基于滑模变结构的转向控制器优化设计及研究
2021-04-16裴学杰
裴学杰
(陕西国防工业职业技术学院汽车工程学院,陕西 西安 710036)
科学技术的飞速进步使目前汽车的转向系统更加便捷、可靠,尤其是乘用车市场已摒弃原有的机械转向系统和液压助力转向系统等传统转向系统,转而采用电动助力转向系统(electric power steering,EPS)[1]。电动助力转向系统的核心是转向控制器的控制策略和控制模式。本文采用的滑模变结构控制策略,经过多年的发展已成为自动控制系统中一种常用的设计方法,它适用的控制任务有镇定与运动跟踪等。滑模控制策略与其他控制策略的不同之处在于系统的“结构”并不固定,使得系统能够按照预定“滑动模态”的状态轨迹运动[2]。本文在Simulink中创建转向控制器模型,分别使用传统PID控制和滑模变结构控制策略,再联合Carsim中整车模型,对比在动态仿真模拟情况下的各类曲线[3],以期找到提高转向控制系统动态特性的方法。
1 Simulink中转向器仿真参数设置
为了降低问题的复杂性,本文忽略了非线性因素对系统的影响,将扭矩传感器简化成刚度为Kc的扭力杆。在假设前轮处于小转角的情况下(即轮胎侧偏角小于5°,轮胎特性可认为是线性的),转向阻力可认为与转向齿条位移成正比,此时等效比例系数为弹簧刚度Kr。最后将复杂的电动助力转向系统简化为方向盘和上转向轴、下转向轴、电动机与齿轮齿条4个部分[3],具体参数设置见表1。
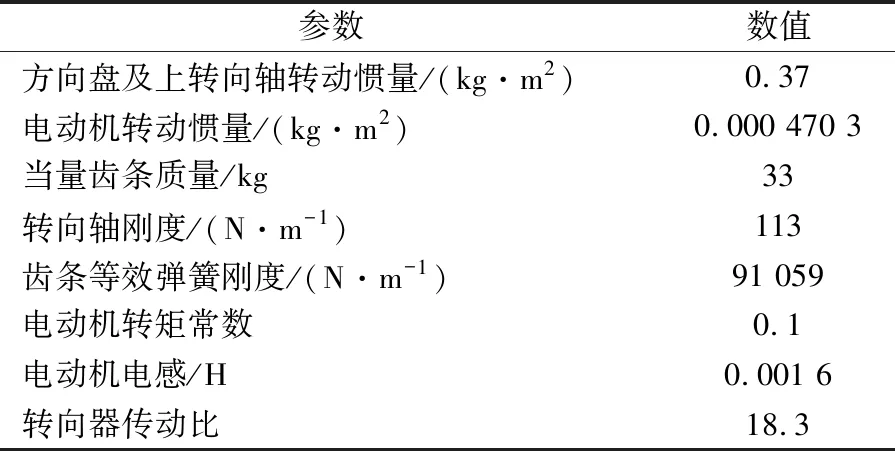
表1 Simulink中仿真参数设置
2 传统PID控制器设计
本文通过在电动机驱动模块处安装一个电流传感器来测定电动机的实际电流值I,并将该值反馈到PID控制器,从而对目标电流Im进行闭环跟踪,实现对电动机电流的控制。PID的控制规律函数表达式为:
(1)
式中:U为PID控制器的控制输出信号;KP为比例系数;TI为微分时间常数;TD为积分时间常数;t为时间。
根据式(1)可建立如图1所示的传统PID控制器Simulink仿真模型。
图1中,输入目标电流与实际电流的误差e,经过PID控制器得到电机控制信号U。Saturation模块是为了防止过大的电压产生。其中,比例系数KP的值为2、积分系数KI的值为15、微分KD的值为0.001。
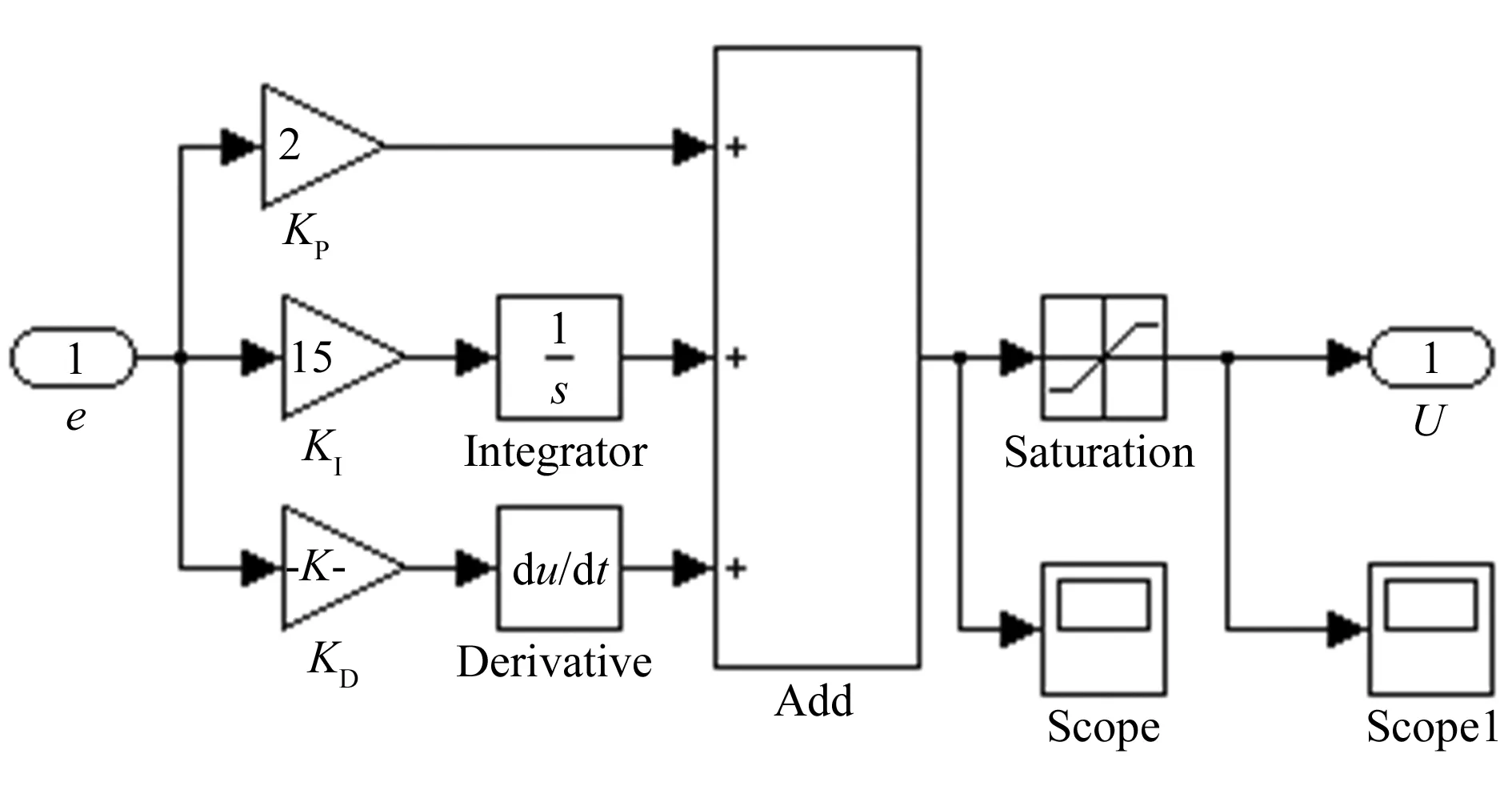
图1 传统PID控制器Simulink仿真模型
3 滑模变结构控制器设计
为实现对目标电流的跟踪控制,取切换函数s为电流误差e:
s=e=r-i=r-Cx
(2)
式中:r为电机目标助力电流;i为电机实际电流;x为切换函数自变量;C为控制常数。
指数趋近律是趋近效果比较好的一种趋近律[4]。在趋近过程中,指数趋近律的趋近速度是持续变化的,在到达切换线(或面)前,速度较快,缩短了趋近时间;在到达切换线(或面)时,速度较慢,在一定程度上削弱了“抖振”现象。因此,本文采用指数趋近律的控制方式,其趋近律slaw为:

(3)
式中:ε和k为近律系数,ε>0,k>0。本文取k=30,ε=5。为求控制器输出量u,对式(2)求导,得:
(4)

由式(4)可推导出u:
(5)
根据式(5)可建立滑模控制(sliding mode control,SMC)器的Simulink仿真模型,如图2所示。其中输入信号是目标电流Im、实际电流I和下端转向轴的转速Be。Signal Constraint模块可以在信号理想位置的范围内自动调整得到最佳控制参数值,以达到理想控制效果[5]。滑模变结构有3个控制常数——L,R,C,它们的值分别为0.001 5,27.980 4,12.520 6。
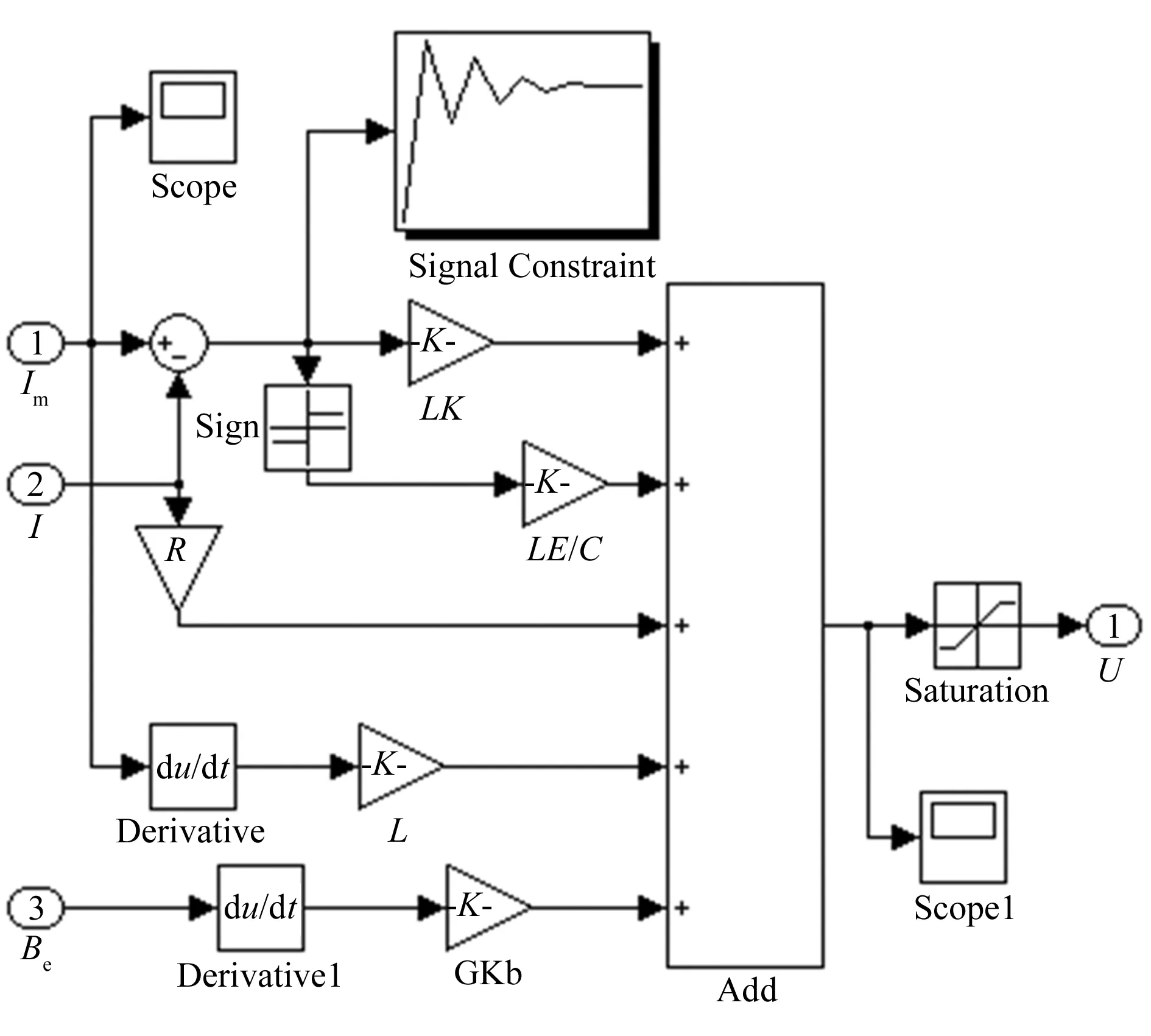
图2 滑膜控制器Simulink仿真模型
4 CarSim整车模型建立
CarSim软件将车辆模型进行抽象简化后,共分成了七大子系统进行参数设定,包括发动机(最大功率220 kW,通过节气门开度进行直接控制)、制动系统(前盘后鼓且带有ABS防抱死系统的典型制动系统)、传动系统(6速自动变速器,主减速比为2.5)、转向系统(传动比为0.95和13)、悬架系统(独立悬架系统)、轮胎(轮胎规格为235/60 R17)和整车车体(高度为1 880 mm、长度4 900 mm和宽度1 750 mm,质量为1 760 kg)。然后依据车辆多体动力学特性和设定的初始条件进行求解运算,最后进行响应仿真。
将CarSim整车模型建立完成并验证后,将整车模块添加进Simulink模型中,链接整车模型和控制器模型进行联合仿真,如图3所示。
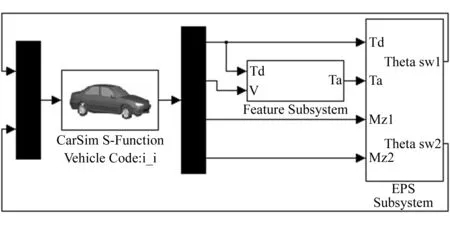
图3 CarSim与Simulink联合仿真模型
5 转向响应仿真结果分析
为了明确验证控制器的可靠性,参照GB/T 6323—1994《汽车操纵稳定性试验方法》,采用未安装EPS控制模型、传统PID控制模型与本文设计的滑模控制模型进行转向仿真试验。
1)转向盘转角为0~180°,输入时间为1 s,选取车速80 km/h,连接后在CarSim中运行,所得试验结果曲线如图4所示。
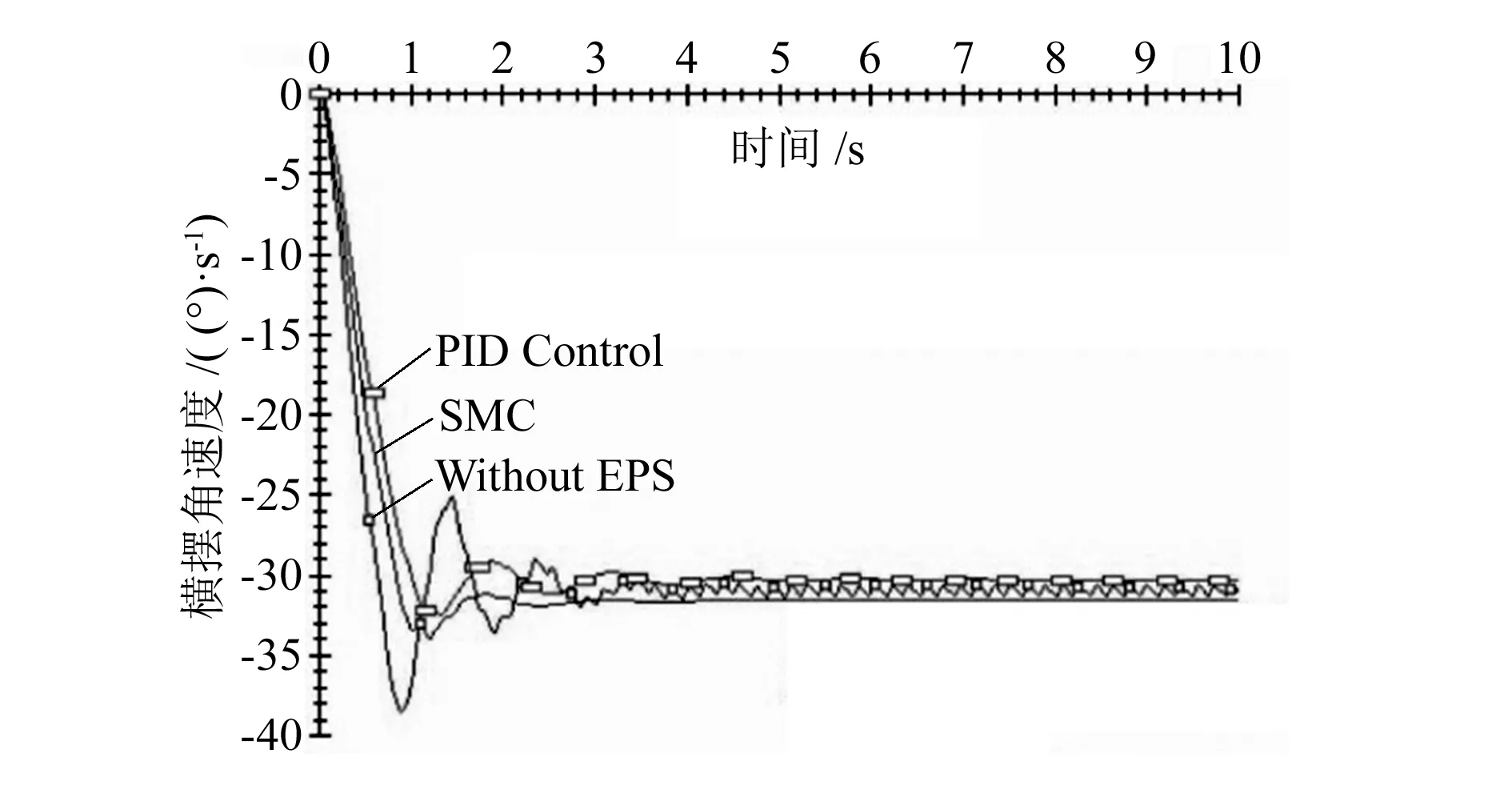
图4 汽车横摆角速度随时间变化曲线图
2)对转向盘做三角脉冲输入,车速和时间等参数与1)中工况相同。仿真试验结果如图5、图6所示。
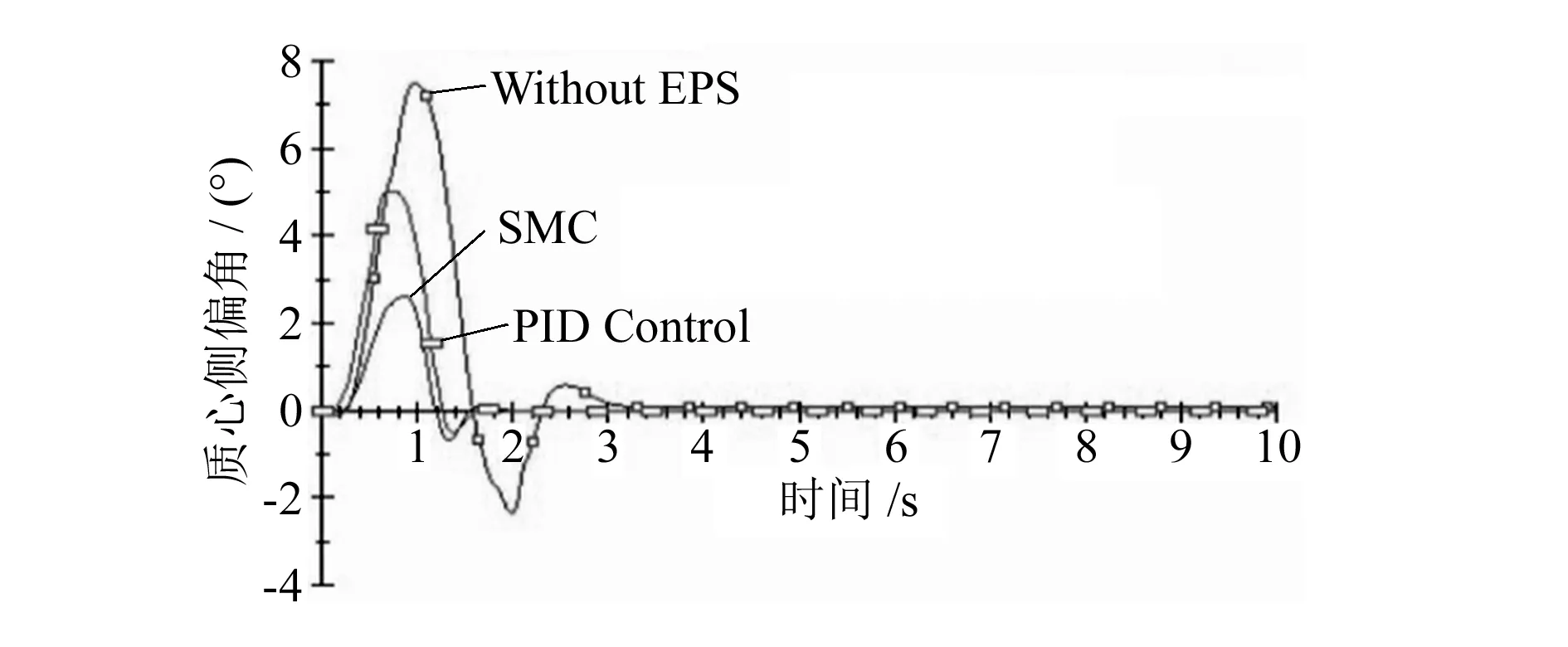
图5 汽车质心侧偏角随时间变化曲线图
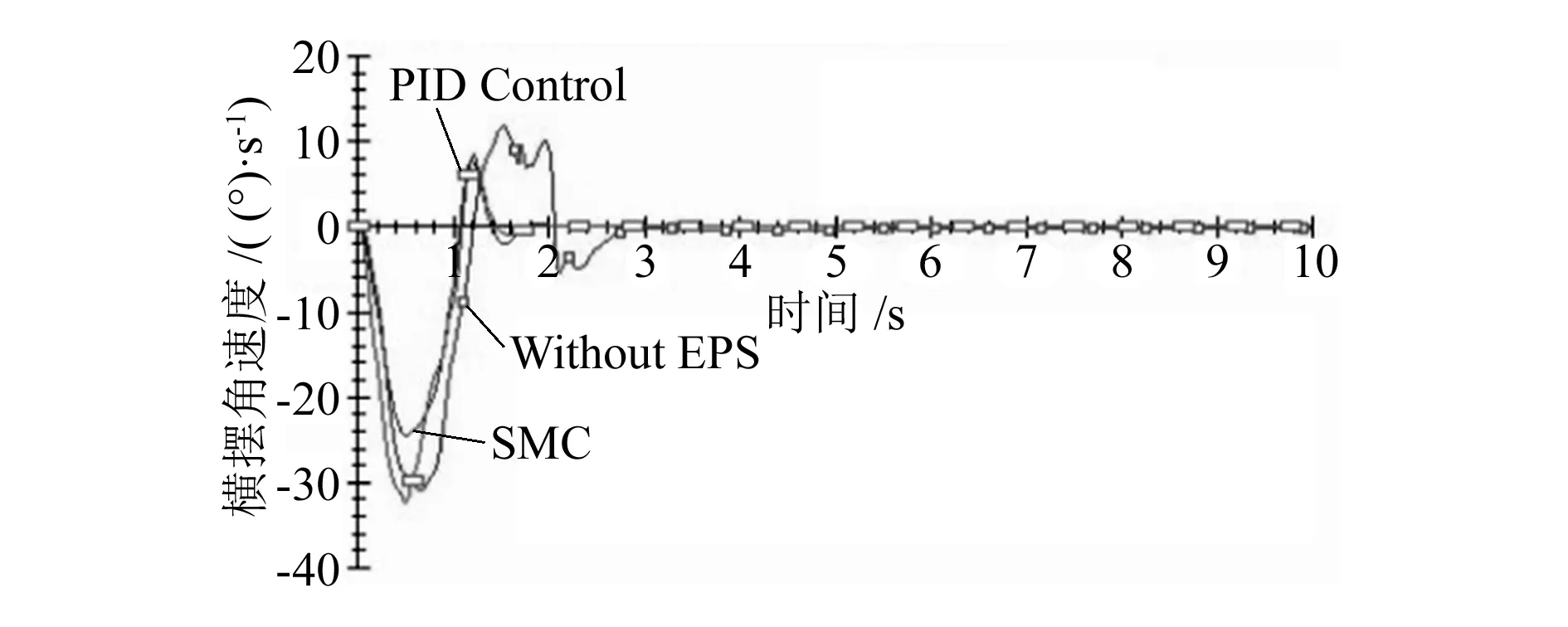
图6 汽车横摆角速度随时间变化曲线图(三角脉冲信号)
从图5、图6可以看出,当驾驶员输入三角脉冲信号后,质心侧偏角和横摆角速度由高到低区分明显,依次是未安装EPS模型、PID控制模型和滑模控制模型,充分说明安装滑模控制器对车辆(模型)的操纵稳定性和回正特性有着很明显的改善作用。PID电流控制器的优点是算法简单、成本较低,多用于中低端车型上。而滑模变结构控制器相比主流控制器有更好的瞬时响应性和精确性,多运用于高端车型。
6 结束语
本文基于滑模变结构控制原理设计了滑模控制器,采用CarSim整车模型和Simulink控制器模型联合仿真,主要从理论方面对比了未安装EPS控制器、传统PID控制器和滑模控制器在汽车转向时质心侧偏角和横摆角速度的瞬时响应性和稳定性。结果表明,本文所设计的滑模控制器对车辆的回正特性有一定的改善作用,可提高15%操纵稳定性,但本文更偏向理论性研究,缺少一定的试验性数据支撑,下一步工作需继续完善相关理论,增强实用性。
