基于生物智能的无人集群协同控制
2021-04-13郭褚冰张锴张永平
郭褚冰 张锴 张永平
1.中国电子科技集团公司第二十研究所数据链技术重点实验室陕西西安710068 2.西安电子科技大学人工智能学院陕西西安710071
21 世纪以来,无人机在载荷小型化、续航时间、超视距测控通信等方面取得了长足进展;同时,复杂环境感知技术、精准推理决策技术、多机协同技术等智能化技术,正推动着无人机从单平台地面测控执行简单任务到无人集群自主协同实现“侦-控-打-评”全作战流程.在可以预见的未来,无人集群自主协同作战将生成多种新质作战能力,成为信息化战争的重要形式.
由于无人集群需要在高度动态化、不确定性、强对抗的场景下执行复杂任务,所以也决定了无人集群需要具备较高的自主性和自适应性,而无人集群的自主协同控制是其中的关键技术.无人集群自主协同首先是时空的一致统一、信息的一致表达和态势的一致理解;从而实现任务的协同,再通过智能化的处理协议实现对任务的分解与交互;支撑跨平台异构传感器要素级协同.无人集群自主协同能力的提升可以有效地解决信息不完备、不确定条件下异构无人平台态势信息一致性有效建模,作战资源的动态分配与统一调度和面向任务需求的多平台协同路径规划等关键问题.
美军从2000年率先提出自主作战概念,并打造无人机自主集群,在全球范围内保持无人系统技术的领先地位.其中,美国国防部在2005年8月份发布《无人机系统路线图2005-2030》将无人机的自主等级划分为1~10 级,预计在2025年后无人机将具备全自主能力[1].2016年5月,美国空军发布了《小型无人机系统飞行规划2016-2036》,从战略层面肯定了小型无人机系统的应用前景和价值[2],并对“蜂群”、“编组” 和“忠诚僚机” 作战概念进行了阐述.2018年8月,美国国防部发布了《无人系统综合路线图2017-2042》的新版路线图,再次强调了自主性与协同性对于加速无人系统领域进步的重要性,在理论研究的同时,加速推进典型无人集群自主协同试验验证项目.
1 基于簇头通信的Vicsek 模型
实现集群协同控制的一个首要条件就是个体间的同步运动,包括速度和方向,生物集群在个体行为简单,交互有限的条件下快速实现同步运动,具有很好的借鉴意义[3−4].生物集群建模的研究开始于20 世纪80年代对鱼群和鸟群的运动计算仿真[5],在生物集群运动机理方面较为突出的代表人物有Reynolds、Vicesk 以及Couzin.Reynolds 等提出分离、聚集、速度一致3 个基本规则,这3 个基本规则对群体模型的建立具有基础意义,Vicesk 模型从统计力学的角度建立了一个逼近生物集群运动本质的模型.Couzin 模型将个体的感知区域由内而外依次分为排斥区域、对齐区域和吸引区域3 个不重叠的区域,分别对应群体中分离、速度一致和聚集规则.
Vicsek 模型[5−6]具备了复杂集群运动的关键特征,N个自治个体组成的离散时间系统,用集合∑={1,2,···,N}表示所有个体构成的集合,初始位置和初始运动方向都是随机分布,所有个体都在一个L×L的区域内自由移动,个体的运动速度是恒定的,运动方向则是按照所有邻居运动角度的矢量平均进行更新,在更新的过程中还会受到一个高斯白噪声的干扰.
首先,个体i的邻居由以个体自身当前位置为中心与该个体的欧式距离小于感知范围R(R>0)的个体组成,||•||为向量的欧式距离,xi(t)为感知范围内以R为半径的圆形区域的所有个体(如图1所示),用Si(t)表示个体i在时刻t的邻居组成的集合,因此,公式为:

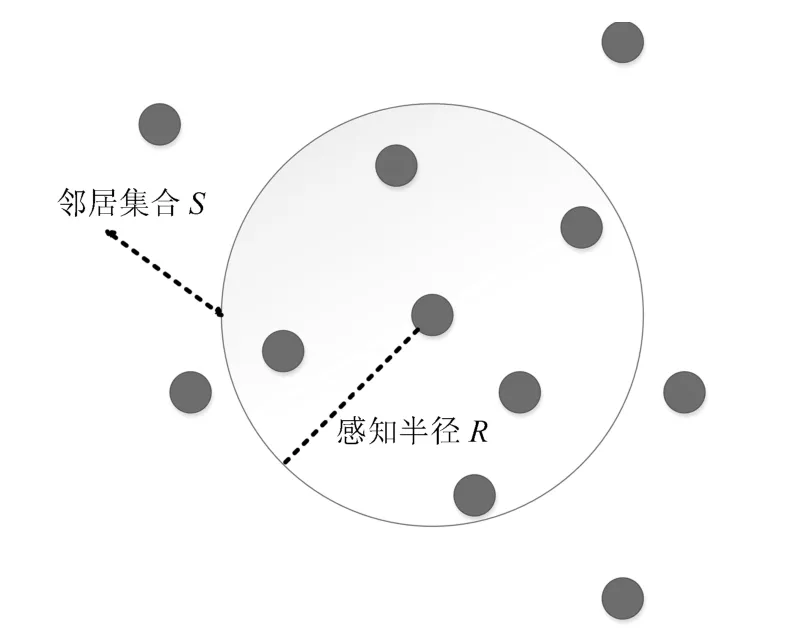
图1 Vicsek 模型感知范围示意图Fig.1 Schematic diagram of Vicsek model perception range
每个个体具有相同的速度v0,个体i在t时刻的运动方向θi(t)∈(−π,π],因此,速度的运动矢量v(t)=[v0cos θi(t),v0sin θi(t)]T个体i在t+1 时刻的位置和运动方向更新公式,即
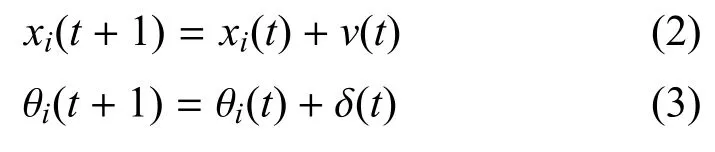
式(3)中,δ(t)为均匀分布的高斯白噪声,其中θi(t)的计算公式如下:

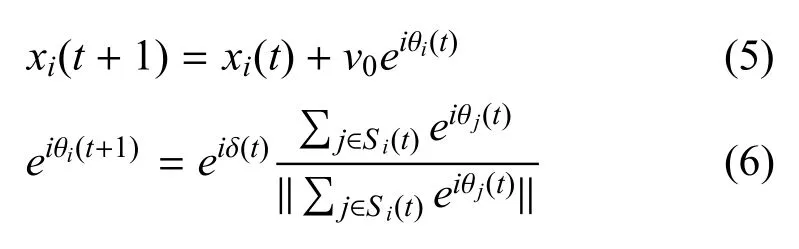
可将Vicsek 模型转化至复平面上,则位置和运动方向更新为:
在基本Vicsek 模型中,每个个体仅与感知半径范围内的邻居进行通信,但在实际的无人集群作战体系中平台的载荷、任务不尽相同,通常会对集群进行分簇归类,把具有相同作战能力和任务的同构平台进行整合,每个簇中都会有承担簇间通信和簇内指挥控制角色的簇头平台,将该簇头平台在基本Vicsek 模型中建模,在N个自治个体中存在M(M

个体的感知范围由R扩展至M×R,因此,会提高集群一致性运动的收敛效率,接下来将通过仿真进一步得到验证.
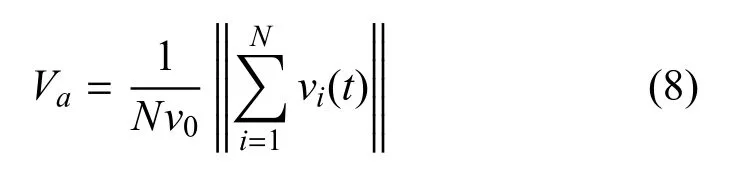
为了描述集群所有个体运动一致性程度,这里定义序参量[7],也称有序度,是集群内所有个体归一化的平均速度,序参量越大表示同步程度越高,即
收敛时间一般定义为序参量达到0.99 时所用最短的仿真时间作为收敛时间,即

基本Vicsek 算法与改进型Vicsek 算法设计流程对比,如图2所示.
基本Vicsek 算法的设计主要包含了参数设置,个体位置与角度初始化,邻居个体的计算和平均运动方向计算等步骤;基于簇头通信的Vicsek 算法设计在此基础上增加了集群内簇头确定,簇头感知半径计算,簇头间位置与角度的共享等步骤,针对两种模型进行建模仿真.

图2 基本Vicsek 算法与改进型Vicsek 算法设计流程Fig.2 Basic Vicsek algorithm and improved Vicsek algorithm design process
设置初始化参数,迭代次数T=50,集群总数量N=1 000,运动范围L=10,噪声大小Noise=0.2,感知半径R=1,速度的模值V=0.08,簇头数量M=10,集群初始状态如图3所示,是一个随机运动状态.
在迭代50 次之后,基本Vicsek 集群状态与改进型Vicsek 集群的状态如图4和图5所示.
可以明显地观察到,改进型Vicsek 集群在迭代50 次后已经达到一致性运动,而基本Vicsek 集群则还未收敛.接下来计算两种模型收敛所需的时间TC,它们在不同条件下的收敛时间如图6所示.
从收敛时间TC的对比中可以得出,改进型Vicsek 随着簇头数量M的增加可以有效地提高集群的同步效率.
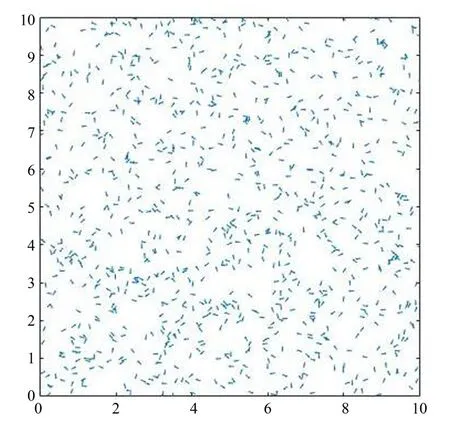
图3 集群初始状态Fig.3 Initial state of the swarm
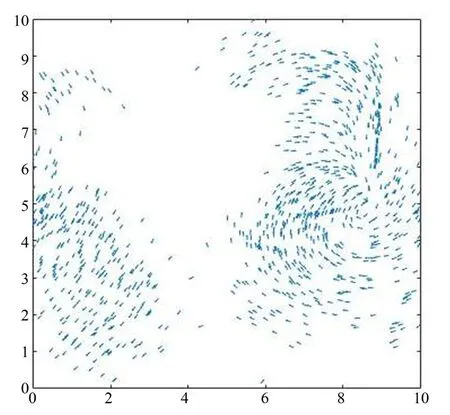
图4 基本Vicsek 集群状态Fig.4 Basic Vicsek swarm status
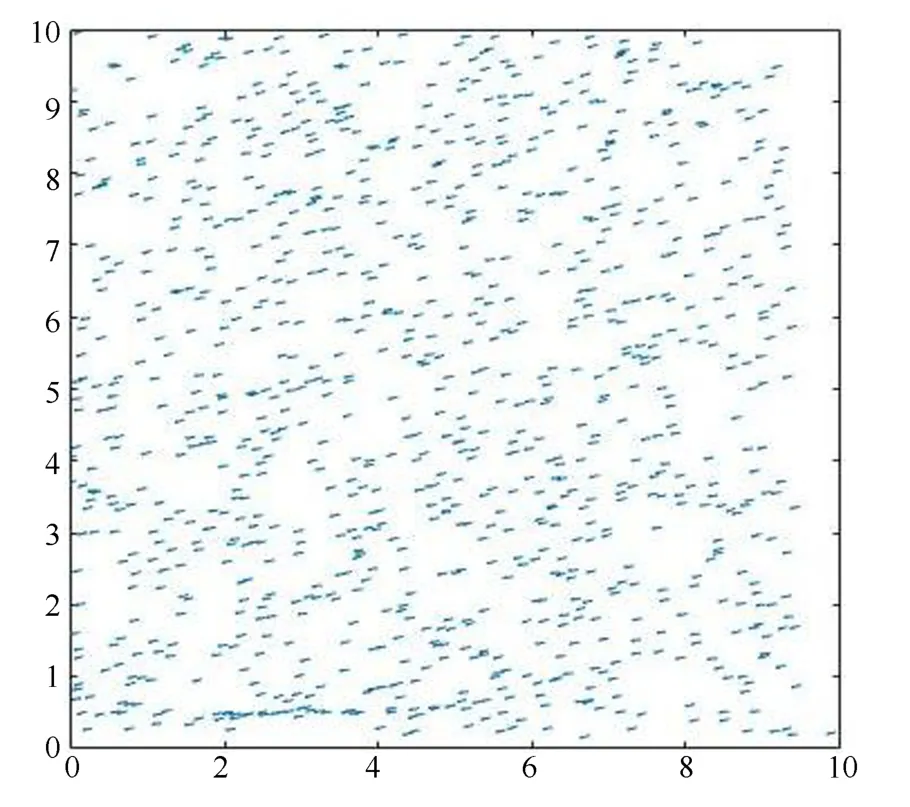
图5 改进型Vicsek 集群状态Fig.5 Improved Vicsek swarm status
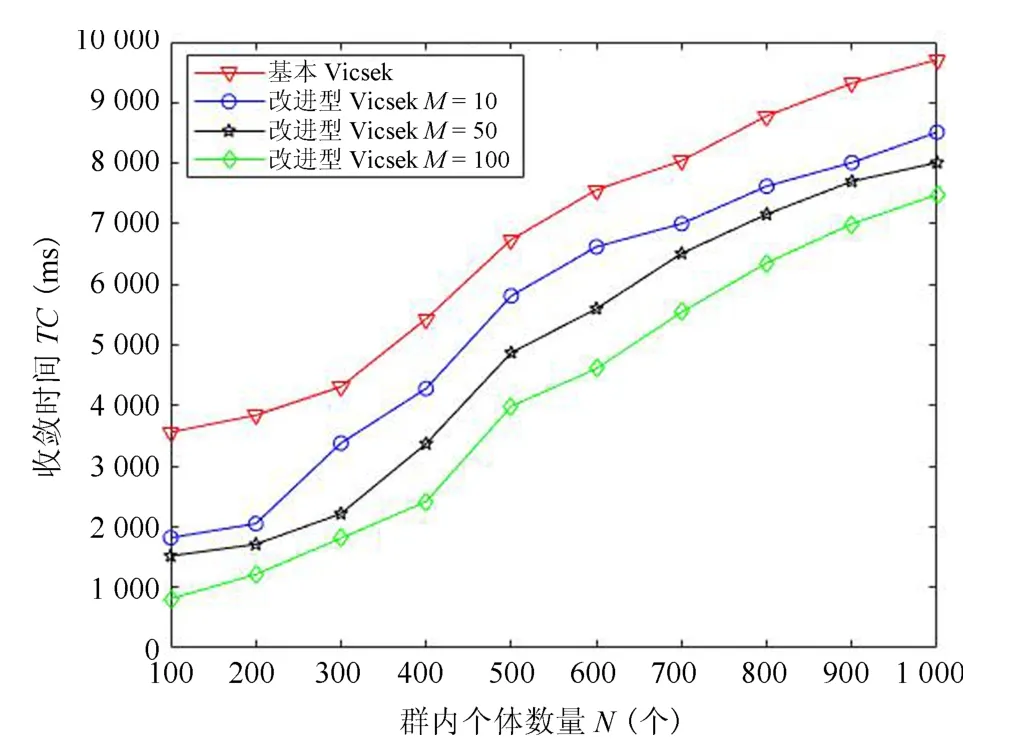
图6 基本Vicsek 和改进型Vicsek 在不同条件下的收敛时间Fig.6 Convergence time of the basic Vicsek and the improved Vicsek under different conditions
2 局部通信条件下的PID 协同控制器设计
生物集群在局部感知、个体行为简单的条件下实现了复杂的行为模式,包括稳定的编队形成和重构,而且具有较强的鲁棒性和“自愈”能力.生物集群的这些行为模式和控制策略可以为无人集群的协同控制提供研究思路.
无人集群在协同感知、协同决策的基础上实现协同控制[8],尤其是集群在实现高机动性的规避和执行复杂任务的过程中,仅仅依靠单个无人平台的能力是无法实现的.多平台的协同控制器将从平台动力学模型出发,基于生物集群的协同控制策略设计高效的感知与决策交互协议和协同控制器参数.
无人机平台实现稳定的飞行和姿态的变换主要由飞行控制器实现,飞行控制器通过输出PWM 波信号对电机的转速进行控制实现相应的动作.在最优化控制领域有诸多算法和理论,但在工程应用方面,基于经典的PID 控制算法仍然是最有效的实现方案.当无人集群进行编队飞行时,不仅要考虑单平台的稳定控制,还要考虑编队中长机和僚机的相对位置,僚机的航向、速度、高度的变化要能适应长机的动态变化,因此,要设计适用于无人集群自主协同的控制器及其策略具有重要意义.
PID 控制器是一种线性控制器,它主要根据给定值和实际输出值构成控制偏差,然后利用偏差给出合理的控制量[9].几款开源飞控中,无一例外地都是采用PID 控制算法来实现无人机的姿态和轨迹控制.PID 里的P为比例因子,I为积分因子,D为微分因子,P和I提高系统稳态精度,D提高系统稳定性,PID 控制原理图如图7所示.
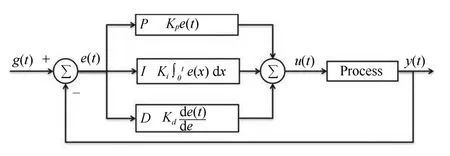
图7 PID 控制原理图Fig.7 PID control principle diagram

在PID 控制器中g(t)为给定值,e(t)为偏差量,u(t)为控制变量,y(t)为当前状态,Process 为执行器.借鉴生物集群领航编队的原理,PID 协同控制器将当前的态势信息、任务指令经过处理后产生对应的编队几何形状、拓扑结构、跟随策略等控制指令和PID控制参数,控制架构如图8所示.
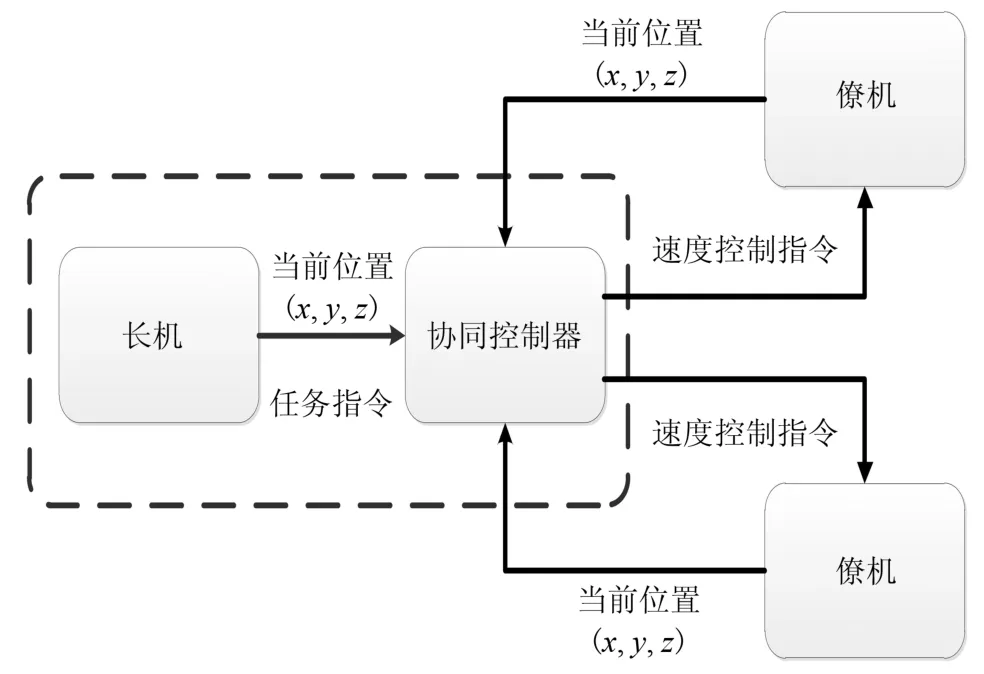
图8 协同控制器框架Fig.8 Cooperative controller framework
这里PID 协同控制器的距离参数调整式[10−11],当长机与僚机之间的距离偏差为∆L,速度偏差为eV,因此,综合控制偏差为:

这里kL距离偏差控制增益,kV为速度偏差控制增益,采用PID 控制律收到速度的控制指令,即

根据当前期望的速度值和PID 控制参数,实现长机与僚机的速度一致,集群内部可共享PID 控制参数实现快速的编队重构.基于PID 的协同控制器将与作战任务、感知数据结合,实现从感知、决策到控制的闭环.
3 基于MAVLink 的消息帧扩展方案
无人机与地面站、有人机的信息共享、情报分发、遥感测控主要是通过数据链实现,因此,数据链也被称为无人机系统的“神经网络”.军用无人机数据链研发与应用要早于民用领域,美军在该领域一直处于领先地位,并为装备的各类型无人机设计了与之匹配的数据链,其中,数字数据链DDL 是一种基于IP 的战术数据链,配备在美军的RQ-11B “乌鸦”无人机,而战术通用数据链TCDL 是基于CDL 专门为无人机开发的抗干扰、全双工通信链路.可以看出,数据链主要用于战场态势信息共享、情报分发和战术协同,在平台及要素协同控制方面尚未开展相关工作[12].数据链的优势在于频带宽、频谱利用率高、抗干扰能力强、传输距离远,但也存在功耗高、体积大、可扩展性差、成本高等劣势,因此,在无人集群协同控制方面,可借鉴民用数据链测控协议开源、可扩展、环境易构建等优势.
在民用数据链领域,MAVLink 开源协议[13−14]在各类型无人机中得到了广泛的应用,MAVLink 协议最早由瑞士苏黎世联邦理工学院计算机视觉与几何实验组于2009年发布,并遵循LGPL 开源协议.MAVLink 协议是在串口通讯基础上的一种更高层的开源通讯协议,主要应用在微型飞行器(Micro Aerial Vehicle,MAV)的通讯上.协议以消息库的形式定义了参数传输的规则,支持无人固定翼飞行器、无人旋翼飞行器、无人车辆等多种类型的无人机.MAVLink协议帧结构如表1所示.
在MAVLink 协议帧中,定义了新消息起始位、负载长度、数据包丢失检测、发送数据的系统ID和组件ID、消息负载和CRC 校验;其中负载PAYLOAD 中的数据最为重要,包含了心跳包、飞行器类型、飞控类型、基本模式等信息,以及航路添加、巡航、返航、转向等功能.
在当前MAVLink 协议中,飞行控制器与地面控制站点通过MAVLink 协议交互任务信息与控制信息.针对无人集群的典型应用场景以及本文研究结果,MAVLink 协议需要进行如下扩展:
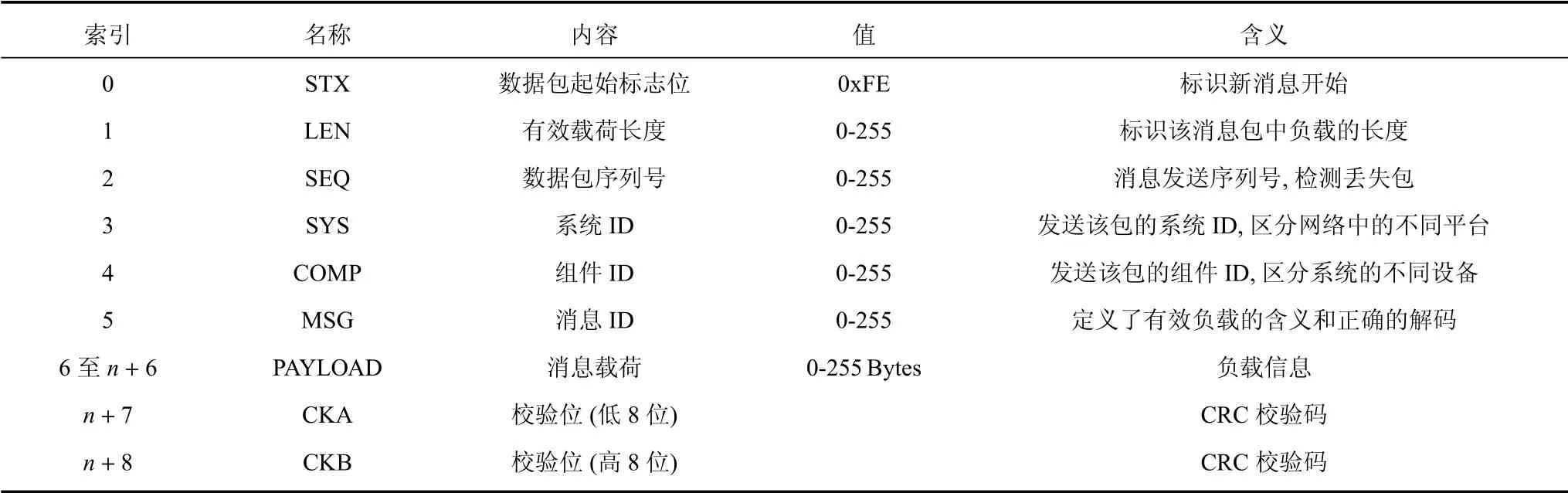
表1 MAVLink 协议帧结构Table 1 MAVLink protocol frame structure
1)由点对点通信协议扩展至多点分布式的通信协议.
2)针对集群Vicsek 模型,协议中需要共享集群成员数量、感知半径、运动速度和运动角度等参数.
3)针对PID 协同控制器,需要实时共享平台的PID 参数、速度、位置、编队队形结构、跟随策略等信息.
4)增加传感器数据与控制数据的深度交联,提升平台的协同控制能力.
5)针对拒止环境,需要增加相对导航和相对定位功能(参考link-16).
4 无人集群突防攻击下的协同控制信息流程
无人集群突防攻击是综合运用参战的各类型无人平台,根据作战方案和当前的敌我态势信息,通过诱骗和电子压制突破敌方火力拦截,在线实时分析与决策实施对敌方高价值目标的选择和高精度的协同控制打击,具体流程如图9所示.
无人集群突防攻击的特征:1)作战单元均是无人平台.2)平台异构特征明显.3)无人平台自主协同能力差异较大.4)多平台要素级协同控制.5)感知-决策-控制的深度耦合.6)无人集群的协调一致性.
无人集群突防攻击作战概念视图如图10所示.
无人集群突防攻击首先根据作战需求形成静态任务规划,确定需要参战的无人平台类型、载荷配置、网络及传输要求,形成一个动态无中心的信息系统.利用PID 协同控制器和扩展版本MAVLink 协议实现传感器、武器、飞行控制系统的交联,支撑编队快速变换、态势感知、联合探测、目标监视、攻击引导等作战功能.
作战平台包含侦察型无人机、攻击型无人机、地面无人指挥车、地面攻击战车、水下潜航器,传感器包含了测控链路、雷达、导弹、协同控制器等,同时与地面有人指挥所共享前方态势信息.
协同信息交换矩阵[15−16]的内容包括作战过程中各平台和传感器交互的信息、信息的流向及作用等,如表2所示.
5 结论

图9 无人机群突防攻击信息流程Fig.9 UAV swarm penetration attack information process
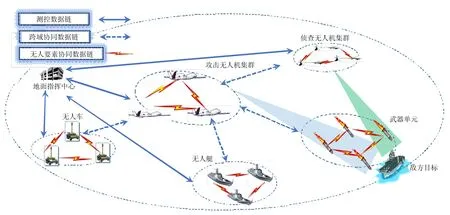
图10 无人集群突防攻击作战概念视图Fig.10 Conceptual view of unmanned swarm penetration attack operations
通过对生物集群的运动机理与模型研究,提出并设计了改进型Vicsek 模型和PID 协同控制器,并将研究的结果应用到MAVLink 的消息帧扩展中,用于提升无人集群的协同控制能力,同时结合典型的作战场景,细化了控制协议与控制策略.未来将会结合特定无人机平台,在典型应用场景下,对协同控制器和改进MAVLink 协议的协同控制能力进行实验验证.

表2 作战信息交换矩阵Table 2 Combat information exchange matrix
随着无人集群系统的复杂性不断提高,包括成员数量的倍增和平台差异性的不断增大,以及作战场景的需求不但提升,未来无人集群的发展有如下趋势:1)人工智能技术提升集群自主感知、决策的水平[17].2)协同层次与协同深度不断地扩展,形成有人/无人、无人/无人的混合发展模式.3)互操作能力扩展至不同的维度,要素级协同能力不断提升.
