集群系统协同控制:机遇与挑战
2021-04-13谷海波刘克新吕金虎
谷海波 刘克新 吕金虎
1.北京航空航天大学自动化科学与电气工程学院北京100191 2.北京航空航天大学大数据科学与脑机智能高精尖创新中心北京100091
人工智能的迅速发展为人类生活提供了巨大便利,深刻改变了社会生产方式.2018年10月31日,习近平总书记在中共中央政治局第九次集体学习会上强调:人工智能是新一轮科技革命和产业变革的重要驱动力量,加快发展新一代人工智能是事关我国能否抓住新一轮科技革命和产业变革机遇的战略问题[1].为了抢抓人工智能发展的重大战略机遇,增强人工智能发展的先发优势,我国已将人工智能研究作为加快建设世界科技强国的重要战略指标.
集群系统的协同是一类重要的群体智能,是人工智能未来发展的必然趋势,也是新一代人工智能的核心研究领域[2].集群系统是一类典型的复杂系统,它是理解从局部到整体,从微观到宏观涌现现象的纽带和桥梁,也是复杂系统研究的前沿方向之一.集群系统已经渗透到自然社会的各个领域,与人们的日常生活息息相关.集群系统是由大量智能体通过局部信息交互形成一个耦合的整体,每个智能体具有独立的动力学行为,系统整体在宏观层面上涌现出个体单独存在时不具备的行为特征,如同步、一致性、群集、相变、斑图等[3−8].
在集群系统的协同控制中,由于涉及的问题具有典型的复杂性特征,如智能体之间的信息交互具有随机性、智能体的动力学行为易受外部噪声干扰、智能体之间的信息传输具有滞后性、集群系统的网络拓扑具有方向性、集群系统的执行器存在饱和等[9].因此,这类问题涉及面广、具有很大的研究价值.此外,大量实际工程问题的解决也需要发展集群系统协同控制的新理论、新方法.控制论经过半个多世纪的发展,在简单系统的控制方面取得了巨大进展,形成了一套完整有效的理论与方法,对航空航天、工农业生产等领域的发展起到了巨大推动作用[10−12].但这些理论与方法在处理具有多重复杂性的集群系统时大部分已不再适用,这给控制理论与控制工程的研究带来了新的机遇和挑战.
1 研究背景及意义
随着人工智能等信息技术的快速发展,作为集群智能涌现载体的集群系统,在民用领域催生了社会经济发展的新动力,在军事领域促进了现代化战争模式的重大变革[13].任务的复杂性与环境的不确定性决定了集群系统协同控制势必朝着智能化和自主化方向发展.作为新一代人工智能的核心研究领域,集群协同控制技术已成为世界各国经济和国防发展的强大驱动力.多机器人协同技术入选2014年Science 十项重大科学突破;2015年Floreano 教授等在Nature 中指出:仿生机器人群已经广泛应用于国防、交通、环境保护、农业等领域,微小型自主机器人时代正在到来[14];2018年乔治华盛顿大学Keidar教授等指出:利用微小型卫星集群探索太空,不仅能够加速宇宙空间探索的进程,还可以降低太空探索的成本[15];2019年Rahwan 教授等在Nature 中指出:了解人工智能系统的行为对于控制它们的行为、获取它们的利益、降低它们的危害至关重要,分析机器群体的行为规律,有望突破人工智能面临的脆弱性、不可预见性、弱可解释性等技术瓶颈[16].
集群现象广泛存在于自然界中,大量生物个体聚集在一起就形成了生物集群,如鸟群、鱼群、兽群、微生物群等.研究发现,生物集群比单一个体在觅食、迁徙、逃避天敌等方面具有更大的优势[17−18].生物群体中的个体通过局部感知和行为交流,使整个集群在宏观上涌现出复杂的智能行为,如鸟群编队迁徙、鱼群协同巡游、狼群合作围捕等.图1给出了自然界中两种典型的生物集群现象示例[19].
现代仿生学的发展历程表明,研究自然界中集群行为的内在机理有助于阐明人类社会中的复杂集群现象,有利于解决工程领域中的诸多技术难题[20−21].一方面,人类社会中存在着大量的自组织现象[22],不同个体之间通过相互作用产生各种各样的集群行为,研究自然界中的集群行为不仅可以揭示大自然的奥秘,而且能够深刻理解人类社会的演化规律;另一方面,自然界中集群行为的研究成果将会为人类社会的科技革新提供理论与方法.军事领域作为人类社会的重要领域之一,群体智能在军事系统中有着广阔的应用前景[23−25].军事领域的集群系统是由大量具有自主能力的智能体按照一定的规则构成,如DAPAR 卫星群、无人机蜂群、多导弹集群等;集群智能则是通过智能体之间的有效协作,克服个体自身能力的不足,完成个体难以实现的复杂任务所涌现出的集群行为,如协同探测、集群突防、蜂群攻击等.图2给出了军事领域中两种典型的集群现象示例[26].
集群系统涉及自动化科学、系统科学、计算机科学、数学、物理、生物等多学科的融合,是近年来涌现出的信息科学重大前沿交叉领域.集群系统通过自主感知、组网传输、集群控制一体化协同控制技术实现集群智能,完成个体难以实现的复杂任务,在大面积灾情搜救、城市应急反恐、集群作战等社会服务、公共安全及国防装备中有重大应用.2014年,美军将集群协同控制技术列入第三次“抵消战略”的颠覆性基础研究领域,并制定了详细的发展路线图[27];集群协同控制技术也被我国列入《国家中长期科学和技术发展规划纲要(2006-2020)》优先发展领域.集群系统协同控制研究体现了面向国际学术前沿和国家重大战略需求的有机统一,具有十分重要的科学价值和社会意义.
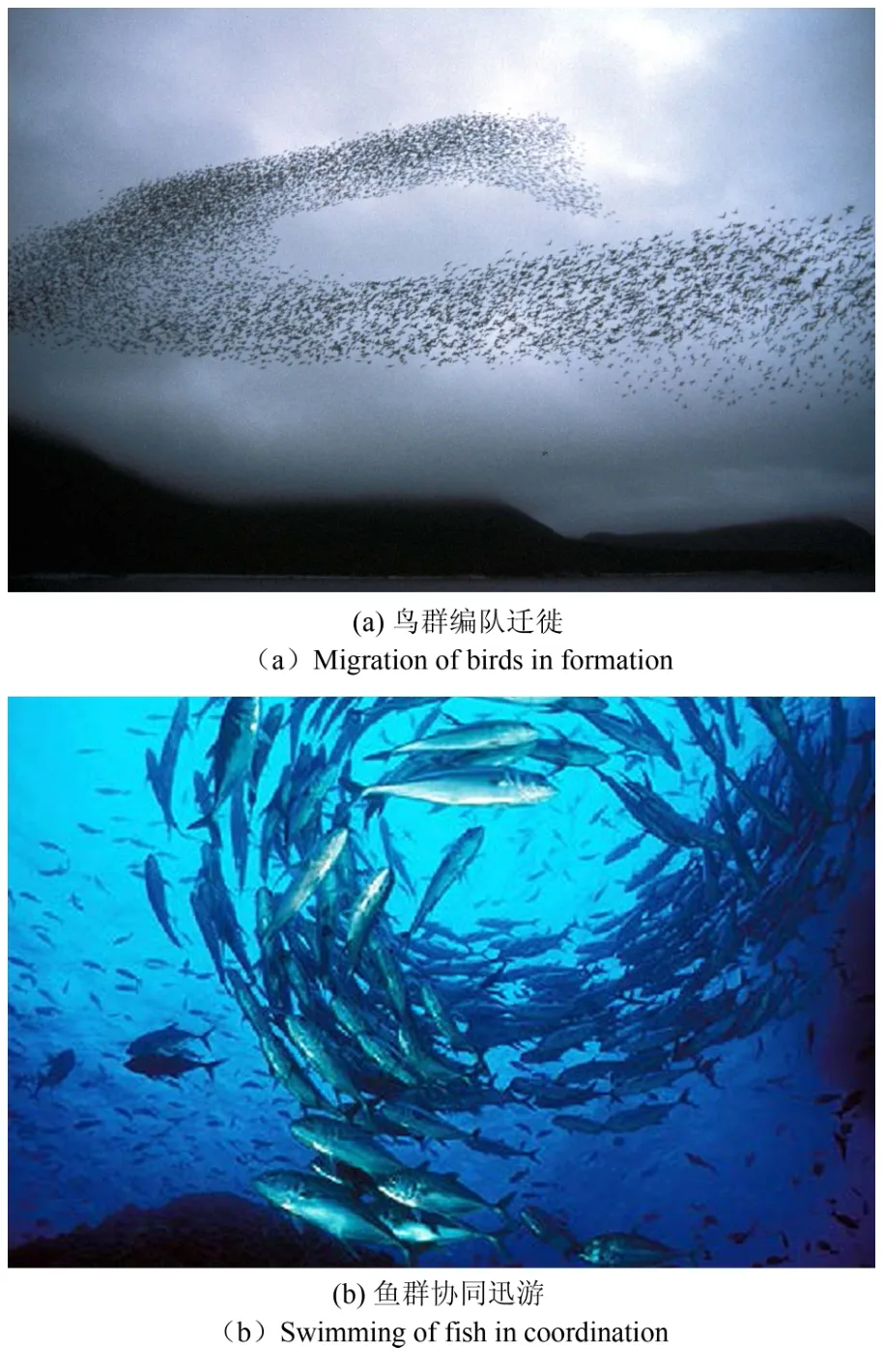
图1 自然界中的生物集群现象Fig.1 Biological clusters in nature
集群系统协同控制是一类亟需研究的问题.集群系统的协同是一类重要的群体智能,是新一代人工智能研究的核心领域.集群协同控制技术入选2019年美国国家科学基金会《未来20年美国人工智能研究团体路线图》[28],同时也被美国商务部列为新兴技术禁运名单.2017年国务院发布的《新一代人工智能发展规划》中,明确将自主协同控制与优化决策、集群智能、混合增强智能等3 项与集群协同控制相关的理论列为我国人工智能未来发展的基础理论[29];2018年,科技部启动的《科技创新2030“新一代人工智能”重大项目申报指南》中明确将“集群智能”列为人工智能领域的5 大持续攻关方向之一[30];2020年,中国科学院发布的《2019年人工智能发展白皮书》中,也将“集群智能技术”列为8 大人工智能关键技术之一[31].协同控制技术是集群智能涌现的保障和途径,是争夺的技术制高点,为保障我国在集群智能领域的世界引领作用和技术优势,深入开展集群协同控制技术研究迫在眉睫.
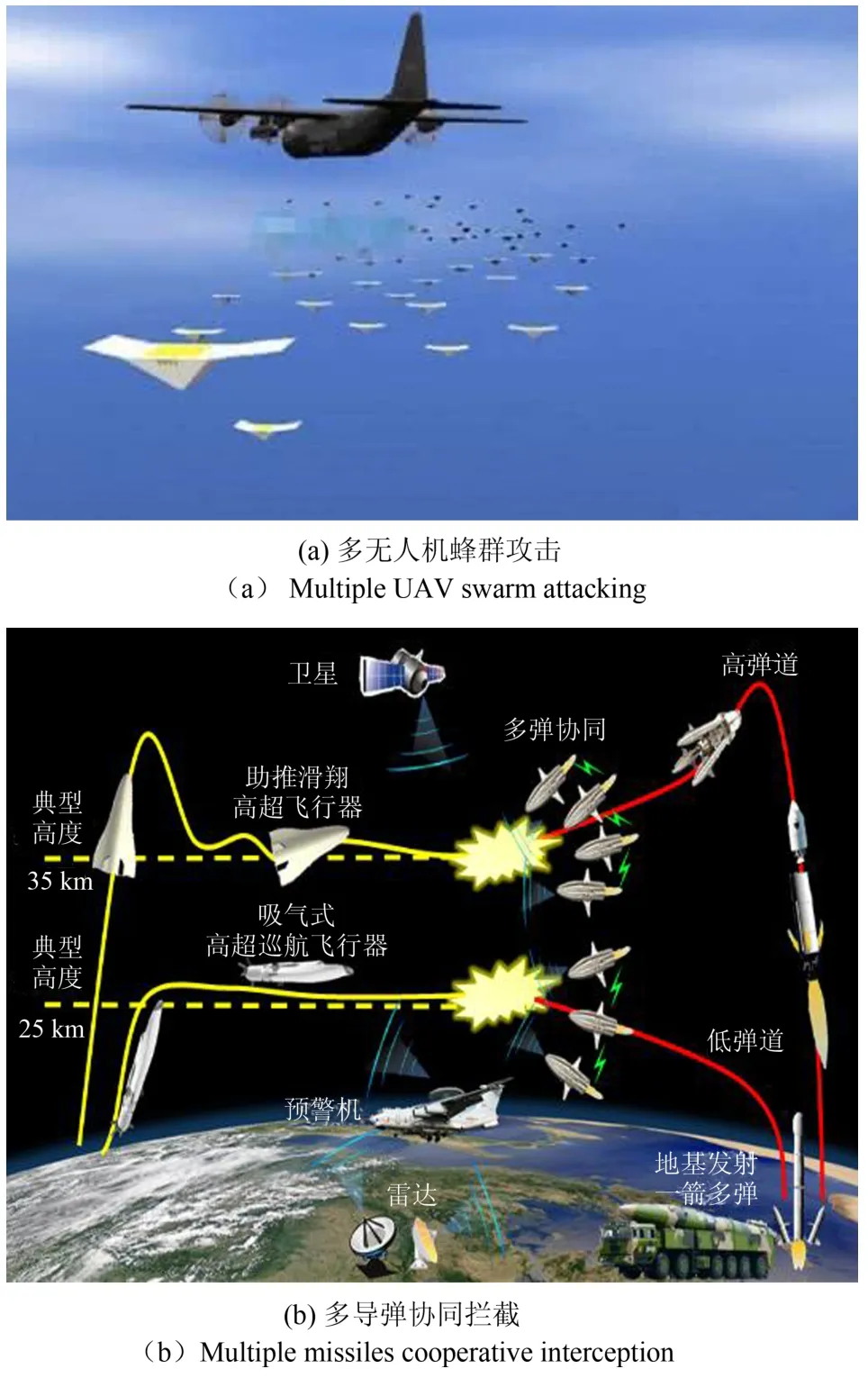
图2 军事领域中的集群现象Fig.2 Clusters in military field
2 典型控制方法
1948年Wiener 经典著作《控制论》的出版,标志着控制论学科的诞生.集群系统协同控制是控制论研究的一个重要分支,它结合控制理论的一般原理研究集群系统涌现出的特定行为和功能,如一致性、同步、蜂拥、云集等[32−38].一般来说,集群系统由智能体、交互方式和行为准则3 个要素组成.智能体是组成集群系统的基本单元,如无人机、机器人等;交互方式是描述集群系统中智能体之间的相互作用关系,如信息传输的网络拓扑;行为准则是描述智能体接收信息之后的反应规则,如控制律生成规则等.在集群系统协同控制中,由于涉及的问题具有典型的复杂性特征,如智能体的动力学具有异构、非线性特性,智能体之间的信息交互具有随机性,集群系统的执行器存在饱和,智能体之间的信息传输具有滞后性等.因此,这类问题涉及领域广,研究价值大,受到越来越多研究人员的青睐.集群系统具有大规模(智能体数量众多)、自组织(无中心节点)、分布式(局部信息交互)、涌现性(集群功能比单一智能体强大)等典型特征,可通过牵制控制、PID 控制、分布式观测器设计等方法实现集群智能.下面分别综述这3 种典型控制方法的相关研究工作.
2.1 集群系统协同控制中的牵制控制方法
集群系统具有大规模特征,直接控制系统中的每个个体是不可能的,也是不必要的.一个典型的自然现象是当蜂群向新的巢穴迁徙时,只有少数的侦查员蜜蜂知道应该朝哪个方向飞行,仅依靠这些少量的侦查员就能引领整个蜂群飞到新的巢穴,而这些侦查员蜜蜂的数量仅占数千只蜂群中的5%[39].美国科学院院士Levin 教授等在Nature 中证实了集群系统的规模越大,需要控制的个体比例越小[17].这一生物现象的内在机理对于移动智能体系统的协同控制有着潜在的工程应用[40].如何通过控制少部分关键节点实现对整个集群系统的有效控制,是集群协同控制面临的本质困难.受蜂群迁徙的启发,研究者提出了牵制控制方法.
假设集群系统含有N个相同的智能体,每个智能体是一个n维动态系统.不失一般性,假设选择前l个智能体进行牵制控制,其中,l=,0 <δ≪1,表示实数δN的整数部分,牵制控制下集群系统描述为
其中,xi=(xi1,xi2,···,xin)∈Rn,ui∈Rn分别为智能体i的状态变量和控制输入,f(t,xi):R+×Rn→Rn是连续可微的非线性函数,常数c>0 表示智能体之间的耦合强度,是内部耦合矩阵,表示智能体之间信息交互的邻接矩阵,如果智能体i和智能体j(i≠j)之间有信息交互,则ai j>0,否则aij=0.
牵制控制方法兴起于21 世纪初,现已成为控制理论中研究系统集群行为的一种有力工具.2002年Wang 和Chen 首先采用牵制策略研究了无标度动态网络的控制问题[41].Li,Wang 和Chen 进一步给出了牵制控制策略下复杂动态网络的稳定性条件,并将牵制控制与虚拟控制相结合探究了牵制策略选取的有效性[42].Lu 等通过设计牵制控制算法研究了有向复杂动态网络的全局稳定性,给出了牵制节点的选取与网络拓扑结构的关系[43].此后,这一问题得到了大量的研究,产生了丰硕的研究成果,如自适应牵制控制[44−45]、脉冲牵制控制[46]、牵制控制能控性[47−49]、牵制控制能观性[50]、牵制控制有效性[51]等.
近年来,牵制控制方法广泛应用于大规模集群系统的协同控制研究中,利用个体状态的局部信息和简单规则,使集群系统在宏观层面上涌现出集群智能[52−55].集群系统协同控制研究的挑战在于智能体之间信息交互的网络拓扑是时变的,并且网络初始时的连通性不能保证网络拓扑始终连通.为了克服这一困难,常规的做法是假设集群系统中存在一个真实或虚拟的领导者,并且其他个体都能够获得领导者的信息,无论网络拓扑初始状态是否连通,所有智能体都能保持内聚性,最终实现期望的群体智能,但这一假设在实际工程系统中很难实现.鉴于此,文献[54] 提出了一种基于牵制策略的集群算法,即只有一少部分智能体获得领导者的信息,其他智能体只要能够受到这些获得领导者信息的智能体的影响,整个集群系统就能够实现期望的群体智能.文献[55]通过设计控制协议保持网络在演化过程中的连通性实现群体智能.
课题组在集群系统的牵制控制方面进行了大量探究,取得了一系列成果[44−45,50,56−58].复杂动态网络的牵制控制存在一些挑战性的基本问题:1)一个具有固定拓扑和耦合强度的网络,需要牵制多少个节点才能实现控制目标?2)一个具有固定拓扑和确定牵制节点的网络,需要多大的耦合强度才能实现控制目标? 3)对于一个给定的复杂动态网络,牵制哪些类型的节点易于控制目标的实现? 针对上述问题,文献[45] 给出了几种自适应牵制同步规则,揭示了复杂动态网络的拓扑结构、耦合强度、牵制节点数与控制增益之间的本质定量关系;文献[56]研究了一类典型复杂动态网络的同步机理,给出了易于验证的牵制控制判别准则,以及牵制节点的选择方式和控制增益设计方法.针对有向复杂动态网络,文献[57]研究了强连通网络、有向生成树网络、弱连通网络、有向森林网络的牵制同步问题,首先给出了强连通网络牵制节点的选取方法,即入度小的节点和出度大的节点需要优先牵制;其次给出了由多个强连通分支组成的有向生成树网络的牵制同步判据,即入度小的强连通元组成的超节点应当牵制;最后设计了上述4 种有向复杂动态网络实现同步的牵制控制算法.文献[46]通过设计牵制脉冲控制算法,研究了有向复杂动态网络的同步,并验证了算法的收敛性和鲁棒性.文献[58]阐述了牵制控制方法在集群系统协同控制中的一些研究进展,对于具有固定拓扑的网络,分析了牵制控制的可行性、稳定性以及有效性;对于拓扑时变的移动多智能体系统,给出了基于牵制策略的集群控制方法.
2.2 集群系统协同控制中的PID 控制方法
集群系统是一类典型的复杂系统.一方面,集群对象之间的强耦合相互作用、系统结构的不确定性、信息传输的滞后性、外部噪声干扰、执行器饱和等因素,导致系统受到多种约束条件的制约;另一方面,集群协同控制采用的策略大都仅利用了系统状态的当前信息,难以满足诸如无人机群等高科技领域对控制性能不断提高的要求.由于PID 控制是一种具有“过去-现在-未来”形式的简单线性反馈机制的反馈控制;控制协议设计时不仅利用了系统状态的当前信息,还利用了系统状态的过去信息和未来信息;PID 控制可以通过积分作用消除系统的静态误差,通过微分作用预测系统状态的未来发展趋势;PID 控制不仅应用于能够建立精确数学模型的确定性系统中,还可以应用于难以建立精确数学模型的不确定性系统中[59−60].因此,PID 控制方法为集群系统协同控制的研究提供了强有力的工具.
PID 控制协议由比例项P,积分项I和微分项D三部分组成,通过调节这三部分的系数KP,KI和KD实现对系统控制的目的.PID 控制协议的具体形式为
其中,u(t)是系统的控制输入,e(t)=x(t)−(t)是系统误差,KP>0,KI≥0,KD≥0 分别为比例项、积分项和微分项的控制增益.PID 控制流程如图3:
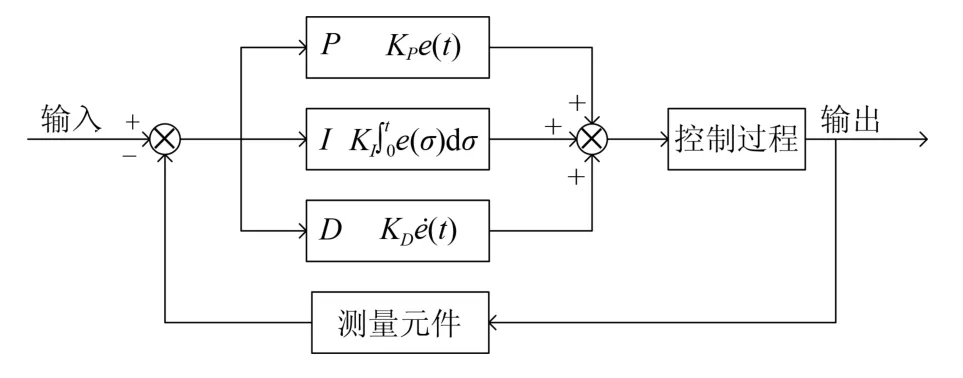
图3 PID 控制流程图Fig.3 The process of PID control
在国内外相关研究的推动下,学术界在基于PID协议的集群系统协同控制这一新型领域取得了一系列研究成果[61−72].早期的研究工作主要集中在神经网络系统的调控上,2009年Cong 等针对不确定单输入多输出集群系统,根据混合局部递归神经网络的思想,设计了基于非线性神经网络的自适应PID 控制协议,该协议具有稳定的学习速率,能够根据系统误差和外部干扰等不确定因素产生的误差,在线实时更新神经网络的权值[61].2013年Cheng 等研究了带有多个领导者的多智能体系统在离散时域和连续时域中的约束控制问题,为了使所有跟随者都能同步到由领导者生成的凸包上,提出了一种PIn型约束算法,并从理论上证明了该算法的有效性[62].同年,Jing 等将前馈神经网络的鲁棒学习问题转化为线性动态离散系统的鲁棒PID 控制问题,提出了最优PID控制算法,保证了算法的全局鲁棒收敛性,提高了算法的收敛速度[63].
对于具有无向拓扑的多智能体系统,2014年Andreasson 等通过设计分布式PI 控制协议,探究了一阶与二阶同构(homogenous)线性多智能体系统的一致性,进而采用所设计的控制协议实现了智能电网的一致性[64].2015年Bernardo 等通过设计PID 控制协议分析了一阶异构(heterogeneous)线性多智能体系统的同步和一致性,通过适当的状态变换和构造相应的Lyapunov 函数,证明了PID 控制协议的收敛性[66].随后,他们提出了一种基于双层网络的PI控制策略,用于解决受外部噪声干扰的异构多智能体系统的一致性问题,在这种策略中比例项和积分项分别部署在两个拓扑结构不同的网络层上[67].针对受定常数扰动干扰的异构线性多智能体系统的一致性问题,他们设计了具有自校正自适应增益的分布式PI 控制协议[68].对于有向多智能体系统的一致性协议设计问题,段志生教授等通过设计分布式PI控制协议,给出了系统实现一致性的判别准则和控制协议参数选择的充分条件[69].进一步,他们通过引入虚拟的领导者,设计了分布式自适应PI 控制协议,给出了领导-跟随一致性实现的充分条件[70].最近,郭雷院士等通过设计非耦合PID 控制协议,研究了一类高维二阶耦合不确定多自主体系统的跟踪问题,每个自主体仅利用自身的跟踪误差信息,分别对每个自主体设计不同的PID 控制器,从而实现系统的全局一致性[71].
课题组在基于PID 协议的集群系统协同控制方面进行了大量研究,取得了一定的研究成果[73−77].文献[73]探讨了含节点时滞的多智能体网络的同步及PID 控制器设计问题,给出了系统全局同步时,PI 和PD 控制器参数的设计方法.研究表明,网络的拓扑结构、内部耦合矩阵、节点动力学、时滞在含节点时滞的多智能体网络的同步中起着重要作用.文献[74]研究了具有非线性动态和有向拓扑的多智能体网络的全局同步及PID 控制协议设计问题,给出了全局同步的充分条件.为了探究PID 控制中积分项和微分项对网络同步性能的影响,分别设计了PI 和PD 协议对具有不同拓扑结构的有向动态网络(包括平衡强连通网络、强连通网络、含有向生成树的网络)进行了研究,建立了PID 协议与有向网络全局同步之间的联系.文献[75] 研究了含节点时滞的有向多智能体网络的协同控制问题,通过构造A矩阵,分别设计了PI 和PD 控制协议,给出了这类多智能体网络全局同步的充分条件.对于受噪声干扰的多智能体网络,文献[76] 通过设计PI 和PD 协议,给出了系统全局同步的判别准则及控制器参数设计方法,阐明了网络的拓扑结构、节点动力学、随机扰动、内部耦合矩阵和PID 控制增益之间的本质关系.针对随机耦合非线性多智能体网络,文献[77] 利用自适应控制方法探讨了这类网络的同步问题.根据智能体的状态信息,分别设计了基于节点和基于边的自适应PI 同步协议,给出了随机耦合多智能体网络在均方意义下同步的充分条件,揭示了网络的拓扑结构、随机耦合、节点动力学和PI 控制增益之间的定量关系.设计的自适应PI 控制协议结构简单且易于在未来实际工程中设计使用.
2.3 集群系统协同控制中的分布式观测器设计方法
在实际工程控制问题中,不是所有的状态信息都能直接获得,为了解决这个问题,常用的做法是设计系统的状态观测器,利用观测到的输出信息近似地估计系统的状态信息.传统的集中式观测器设计中,需要获得系统状态的全部输出信息,但对于大规模的集群系统而言,由于传感器观测能力的限制,每个观测器通常只能获得系统状态的局部输出信息,因此,需要部署大量的传感器来观测系统的状态,从而造成集中式观测器面临巨大的存储压力,这使传感器网络上的分布式观测器算法为解决集群系统协同控制问题提供了强有力的工具.
观测器作为控制输入的集群系统通常描述为
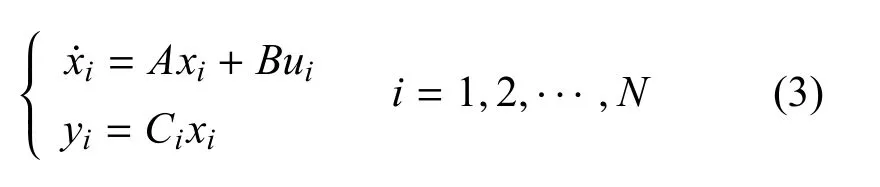
其中,xi∈Rn是系统的状态变量,yi∈Rmi是系统的输出变量,A∈Rn,B∈Rn,Ci∈Rmi×n是系统矩阵,ui∈Rn是控制输入.分布式观测器设计为
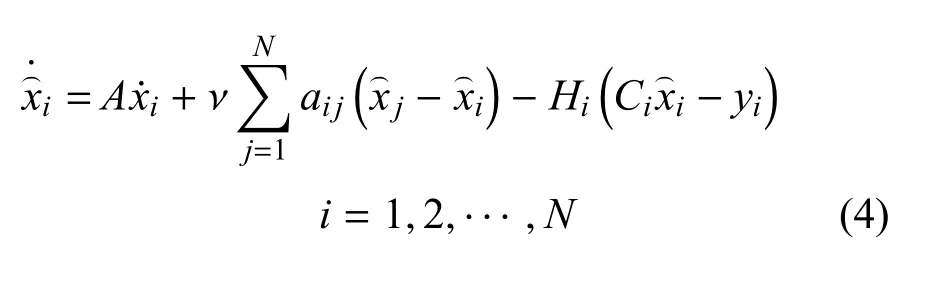
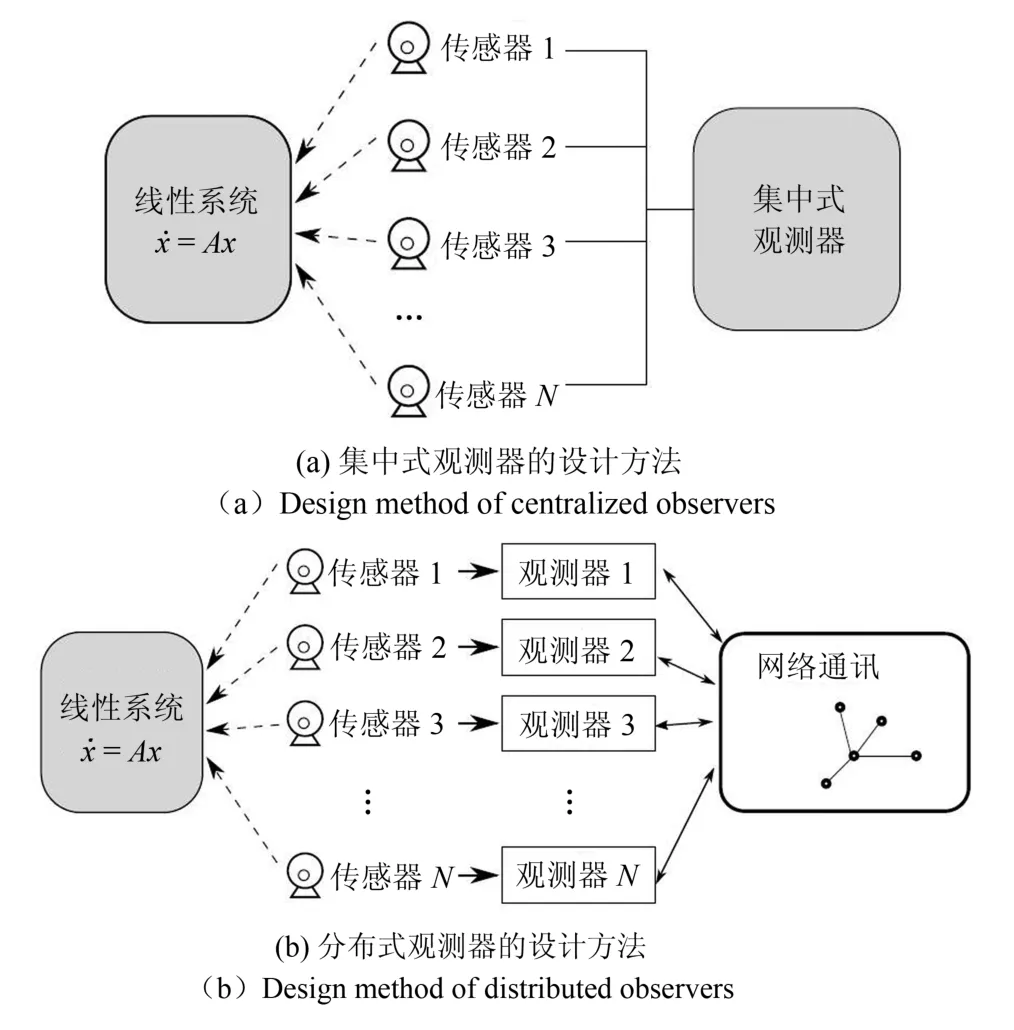
图4 两种观测器设计方法的区别Fig.4 The difference between two observer design methods
观测器的设计问题是控制理论与控制工程研究中的一类重要问题.有关观测器设计问题的早期研究工作可追溯到1964年Luenberger 发表在IEEE Transactions on Military Electronics 的论文[78].此后,研究者对观测器设计问题进行了大量研究,产生了多种类型的观测器设计方法,如鲁棒自适应观测器设计[79−80]、T-S 模糊系统观测器设计[81]、高增益观测器设计[82]等.2007年Olfati 教授等利用分布式Kalman 滤波的思想,研究了一类连续时变系统的分布式观测器设计问题,给出了分布式观测器结构的具体形式,但这种观测器参数的求解需要依赖于复杂的Riccati 方程[83].2012年,Li 等研究了多智能体系统的协同控制问题,设计了基于观测器的一致性协议算法,分析了算法的收敛性,给出了一致性实现的参数设计方法[84].随后,Lewis 教授等研究了离散同构多智能体系统的一致性问题,通过引入分布式收敛域的概念,提出了协同式观测器和控制器设计方法,并验证了所设计观测器的鲁棒性[85].2014年,段广仁院士等针对连续时间和离散时间多智能体系统,设计了一种截断型降阶观测器,解决了系统动力学开环且不是指数稳定情况下的多智能体系统的一致性问题[86].
针对基于分布式观测器设计的集群系统输出调节问题,2012年Su 等提出了动态通信网络下分布式观测器的设计方法,通过设计外系统的分布式观测器,解决了线性多智能体系统的协同输出调节问题[87].随后,他们将相关结果推广到了切换网络情形,通过设计动态状态反馈控制器和测量输出反馈控制器,解决了多智能体系统的领导-跟随一致性问题[88].2015年Liu 等通过设计分布式观测器,解决了含有任意大有界扰动的异构不确定多智能体系统的分散式鲁棒输出调节问题,并分析了分布式观测器设计算法的收敛性[89].上述研究中分布式观测器的设计需要部分个体获得外部扰动的信息.在不需要个体获得外部扰动信息的情况下,2016年Seyboth 教授等给出了全局和局部扰动情形下的分布式输出调节问题的设计算法,解决了线性多智能体系统的协同控制问题[90].
课题组在集群系统分布式观测器设计方面进行了大量研究,取得了一系列研究成果[91−95].文献[91]研究了两类典型连续时间多智能体系统的分布式观测器设计问题,在网络拓扑无向连通的情况下,给出了分布式观测器达到渐近全能的充分必要条件;针对强连通网络和含有向生成树的网络,给出了分布式观测器设计方法,以及反馈增益矩阵和网络耦合强度的设计算法.为了克服高维系统集中式观测器的通信瓶颈问题,文献[93] 构建了基于分布式观测器的连续时间LTI 系统的镇定问题框架,给出了几类典型有向网络协同镇定的充分条件以及参数设计算法.针对集群系统中智能体只能获得局部输出信息及网络中存在通信时滞约束的情形,文献[94] 研究了含有任意大通信时滞的分布式观测器设计问题.基于低增益反馈和协同式控制方法,通过设计网络化观测器,使得每个观测器都以指数速度渐进跟踪系统的状态,从而避免了使用积分型预测控制器引发的系统数值算法不稳定问题.文献[95] 研究了含有外部扰动的线性时不变系统的协同输出调节问题,基于网络化系统的内模原理,设计了分布式状态观测器和扰动观测器,每个观测器只能获得一部分量测输出,通过不同个体间的相互作用实现对系统状态的观测,分别给出了在固定网络拓扑和时变网络拓扑下参数设计算法及实现输出调节的条件.
3 未来发展趋势
“需求牵引、技术推动”是人类社会文明进步的不竭动力.集群系统协同控制技术的广泛应用,必将对社会生产生活方式产生深刻的变革.展望集群系统协同控制对新时代智能控制技术的发展,藉以重塑我们所面临的诸多机遇和挑战.任务多样性、通信复杂性以及环境不确定性,决定了集群系统协同控制技术势必朝着自主化、智能化、最优化、网络化和安全化方向发展.这些发展趋势值得我们关注和进一步研究.
1)集群系统协同控制“自主化”.未来集群系统不仅局限于底层控制,更多的是与信息层、决策层、链路层相结合,从而实现协同感知-自主决策-动态组网集群控制一体化,实现任务分配-路径规划-自主控制一体化.随着集群系统载荷计算能力的迅速增强,利用网络结构耦合设计的智能协同算法,能够有效提升集群系统的自主协同能力,有助于在实际工程系统中应用.
2)集群系统协同控制“智能化”.智能控制能够提升系统的控制性能,人工智能技术的发展为研究集群系统协同控制提供了新思路.基于新一代人工智能技术构建协同控制框架,使集群中的个体在局部感知能力下,通过集群数据链技术,实现复杂的群体行为,充分激发群体间的智能是未来协同控制技术的发展趋势.
3)集群系统协同控制“最优化”.集群系统的某些性能指标达到最优是实际控制场景的需求.优化技术与集群系统相结合,产生了集群系统的分布式优化与协同博弈技术,支撑了大规模集群系统的协同控制,为集群智能的涌现提供了保障.基于分布式优化方法的协同控制是集群系统智能化的未来发展趋势.
4)集群系统协同控制“网络化”.网络化通信是集群控制的重要信息层保障,目前集群系统协同控制研究中未充分考虑通信层的影响.快速组网技术在实现复杂高动态环境下的协同控制中起着至关重要的作用,为了使控制层与信息层更好地匹配,提高协同控制性能,实现协同感知-通信匹配-快速组网-集群控制一体化是未来集群系统研究的重要方向.
5)集群系统协同控制“安全化”.安全性是集群系统协同控制任务实现的关键因素,对系统的控制和决策起到保护作用.在现有集群系统协同控制基础上,通常采用故障诊断与容错控制、干扰抑制与信息补偿等方式解决单一的攻击或防御问题.在集群系统的框架下,实现攻击和防御的协调统一是协同控制未来发展的趋势.
通过对集群系统协同控制技术研究、分析,发现各类问题虽然已有许多行之有效的解决方法,但仍存在诸多不足.将人工智能领域出现的新技术、新方法引入到集群系统协同控制研究中,对提升集群系统的自主化、智能化、最优化、网络化、安全化程度起着重要的推动作用.
4 结论
本文首先介绍了集群系统协同控制的研究背景及研究意义;其次探讨了集群系统协同控制方面的研究进展,针对集群系统具有大规模、复杂性、分布式、信息不完备的特征,从牵制控制、PID 控制、分布式观测器设计等方面阐述了集群系统的协同控制问题;最后给出了集群系统协同控制技术面临的挑战及未来发展趋势,以期为读者提供进一步的思考与研究.
