一种基于GPS信号的车载雷达姿态信息交互方法
2021-04-15熊天武黄宗卫
熊天武,黄宗卫,范 越
(中国船舶重工集团公司第七二三研究所,江苏 扬州 225101)
0 引 言
侦察设备探测距离远,范围广,可以更有效地发现目标;干扰设备功率大,精度高。两者协同工作,可以更灵活、有效地发现目标并实现干扰。侦察干扰一体化设备虽然结构紧凑,且不需要考虑侦察干扰姿态交互问题;但其设计难度大,研制成本高,在无特殊要求时使用侦察与干扰协同工作的方案更具有竞争力。
1 侦察干扰设备协同工作的基本原理
侦察设备以固定转速对目标进行搜索、扫描,将发现的目标姿态信息(方位、俯仰角度以及距离)发送给干扰设备,干扰设备根据侦察设备及自身GPS信息对目标位置姿态信息进行解算,控制伺服机构进行动作,指向目标并进行干扰。传统的搜索雷达天线一般都安装在机械稳定平台上,稳定平台始终稳定于大地坐标[1],侦察设备发送的目标位置可以看作是对应的大地坐标系上的姿态信息,不需要再进行甲板坐标到大地坐标的换算,直接进行位置信息(GPS信号)换算,得到干扰设备所需要的大地坐标系下目标位置的方位、俯仰等姿态信息。侦察及干扰设备的位置及坐标关系如图1所示。
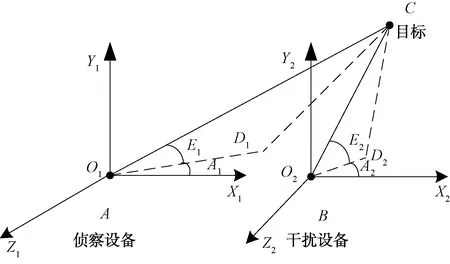
图1 侦察设备目标解算
2 基于GPS信号的姿态信息解算[2-3]
侦察设备、干扰设备的位置分别为A点和B点:A点的GPS信息表示为(LA,MA,HA),B点的GPS信息表示为(LB,MB,HB)。
(1) 根据GPS信息计算A、B点的球心坐标
对于B点的地心坐标:
(1)
式中:NB为B点所处地理位置的卯酉圈曲率半径;HB为B点的高程,HB=H+h,H为B点位置的地面海拔高度,h为B点相对地面的高度;BB为B点所处位置的地理纬度;LB为B点所处位置的地理经度;a为地球椭圆球体的长半轴长度,数值为6 378 137 m;e2=0.006 694 379 901 4,为第一偏心率的平方。
A点的地心坐标位置表示为:
(2)
式中:LA、BA、HA及NR为A点所处地理位置的经纬度、高程及卯酉圈曲率半径。
(2) 球心坐标系-大地直角坐标系转换
以A点为坐标原点,建立大地直角坐标系,计算B点在A点雷达大地测量坐标系内的直角坐标位置可得:
(3)
(3) 目标位置极坐标与大地坐标换算
目标T(XT,YT,ZT)在雷达所在位置(A点)的大地雷达测量坐标系内的直角坐标,方位角AT,俯仰ET,距离LT。
计算目标点位置在大地坐标系上坐标得到:
(4)
(4) 计算目标T点(XT,YT,ZT)在以B点为原点的直角坐标系下坐标为[4-5]:
(5)
(5) 目标直角坐标系与极坐标系转换
根据式(5)计算B点在A点雷达大地测量坐标系内的极坐标位置为:
距离R为:
(6)
俯仰角E为:
(7)
方位角为:
(8)
3 MATLAB仿真与试验
3.1 MATLAB建模仿真
根据理论推导公式(1)~(8)搭建MATLAB/simulink模型进行姿态换算的仿真验证,工作原理模型框图如图2所示。首先将侦察设备及干扰设备的GPS信息转换为球心坐标系下的位置信息,再转换到以侦察设备为原点的直角坐标系下的位置信息,然后将目标位置信息(以侦察设备为原点的极坐标系下的方位、俯仰、距离)转换为直角坐标系上的位置信息(x、y、z),再折算到以干扰设备为原点的大地直角坐标系上,最后转换为极坐标系下相对于干扰设备的方位、俯仰角度。
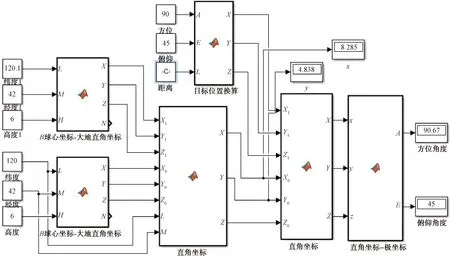
图2 姿态换算
3.2 试验结果及分析
图3为大地直角坐标系下各设备与目标点位置的关系,A为干扰设备位置,B为侦察设备位置,C为目标点位置,C点相对于B点姿态表示为(Azi,Ele,L)(方位,俯仰,距离)。
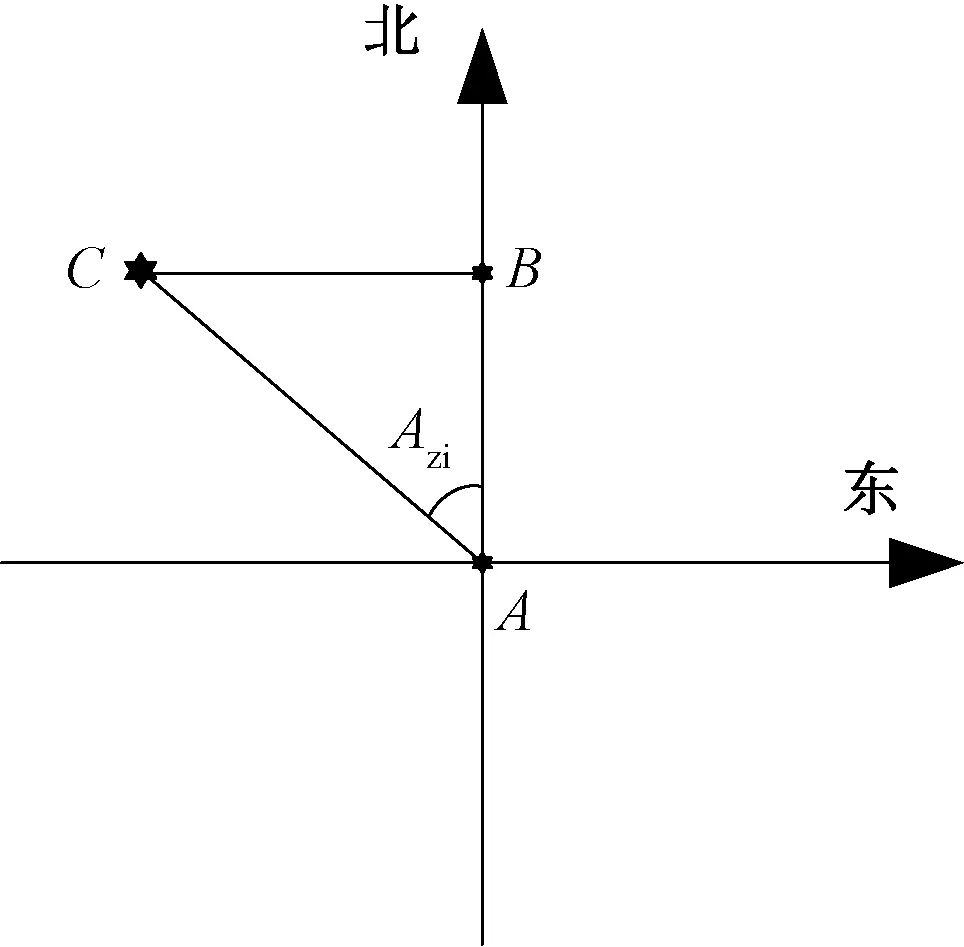
图3 大地直角坐标系下位置关系
现假设干扰设备A的GPS信息为(120°,40°,6 m),侦察设备B的GPS信息为(120°,40.01°,6 m),目标C初始位置姿态信息为(90°,45°,1 000 m),计算可得C点相对于A点的姿态分别为51.72°、31.84°,目标点方位、俯仰角度保持不变,距离逐渐增大到51 000 m,如图4所示,方位角逐渐增大到89.92°,俯仰45°。当目标足够远时,相对于侦察、干扰设备的姿态信息会近似一致,实际解算结果符合理论结果。
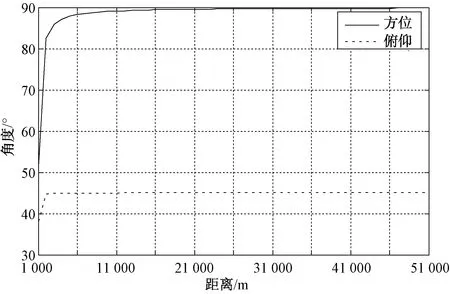
图4 与侦察设备同经度情况下目标点相对于干扰设备姿态信息
保持侦察、干扰设备位置不变,目标初始姿态改为(0°,45°,1 000 m),相对于A点(干扰设备)姿态解算为(0.001 1°,29.21°),保持目标姿态方位、俯仰角度不变,距离逐渐变大到51 000 m,如图5所示,方位角保持不变,俯仰逐渐增大到44.91°。
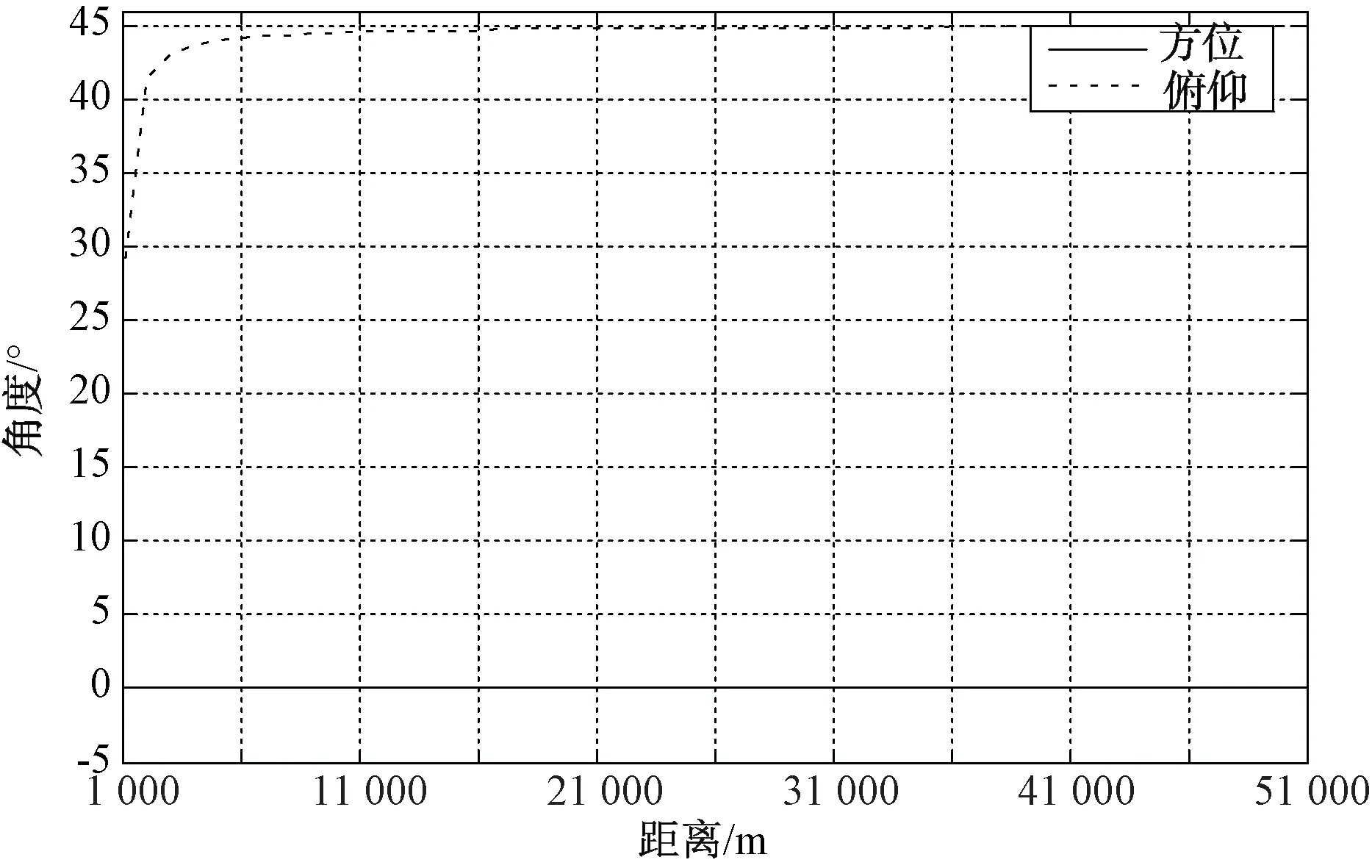
图5 与侦察设备同纬度情况下目标点相对于干扰设备姿态信息
4 结束语
该方法可以实时有效地对目标位置相对于侦察设备及干扰设备的姿态信息进行解算,实时高效地进行目标姿态信息交互,引导伺服机构进行动作,实现侦察、干扰设备的协同工作,提升效率。
