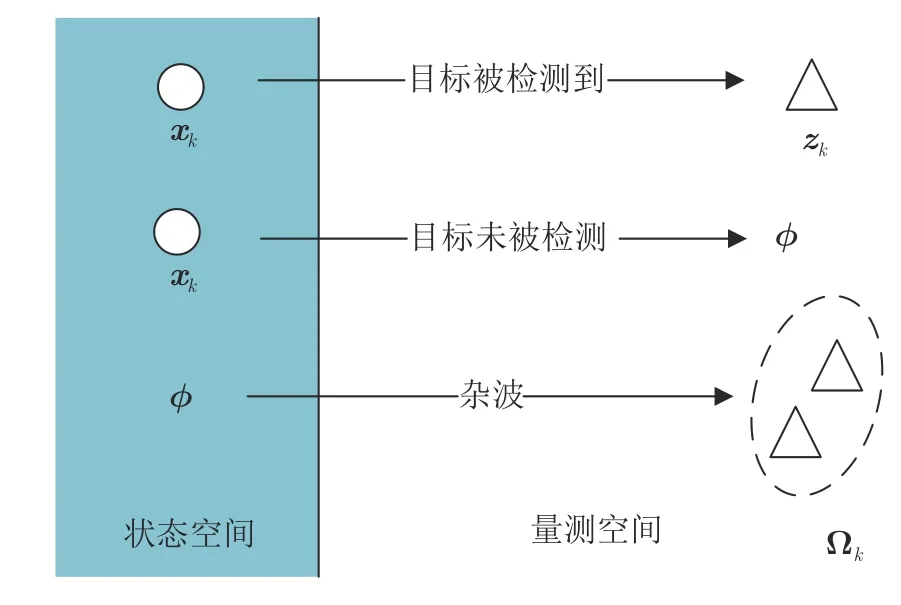
图9 多目标量测模型Fig.9 Multi-target measurement model
4.1 基于数据关联的水下多目标跟踪方法
基于数据关联的水下多目标跟踪方法的应用条件为目标个数已知或不随时间变化.其首先引入数据关联算法以确定目标和量测信息两者之间的关联关系,然后通过引入贝叶斯方法将复杂的多目标跟踪问题转换为较简单的单目标跟踪问题,即将整个跟踪过程分为“关联”和“滤波”两大步.其基本原理如图10所示,主要包括门限检测、数据关联、跟踪起始、跟踪维持、跟踪终结、跟踪滤波和预测等步骤.其关键和核心是数据关联,关联的正确与否直接影响到估计结果的准确性.
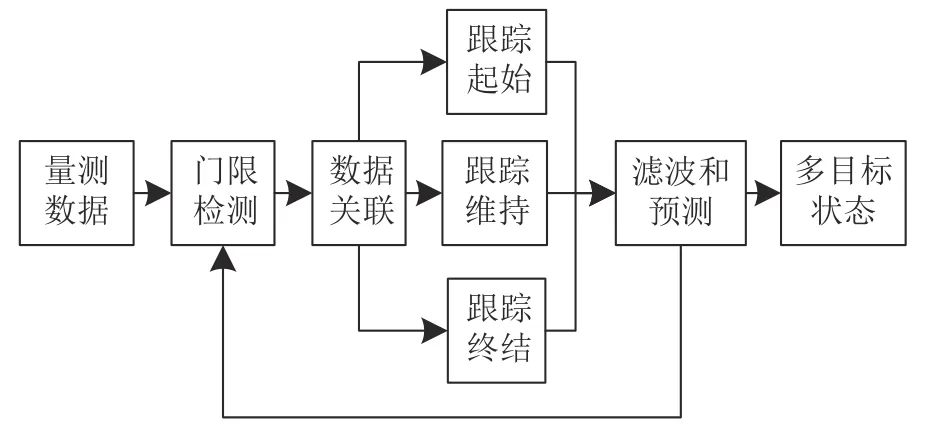
图10 基于数据关联的多目标跟踪Fig.10 Multi-target tracking based on data association
数据关联是处理不确定性问题的关键方法.目前比较经典的数据关联算法主要有最近邻(Nearest neighbor,NN)算法、全局最近邻(Global NN,GNN)算法、概率数据关联(Probabilistic data association,PDA)算法、联合概率数据关联(Joint PDA,JPDA)算法、多假设跟踪(Multiple hypothesis tracking,MHT)算法以及概率多假设跟踪(Probabilistic MHT,PMHT)算法等.表1对各种数据关联算法的优缺点及应用范围进行了比较.
目前关于水下多目标跟踪的相关文献还相对较少,其中大多都是基于数据关联的方法实现的.文献[67]将CKF集成到PDA中,提出一种基于CKFPDA的纯角度水下多目标跟踪算法,利用PDA来完成目标—量测的关联任务.当目标之间距离较近、目标航向相同或交叉时,若采集与目标相关的特征信息(如声波的振幅、多普勒频率等),并将其结合到数据关联中,可大大改善数据关联的性能和目标跟踪的精度.文献[68]提出一种基于船舶辐射噪声进行数据关联的方法.该方法利用船舶辐射噪声谱特征来辅助PDA算法,从而改进了近距离时数据关联和水下目标跟踪的性能.文献[69]将速度分量引入量测信息,提出一种多普勒数据关联(Doppler data association,DDA)算法,并将其扩展到线性多目标集成概率数据关联(Integrated PDA,IPDA)技术中,且在海洋环境中验证了该方法的优越性.针对密集多杂波多目标跟踪情形,文献[70]设计了一种适用于水下的多目标跟踪算法.算法采用分布式多假设融合结构,在每个节点上都执行MHT算法以获得局部状态估计,然后全局跟踪器通过执行MHT算法获得目标的融合估计结果.文献[71]提出一种适用于高杂波环境的基于PMHT的纯方位水下多传感器多目标跟踪方法.它将PMHT分别与EKF算法和UKF算法相结合提出PMHTe和PMHTu算法,并与GNN算法进行了比较,证明这两种算法在强干扰环境下均能表现出良好性能.文献[72]进一步研究了当目标—量测关联和发射站—量测数据关联均未知时的改进PMHTe 和PMHTu算法,取得了良好的跟踪性能.为克服传统PMHT存在的缺点,文献[73]提出一种确定性退火Homothetic PMHT(Deterministic annealing homothetic PMHT,DA-HPMHT)算法,以实现在密集杂波环境下基于纯角度的水下多目标跟踪,该方法可以使目标的后验概率估计收敛至全局最大值,且引入的确定性退火方法减少了对目标初始化的依赖性.虽然以上成果都是基于单节点或声呐系统实现的,但其相关的理论成果可以扩展延伸至基于USNs的多目标跟踪问题.
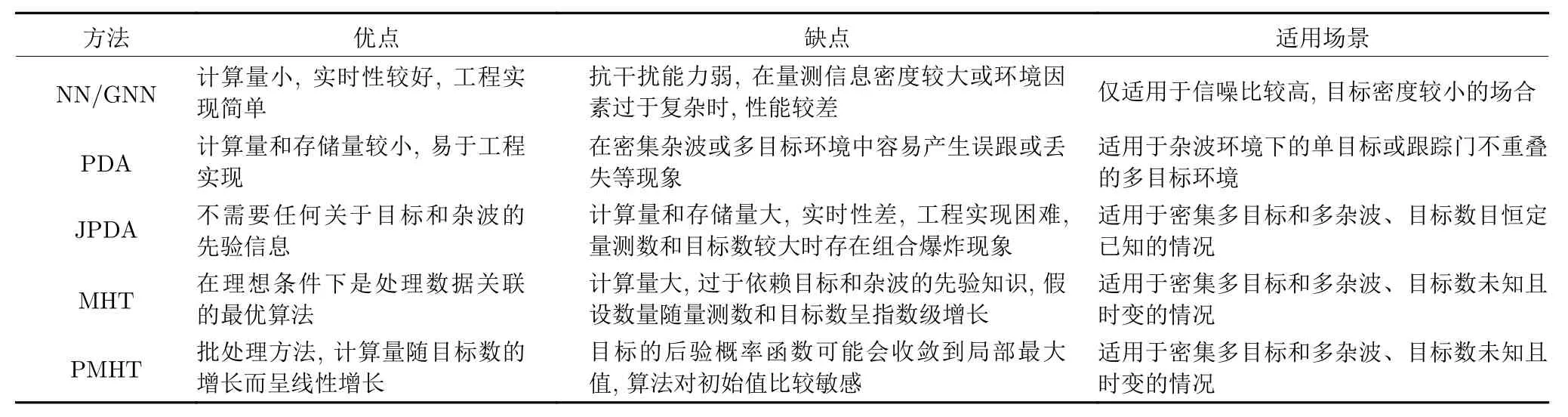
表1 各种数据关联算法的比较Table 1 Comparison of various data association algorithms
基于数据关联的多目标跟踪的核心是数据关联,其不足是需要预先知道目标的数目,且当目标数目较多时,复杂度较高,这限制了该技术的发展.此外,在复杂的水下环境中,该算法还面临环境适应性较差、鲁棒性较低、漏跟、误跟等问题.因此,提出跟踪性能更好、估计精度更高的水下多目标跟踪算法具有重要的应用价值和战略意义.
4.2 基于随机集的水下多目标跟踪方法
基于数据关联的多目标跟踪方法难以突破计算量大的瓶颈.随着多目标跟踪技术的快速发展,学者们提出利用随机有限集(Rand om finite set,RFS)实现多目标跟踪,该方法一经提出便引起国内外各界的广泛关注和深入研究.如图11所示[61],该方法巧妙地将多目标的状态空间和量测空间都建模成RFS的形式,将多目标滤波转化为集值滤波的问题.因此,多目标跟踪过程中目标的出现、消失以及量测中含有的漏检、虚警等均可表示成RFS的形式[74].这种方法使多目标跟踪能够在集合的意义上进行,不需要进行复杂的数据关联,可大大减小系统的计算复杂度,在目标数未知或可变时仍能对多目标进行精确跟踪,且可较好地完成跟踪的起始、终结和维持,比较适用于关联困难的高杂波环境下的密集多目标跟踪问题.
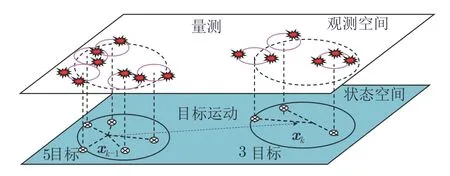
图11 基于RFS的多目标跟踪系统模型Fig.11 Multi-target tracking system model via RFS
1975年,Matheron首次提出了RFS的概念,RFS可较好地描述复杂环境下目标数目和状态时变条件下的多目标跟踪问题.1997 年,Mahler首先利用贝叶斯滤波器推导了基于RFS的多目标跟踪算法.2003年,Mahler在文献[75]中设计了概率假设密度(Probability hypothesis density,PHD)滤波器.随后Vo 等结合序贯蒙特卡洛(Sequential Monte Carlo,SMC)方法和高斯混合(Gaussian mixture,GM)方法给出了PHD滤波器的两种收敛实现.在此基础上,2007 年,Mahler提出一种带有势分布的概率密度假设(Cardinalized PHD,CPHD)滤波器[76].之后Vo 给出了CPHD滤波器的GM实现和SMC实现,CPHD对目标数目和状态的估计更精确,但其计算量也有所增加.自此,基于RFS的多目标跟踪吸引了大量学者的研究和探索,基于RFS的多目标跟踪理论体系逐渐走向完善,使该领域从理论研究过渡到工程实践成为可能.
以上算法都是针对陆上多目标跟踪问题设计的.由于海洋环境的复杂多变,声波在海水中传输时会受到大量的反射、折射和散射,属于高密度杂波环境.基于RFS实现水下多目标跟踪极具挑战性,目前相关文献还非常少.文献[77]提出将PHD的SMC实现应用于多个AUV 的跟踪问题.文献[78]研究了利用单个节点跟踪多个AUV的问题,提出使用向前—向后PHD平滑器来减轻高密度杂波水下环境对跟踪性能的影响,其性能优于GM-PHD滤波器.传统的PHD和CPHD都假定检测概率为先验已知,该假设在很多场合并不适用.虽然目前已经提出一些方法来估计检测概率,但大多数方法都假设它在检测区域和检测时间内是恒定不变的.针对这个问题,文献[79]提出一种适用于主动声呐跟踪系统的多目标跟踪方法.该方法基于主动声呐方程和信号检测理论在虚警概率一定的条件下对检测概率与跟踪距离的关系进行建模,得到自适应检测概率,并将其应用于GM-PHD滤波算法和GMCPHD滤波算法.以上成果都是针对单个节点或声呐系统实现的,并没有考虑真正USNs中的多目标跟踪问题.文献[61]提出了基于GM-PHD的多传感器OOSM融合算法.该算法分别推导了先验目标和后验目标两种目标类型在PHD框架下的负时间量测更新算法,能有效处理ISM和OOSM两种异步量测数据,对最新时刻多目标状态进行准确估计.虽然此文献将RFS应用到基于USNs的水下多目标跟踪中,但相关理论体系还不够完善[80],需要进一步深入研究探索.
综上,目前针对基于USNs的水下多目标跟踪的研究成果还非常少.但是,从海洋环境的发展趋势来看,未来海洋中的目标将多以群体的形式出现,而且目标的机动性将会增强,目标的隐蔽性也会提高.同时,复杂的海洋环境和多变的水声信道可能产生大量杂波,量测中可能含有虚警、噪声等多种不确定性.这些给水下多目标跟踪的研究带来了极大的挑战.因此,研究基于USNs的水下多目标跟踪技术已经成为水下跟踪领域发展的大势所趋.
5 水下目标跟踪中的能效优化措施
在正常情况下,USNs中的传感器节点均采用电池提供能量,特殊的水下环境致使更换储能已经耗尽的电池或对其进行二次充电是非常困难的,甚至是不现实的.而USNs的寿命往往依赖于网络中传感器节点的使用寿命,即在很大程度上是由节点的能量消耗速度决定的.此外,与WSNs发送无线电波所消耗的能量相比,水下节点需要更多的能量来发送声波信号.因此,如何延长USNs的使用寿命,有效解决有限的能量资源与节点发送声波信息能耗高之间的矛盾是基于USNs的目标跟踪面临的重要挑战之一[81].现有的能效优化措施主要从节点调度、量化理论和拓扑控制三个方面展开研究,下面对这三种能效优化措施在水下目标跟踪中的应用进行详述.
5.1 基于节点调度的水下目标跟踪方法
在目标跟踪过程中,USNs中的节点通过连续探测,实时采集有关目标的量测信息,然后节点直接将量测信息发送到融合中心或在局部完成滤波后将本地估计发送到融合中心,最后,融合中心利用融合算法融合所有节点提供的目标信息得到目标的状态估计.在通常情况下,参与目标跟踪的节点数越多,节点的采样周期越短,节点能够采集到的目标的量测信息就会越多,进而目标的跟踪精度也会越高.然而参与目标跟踪的节点数过多或节点发送量测信息次数过于频繁都会导致USNs消耗大量的能量.因此跟踪精度高与跟踪系统能耗低是一对矛盾的目标.如何有效地解决这一矛盾是研究水下目标跟踪技术的一个重要课题.节点调度就是根据特定的准则分别从空间和时间两个角度引入传感器节点管理技术,在目标跟踪精度满足特定需求的情况下,在最大程度上降低整个系统的能耗,实现目标跟踪精度与能耗之间的有效权衡.
从空间角度设计的基于节点调度的目标跟踪方法就是按照特定的准则构造目标函数,每次只选择满足特定要求和数量的节点参与目标跟踪过程,从而在高精度跟踪的同时达到降低网络能耗的目的.文献[82]提出一种节点唤醒/睡眠机制来实时调整USNs中各节点的工作状态.在每个工作周期,只有能获得目标信息的节点能够被融合中心唤醒,其他节点将继续处于睡眠状态,该工作模式在一定程度上降低了每个节点的能量消耗,被广泛应用于后续的研究工作.但是每一时刻所有能探测到目标的节点都参与目标跟踪也会造成极大的能量浪费.文献[83]基于不同的量测信息选择方法设计了两种基于簇的水下目标跟踪算法.一种方法选择量测值超过特定阈值的节点参与目标跟踪,该方法跟踪精度较高,但能耗也较高;方法二每次仅选择一个离目标最近的节点参与目标跟踪,该方法虽能耗较低,但会造成跟踪算法发散,不能长期为系统提供可靠的跟踪精度.此外,该文献没有提供选择两种工作模式的标准.文献[84]提出一种分布式智能节点调度方案,它将每个节点建模为概率有限状态机,并通过该模型控制节点的状态转换(睡眠、监听、低功耗感知、高功耗感知和数据传输),进而在保证跟踪精度的同时降低系统能耗.鉴于USNs节点的移动性和有限的存储能力,基于全局信息的节点选择算法并不适用.因此,文献[85]提出一种利用局部信息选择节点的带反馈的分布式跟踪方法,该方法只根据节点自身的位置信息即可判定该节点是否需要被唤醒参与目标跟踪,非常适用于USNs.针对被动模式下的节点选择问题,文献[59]提出一种基于动态簇的水下多传感器协作被动跟踪方法,动态选择参与目标被动跟踪过程的簇头和簇成员节点以实现跟踪精度和系统能耗的有效权衡.以上文献都是从空间角度出发,通过减少参与目标跟踪的节点个数来降低网络能耗,在通信能耗和跟踪效果之间取得动态平衡.
从时间角度,基于节点调度的目标跟踪方法是通过调节每个节点发送量测信息的次数来实现高能效的目标跟踪.文献[86]设计了一种自适应采样间隔调整方法,采用双输入—单输出的模糊逻辑控制器,在满足不确定性阈值的前提下使采样频率最小化,从而降低系统的能耗.文献[87]提出了基于节点选择和变采样间隔的USNs高能效目标跟踪算法,该算法不仅从空间角度选择最优节点组合,而且从时间角度根据跟踪精度的特定需求自适应地、实时地调整采样间隔,将目标跟踪误差控制在特定的范围.文献[65]提出一种基于一致性的贝叶斯滤波器实现水下目标跟踪,并纳入占空比机制来延长网络寿命.由于不同节点提供的量测信息对目标状态估计的价值不同.为进一步降低网络能耗,文献[88]提出一种基于虚拟量测的高能效目标跟踪方法,该方法采用自适应量测价值评估方法决定是否上传本地估计至融合中心,并产生虚拟量测以弥补因量测个数不足而导致的跟踪精度下降.以上文献是从时间角度出发,通过调整量测信息的采样频率或发送频率以降低网络能耗,实现高能效、高精度的水下目标跟踪.
综上所述,节点调度已经发展成为一种相对较为成熟的能效优化措施,目前已经从时间和空间两个角度实现了高能效的水下目标跟踪,有效解决了跟踪精度高和系统能耗低之间的矛盾.
5.2 基于量化理论的水下目标跟踪方法
虽然节点获得的原始测量信息能够提供更多目标的有效信息,实现更高的跟踪精度.然而,考虑到USNs中节点的能量资源极其有限,水声信道的通信带宽大约只有几十Kb/s.若节点之间传输的数据量过大不仅会消耗过多的能量,还会占用过多的通信带宽.因此,基于原始量测信息的水下目标跟踪方法并不适用于USNs.基于量化理论的水下目标跟踪方法通过对原始量测进行量化处理,将数据位数较多的原始量测压缩成只占几位的量化量测.该方法可以有效减少节点之间的通信数据量,减轻网络的通信负担和能量负担,避免网络发生堵塞,保证跟踪的实时性.但是,对原始量测进行量化会导致一部分有用的目标信息丢失,造成目标跟踪误差增大,尤其是当采用较低位数对原始量测进行量化或采用的量化方法不合适时,极易导致较差的跟踪效果.然而低能耗、低带宽的低位数量化量测又符合USNs目标跟踪对低能耗和低带宽的需求.因此,在保证跟踪精度的前提下,研究最优量化方法对于提升USNs目标跟踪在能耗和通信资源方面的高效性都具有非常重要的意义.
目前已有大量针对WSNs设计的最优量化方法.但适用于能量有限的USNs的量化方法还比较少.文献[89]研究了在量化量测条件下节点拓扑结构对目标跟踪性能的影响,但是该文献采用的是固定量化级数的量化方式.针对大多数的量化方法都具有计算复杂度较高的问题,文献[90]提出一种适用于USNs的计算简便、易于更新的基于最优量化界的水下目标跟踪算法.该算法通过最小化因量化量测而导致的额外误差协方差的期望来获得最优量化因子,进而由最优量化因子和目标实时状态得到节点的最优量化方案.其计算过程不依赖于目标的实时状态,在离线条件下即可解决复杂的优化问题,降低了算法的实时计算量.在密集网络中,每个采样时刻的候选节点非常多,即使每个节点都只发送量化量测给融合中心,其通信数据量依然很大.针对这个问题,文献[91]设计了一种最佳的比特分配方案,限制每个时刻的比特带宽,并在特定的比特带宽下最大化跟踪精度.由于不同节点从不同角度可以获得不同价值的量测信息,为充分利用高价值量测信息,文献[92]提出一种基于互信息的USNs目标跟踪方法.其根据量化量测与目标状态间的互信息对节点获得的量测信息进行有效评估以分配不同的融合权重,不仅能提高量测价值的利用率,而且能有效弥补因降低系统能耗而量化量测导致的跟踪精度下降.文献[93]提出一种基于长时能量分配的USNs目标跟踪方法.该方法根据节点量测信息能够提供价值的大小来决定各节点量化量测的位数以及需要分配能量的多少,进而提高整个系统的能源利用效率和跟踪精度.但该方法采用统一的量化阈值集合对量测进行量化,导致量测的信息损失较大,为保证跟踪精度,应对量化阈值的计算进行更深入的研究.
由以上分析可知,研究适用于USNs的量化方法以进行能效优化对USNs的发展具有极大的推动作用.在后续的研究工作中,应该继续致力于研究量化位数更少、跟踪性能更优的量化方法.
5.3 基于拓扑控制的水下目标跟踪方法
节点的拓扑结构是指USNs中各节点的位置关系和连接方式,节点的拓扑结构不仅会影响水下目标跟踪的精度,而且会在一定程度上影响跟踪系统的能耗[94].目前,基于拓扑控制的水下高能效目标跟踪也成为USNs领域的重要研究方向之一.现有的研究成果主要从两个角度来实现:1)基于最小化能量消耗的拓扑控制,主要通过设置特定的优化目标函数来评估跟踪过程中节点的能量消耗来选择具有特定拓扑结构的节点组合;2)基于节点剩余能量的拓扑控制,主要根据节点的剩余能量来完成网络拓扑结构的选择,避免剩余能量过低的节点连续参与目标跟踪过程,尽量平衡USNs内所有节点的能耗,避免产生网络空洞,进而达到延长USNs使用期限的目的.
目前基于USNs的目标跟踪在此方面的研究还比较少,相关理论技术尚不成熟.随着USNs的发展,基于拓扑控制的水下目标跟踪方法将成为重要的研究方向之一.考虑到USNs的能量比较有限,文献[95]利用最小化能量消耗选择最优融合中心,并通过最小化后验克拉美罗下界选择最优拓扑结构.但该文献使用的是原始量测,为进一步降低系统能耗,文献[89]进一步推导了量化量测条件下最优融合中心和最优拓扑结构的选择.为解决由节点稀疏导致的量测信息不足的问题,文献[96]设计了一种考虑能耗的深度调节方案,通过能耗控制节点深度的动态调节,实现节点位置的自组织调整.该方案在实现高精度跟踪的同时,减小了节点的能量消耗.由于USNs中每个节点的能量非常有限,为了避免由于对网络中的某个节点过度使用而造成网络空洞,在目标跟踪的过程中,要对节点的剩余能量进行评价,尽量选择剩余能量较多的节点参与目标跟踪.文献[97]设计了一种节点剩余能量动态感知方法,根据感知到的节点剩余能量,自动调整节点发送声波信号的功率,构建合适的拓扑结构以降低剩余能量较少的节点的使用次数,避免形成网络空洞,从整体上延长网络的使用期限.然而,该方法构建的是一种全局的拓扑结构,采用集中式的控制方式.针对这个缺陷,文献[98]针对异构多跳传感器网络提出一种剩余能量感知动态拓扑控制算法,该算法综合考虑接收器的灵敏度、发送器的最大传输功率以及节点的剩余能量来控制拓扑结构.为平衡能量消耗,文献[86]设计了单输入—单输出模糊逻辑控制器来根据各节点的剩余能量实现不确定性阈值的自动调整,有效避免个别节点能量过低而无法继续工作.由以上分析可知,目前基于拓扑控制的水下目标跟踪方法主要通过控制网络能耗和节点剩余能量两种方式来实现节能的目标.研究如何给出新的综合优化指标,并在此基础上设计新的拓扑控制策略是进一步研究的方向.
综上所述,为解决基于USNs的目标跟踪面临的能效优化问题,目前的研究成果主要从节点调度、量化理论以及拓扑控制几个角度来实现,已经形成了一套相对完整的理论体系,在一定程度上克服了基于USNs目标跟踪中资源有限的弊端,为实现基于USNs的目标跟踪提供了理论支撑.在现有研究的基础上,以后应该继续致力于研究性能更优、计算量更小、实时性更好的能效优化措施以实现USNs的高能效目标跟踪.此外,也有一些从其他角度出发或研究相对分散的能效优化措施,例如,设计低功耗的芯片[99]、节点部署策略[100]、低功耗的路由协议[101]以及网络协议[102]等,但是本文侧重综述跟踪算法中的高能效措施,因此与之相关的研究成果本文不再进行详述.
6 挑战与展望
基于上文对研究现状的介绍,目前基于USNs的水下目标跟踪面临的挑战及其未来的发展方向主要体现在以下几个方面:
1)目前大多的水下目标跟踪算法都是基于理想水声环境实现的,没有考虑复杂水声通信环境对跟踪性能的影响.由于水声信道在时间和空间上的复杂性和多变性,而且声波在海洋中的传播速度会随着海水温度、盐度、深度以及压力等环境因素的变化而改变,水下目标跟踪普遍存在通信带宽受限、传播时延较长、杂波较多、时变多径效应严重以及误码率高等问题,这些因素都会严重影响目标跟踪的性能.因此,研究如何对水声信道进行合理建模,并在此基础上设计合适的水下目标跟踪算法以克服水声通信缺陷对目标跟踪的影响势在必行.
2)目前大多数水下目标跟踪算法都是基于固定USNs实现的,而在实际环境中,节点由于洋流的作用会随水流不断移动,而搭载于AUV或水下滑翔机的节点更可以自主规划自身的运动方式,且混合USNs也是USNs未来的发展趋势.因此,如何充分合理地利用节点所特有的移动特性,自适应、自组织地实时构建高动态网络拓扑结构,实现网络资源的合理调配和多节点之间的信息共享与协同计算,以保证系统灵活稳定的跟踪性能也是未来的一个重要研究方向.
3)由于大多数的水下目标跟踪算法都是以模型为基础的,因此,建立一个准确合理的目标运动模型是实现高精度水下目标跟踪的基础.而随着水下目标的机动性能的不断增强,且非合作目标机动状态一般都是先验未知的,加上水下目标的运动状态容易受洋流等环境因素的影响,对机动目标建立完全符合实际运动规律的模型是十分困难的.因此,如何在深入研究洋流特性的基础上实现水下机动目标动态模型的精确构建和运动轨迹的可靠预测是一个极具挑战性而又非常棘手的问题.
4)由于海洋环境的复杂性和多变性,传统的水下目标跟踪方法很难获得良好稳定的跟踪性能.目标属性作为一个重要且独特的目标参数,可为更准确的目标跟踪提供保障.因此,可以利用现代信号处理新技术,将目标探测与识别融合到目标跟踪过程中,研究高实时性、多功能的综合水下目标跟踪系统,以突破现有水下目标跟踪数据量大和跟踪实时性差等瓶颈,这将为水下目标跟踪的研究提供一个新的思路.
5)在工程实际中,降噪技术日趋成熟,潜艇及舰船等的辐射噪声与回波强度越来越低,隐蔽性大大提高,加上海洋环境噪声大幅提升、干扰多等环境因素,导致节点接收信号的信噪比非常低.此外,当目标距离较远时,目标辐射的声信号经过远距离的传播,能量衰减非常大,相对于各种噪声来说,节点接收的信号十分微弱,信噪比也较低.这给水下目标跟踪技术的研究带来了不小的挑战.因此,亟待解决在低信噪比条件下的水下目标跟踪问题.
6)目前国内外对基于USNs的水下目标跟踪技术的研究尚处于起步阶段,USNs的海上试验还停留在节点通信、组网和定位的阶段.但由于水下通信、组网试验仍然存在各种未攻克的难题,对于USNs目标跟踪技术的研究和评估仍以理论研究和计算机仿真验证为主流方式.随着USNs的发展,如何将USNs目标跟踪技术的现有研究成果拓展至海上工程试验,并通过试验成果进一步指导理论研究是以后发展的必然趋势.
7 结束语
水下目标跟踪是海洋科学技术研究中必不可少的部分,在人类认识、探索、开发、利用以及保护海洋中起到至关重要的作用.USNs作为WSNs在水下的延伸为水下目标跟踪提供了新的途径.本文对基于USNs的水下目标跟踪技术进行综述,分别从水下传感器网络、水下目标跟踪模型、水下单目标跟踪技术、水下多目标跟踪技术以及高能效水下目标跟踪技术几个角度进行阐述.首先,简要介绍了USNs硬件平台的建设概况及其系统组成和分类,其次,介绍了水下目标运动模型和量测模型的构建以及环境对模型构建造成的影响;再次,从同步式融合和分布式融合两个方面来论述基于USNs的单目标跟踪技术,并比较了两种融合方式的优缺点;在此基础上,详细讨论了数据关联和随机有限集两种方法目前在基于USNs的多目标跟踪中的应用情况及其存在的问题;针对USNs面临的能耗问题,本文回顾了目前已有的能效优化措施,并对各种方法的基本原理、适用性以及存在问题进行了详细的总结.最后,本文指出了基于USNs的目标跟踪目前存在的挑战,并对未来的发展方向进行了展望.虽然目前国内外针对基于USNs的目标跟踪的研究取得了一些初步的成果,但是还需要更多、更深入的研究.
