基于高黏附可拉伸高分子材料的人机交互界面
2021-04-17刘忆旋杜晓慧
张 鋆,刘忆旋,杜晓慧,杨 辉
(天津大学理学院,天津市分子光电科学重点实验室,天津300072)
生物体通过躯体感觉、嗅觉、味觉和神经系统反应等各种物理、化学和生物界面来感知和适应周围环境,保持内外平衡[1]. 其中,界面信息的有效交换具有复杂、精确、多模态及一致性等优点,激发了研究人员对动态界面科学研究的热情,为智能人体信号监测技术发展提供了启发[2,3]. 随着柔性电子技术和人工智能算法的蓬勃发展,将柔性传感器与人工智能、大数据和5G通讯有机结合,能够构建以人为中心的智能人机交互系统,应用于人体信号动态感知和实时数据分析反馈,实现宏观物理世界与虚拟网络空间之间的高度交织[4]. 为了更好地理解人机交互系统中的界面问题,研究人员提出了人机交互界面的概念,其能够提取生物体的物理、化学和生物信号,并将这些信号与电子、通信和计算等新型技术紧密关联[5],广泛应用于健康监测[6]、智能机器人[7]及柔性可穿戴器件[8]等领域.
作为连接人体信号与网络空间的人机交互界面,皮肤电极可贴合于人体皮肤表面[图1(A)][9],以无创的方式采集各种电生理信号等,结合人工智能算法和互联网通讯技术,构建智能人机交互系统,对人体数据进行实时分析和动态反馈,实现人与信息的高效交流,广泛地应用于智能假肢[10]、电子医疗[11]及运动监测[12]等医疗健康领域. 皮肤电极主要由可拉伸导电材料和基底材料组成,其中可拉伸导电材料赋予电极在拉伸状态下良好的电子导电性,基底材料为电极提供了良好的拉伸性、高黏附性及低界面阻抗,两种材料协同作用从而实现人体体征信号的长时间稳定且准确的监测. 对于不可拉伸、低黏附的皮肤电极而言,其在皮肤发生大形变时仍保持初始形状,因而容易在皮肤表面发生滑移或者脱落,使电极与皮肤之间的界面阻抗发生剧烈变化[图1(B)],导致人体信号监测的不稳定性[图1(D)]. 但对于具有良好拉伸性和高黏附性等力学性能的皮肤电极而言,其能够随着皮肤的运动而运动,完美地贴敷于皮肤表面,保持与初始状态相同的界面阻抗[图1(C)],可以实现人体信号监测的动态稳定性[图1(D)]. 因此,如何实现皮肤电极的可拉伸性、高黏附性等力学特性,让其完美地贴敷于皮肤表面,构建高灵敏度、高动态稳定的人机交互界面,是智能人机交互界面的重要研究方向[13,14].

Fig.1 Adhesive and stretchable property of on⁃skin electrode for enhancing the stability of human signal detection[9]
目前,应用于人机交互界面的皮肤电极主要是由Ag/AgCl和丙烯酸酯类聚合物构成的商业凝胶电极,这种凝胶电极具有不可拉伸、防汗性差和生物相容性差等问题. 一方面,由于电极不具有拉伸性,在皮肤发生大形变时,电极会在皮肤表面滑移,使界面阻抗发生变化,从而产生运动伪差,影响监测数据的准确性[15~18];另一方面,由于电极的防汗性差,汗水能够降低电极的界面黏附能,引起电极在湿润皮肤表面的滑移甚至脱落,影响监测数据的稳定性[19,20]. 此外,电极还存在一定刺激性,常常会引起皮肤的过敏反应. 因此,商业凝胶电极不适用于人体电生理信号的长期稳定监测. 与商业电极相比,基于弹性聚合物的可拉伸皮肤电极可以随着人体皮肤形变而发生变形,减少人体运动对监测信号质量的影响,灵敏、准确地监测电生理信号. 但由于这些聚合物材料具有疏水性,人体运动分泌的汗液会在电极基底与皮肤界面形成水膜,导致电极在皮肤表面发生位移或者脱离,从而影响信号的真实性和稳定性,限制了可拉伸电极在电生理信号长时间监测中的进一步应用. 因此,从材料的角度出发,设计合成高黏附可拉伸性的高分子材料,建立高动态稳定的人机交互界面,促进高效的信息交互,是实现柔性电子器件的有效性、稳定性和高灵敏性的关键环节. 近几年,高黏附可拉伸皮肤电极备受关注,一系列高黏附可拉伸高分子材料的成功设计及制备推动了皮肤电极在稳定人机交互界面领域的进一步应用.
本文主要综合评述了基于高黏附可拉伸高分子材料的人机交互界面的研究进展,讨论了高黏附可拉伸高分子材料的设计策略、合成方法及材料性能;论述了高黏附可拉伸高分子材料在长时间动态心电监测、肌电监测和脑电监测等高动态稳定人机交互界面上的应用前景;总结了高黏附可拉伸高分子材料研究存在的问题并展望了下一代智能人机交互界面的发展方向. 高黏附可拉伸皮肤电极能够通过无创的方式长时间、稳定、准确地采集人体电生理信号. 设计开发高黏附可拉伸高分子材料能够为建立稳定的人机交互界面打下坚实的材料基础,对未来的柔性电子产业发展尤为重要.
1 高黏附可拉伸高分子材料
从材料角度来看,皮肤电极主要是由可拉伸导电材料和基底材料构成的. 可拉伸导电材料能为皮肤电极提供良好的导电性,而基底材料为其提供高黏附性、可拉伸性和低界面阻抗. 因此,基底材料是实现皮肤电极的可拉伸性、高黏附性及构建稳定人机交互界面的关键材料基础[21~30]. 目前,应用于皮肤电极的基底材料主要是弹性聚合物,包括聚二甲基硅氧烷(PDMS)、聚己二酸/对苯二甲酸丁二酯(PBAT)、聚氨酯(PU)和氢化苯乙烯-丁二烯嵌段共聚物(SEBS)等[31]. 尽管这些弹性聚合物材料具有高拉伸性,但其在湿润界面具有低界面黏附能和高界面阻抗,限制了其在人体电生理信号的长期、稳定及灵敏监测上的进一步应用. 因此,从分子设计的角度出发,制备多种同时具有高黏附性和可拉伸性的高分子材料,结合可拉伸导电材料构筑皮肤电极,实现电极与皮肤的力学匹配和高度共形,建立稳定的人机交互界面,正逐渐成为智能人机交互界面的研究热点[32,33].
1.1 基于丝素蛋白的高黏附可拉伸高分子材料
丝素蛋白作为从蚕丝中提取的一种天然高分子蛋白,具有独特的力学性能、可控的降解速率及良好的生物相容性[34~36],特别是其力学性能随着外界环境水分的增加而变化,近年来被广泛应用于柔性电子器件领域[37~40]. 但丝素蛋白薄膜作为皮肤电极黏附层材料具有高杨氏模量(5~12 GPa)和低拉伸性(<20%),限制了其在高动态稳定人机交互界面中的实际应用. 为了解决上述问题,Chen等[41]利用向丝素蛋白中加入CaCl2的方法成功制备了可拉伸丝素蛋白薄膜. Ca2+通过电荷相互作用与丝素蛋白结合,并从环境中吸收水分子. 当环境相对湿度为50%时,丝素蛋白薄膜含水量增加到14%. 含水量的增加导致其杨氏模量降低到1.66 MPa,同时薄膜拉伸应变提高至400%. 这是由于丝素蛋白薄膜的力学性能由晶区和非结晶区共同控制,含水量增加使丝素蛋白晶区中氢键含量减少,同时在水分子和Ca2+的共同作用下,非结晶区中延展性好的二级结构相对含量增加,而延展性差的β-折叠构象减少,二者协同作用提高了丝素蛋白薄膜的拉伸性能. 研究人员利用热蒸镀法在丝素蛋白薄膜表面蒸镀了具有微裂纹结构的金纳米薄膜,制备了具有100%拉伸应变的丝素蛋白电极,其界面阻抗仅为7 Ω/sq. 在90°剥离角度和6 mm/min剥离速度下,丝素蛋白电极在皮肤表面的黏附强度为80 N/m,而商业聚酰亚胺胶带在皮肤表面的黏附强度仅为50 N/m. Jo等[42]将含有Ca2+和甘油的丝素蛋白与图案化的导电银纳米线结合,制备了拉伸应变大于400%的高黏附可拉伸皮肤电极,实现了丝素蛋白与纳米材料的复合功能化.该复合电极在猪皮表面的剥离力为10 N/m,表现出与商业医用黏合剂相当的界面黏附力,通过加入甘油诱导生成一定量的β-折叠构象,增加交联点,有利于提高丝素蛋白凝胶的稳定性,为生物相容、可降解的天然高分子材料在智能人机交互界面领域提供了潜在的应用前景.
丝素蛋白能够与金纳米薄膜、银纳米线等导电金属材料结合来制备高黏附可拉伸皮肤电极,但受限于热蒸镀法等制备技术,该策略具有高成本、无法大面积制备等缺点. 为了实现基于丝素蛋白的皮肤电极的低成本、大面积制备,Yang等[9]通过将Fe3+预先加入到丝素蛋白凝胶中作为引发剂,实现吡咯在丝素蛋白凝胶表面的界面聚合,成功制备了高黏附可拉伸全聚合物复合电极CAPE[图2(A)]. 界面聚合在丝素蛋白黏附层与聚吡咯导电层之间形成了交叉互锁结构,调控了应力在聚吡咯薄膜的分布,实现了刚性聚吡咯薄膜的可拉伸性. 他们以CAPE 电极为导体连接LED 灯和电源,随着电极拉伸到30%,LED灯的光强没有发生明显变化,表明CAPE在拉伸状态下具有良好的电学稳定性[图2(B)]. 此外,CAPE电极被完美地贴敷于人体的肘部,电极表面呈现出人体皮肤的褶皱结构,并随着肘部运动而拉伸[图2(C)],表明CAPE 电极具有高黏附性及与人体皮肤相匹配的拉伸性. 随着环境相对湿度从31.0%增加到94.6%,商业凝胶电极在PDMS皮肤模型表面的黏附能降低至2.6 J/m2. 与商业凝胶电极相反,环境相对湿度增加可使CAPE 电极的黏附能从0.9 J/m2增强到40 J/m2[图2(D)]. 这是因为随着相对湿度的增加,CAPE电极的含水量增高,其杨氏模量从236 MPa降低到2.1 MPa[图2(E)],增大了电极与皮肤的接触面积[图2(F)],进一步增强了电极在湿润界面的黏附能. 不同于商业电极在湿润皮肤表面的自由滑移,CAPE电极能够承受100 g砝码的重量[图2(G)],牢牢黏附在湿润的猪心表面. 研究结果表明,丝素蛋白薄膜特殊的水分响应特性使CAPE电极在汗液存在下仍然可以保持高黏附能和可拉伸性. 该研究巧妙地利用界面聚合方法解决了导电高分子聚吡咯不可拉伸的问题,使其在长时间动态电生理信号监测方面具有潜在的应用前景.
皮肤电极在高黏附性和易去除性方面难以兼顾,高黏附强度使其在老人和新生儿脆弱的皮肤上去除时不可避免地造成皮肤损伤[43,44]. 为了实现高黏附电极的易去除性,Liu等[45]以设计具有强黏附力和易剥离特性的仿生微柱结构为切入点,利用旋涂法在微柱表面包裹丝素蛋白黏附层,制备了黏附强度可调节的可拉伸MSFA膜[图3(A)]. 同时通过调控微柱的直径和密度等结构参数,实现了MSFA的易剥离特性. 在180°剥离角和5 mm/min剥离速度下,医用胶带在聚对苯二甲酸乙二醇酯表面的剥离力为162.6 N/m,而MSFA膜的剥离力仅为61.5 N/m. 此外,在玻璃表面进行10次黏附/剥离循环后,商业医用胶带黏附能从11.48 J/m2下降到1.67 J/m2,黏附能损失了85%;与商业医用胶带相比,MSFA的黏附能仅损失了30%,这表明仿生微柱结构使MSFA膜具有优异的易剥离性质和可重复使用性. Liu等[45]以MSFA膜为柔性衬底,结合可拉伸碳纳米管导电层,制备了可拉伸应变传感器[图3(C)]),该传感器在皮肤发生各种大形变后仍然保持高度的共形性[图3(D)],表明MSFA膜在皮肤表面具有高黏附性. 与医用胶带剥离时将毛发黏除相对比,剥离MSFA未引起皮肤明显形变以及毛发黏除[图3(E)],表现出优异的易剥离性质. 该研究通过设计仿生微柱结构成功实现了MSFA膜的易剥离特性、可重复使用性及高黏附性,为未来可长期重复使用的人机交互界面提供了关键材料和技术. 但同时也受限于仿生微柱的特殊结构,使其在玻璃等刚性基材表面由于接触面积较小导致黏附能较低.

Fig.2 Bio⁃composite conformal electrodes based on SF and PPy(CAPE)[9]
综上所述,利用丝素蛋白制备高黏附可拉伸高分子材料的方法简单易行、成本低廉、绿色环保,能够成功实现皮肤电极的可拉伸性和高黏附性,使其完美地贴敷于皮肤表面,为构建高动态稳定的人机交互界面提供了新的材料和方法. 但该方法也存在一定的局限性:皮肤电极的高黏附性主要依赖于丝素蛋白基底的含水量,而其含水量的多少与环境相对湿度密切相关. 在高相对湿度的环境下,丝素蛋白基底的含水量增加,皮肤电极具有较高的黏附强度;而在低相对湿度的环境下,丝素蛋白基底逐渐失水,杨氏模量变高,皮肤电极黏附强度降低,无法贴敷于皮肤表面. 因此如何有效防止丝素蛋白薄膜的水分蒸发问题需要进一步研究解决.

Fig.3 Micro⁃structured silk fibroin adhesives for flexible skin sensors[45]
1.2 基于聚多巴胺的高黏附可拉伸高分子材料
海洋生物贻贝通过分泌一种特殊的贻贝黏附蛋白,可在潮湿的环境下牢固地黏附在各种基材表面. 研究表明,含有邻苯二酚基团的3,4-二羟基-L-苯丙氨酸(DOPA)是贻贝黏附蛋白的重要组成部分,在贻贝黏附过程中起重要作用[46~48]. 多巴胺作为DOPA的重要衍生物,同样可以在各种基材表面实现强黏附. 近年来,受贻贝黏附启发制备的聚多巴胺(PDA)材料因具有良好的生物相容性和组织黏附性而备受关注,为实现高动态稳定的人机交互界面带来了新的希望.
高黏附高分子材料的黏附性能容易受到环境中水的影响而降低,如何实现防水的人机交互界面一直以来受到了研究者的特别关注. Ji等[49]利用多巴胺甲基丙烯酰胺(DMA)、丙烯酸(AA)和丙烯酸甲氧基乙酯(MEA)等单体,通过自由基聚合制备了防水的高黏附可拉伸高分子材料PDAM,同时结合具有微裂纹结构的可拉伸Au/PDMS薄膜,构建了防水的可拉伸复合电极PDAM/Au/PDMS[图4(A)]. 其中,DMA单体的引入能够为黏附层提供水下的高黏附性;MEA单体的引入为黏附层提供了高稳定性;AA单体的引入能够提供游离离子,赋予黏附层良好离子导电性和低界面阻抗,同时为PDAM内部提供了酸性环境,有效防止邻苯二酚基团被氧化,保持高黏附性能[图4(B)]. 将电极从空气环境转移至水下环境中时,商业凝胶电极在PDMS皮肤模型表面的黏附能降低到原来的1%,几乎完全丧失黏附性;而复合电极在水下仍保持正常条件下的黏附力[图4(C)],并且经历10次水下黏附/剥离实验后,其黏附性未明显下降[图4(D)],表明复合电极具有良好的防水性和可重复使用性. 此外,PDAM内部的羧基基团电离释放大量离子,为可拉伸复合电极提供了低的界面阻抗,能够提高电生理信号监测的灵敏度. 当将可拉伸复合电极贴敷于人体的胸部[图4(E)],用于游泳过程中心电信号的长时间监测时,可以得到稳定、准确的水下心电信号[图4(F)],证明了基于PDAM 的可拉伸复合电极具有良好的防水性能.
聚多巴胺可以通过共价键键合(麦克尔加成、席夫碱反应等)和非共价键键合(氢键、疏水相互作用、阳离子-π相互作用等)等多种作用机制黏附在不同基材表面,增强人机交互界面的防水性能,其中儿茶酚基团起主导作用,提供与界面间的非共价键合,儿茶酚基团氧化后形成的醌基可与猪皮等含胺基的表面产生共价键键合. 因此,如何使材料内部儿茶酚基团和醌基达到最佳平衡浓度是获得高黏附性能的关键. 在碱性有氧环境下,儿茶酚基团易被过度氧化,导致材料的黏附性能下降[50]. 为解决上述问题,Han等[51]基于仿贻贝黏附化学和纳米复合增强概念,发展了超强自黏附水凝胶合成策略. 他们将多巴胺(DA)插层到二维层状纳米黏土(clay)层间,使其在有限的空间内发生氧化聚合,得到聚多巴胺(PDA)插层的纳米黏土;然后加入丙烯酰胺(AM)单体和交联剂,使丙烯酰胺进一步插层于纳米黏土中,引发AM单体原位聚合,制备了聚多巴胺-黏土-聚丙烯酰胺(PDA-clay-PAM)纳米复合水凝胶. 其中,聚多巴胺插层的纳米黏土片可作为功能型纳米增强剂,使水凝胶拉伸应变可达4800%. 通过模拟海洋生物贻贝黏附盘中有限的空间,使多巴胺在纳米黏土层的纳米空间内仅发生有限氧化,有效防止了多巴胺过度氧化现象,使PDA 保持了足够多的自由酚羟基,这是该水凝胶具有反复黏附能力的关键. 实验结果表明,复合水凝胶在猪皮表面黏附能可达28.5 kPa. 与传统氧化剂(FeCl3,NaIO4)氧化不同,采用纳米黏土介导DA氧化的方法保留了大量酚羟基,为水凝胶提供了超强黏附性和反复使用性.该水凝胶材料表面有水时无法发生黏附,但表面水一被去除,强黏附性能立即恢复,其机理仍需要进一步探究. He等[52]将带正电荷的微凝胶聚(N-异丙基丙烯酰胺)(PNIPAm)引入聚(丙烯酸-丙烯酰胺-多巴胺)(PAAc-PAM-PDA)水凝胶基质中,成功将水凝胶的黏附能力提高了8倍. 这是因为PNIPAm作为多功能物理交联点增加了水凝胶的交联密度,平衡了黏附与内聚,使该水凝胶在各种基材表面黏附能达到15 kPa左右,单纯借助黏附力可悬挂500 g重物;另外,化学交联和物理交联协同作用赋予了水凝胶良好的拉伸性能和高效的自愈能力,拉伸应变可达660%.

Fig.4 Water⁃resistant conformal hybrid electrodes based on pDAM polymer[49]
单宁酸(TA)中含有大量功能性邻苯二酚和邻苯三酚基团,与贻贝黏附机制相似[53],为制备高黏附可拉伸高分子材料提供了新思路. Cui等[54]利用盐浸策略制备了基于生物相容性良好的壳聚糖(CS)和聚丙烯酸(PAA)的双网络纳米复合水凝胶. 他们首先在壳聚糖溶液中原位聚合丙烯酸,同时加入单宁酸包覆的纤维素纳米晶(TA@CNC)增强拉伸性能,再通过浸入NaCl溶液中的方法屏蔽壳聚糖中正电荷氨基的静电排斥效应,诱导壳聚糖发生物理交联形成二级网络,成功制备了可拉伸、抗疲劳的CS/PAA/TA@CNC导电水凝胶[图5(A)]. 水凝胶内部同时含有大量邻苯二酚、邻苯三酚基团和质子化的氨基基团,可通过多种相互作用机制牢固贴敷在各种基材表面[图5(B)],在木材、铜片和玻璃表面的黏附能分别达到19,14 和20 kPa;研究发现,将盐浸时间从0 min 延长至60 min,水凝胶拉伸应变从450%增加到800%,断裂能从92 kPa 增加到1000 kPa,因此可通过调节盐浸时间实现水凝胶力学性能的可控性. NaCl电解质释放的大量离子可在水凝胶内部多孔网络结构中自由运动,小于1.0%的应变和大于50%的应变都能被水凝胶准确地监测[图5(C)和(D)];300%应变时,量规因子为3.0,表明该水凝胶具有良好的导电性和应变灵敏性[图5(F)];其在20%重复应变下能够稳定应用[图5(E)],作为应变传感器应用时,能够清楚地感知人体的不同运动状态. 同时,壳聚糖赋予水凝胶良好的抗菌能力,为材料在人体上安全稳定的应用提供了独特的可借鉴性成果. 该研究通过改变盐浸时间来控制壳聚糖的交联程度,从而实现水凝胶拉伸性能的可调节性,同时水凝胶可在水下稳定黏附于基材表面,满足皮肤电极对防汗性的要求;但经过反复循环拉伸后,由于水凝胶的水分蒸发会导致其电阻发生变化. 因此如何有效防止该水凝胶水分蒸发是其实现长期稳定应用所面临的一项挑战.

Fig.5 Chitosan/poly(acrylic acid)double⁃network nanocomposite hydrogels for flexible sensors[54]
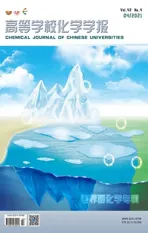
为了增加皮肤电极在干湿界面高的黏附力和实现易去除性,建立稳定的人机交互界面,本课题组[55]利用多巴胺在丝素蛋白薄膜中自聚合得到PDASF杂化水凝胶,将其作为黏附层与具有微裂纹结构的SEBS/Au薄膜结合,成功制备了具有510%拉伸应变的AWS皮肤电极[图6(A)]. 在300%的应变下,PDASF 黏附层与Au纳米薄膜间无分层现象,保证了电极的电学稳定性. 多巴胺的引入缓解了黏附凝胶层的水分蒸发,同时有助于电极吸收环境水,当环境相对湿度由30%变为100%时,商业电极在PDMS皮肤模型表面的黏附能从2.70 MPa下降到0.86 MPa. 与之相反,AWS电极含水量增高时其黏附能由3.16 MPa增加到9.87 MPa,且电极在300%应变下仍能稳定黏附在湿润猪心表面. 另外,凝胶黏附层中的Ca2+提供了低的界面阻抗,在同一环境相对湿度下,与SEBS/Au 薄膜相比,AWS 电极界面阻抗降低了一个数量级,这赋予了AWS电极良好的灵敏性. 值得注意的是,丝素蛋白中自由链段具有良好的亲水性,使其具备可清洗功能,能够在完成长时间心电监测后轻易通过水冲洗去除,有效避免了商业电极因撕扯造成皮肤损伤的缺陷. 研究人员通过AWS电极对5个志愿者进行实时动态心电信号监测[图6(B)],成功验证了AWS皮肤电极在干湿界面的高黏附性和易去除性. 该研究通过向丝素蛋白基质中引入聚多巴胺的方法有效解决了丝素蛋白薄膜水分蒸发导致拉伸性和黏附性下降的问题,但自聚合的方法容易导致聚多巴胺无法保持较多的游离邻苯二酚基团,不利于PDASF黏附层黏附性能的进一步提高.
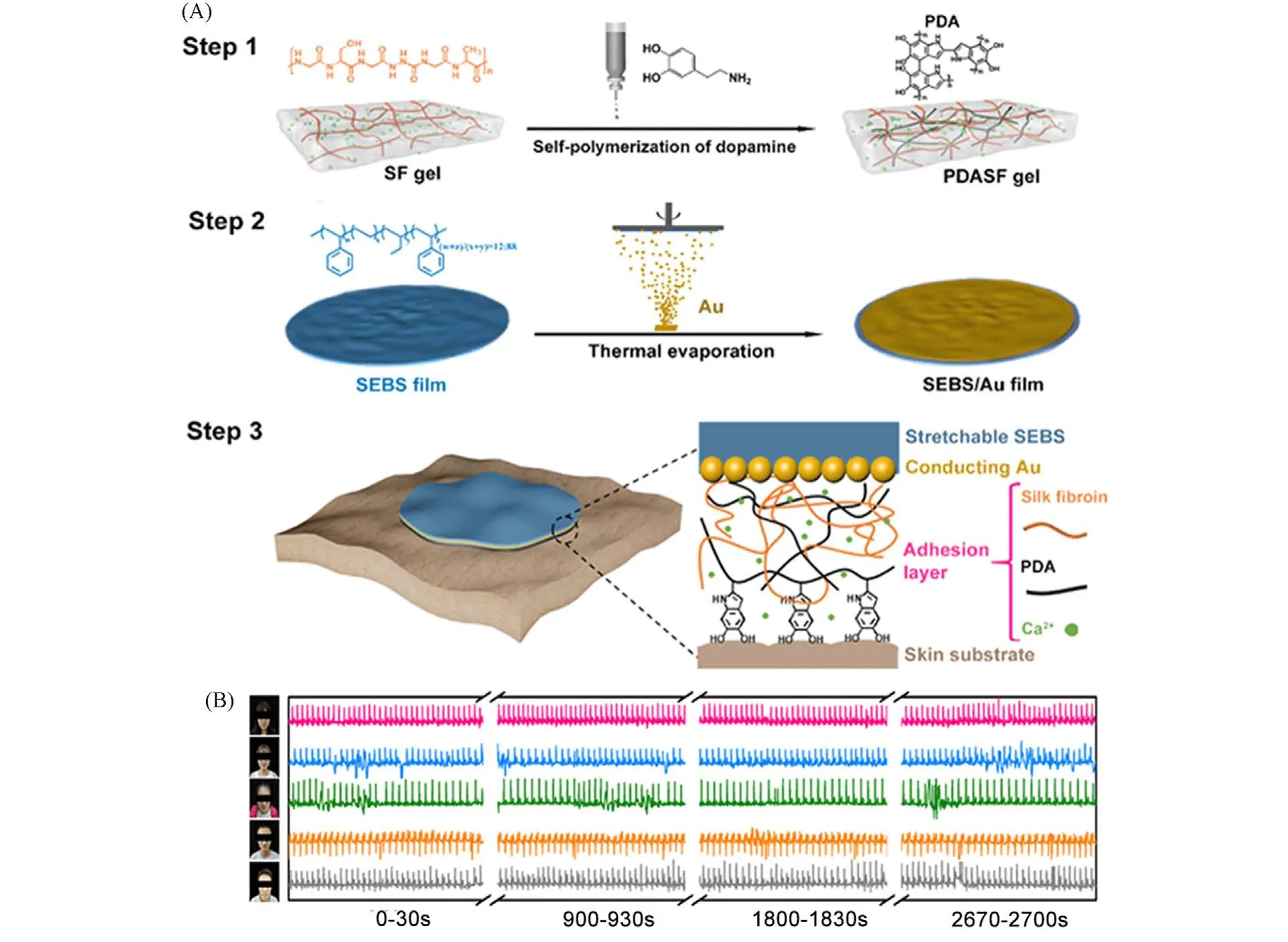
Fig.6 Highly adhesive and stretchable AWS electrodes based on polydopamine and silk fibroin[55]
综上所述,利用聚多巴胺材料的高黏附仿生原理,研究人员通过自由基共聚、纳米黏土介导DA氧化、添加微凝胶及纳米复合交联等方法成功制备了一系列高黏附可拉伸高分子材料,以这些高分子材料为黏附层的皮肤电极能够完美地贴敷于皮肤表面,被应用于水下心电监测、人体运动监测及冠心病的早期诊断等. 传统聚多巴胺材料的拉伸性较差及邻苯二酚过度氧化导致其黏附性能下降的问题是限制其实际应用的关键. 一方面,添加纳米材料的方法可增强水凝胶内部的交联程度,提高聚多巴胺材料的拉伸性;另一方面,使聚多巴胺材料具备高黏附性的关键是保持足够多的自由酚羟基,实现酚羟基和醌基之间的动态平衡,因此,如何有效防止邻苯二酚基团的过度氧化问题,在材料创新和理论研究方面仍需进一步探索.
1.3 高黏附可拉伸两性离子聚合物材料
两性离子聚合物是一种重复单元含有独特两性离子基团的带电荷聚合物. 由于自身偶极矩大,其能够与其它界面间发生离子-偶极和偶极-偶极相互作用而使材料表现出高黏附性能[56,57];同时能够协助离子沿高度两极化的聚合物骨架迁移,促进离子导电[58,59];另外,两性离子可以增大水凝胶内部的物理交联程度,提高其力学性能,是制备高灵敏人机交互界面的优秀候选材料之一. Wang等[60]在纳米黏土存在下引发两性离子[2-(甲基丙烯酰氧基)乙基]-二甲基-(3-磺丙基)氢氧化铵(SBMA)和甲基丙烯酸羟乙酯(HEMA)自由基共聚,使材料内部发生物理交联制备了可自愈的纳米复合水凝胶. 具有多个可逆键的网络结构使水凝胶发生形变时能均匀分散应力,有效耗散能量,断裂应变达2000%,断裂强度为0.27 MPa,韧性达2.45 MJ/m3;在搭接剪切强度测试中,该水凝胶在硅橡胶、丁腈橡胶和玻璃基材表面的黏接强度分别为6.2,24.2和17.6 kPa. 这些优良性能使其在高灵敏人机交互界面具有良好的应用前景. 该研究通过加入一定量的纳米黏土来增加水凝胶的交联程度,提高其力学性能,但纳米黏土含量过高会使两性离子分子链被纳米黏土吸附,不能暴露于水凝胶表面,导致其黏附性能下降,而且两性离子含量不同造成水凝胶表面两性离子的分子构象不同,使其在阴离子水凝胶和阳离子水凝胶表面的黏附行为存在显著差异,因此该水凝胶存在黏附性能对反应物含量过于敏感的问题. Yang等[61]以天然植物中提取的纤维素纳米晶(CNC)为物理交联剂和增强剂,在少量NaCl存在下,通过紫外光照引发两性离子SBMA与丙烯酰胺(AM)共聚,巧妙结合物理交联与化学交联,成功制备了兼具导电、高拉伸和自黏附性能于一体的CNC@P(SBMA-co-AM)纳米复合水凝胶[图7(A)]. 该水凝胶通过引入CNC作为纳米交联材料有效改善了两性离子水凝胶力学性能,加入NaCl能够增强水凝胶的离子导电性,同时在水凝胶内部与SBMA产生非共价相互作用. 该水凝胶最大断裂强度为610.36 kPa,断裂应变可达1127%;在猪皮表面表现出10.5 kPa的高黏接强度. 当其被用作皮肤传感器时,能够无缝贴合在面部、下颚等部位,准确采集微小的生理信号(如表皮振动),结合机器学习算法,高效准确地实现语言识别功能[图7(B~D)],同时可以准确监测到手指连续弯曲等微小运动[图7(E)],在智能语音识别、发音康复、人体运动监测等智能人机交互界面领域具有的巨大应用前景.
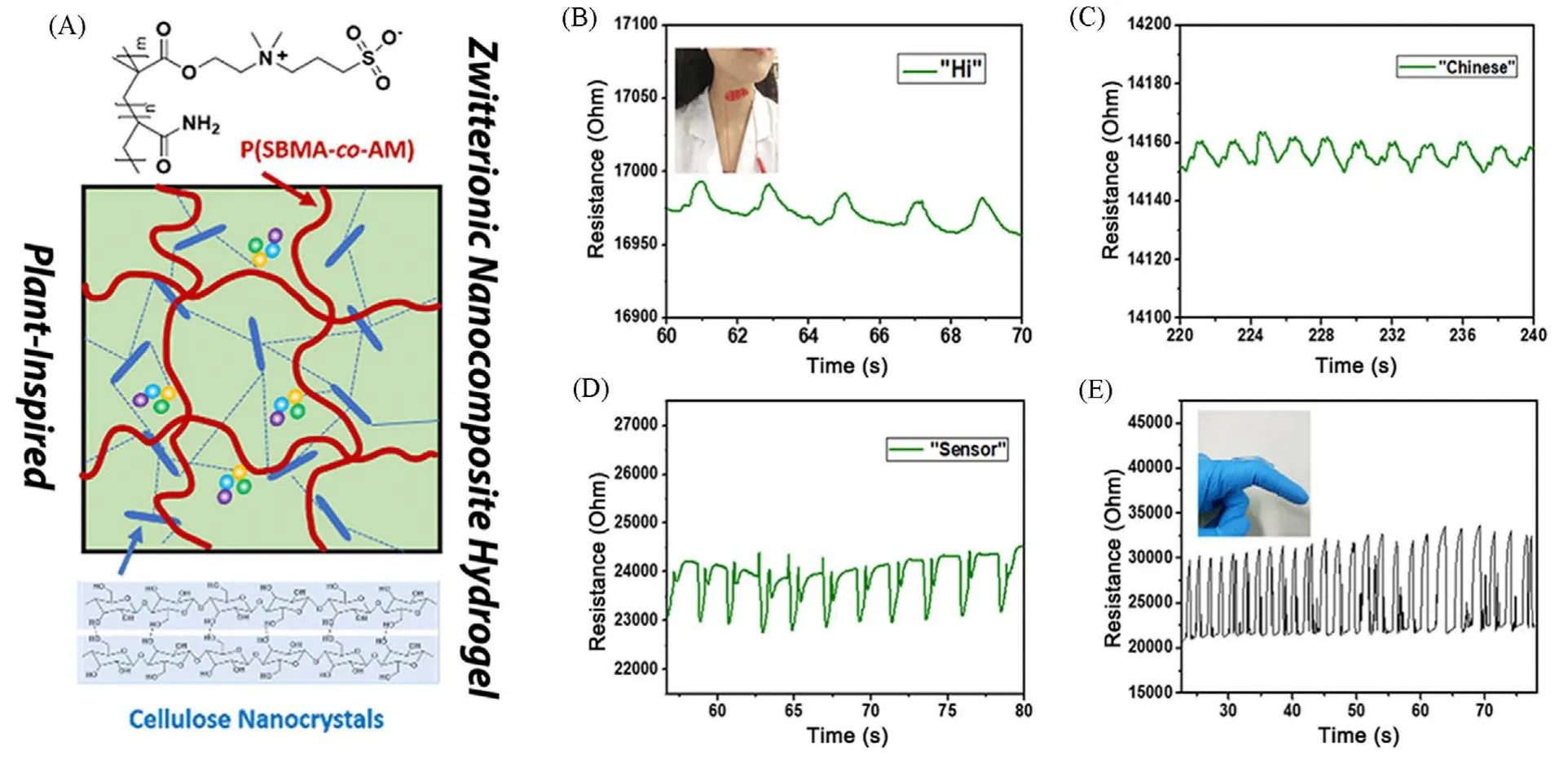
Fig.7 Highly stretchable and adhesive zwitterionic nanocomposite hydrogel[61]
1.4 基于干燥黏合机制的新型双面胶材料
黏合剂一接触干燥界面即可通过氢键、范德华力和静电作用等分子间作用力黏附于基材表面,从而构建稳定的人机交互界面. 但由于水分子对界面间分子接触的物理隔绝,黏合剂在湿润界面实现瞬时黏附具有挑战性. 自然生物展现出完美的湿黏附能力,研究表明其黏附机制通常是与界面接触后,首先排开基材表面的水分子,随后与界面发生强相互作用实现湿润界面黏附[62,63]. 受自然生物启发,Yuk 等[64]设计合成了一种由侧链含N-羟基琥珀酰亚胺丙烯酸酯的聚丙烯酸与天然高分子聚合物明胶(gelatin)或壳聚糖(CS)交联的新型双面胶DST. 当DST 与湿润的猪皮表面接触时,能够迅速吸收组织界面的水而与猪皮发生静电作用,5 s 内形成黏接强度大于120 kPa、界面韧性超过710 J/m2的有力黏附,随后DST中马来酰亚胺酯基与猪皮表面氨基进一步形成共价键,保证了黏附的牢固与持久性,在湿润组织界面黏附14 d后仍保持高黏附强度. 同时,DST薄膜达到吸水平衡后形成的水凝胶薄膜断裂韧性可达1000 J/m2,拉伸倍数超过16倍. Yuk等[64]将DST杂化凝胶薄膜与导电油墨结合制备了可拉伸传感器,在模拟跳动的湿润猪心脏上进行了应变和电生理信号监测,获得了与模拟跳动一致的心脏跳动曲线,验证了DST的高黏附性. 该新型干性双面胶DST的设计新颖,可应用于临床中伤口密封和快速止血、药物释放等不同场景,但其应用于干燥界面时仍存在一定局限性,例如干的DST薄膜需首先吸水形成水凝胶薄膜,使其具备与人体组织相匹配的力学性能,再与人体组织进行黏附.
1.5 自修复高黏附可拉伸高分子材料
聚合物水凝胶材料具有与皮肤组织相似的柔软性及良好的生物相容性,在电子皮肤、可穿戴器件和软机器人等领域有着广泛的研究和应用[65~68]. 随着柔性电子器件的快速发展,构建集良好的力学性能、响应性和自愈性等性能于一体的人机交互界面吸引了研究人员的关注,同时也对组成材料的力学性能和多功能性提出了新的要求和挑战.
水凝胶内部动态交联网络结构能够赋予材料良好的自愈能力,为了同时实现人机交互界面的高黏附性和自愈性,Zhang等[69]以Fe3+、多巴胺功能化的透明质酸(DHA)和聚丙烯酸(PAA)为基础,巧妙结合物理交联和化学交联,制备了具有800%拉伸应变的多功能导电水凝胶MFHs,该水凝胶在猪皮表面黏附能可达12.6 kPa,同时具备2 s内98%回复率的良好自愈功能. 该研究利用邻苯二酚基团与Fe3+的可逆配位作用赋予水凝胶自愈性,并主要通过邻苯二酚基团与界面间的相互作用发生黏附,因此Fe3+含量及其与邻苯二酚基团的配位作用是否会对水凝胶黏附性产生影响还需做进一步研究探讨.
Liao 等[70]在硼酸盐的存在下,使导电功能化的单壁碳纳米管(FSWCNT)、聚乙烯醇(PVA)和聚多巴胺(PDA)发生动态交联,制备了导电纳米复合水凝胶[图8(A)和(B)]. 研究发现,氧化聚合所得的PDA形成了许多氧化的醌基,同时保留了大量自由酚羟基,酚羟基和醌基之间的平衡使该水凝胶可反复黏附,在玻璃、猪皮、橡胶表面黏附能分别可达9.2,5.2和8.3 kPa,同时具备电导率2 s内恢复99%的高效自愈能力,作为人体运动检测装置可以清楚地感知人体从微小的生理信号到大幅度运动的各种复杂状态[图8(C~E)],为人机交互界面在运动监测及生物医疗领域的多用途应用提供了新思路. 该研究通过将导电碳纳米管与聚多巴胺有机结合,解决了聚多巴胺材料导电性差的问题,使制备的水凝胶兼具良好导电性和黏附性,满足应变传感器的需求. 但实验结果显示,与其它基材表面相比,该水凝胶在猪皮表面黏附能最低,因此如何使水凝胶内部酚羟基和醌基浓度达到最佳平衡,提高其在皮肤表面的黏附能,在理论研究方面仍面临挑战.
综上所述,丝素蛋白、聚多巴胺仿生材料、两性离子聚合物、新型双面胶材料及自修复高分子材料等多种高黏附可拉伸高分子材料发展迅速,受到国内外研究者的广泛关注. 利用多种策略设计合成的高黏附可拉伸高分子材料能够实现材料的可拉伸性、防汗性及生物相容性等优异的性能(表1). 此外,具有超薄、自修复、良好透光性等特性的可重复黏附的多功能高分子材料的合成为制备高动态稳定人机交互界面,实现智能人机交互提供了丰富的材料基础和技术储备,被广泛应用于长时间、稳定的人体体征信号感知、传递和反馈,特别是长时间动态人体电生理信号监测领域. 基于高黏附可拉伸高分子材料的人机交互界面能够实时、准确监测人类日常的心电、肌电和脑电信号等人体电生理信号,为实现疾病的早期诊断、智能人机操控、远程医疗、情感-认知互动等提供大数据支持. 例如,通过人机交互界面获取残疾人士残肢的肌电信号,识别其运动意图并完成假肢的精密控制;通过长时间监测人体心电信号对使用者心脏异常情况发出及时预警;通过人机交互界面感知脑电信号并实施外部刺激,应用于老年痴呆等疾病的早期治疗等.

Fig.8 Wearable,healable and adhesive mussel⁃inspired conductive hybrid hydrogel[70]
Table 1 Summary of highly adhesive and stretchable polymers using different strategies
2 基于高动态稳定人机交互界面的人体电生理信号监测
人体电生理信号是由细胞进行生命活动时带电离子(如Na+,K+,Cl−和Ca2+等)跨膜运动引起的生物电现象产生的. 这种生物电现象发生在多种尺度上(包括单离子通道蛋白、神经元和心脏等整个器官),能够通过导电组织和体液传播到体表. 将测量电极置于体表一定部位获得有规律的电变化,可以长时间实时监测人体的各种电生理信号,是临床诊断神经系统疾病、心血管疾病、中风和癌症的有效手段[1]. 作为连接人体信号与网络空间的人机交互界面,基于高黏附可拉伸高分子材料的皮肤电极能够克服传统商业电极拉伸性和防汗性差的缺陷,为人们提供实时稳定的电生理信号监测,并可结合智能算法获得即时信息反馈,是加快无创即时检查和个性化治疗体系实际应用的重要驱动力,在医疗保健、运动监测和人机交互等领域具有重大意义[71~75].
2.1 高动态稳定人机交互界面在心电监测上的应用

Fig.9 Gr/SF/Ca2+⁃based E⁃Tattoos[77]
心电信号(ECG)包含了大量的生理和病理信息,是临床诊断心律失常、冠心病等心血管疾病的常用手段[76]. 设计开发可穿戴式的移动心电监测系统,对心脏异常情况发出及时预警,是预防控制心血管疾病的有效手段. Wang等[77]通过将石墨烯和Ca2+加入丝素蛋白中的方法,制备了能够紧密贴敷在皮肤表面的可拉伸电子纹身[图9(A)]. 其相对电阻对皮肤应变能够产生灵敏响应[图9(B)],同时具有超强稳定性,如50%拉伸应变下可工作超过10000次[图9(C)]. 他们在志愿者前臂构建了两个电子纹身[图9(D)],进行了长达10 h的心电信号监测,获得了高信噪比的ECG,其中心电波形(P波、QRS波群、T波)干净清晰[图9(E)]. 此外,Son等[78]通过将纳米导电网络(CNTs/AgNW)嵌入可拉伸自修复聚合物的方法,开发了一种自修复人机交互界面. 基于聚合物基底的自黏附性,将互连的应变/ECG传感器和LEC发光装置集成到单个基底上,并将其贴敷于志愿者前臂进行ECG监测,在500 Hz采样频率下得到了波形稳定的ECG,各波峰经分析检验正确. 采集的心电数据能够无线传输到LEC阵列,基于研究人员的设计,LEC 阵列的发光功能能够根据不同心率值及应变值打开或关闭,实时反馈心率变化,提供稳定的动态心电监测. 这些具有良好拉伸性和自我修复能力的人机交互界面为下一代柔性可穿戴智能移动监测设备的发展奠定了基础.
对于新生儿重症监护病房中的早产儿和患有呼吸窘迫综合征等病情危重的患儿,必须长时间实时监测其心电信号. 但现有心电监测设备和商业电极具有体积大、可穿戴性差、舒适度差及容易引起皮疹等缺点,不适合应用于新生儿重症监护[79]. Chung等[80]通过微流控技术制备了一种基于柔韧轻巧、类皮肤人机交互界面的无线柔性心电器件,能够在临床场景中对新生儿进行非侵入性的实时生理监测,且移除时不会造成患儿任何皮肤损伤. 他们将传感器应用于健康新生儿(胎龄269 d,出生体重2.75 kg)和新生儿重症监护病房中的早产儿,获得了婴儿稳定、高质量的心电参数. 不同于有线电极阻碍婴儿肢体活动,无线传感器允许新生儿与父母亲密接触. 他们进一步将传感器应用于胎龄从196~280 d不等的新生儿(胎龄196 d的新生儿,体重低于1470 g)进行实时ECG监测,获得的信号质量不低于传统医疗监测仪器,满足临床标准,充分验证了该传感器的实际应用价值.

Fig.10 ECG recordings by soft polymer electrodes and the gel reference electrodes during swimming[81]
随着人们对健身运动科学化的不断重视,为了达到最佳运动效果,通过监测运动强度做出科学运动安排显得尤为重要. 心率和运动强度间存在紧密的正相关关系,是监测运动强度非常合适的指标参数. 但对游泳运动员需要在水下进行心电监测,现有商业凝胶电极的水下黏附失效和皮肤刺激性使其无法在游泳训练场景中实际应用. Stauffer 等[81]报道了一种由添加导电银纳米颗粒的聚合物柔性基底和具有多孔结构的高导电聚合物涂层组成的可拉伸人机交互界面,10 Hz 时其界面阻抗仅为43 kΩ∙cm2,低于现有商业凝胶电极66 kΩ∙cm2的界面阻抗. 此外,该界面能够完美贴合皮肤,且经过10 h应用后未对志愿者皮肤产生刺激. 将可拉伸电极和商业电极同时贴敷于专业游泳运动员前胸及腰侧[图10(A)],对运动员蛙泳训练过程进行水下ECG实时监测,心电监测电子设备放置在运动员背部防水盒中[图10(B)],不会对游泳产生阻碍. 可以看到运动员入水之前展现出平稳的ECG 信号波形[图10(C)],商业电极与可拉伸电极噪声都很小,二者信号波形的差异是由于电极贴敷位置不同引起的. 随后运动员入水开始蛙泳,运动产生的信号噪声使商业电极采集的ECG波形发生畸变,而可拉伸人机交互界面黏附稳定并持续收集运动员蛙泳过程中的心电信号[图10(D)],并且在整个游泳过程中保持极佳的电极性能[图10(E)]. 这一研究为人机交互领域注入新鲜血液,推动了智能控制服务人类的进程.
2.2 高动态稳定人机交互界面在肌电监测上的应用
肌电信号(EMG)是在人体肌肉发生运动收缩时产生的一种微弱、复杂的生物电信号. 通过皮肤电极收集肌肉收缩或静止时的电生理信号,对人体肌肉状态进行监测和分析,在疾病诊断(如肌源性疾病、颈椎病等)、运动监测及人机交互(如假肢的多功能控制)等领域发挥着重要作用. 例如肢体残疾人士在生活自理、交通出行等方面存在着诸多不便. 随着人工智能的蓬勃发展,由肌电信号驱动的功能型假肢不断升级,能够通过肌电信号实时准确地识别出人的运动意图进而精准控制假肢,最大程度地恢复残疾人士的肢体运动功能,对于改善残疾人士的生活具有重要意义.
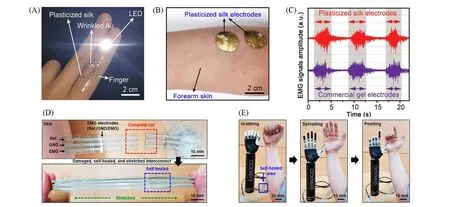
Fig.11 High conformability of plasticized silk electrodes(A—C)[41] and an ultrastretchable and self⁃Healable nanocomposite conductor(D,E)[82]for ambulatory EMG monitoring
肌电采集电极的力学性能关系着肌电信号的准确度和精确性,影响着EMG 在各个领域应用的研究效果[55]. Chen 等[41]报道了一种以丝素蛋白薄膜为柔性衬底的具有100%拉伸应变的人机交互界面.该界面兼具丝素蛋白的柔软性和金纳米薄膜的高导电率,其在被贴敷于手指并作为导体与电源和LED灯连接时,在2.7 V 的低压下成功使LED 灯发光[图11(A)]. 他们将丝素蛋白电极与商业凝胶电极贴合在志愿者前臂用于EMG监测[图11(B)],当志愿者将前臂重复地向身体内侧进行3 s的90°弯曲动作时,获得了实时的肌电信号图像,结果显示丝素蛋白电极采集的信号幅度和频率与商业凝胶电极表现出一致性[图11(C)],通过频域分析进一步验证了可拉伸人机交互界面收集信号的准确性. Kim等[82]报道了一种具有特殊导电自增强性质的无线自修复人机交互界面. 他们将其应用于志愿者前臂内收动作的肌电信号采集,得到了稳定清晰的EMG;将条形电极组成柔性三电极系统,在作为导体的同时连接智能假肢与志愿者前臂皮肤,通过实时采集前臂的肌电信号识别运动意图,完成了前臂假肢抓握动作、手指弯曲及指向动作的精准控制. 他们随后将柔性三电极系统切断,于60 ℃加热电极1.5 h后实现其自修复[图11(D)],并将修复后的电极重新应用于假肢的智能控制,仍精确地完成了假肢抓握、手指弯曲及指向动作[图11(E)],验证了该导电复合材料在假肢智能控制领域的应用潜力.
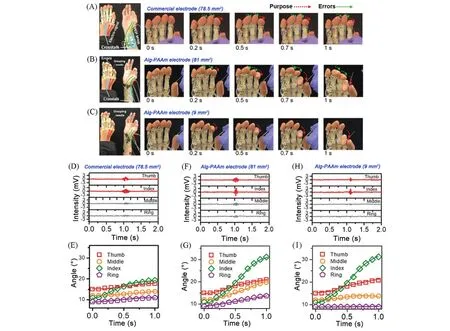
Fig.12 Driving the prosthetic hand to grasp a needle based on commercial and Alg⁃PAAm compliant electrodes and correlative sEMG signals[83]
Pan 等[83]报道了一种基于海藻酸钠-聚丙烯酰胺(Alg-PAAm)高黏附水凝胶的柔性人机交互界面.不同于商业电极只能监测7.2%肌肉最大随意收缩力(MVC)的肌电信号,该界面能够成功监测2.1%MVC的微弱肌电信号,且在监测小于10%MVC的信号时保持大于5∶1的高信噪比,表明该界面比商业电极灵敏度更高,可用于假肢的精确控制. 他们通过减小电极尺寸最大化地避免了信号监测时相邻肌肉收缩造成的信号串扰现象. 在志愿者进行抓取针头动作时,分别利用78.5 mm2商业电极、81 和9 mm2柔性电极实时监测志愿者拇指、食指、中指和无名指的肌电信号,并通过模式识别算法对信号进行处理,完成假肢动作的驱动. 图12(A)~(C)中绿色箭头表示志愿者抓取针头时拇指和食指的动态肌电信号. 结果显示,78.5 mm2商业电极采集的信号出现明显的来自中指和无名指的肌肉串扰[图12(D)],并对由采集信号驱动的假肢手指弯曲角度产生影响[图12(E)],假肢手指虽然由信号驱动发生弯曲,但商业电极的高界面阻抗引起信号失真,使假肢未成功完成抓取针头动作;并且即使志愿者的中指和无名指未发生弯曲,肌肉串扰也使假肢的中指、无名指做出弯曲动作[图12(A)]. 与商业电极不同,由81 和9 mm2柔性电极采集信号驱动的假肢成功利用拇指和食指完成了抓取针头动作[图12(B)和(C)]. 但由81 mm2柔性电极采集信号驱动的假肢由于受到肌肉串扰的干扰,中指和无名指仍发生了5°~10°的弯曲[图12(F)和(G)];令人兴奋的是,9 mm2柔性电极将肌肉串扰现象最大化减弱,由该电极驱动的假肢中指和无名指保持静止[图12(H)和(I)],精确地重复了志愿者抓取针头的动作 [图12(C)],展现了该界面在智能假肢的精密控制领域的巨大应用前景.
在手术中利用EMG 进行神经电生理监测,对异常情况发出预警,能够帮助术者及时调整手术操作,避免神经损伤等情况. 血管减压术(MVD)是治疗面肌痉挛的常用手段,但单纯的MVD术后病情复发率较高,易出现并发症[84]. 在人机交互领域,残疾人士截肢后残余肌肉有限,无法产生足够的肌电信号进行智能假肢的精准控制. 为解决这些问题,Marasso 等[85]提出了目标肌肉神经分布重建技术(TMR),以帮助残疾人士建立完整的肌电信号. 该技术的研究需要建立大鼠模型,将肌电电极植入大鼠体内,通过低频电刺激研究神经移植后的疗效,其中可植入的肌电电极扮演着不可或缺的角色. 因此,开展可植入电极的研究开发具有重大实用价值. Yan 等[86]通过缩聚的超分子聚合物材料制备了400%拉伸应变的金纳米薄膜电极,聚合物基底与金纳米薄膜之间良好的界面黏合性将基底的高拉伸性、断裂缺口不敏感性及自修复性等优良特性都成功传递给了金膜. 研究人员采用三电极系统对志愿者肱二头肌收缩过程进行肌电监测[图13(A)],将可拉伸电极作为工作电极应用于志愿者上臂前侧,并在手背处放置参考电极,实现了典型肌电信号的成功监测[图13(B)],信噪比与以PDMS为基底的金纳米薄膜电极相当,并通过能谱分析验证了信号的准确性[图13(C)];他们随后将可拉伸电极植入活体大鼠体内肱四头肌处,并利用导线在大鼠皮下将电极与固定在大鼠头骨上的连接器连接,成功建立了大鼠模型[图13(D)],大鼠恢复后将其放置在跑步机上,诱导大鼠肱四头肌收缩并进行实时肌电信号记录,在20 kHz的采样频率下获得了稳定准确的皮下肌电信号[图13(E)],并得到了清晰的对应频谱数据[图13(F)],验证了该可拉伸电极测量体内和体外EMG的实际效用.

Fig.13 High⁃adhesion property of the electrode and on⁃skin and in vivo EMG detection[86]
通过采集患者咬肌和颞肌等咀嚼肌的肌电信号获得可靠的咀嚼肌功能活动参数,能够帮助临床相关口腔颌面部畸形的诊疗和矫正. 但成年男子颌面部皮肤通常分布密集的胡茬和头发,阻碍电极与皮肤的接触;此外,毛发生长对电极产生的反推动力也会破坏电极与皮肤间的接触. Ferrari等[87]通过喷墨打印技术开发了一种基于导电聚合物的人机交互界面,小于1 μm的超薄厚度使电极能够完美地贴敷在皮肤表面,并且在不影响信号质量和稳定性的前提下,毛发可穿过电极生长. 他们将该人机交互界面贴敷于经过剃须处理的志愿者面部,在剃须3 h后首次记录了志愿者的面部肌电信号,随后每隔一定时间记录一次信号,整个过程长达24 h,在面部胡茬持续生长的情况下获得了稳定、高质量的肌电信号. 该人机交互界面解决了商业凝胶电极无法在毛发密集部位进行长期生理监测的问题,可作为商业凝胶电极的代替品应用于临床医学领域.
2.3 高动态稳定人机交互界面在脑电监测上的应用
脑电信号(EEG)能够实时反映生物体思维活动状态的变化,在睡眠监测、认知控制、人工智能(如脑控轮椅、无人驾驶汽车等)等新兴领域具有广泛应用. 但脑电信号幅度通常十分微弱,极易受到外界环境及个体因素的干扰,且头皮被密集的头发覆盖,使脑电信号的采集更具挑战性. 因此,如何保证信号的准确性和稳定性,对脑电信号的采集设备提出了较高的要求. Stauffer等[81]利用添加导电银纳米颗粒的导电聚合物制备了具有大直径微柱结构的可拉伸人机交互界面,该界面能够穿过浓密的头发应用于头皮进行高质量的EEG监测,避免剃发等繁琐的皮肤准备. 研究人员按照国际通行的10~20系统将临床标准电极和柔性微柱电极分别放置于O1和O2处,并在耳垂处分别放置金杯电极作为参比和偏置电极,对受试者闭眼放松状态及睁眼过程中枕叶位置的α脑电波进行了实时采集(枕叶是大脑皮层的视觉处理中心). 结果表明,受试者在闭眼放松状态下枕叶位置出现大量α波,标准电极和柔性微柱电极的脑电波形图和PSD特征曲线展现出一致的走势,且显示出10 Hz的典型α波[图14(A)]. 他们进一步将标准电极与微柱电极分别放置于FP1和FP2处,监测受试者闭眼状态的额叶位置脑电波(额叶负责语言、视觉及听觉等信息的处理). 结果表明,额叶部位α波波幅较小但仍清晰可见[图14(B)]. 当受试者睁眼时,α波随即消失,同时观察到睁眼对信号造成的伪影[图14(C)]. 整个过程中柔性微柱电极获得了符合临床标准的脑电信号,展现出极佳的电极性能,且在1 h的信号采集过程中,受试者没有任何头皮不适反应. 该人机交互界面的柔性可拉伸性质及特殊的微柱结构使其在高质量的EEG 监测上具有显著优势,可利用脑电波特性开发瑜伽辅助产品、监测疲劳状态等.

Fig.14 Proof⁃of⁃principle EEG measurements using soft pillar electrodes[81]
在EEG基础上发展起来的事件相关电位(ERP)是个体接受触觉、听觉或触觉刺激时产生的特殊脑诱发电位,能够反映人认知过程中大脑的神经电生理变化,又被称为“认知电位”,其中P3作为ERP中内源性(心理性)成分,反映受试者的注意力和精神状态,在自闭症、老年痴呆症及抑郁症等疾病的早期诊断上具有潜在应用前景. 但目前脑电采集电极尺寸大多仅为几平方厘米,只能在小范围区域内进行脑电信号的空间制图[88,89]. Tian等[90]报道了一种超大面积、多功能且MRI兼容的人机交互界面,扩大了信号采集电极的规模,使其能够进行身体规模的电生理记录. 通过将金属网电极与聚丙烯酸酯导电凝胶层结合,进一步改善了电极拉伸性,降低了界面阻抗. 他们按照国际10~20系统,在年龄28岁的志愿者头部E1和E2处佩戴该皮肤电极,同时在Fz,Cz,Pz和Oz处放置常规金杯电极作为对比,对志愿者进行了为期5 d的oldball测试,并记录听觉事件相关电位. 结果表明,该皮肤电极可在志愿者正常日常活动(淋浴、锻炼、工作、睡觉等)情况下进行高质量、稳定的EEG 监测;而商业凝胶电极因易干燥失水,需每天在记录信号前后进行安装和移除. 选取E1、E2和Pz3处位置接近的电极第一天采集的结果进行对比,结果显示该皮肤电极性能与商业凝胶电极相当,通过总结E1处皮肤电极5 d内的P3波形及5 d内各电极记录的P3幅值统计和信噪比,可以看出该皮肤电极出色的脑电数据记录能力及长期稳定EEG监测的应用潜力;此外,他们还在志愿者头部固定了4个脑电阵列(68个电极)以覆盖整个头皮范围,发现靶刺激和非靶刺激在250~450 ms间P3幅值的空间制图显示的信号分布情况与预期一致,最大波峰出现在大脑顶叶位置,并总结了h,i,j和k不同位置的P3波形,进一步验证了监测结果与预期信号分布一致,证明了该皮肤电极大范围监测大脑活动的能力,展现了其在医疗保健(如癫痫持续状态的临床诊断和监测睡眠状态等)、健康科学研究及情感-认知互动等方面的应用前景.
3 总结与展望
随着柔性电子器件的迅速发展,如何通过设计开发高黏附可拉伸高分子材料,实现稳定的人机交互界面,保证采集人体信号的精确度和稳定性,激发了研究人员的热情. 通过塑化丝素蛋白、设计仿生结构、引入功能单元、增加交联密度及构建双网络结构等合成方法,国内外研究者开发了一系列具备高黏附性和良好拉伸性的高分子材料,构筑了性能优良的人机交互界面,实现了人机交互界面的动态稳定性;此外,高分子材料赋予人机交互界面的易剥离和亲肤的优良性能,保证了其对人体动态电生理信号的长时间准确监测,在医疗保健(如长期监测ECG用于心血管疾病的早期诊断,通过ERP对老年痴呆、抑郁症进行诊断)、运动监测(如游泳过程中ECG 实时监测心率)、智能控制(如通过采集EMG智能控制假肢)等领域有着广阔的应用前景.
尽管高动态稳定人机交互界面的研究已得到了迅速发展,然而未来智能人机交互界面在材料制备和应用方面仍面临如下挑战:(1)如何实现高黏附可拉伸高分子材料的工业化,衡量制备,推动人机交互界面的商业化应用;(2)如何制备透气透水的高分子复合材料,实现人机交互界面的可呼吸性,提高使用者的舒适度;(3)多数自黏附材料的黏附性是一次性的,或随使用次数增加黏附性降低,如何制备具有稳定黏附性的高分子材料,保证人机交互界面的多次重复使用;(4)如何制备与阵列化柔性制备技术相兼容的高分子材料,实现阵列化人机交互界面的快速、低成本构建,实现各种电生理信号的同时监测等. 开发新型高黏附可拉伸高分子材料,构建高性能的人机交互界面,是下一代柔性电子器件蓬勃发展的基础. 通过与人工智能和互联网技术有机结合,构建同时集成心率、血压、体温、人体电生理信号、体液检测等多种功能的智能柔性健康监测系统,能够为人们提供一个实时动态的生理健康状态图像,这将打破传统医疗的局限,推动传统医疗向数字医疗转变,为2030健康中国行动添砖加瓦.