异地配置的雷达与电子支援措施异步航迹关联
2021-04-13杜金鹏曹昕莹
衣 晓, 杜金鹏, 曹昕莹
(海军航空大学, 山东 烟台 264001)
0 引 言
在多传感器[1]目标跟踪系统中,航迹关联[2]是信息融合的前提和基础,作为典型的异类传感器航迹关联,雷达与电子支援措施(electronic support measurements,ESM)航迹关联[3]一直是研究热点。由于ESM可提供的目标信息贫瘠(只提供目标方位角信息),使得关联存在较大难度;而传感器开机时机和采样周期的不同造成的航迹异步进一步增大了关联难度,对算法有效性[4-5]提出了更高要求。
以统计学理论为基础,文献[6]提出一种纯方位航迹关联算法,文献[7]则定义虚定位点,与交叉定位点构造距离统计量进行关联判决。文献[8-9]采用模糊综合理论与统计原理相结合的方法,通过研究目标航迹样本容量不等时的关联问题,分别提出一种适用于航迹量测点数目不同的3阈值、4阈值关联算法,并推导了阈值的解析表达式。结合交叉定位原理,文献[10]根据雷达、ESM和目标位置的几何形状建立关联规则,通过泰勒级数展开累积粗糙相关矩阵信息,建立精细相关矩阵进行关联。为解决雷达与ESM航迹关联门限的不确定性,文献[11]根据雷达与ESM的几何位置建立航迹粗关联函数,并利用航迹的历史信息建立航迹关联代价矩阵,通过代价最小实现航迹关联。
但上述统计类算法的基本假设之一为传感器量测噪声相互独立,且服从高斯分布[12],当目标过于密集,目标间的相互作用不可忽略,噪声分布不满足高斯分布时,上述算法的性能[13]会大幅下降。
针对传感器数据测量误差较大或目标过于密集的问题,将DS证据理论[14]引入航迹关联,文献[15]提出一种将ESM航迹多重分配到多个雷达航迹的算法,使用DS证据理论组合加权身份信息,快速识别组中目标进行关联。文献[16]根据目标密集环境下的关联特点确定隶属度函数,提出基于模糊综合函数的关联算法,利用综合相似度进行航迹关联。文献[17]则采用伪线性滤波方法对ESM目标状态进行估计,修改线性最小均方误差(linear minimum mean square error,LMMSE)融合规则,利用最近邻方法实现雷达与ESM航迹关联。通过将模糊集理论[18]应用于数据关联,文献[19]提出模糊均值算法,以雷达数据为聚类中心,对ESM数据进行模糊处理,使用隶属矩阵分割完成数据关联。
当航迹存在异步[20-21]时,基于最小二乘或滤波插值等原理的传统时域配准算法计算复杂度较高,且滤波误差会随着插值数据点数目的增加快速积累,严重影响算法正确关联率。
为避免时域配准[22]中误差积累的问题,本文定义等长区间序列的离散度作为航迹关联指标;为解决航迹异步问题,分析航迹异步对交叉定位的影响,给出异步区间化和不等长航迹序列等长区间变换的方法。通过仿真验证,新指标区间序列离散度不受噪声分布形式的影响,对ESM异步航迹序列进行的区间化与区间变换能有效降低测量误差对关联结果的影响,实现雷达ESM异步航迹的直接准确关联。
1 问题描述
假设两部传感器s和w(s为2D雷达,w为ESM)对同一批运动目标实施观测。设传感器在公共笛卡尔坐标系中异地配置,且传感器坐标分别记为(xs,ys)和(xw,yw)。
在同一处理周期内,雷达与ESM向融合中心分别上报ms,mw条航迹,上报的航迹集合ζ(k)记为


(1)
2 基于区间序列离散度的航迹关联算法
2.1 异步航迹交叉定位的区间化处理
在二维平面直角坐标系下利用交叉定位原理进行目标定位,若不考虑测量误差,在时域配准的前提下,雷达与ESM的测向线交点即目标真实位置。

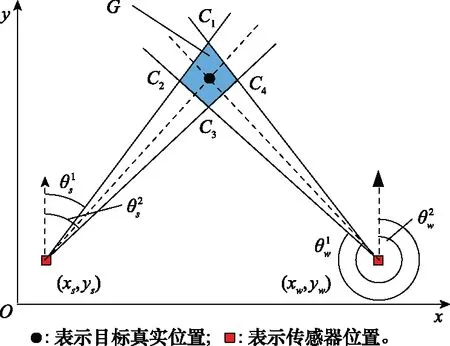
图1 异步航迹交叉定位示意图

(2)


(3)
对异步航迹序列进行上述区间化处理时,要求航迹序列等长,且各临近角度测量值区间具有对应性。故针对传感器采样率不同以及开机时延的问题,需要对航迹序列进行长度统一和临近角度测量值的区间划分。
2.2 不等长航迹序列的等长区间变换
2.2.1 初始无时延时不等采样率情况分析
记雷达采样率为fs,记ESM采样率为fw,定义传感器采样率检测量为κs,w,有
(4)
如图2所示,为方便表述,将雷达和ESM上报的不等长航迹序列简记为X={x1,x2,…,xM}和Y={y1,y2,…,yN},以κs,w=1即M≤N为例,取n=M-1,进行n段划分。
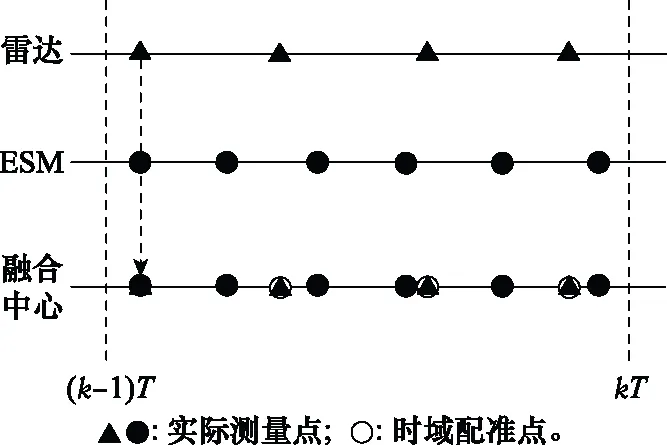
图2 不等长航迹示意图
对长度较短的雷达航迹序列,取相邻测量点两两组合构成区间数据,记为区间变换Γ1,有
(5)
对长度较长的ESM航迹序列,取与各雷达测量点对应时刻前后的临近测量值作为分界点,两两组合构成区间数据,根据取整方式的不同,记向前取整区间变换为Γ2,有
(6)
记向后取整区间变换为Γ3,有
(7)
式中,INTu[x]表示不大于x的最大整数。
2.2.2 等采样率情况下初始时延的影响
在第k个处理周期[(k-1)T,kT]内,雷达和ESM上报至融合中心的航迹起始测量点的时刻分别记为t(x1)、t(y1),定义传感器时延检测量为τs,w,有
(8)
如图3所示,以τs,w=1为例,则在传感器采样率一致的情况下,相较于雷达航迹序列,ESM航迹序列测量点均存在偏后的时延,故对ESM航迹序列进行区间变换时需进行向前取整区间变换,对偏后的时延予以补偿。
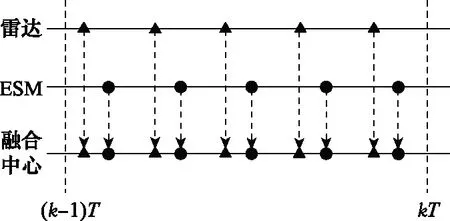
图3 传感器时延示意图
2.2.3 存在初始时延时不等采样率情况分析
由上述分析可知,不等长航迹序列的等长区间变换取决于传感器采样率和初始时延[23],根据采样率检测量κs,w和时延检测量τs,w的不同,可得异步不等长航迹序列的等长区间变换为
(9)
2.3 航迹关联判定

对雷达测量值进行直角坐标转换,得雷达测量值区间序列为
(10)
分别求解航迹序列在各分量上的区间序列离散度,计算平均区间序列离散度
(11)

(12)
由于离散度表征数据的离散程度[24-25],λi j越小说明航迹i,j为同源航迹的可能性越大,故可根据区间序列离散度进行航迹关联判定。
对雷达和ESM传感器上报航迹集合中的航迹两两组合,共有ms×mw种组合方式,分别计算区间序列离散度,利用二维分配法求解航迹关联的全局最优解。
设
(13)
式中,ϑi j=1表示航迹i与航迹j关联;ϑi j=0表示二者不关联。目标函数记为

(14)
则形成二维分配问题
(15)
二维分配问题是在特定的约束条件下求解目标函数最优解,具体可用匈牙利等传统算法进行求解,此处不再赘述。
2.4 三维空间航迹关联
(16)
三维空间下对雷达和ESM测量数据的区间化处理、等长区间变换以及关联判定的方法同第2.1~2.3节。唯一不同的是,求解3D雷达测量值在xOy平面上的投影点坐标时,式(10)变为
(17)
3 仿真验证与分析
3.1 仿真环境
对本文算法进行仿真验证,进行100次Monte Carlo仿真实验,记正确关联概率为Ec=Nc/(Nc+Ne+Ns),错误关联概率为Ee=Ne/(Nc+Ne+Ns),漏关联概率为Es=Ns/(Nc+Ne+Ns),其中Nc,Ne,Ns为实验中正确、错误和漏关联航迹对的数目,且有Ec+Ee+Es=1。
仿真场景设置如下:

随机生成20批匀速直线运动目标,目标初始位置在区域[0 km,100 km]×[0 km,100 km]中均匀分布,初始方向在[0,2π]范围内均匀分布,初始速度服从v0~U(200 m/s,400 m/s)。

随机生成20批匀速直线运动目标,目标在x,y,z方向上的分量速度vx,vy,vz均服从U(0 m/s,200 m/s)的均匀分布,目标初始位置在区域[0 km,100 km]×[0 km,100 km]×[0 km,100 km]中均匀分布。
3.2 算法性能比较与分析
在场景1中改变雷达与ESM的测角随机误差,比较角度测量误差对算法性能的影响。
从表1中可以看出,随着雷达或ESM测角误差的增大,3种关联算法的正确关联率均下降,但本文算法下降幅度小于文献[7,11]算法,受随机测量误差的影响较小。且从整体关联结果而言,本文算法的正确关联概率明显高于文献[7,11]算法。
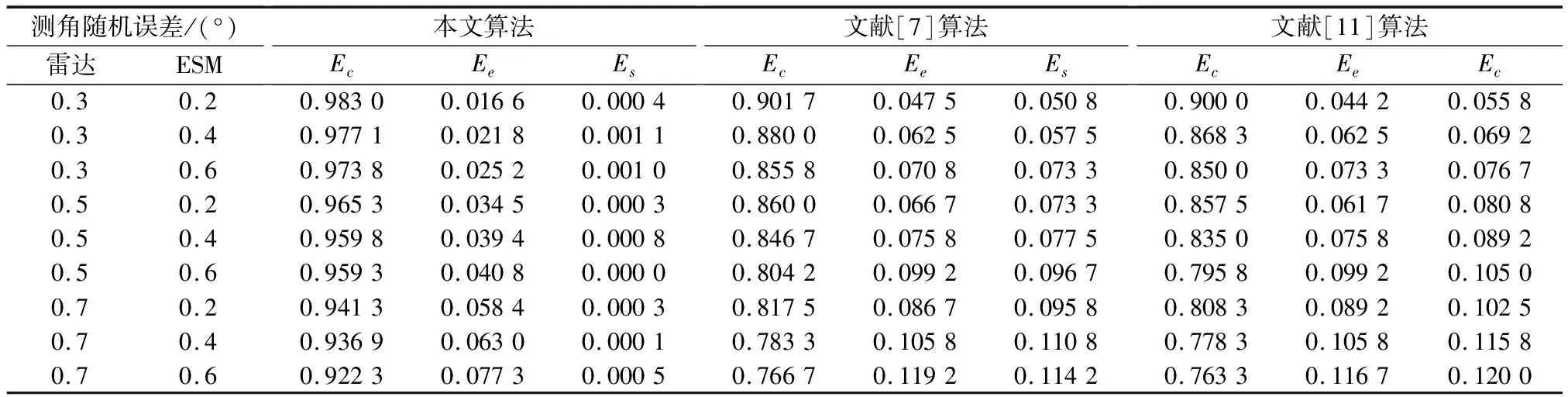
表1 雷达与ESM测角误差的影响
图4为场景1中雷达和ESM测角随机误差取定为0.8°,0.6°时,测距随机误差对正确关联率的影响。可以看出,随着雷达测距随机误差的增大,3种算法的正确关联率均有所下降,但从算法关联效果下降的程度并结合表1数据可以看出,3种算法受测角随机误差的影响大于测距随机误差的影响,且本文算法关联效果明显优于文献[7,11]算法。
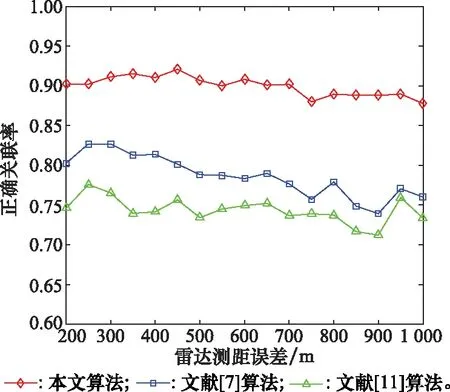
图4 雷达测距误差的影响
图5给出了在场景1中算法复杂度的比较。与传统算法相比,本文算法所用指标离散度是对混合数据集合整体特征的求解,而不是对逐个数据点的求解,所以具有较佳的运算效率。而文献[7,11]算法涉及大量函数求导运算,故耗时较高。
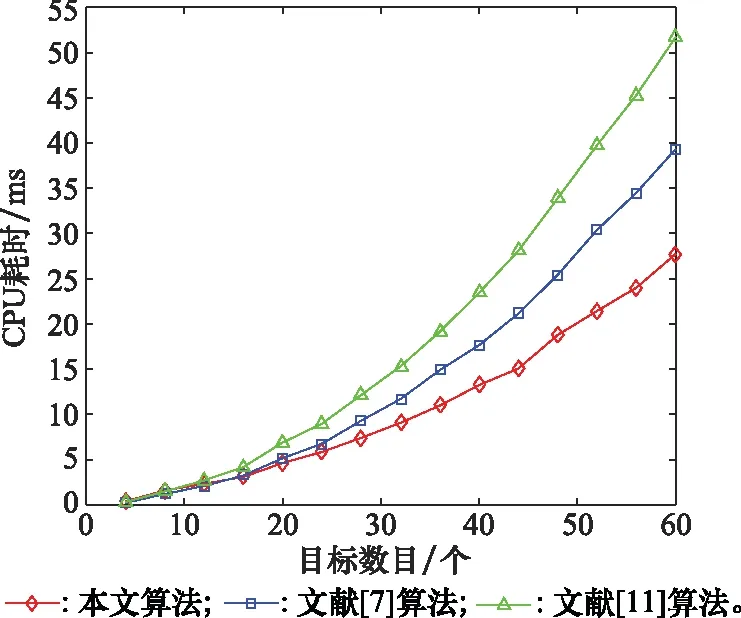
图5 算法复杂度对比
3.3 二维空间异步航迹关联分析
传统关联算法不能对异步航迹直接处理,默认在预处理中进行时域配准。为研究本文算法对异步航迹直接关联的有效性,在场景1中改变雷达与ESM传感器的采样周期与时延,进行仿真验证。
图6给出了雷达与ESM传感器不同采样率之比对3种算法的影响。

图6 采样率之比的影响
可以看出,由于采样率之比的增大直接导致时域配准时需要滤波插值的航迹点数目增加,使得滤波误差迅速累积,故采样频率相差越大,文献[7,11]中算法关联效果越差。而本文算法将异步航迹的不确定性转化为区间数表示,对区间数集合进行处理,降低了异步现象对算法效果的影响,故本文算法效果随采样率之比的变化不大。
从表2中可以看出,开机时延对本文算法的影响较小;而随着采样周期增大,算法正确关联率有所下降。这是由于离散度属于统计度量,其度量精度与数据点数目有关,采样周期越长,数据量越少,对离散度的刻画越不准确,故算法关联效果有所下降。
结合图6和表2可知,本文算法无需时域配准,可有效解决异步不等速率航迹关联问题。
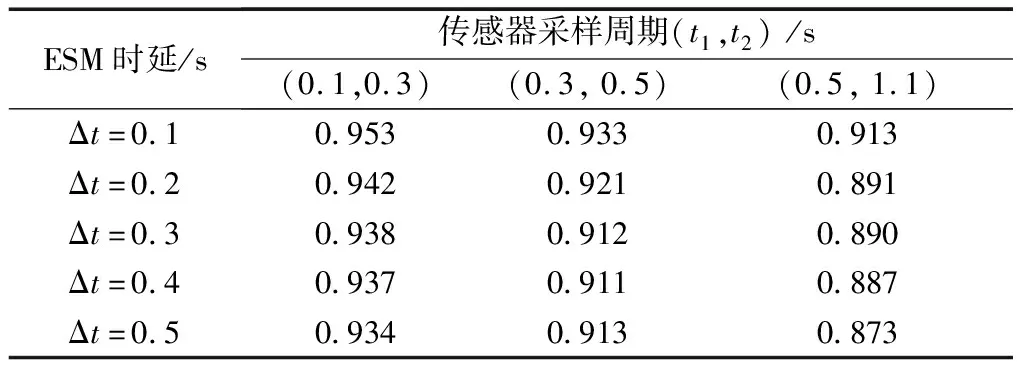
表2 二维空间下异步航迹关联的正确关联率
3.4 目标数目与噪声分布的影响
在场景1中改变目标数目与噪声分布,研究本文算法的性能。从图7中可以看出,本文算法受目标数目的影响较小,而文献[7,11]中算法的正确关联率随目标数目的增加迅速下降。这是由于文献[7,11]中算法是基于距离的统计类算法,对噪声的独立性和分布形式有严格要求,当目标过于密集时,量测数据的协方差无法忽略,误差不满足独立高斯分布,算法性能将受到明显影响。
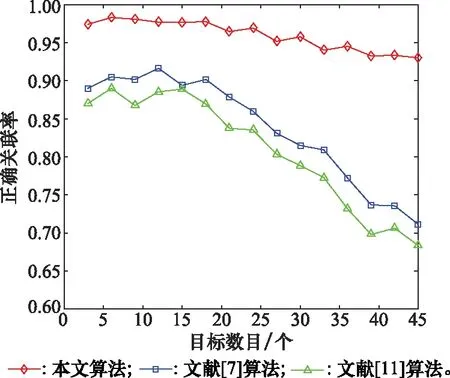
图7 目标数目的影响
从表3中可以看出,噪声分布形式对本文算法几乎没有影响,这是由于离散度是不依赖噪声分布形式的普适量。而文献[7,11]等统计类的关联算法,其基本假设为传感器测量误差相互独立,且服从零均值高斯分布。

表3 噪声分布形式的影响
结合图7和表3可知,本文算法对噪声分布不敏感,考虑到噪声实际分布形式的不确定性,本文算法具有更好的适用性。
3.5 三维空间航迹关联适用性分析
在场景2中改变雷达与ESM传感器的采样周期与时延,对三维空间中异步航迹关联时的算法适用性进行仿真验证。
从表4中可以看出,与二维空间中的异步航迹关联类似,开机时延对本文算法的影响较小;而随着采样周期的增大,算法正确关联率有所下降。由于3D雷达提供的俯仰角信息参与投影点坐标计算,与二维空间相比,三维空间下进行异步航迹关联时的算法性能有所下降。
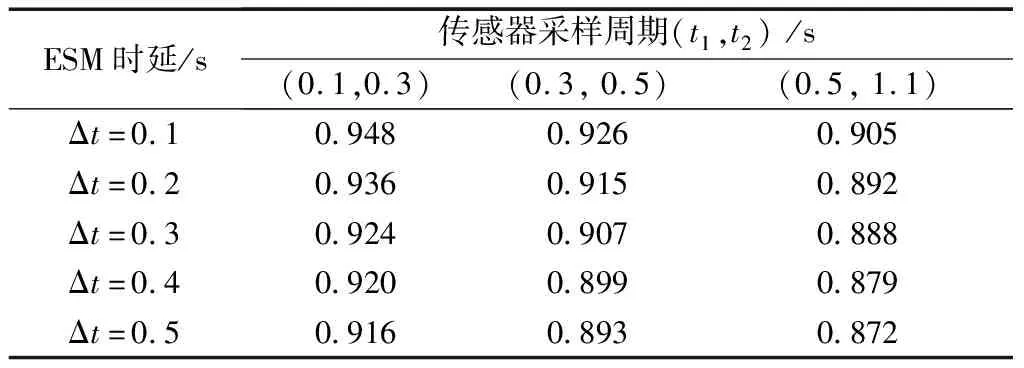
表4 三维空间下异步航迹关联的正确关联率
改变场景2中雷达与ESM方位角以及雷达俯仰角的随机测量误差,研究其对本文算法性能的影响,如图8所示。
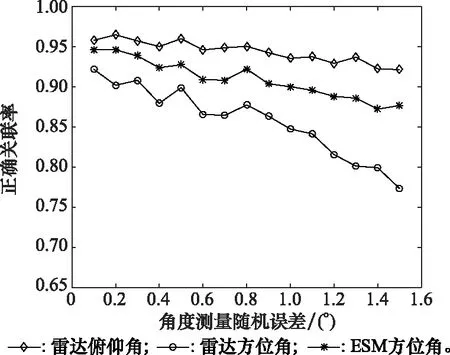
图8 角度测量随机误差的影响
可以看出,算法受不同角度测量随机误差的影响不同。其中,雷达俯仰角测量随机误差的影响较小,而雷达方位角测量随机误差的影响较大。这是由于俯仰角只参与雷达测量点投影坐标的计算,而方位角既参与投影坐标的计算,又参与交叉定位点的计算,故方位角测量误差的增大对算法性能有更为明显的影响。
结合表4和图8可知,相较于二维空间,三维空间雷达多一维俯仰角信息,相应随机测量误差的加入使算法性能有所下降。但通过仿真发现,俯仰角测量误差对算法性能的影响有限,从整体角度而言,算法可以有效解决三维空间中的异步航迹关联问题。
4 结 论
针对雷达ESM传感器异步航迹关联问题,本文以交叉定位为原理,给出异步航迹序列的区间化方法和区间序列离散度的具体度量指标,并定义不等长航迹序列的等长区间变换,通过多维分配实现异步航迹关联。与传统算法相比,无需时域配准,可直接对异步航迹进行准确关联。
航迹关联指标区间序列离散度不受噪声分布形式的影响,适用性较强,且数据区间化的模糊处理方式使算法受航迹异步与测量误差的影响较小,具有良好的正确关联率;对航迹序列数据集进行的整体离散特征的求解方法,避免了逐点计算,使得算法具有较佳的运算效率。