触觉互联网应用场景浅析
2021-04-17朱应钊
朱应钊
(中国电信股份有限公司研究院,广州 510630)
0 引言
互联网技术日新月异,继固定互联网、移动互联网、物联网之后,触觉互联网又被提出来。最初的固定互联网可以简单理解为将计算机网络相互连接起来。后来,由于互联网的移动性严重受限,人们使用互联网服务很不方便,则移动通信网和固定互联网相互融合形成移动互联网[1]。慢慢地,仅人与人之间的连接交流已经无法满足人们的需求,能实现人与物、物与物连接交互的物联网技术备受关注[2]。为了能实现更高层次的远程连接和传递触觉,且能保证低延迟、高可靠、高连接密度、高安全性的通信条件,世界各地众多科研人员对触觉互联网也展开了深入研究,触觉互联网是未来重要的基础网络设施,具有广阔的应用前景。
1 触觉互联网概述
早在2014年,Fettweis已提出触觉互联网[3],当时他将触觉互联网定义为要求往返时延极低,通过互联网控制和操纵真实或虚拟物体的使能技术。
触觉互联网让远程触觉传递成为可能(见图1)。由于触觉是一种抽象的感官数据,需要通过传感器进行采集,其中可捕获的触觉数据包括压感、接触点位置、温度、湿度等。触觉数据要进一步编码成计算机可识别的二进制形式才可以经由触觉网络往远处传递。远端从触觉网络接收相应的数据,再将数据解码成原来的形式,并借助传感器实现让远程人员感受到触觉。
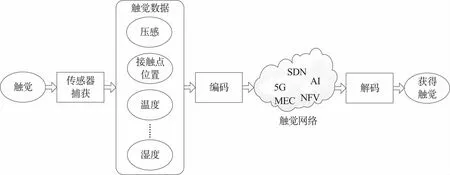
图1 远程触觉传递
Ateya[4]提出一种新的基于多层云的蜂窝系统设计方法以支持触觉互联网应用。该方法设计了4层云结构:第一级是微云(Micro-Clouds),即一个小型数据中心,移动网络中的每个小区都有一个连接到其基站的微云;第二级是小型云(Mini-Clouds),由更大的数据中心组成,负责管理自己组内的微云单元,以及完成微云单元不能执行的任务;第三级是核心网络云(Core Network Cloud),有着更高的处理能力和存储能力,负责控制网络内所有的小型云,也作为进入互联网前的网关;第四级是远程公共云,这些远程大数据中心即为最后的层次。Hamzeh[5]提出一种光纤无线增强型LTE-A异构网络架构,充分考虑了时分复用与波分复用。Neaime[6]提出一种光云分布网络(Optical Cloud Distribution Network,OCLDN)架构,采用一种新的动态波长和带宽分配方案,以指定上行波长的方式达到触觉服务的QoS要求,且可以实现信道间统计复用。为此,能在保证触觉服务QoS要求下最大化网络吞吐量服务。IEEE P1918.1标准工作组成立于2016年3月,旨在定义触觉互联网框架的参考架构。IEEE P1918.1架构于2019年问世,该架构主体由两部分组成,分别为触觉边缘与网络域,遵循控制与数据分离、模块化等设计原则[7]。
2 触觉互联网应用场景
触觉互联网让远程传递触觉成为可能,在人机交互的智能空间中新增触觉反馈,且能保证人与机器在超低延时、极高可靠性及超强安全性的条件下实现视觉、听觉、触觉等感官信息的互动。触觉互联网作为一种具备“里程碑”意义的创新技术,可赋能医疗、计算机图形学、人工智能和教育等领域,拓展出更多的应用场景。本文将深入探讨触觉互联网在远程手术、虚拟现实与增强现实、自动驾驶、电子商务、教育培训及情感交流等场景上的应用。
2.1 远程手术与远程诊断
远程手术在很大程度上突破了医生所在地的限制,有助于患者随时随地享受优质的医疗服务。尤其是对于部分偏远地区,当地诊所或医院可能会缺乏某些科室的专家医生;甚至有时候某些患者的病情很紧急,根本不够时间送往远距离医院去治疗等,这些情况对远程手术的需求都十分迫切。“达芬奇”手术系统是其中一个应用较广泛的机器人手术系统,该系统由外科医生控制台、机械臂、摄像臂及手术器械构成的手术台与成像平台组成[8]。虽然“达芬奇”手术系统可以放大20倍三维成像,让整个微创手术过程变得更清晰,且精确性更高,但“达芬奇”手术系统仅能反馈视觉信息给医生。面对这样的情况,在控制台操作的医生只可以依据视觉信息判断器械对组织的作用力或其他特性[9],这无疑提高了手术的不确定性,甚至存在一定的手术风险。为此,现有手术机器人的不足除了成本极高之外,还无法实现触觉反馈,医生无法在控制台上感受到手术过程中的手感,可能会导致某些手术操作存在细微的偏差。而触觉互联网可以解决该问题,实现对触觉反馈的有效传送,且触觉互联网有着超低延时的特性,医生可以在很远的地方操控控制台进行远程手术,打破了距离的限制,让更多医疗资源能作用到以前无法覆盖的末梢地区。基于触觉互联网的远程手术,医生可在控制台处操作和接收实时听觉、视觉和触觉反馈。而患者处的手术机器人根据远程医生发来的指令执行对应动作,并实时生成听觉、视觉和触觉反馈。Meryem[10]和Adnan[11]都提出了基于边缘的体系结构用于远程手术的触觉互联网系统。
触觉互联网对远程诊断也会有很大的帮助。我国的中医讲究“望、闻、问、切”,其中“切”是指摸脉象,摸脉象就需要将病人脉搏的快慢、强弱、深浅等触觉信息反馈给中医师。另外,不论中医还是西医,对于部分疾病,医生需要对病人的特定部位摸一摸、按一按来综合其他因素进行简单判断是否患病。例如,针对某些癌症患者,通过摸可以感受到肿瘤的硬块。触觉互联网可以将诊断过程中的一系列触觉反馈给医生,有助于提高医生诊断的准确性。除了远程手术和远程诊断,触觉互联网还能用于医疗保健领域中的远程康复、远程超声检查等众多场景。
2.2 虚拟现实与增强现实
虚拟现实(Virtual Reality,VR)可以被理解为是一种可以模拟现实环境、创建沉浸式虚拟世界的计算机仿真技术[12]。虚拟现实技术其中一个特征是沉浸性,即希望让用户在三维虚拟空间中获得视觉、听觉和触觉等多器官沉浸式感受,真正融入到虚拟环境里,而无法判断自身是否已经离开了所处的外部环境[13]。为此,在VR中实现触觉传递是提高真实感的重要举措之一。通过触觉互联网,基于虚拟现实技术,可实现一个共享的触觉虚拟环境。多个用户通过模拟工具进行物理耦合,感受视、听及触觉反馈,有序协作和执行任务[10]。触觉互联网有助于VR提供更优质的体验。
增强现实(Augmented Reality,AR)实现将虚拟信息有机叠加于真实世界中,让它们能够在同一时间、同一空间里呈现。现有AR技术在人机交互方面一般都是通过操作键盘或鼠标,这样交互方式的体验感不好。相比之下,若用户直接戴上可穿戴设备或徒手交互即可感受到相应的触觉反馈,增强现实人机交互体验感会更好。触觉互联网应用于增强现实中,不仅能实现触觉的传递,更能实现动态内容和最新信息的可视化,会给人们在很多工作上都带来便利,例如设计师在虚拟空间中操作3D模型的精确性变得更好、真实感变得更强;针对流水线上复杂的装配任务,在当前部件需要放置的位置上生成部件的虚拟影像,且当工人将该部件装配有偏差时,也会感受到对应的触觉反馈。
2.3 自动驾驶
国际汽车工程师协会(Society of Automotive Engineers,SAE)将自动驾驶分为6个等级[14],分别是L0~L5(见表1)。虽然L4高度自动驾驶和L5完全自动驾驶还难以实现,但L2部分自动驾驶和L3条件自动驾驶很快就可以商用了。L3的周边监控都是由系统完成,触觉互联网有助于车辆形成更完备的感应系统,提高对视、听、触觉等信息感应,以及车辆之间的协同。另外,面对部分复杂情况或突发恶劣状况,L2和L3需要驾驶员来接管。如果驾驶员一直呆在车上等待接管,会造成资源的极大浪费。为此,L2和L3的接管可以通过触觉互联网实现由远处驾驶员进行远程接管。触觉互联网实时为远程的驾驶员反馈踏板、方向盘、背部、臀部等触感及视听觉信息,远程驾驶员更能理解当前的驾驶状况,及时做出应对驾驶动作,有效接管车辆,保证车辆行驶安全。
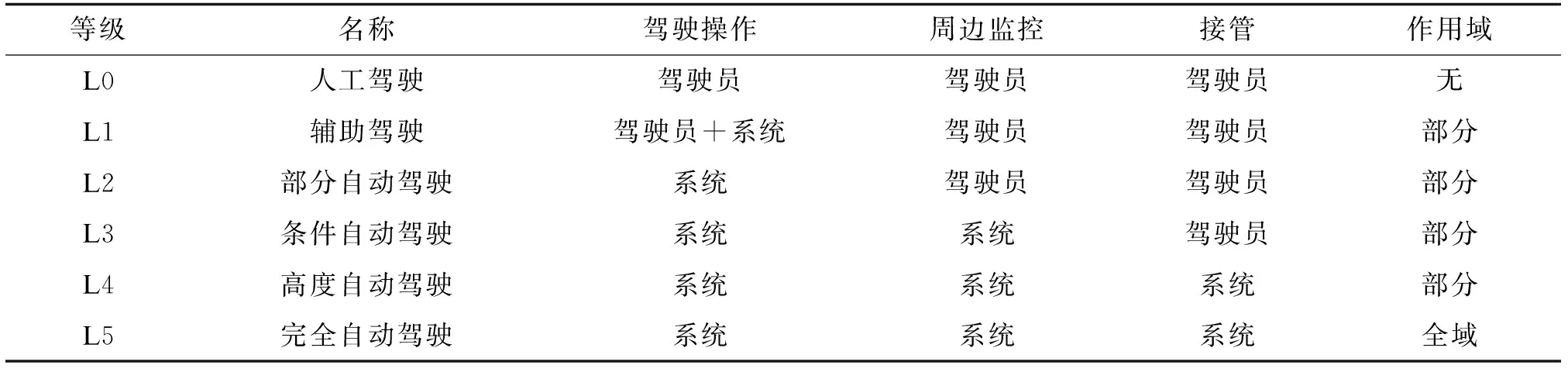
表1 自动驾驶分级
2.4 电子商务
目前,网上商城、直播带货等电子商务异常火爆。在这些电子商务营销的过程中,消费者仅获得视觉和听觉上的感知,无法感受到商品的触感,但往往触感有助于激发消费者冲动性购买的意愿[15]。触觉感知是促进营销的重要法宝之一,能传达出正式语言无法传递的意义和内容,从而加强企业与消费者之间的互动[16]。另外,消费者经常在收到货物后由于对其质地不满意要求退货、退款,买家或卖家还得亏掉退货邮寄的运费或运费险。出现这样的退货问题通常是因为消费者在网上买之前没有体验到商品的质地、纹理等触觉特性,导致真正摸到的实物与网上看到的出现很大偏差。未来可以考虑将商品的触觉特性编码成对应的触觉数据,跟其他视频、音频数据类似,可存储于网站服务器上。消费者通过触觉互联网查看该商品时,一系列数据实时发送到他的设备上,并以虚拟影像模型的方式呈现于消费者面前,满足消费者多感官购物体验。
2.5 教育培训
触觉对于教育培训也是比较重要的,尤其是对于乐器、绘画、书法等兴趣技能学习。一般都是以现场授课的方式进行,因为现场授课时,如弹钢琴,老师可以指点触控按键学习,学生的学习效果会比较好。若通过触觉互联网,老师和学生不再需要聚集在同一个地方,学生的按击效果经过触觉传感器和触觉互联网实时传递到远程老师的设备上,同理,学生也可以实时感受到远程老师的正确指法按击,即手指击键的触感和每个音的起止时间。触觉互联网让各类技能性远程学习、培训变得十分便利,不再受地域限制。
2.6 情感交流
对于留守儿童、空巢老人或是异地的恋人等,沟通、交流、陪伴往往是他们最希望的。由于工作、读书等因素,人们难以长时间聚在一起,更多是通过远程视频这种方式见面、谈心。人们通过远程视频能看到画面和听到声音,可现有远程视频的交流方式与面对面交流相比,还是缺乏“温度”的。借助触觉互联网,人们在远程视频时,不仅能看到对方的样子、听到对方的声音,还能感受到对方肌肤的触感、身上的温度。打破距离的界限,人们远程之间也能享受到握手、拥抱、搭肩等动作的喜悦。基于触觉互联网实现的远程视频情感交流可以变得更为真实、温馨,而不再是仅仅对着一个冷冰冰的终端屏幕。
3 结束语
触觉互联网是互联网技术的又一次演进,蕴藏着巨大的商业价值,但目前要实现触觉互联网仍面临众多挑战。在触觉互联网中,有视觉、听觉及触觉等多模态感官信息,这些不同模式的信息在采样频率与传输速率等方面存在差异,跨模态异步是一个亟待解决的问题,需要设计出一套高效的多路复用方案。目前,大多数的研究是在传输层或应用层进行。基于传输层的方案是针对TCP或UDP协议进行开发[17],而基于应用层的方案更偏向有效编码和自适应统计复用[18]。未来,为了提高复用性能和适应无线环境,可以往跨不同协议层的方向继续探索多路复用方案。
触觉互联网的通信问题是个极具考验的挑战。触觉互联网需要具备超低延时、极高可靠性等特点。尤其是对于远程手术和自动驾驶等场景,要求时延小于10 ms,且触觉互联网最终时延目标更是达到1 ms。另外,不同的应用场景对通信可靠性的要求也不同。未来,需要继续探索采用5G或6G、软件定义网络[19](Software Defined Network,SDN)、边缘计算、网络功能虚拟化(Network Functions Virtualization,NFV)、人工智能等技术能否满足触觉互联网的通信要求。6G相比于5G,在实现海量数据高速、无延迟、安全可靠分发等方面更为先进[20]。SDN技术有助于实现数据平面和控制平面分离[21],而NFV技术有助于实现软硬解耦和功能抽象。边缘计算可加速内容、服务和应用程序,提高边缘的响应能力。人工智能技术可协助预判错误操作,减少延迟和丢包对触觉控制不稳定性的影响[22]。
在触觉互联网上,可传递的感官信息更多,需要防护的用户数据也就变得更多。触觉互联网开拓的一些新的应用场景对数据安全的系数要求极高,一旦部分数据受到破坏,可能会带来严重性灾难。未来,可以运用区块链等创新技术为触觉互联网的网络安全保驾护航。