基于光学相干测振系统的微悬臂梁缺陷检测
2021-04-12贾美英钟舜聪林杰文张秋坤
贾美英,钟舜聪,2,周 宁,林杰文,张秋坤
(1.福州大学 机械工程及自动化学院,福建 福州 350108;2.福州大学 医疗器械和医药技术重点实验室,福建 福州 350108)
引言
结构在运行过程中易受到众多因素影响导致微裂纹、微孔洞等缺陷不断萌生和扩展,损伤的累积将影响其正常工作甚至使结构整体失效[1]。因此,需要通过有效的方法监测结构健康状况从而及时发现缺陷。现阶段常见的结构缺陷检测方法是基于振动响应特性进行分析识别的[2-3],若结构出现损伤,其模态参数如固有频率、振型等也会随之发生变化,其中最容易监测获得的参数是固有频率[4]。然而固有频率往往只能反映结构整体特征,对缺陷位置的局部信息敏感度不够,且识别缺陷时必须先获得结构无缺陷时的固有频率,这在工程上难以实现[5]。Zhong 等人[6]提出了一种利用附加质量块进行缺陷检测的新方法,在缺陷梁上添加质量块放大缺陷对固有频率的影响。
光学相干测振(OCV)方法是一种基于低相干光干涉原理的新型光学非接触式振动测量技术,具有成本低、测量精度高、无损等优点,能够很好地满足精密振动测量要求。目前,国内外关于光学相干测振的研究已取得了阶段性的进展和成果[7-9]。本研究应用自搭建的光学相干测振系统对微悬臂梁进行振动检测和模态分析,在对干涉光谱信号处理得到固有频率的过程中,采用FFT+FT细化频谱校正算法[10-11]进行误差校正,频率分辨率可提高1 000 倍以上,使OCV 系统对振动位移的测量精度达到纳米量级。同时,结合附加质量法对微悬臂梁进行检测分析得到其缺陷信息,实现了运用光学相干测振系统对微小型结构的缺陷检测。
1 光学相干测振系统原理
OCV 系统原理如图1 所示,系统主要由迈克尔逊干涉仪和光栅光谱仪2 部分组成,分别用于生成和采集包含被测振动结构时域位移信息的干涉光谱信号。采用超辐射发光二极管(EBS300003-01, Exalos)作为光源,发出的光经准直器准直为平行光后由分光镜(50:50)分成2 束能够发生干涉的光,一束到达参考臂;一束到达样品臂即待测振动结构。其被反射后在分光镜处再次汇聚成一束光。到达参考臂和样品臂的2 束光经分光镜分开至再次汇合所经历的光程不同,当两者光程差在相干长度范围内时产生干涉现象,样品臂的位置随振动发生改变进而产生不同的干涉光。生成的干涉光经反射镜反射至反射光栅(1 800 线/mm),光栅将干涉光按波长分开,再由柱透镜(f=75 mm)聚焦到高速线阵相机(P4-CM-04K10D, Teledyne DALSA)表面,采集一段时间内的干涉光即可得到一张携带振动结构位移信息的二维动态干涉光谱图。

图1 光学相干测振系统原理图Fig.1 Schematic diagram of optical coherence vibrometer system
在光学相干测振系统中,干涉光谱是相机每个像素点记录的t时刻对应于波长 λi的干涉光强E(λi,t),可表达为[8]
式中: λi为相机第i个 像素点探测到的光源波长;t为时间;Er(λi,t)和Es(λi,t)分别为t时刻参考臂和样品臂反射光的光强;φ(λi,t)为参考臂和样品臂2 束光发生干涉后每一个波长 λi在t时 刻的相位;n为光在传播介质中的折射率,空气中为1;Δz(t)为参考臂和样品臂2 束光之间的光程差。相机在某一时刻采集到的干涉光谱信号按正弦振荡的方式展开,振荡次数随光程差的变化而改变,利用傅里叶变换可以求取不同时刻干涉光谱信号的振荡次数,即可得到不同时刻振动结构位置信息,进而构建出被测结构的时域位移信号,对时域位移信号进行一次傅里叶变换就能够获得被测结构的模态频率信息。
系统的最大振动位移量程L=/4δλ,所能测量的最大振动频率fmax=λ0/4πaΔt,其中 λ0为中心波长, δλ为光谱仪的光谱分辨率,a为振幅, Δt为相机曝光时间。以本文搭建的OCV 系统所用器件为例, λ0=870 nm, δλ=0.073 5 nm,a=50 nm, Δt=10 μs,代入公式计算可得本系统的最大振动位移量程为2.574 mm,所能测量的最大振动频率为138.5 kHz。
光学相干测振系统通过对干涉光谱信号做傅里叶变换实现对结构的时域振动位移测量,但由于傅里叶变换对有限信号进行处理时存在能量泄露的问题,使所得位移信息存在较大的误差。为提高结构振动信息和模态频率的检测精度,本文采用FFT+FT 细化频谱校正算法[10]对傅里叶变换的结果进行校正。
利用Matlab 生成如(3)式所示的信号,取采样频率为1 024 Hz,做1 024 点的傅里叶变换,频率分辨率为1 Hz。通过FFT+FT 算法分别对其进行1 000倍和10 000 倍的细化谱分析。分析及校正结果见表1,可以看出,谐波信号加窗细化谱的频率误差小于0.000 1 个频率分辨率,在达到一定细化倍数时,误差甚至降为0,与传统FFT 方法相比,精度可提高到原有分辨率的1 000 倍以上。

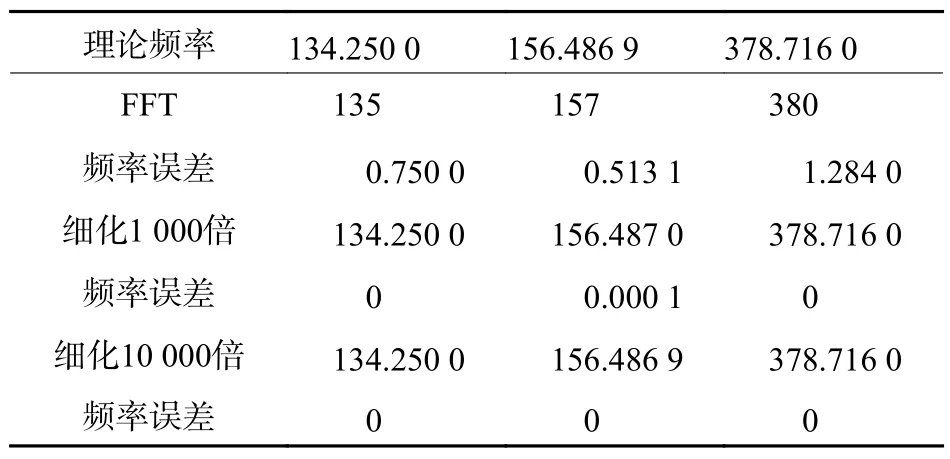
表1 FFT+FT 细化频谱校正结果Table 1 Results of FFT and FT refinement spectrum correction Hz
以压电陶瓷(piezoelectric ceramic transducer,PZT)为被测样品臂结构,应用自搭建的OCV 系统对其进行振动测量,利用函数信号发生器(UTG-1402,UNI-T)产生正弦信号驱动PZT 振动,加载4 V、20 Hz 的正弦信号驱动其产生40 nm 的位移,采用只做傅里叶变换和结合频谱校正的方法对采集到的干涉光谱信号进行处理。如图2 所示为测量所得的时域振动位移结果,可以看出只做傅里叶变换无法检测到其振动位移信息,而经过频谱校正可以精确地测量到纳米量级的振动位移。这表明,采用FFT+FT 细化频谱校正可使OCV 系统的位移测量精度由微米量级提升到纳米量级。

图2 纳米量级的振动位移测量结果Fig.2 Results of vibration displacement measurement at nanometer scale
2 实验研究及结果分析
如图3 所示的等截面等密度悬臂梁,在距离固定端lc处有1 条深度为hc的裂纹,将1 个质量为m的质量块置于梁上距固定端lm处,由文献[12]可知,当附加质量块在悬臂梁的不同位置时,梁-质量块耦合结构的固有频率会发生变化。若梁不存在缺陷,质量块从固定端等间隔移动到自由端得到的频移曲线为光滑的曲线;若存在缺陷,由于质量块的存在会放大缺陷对结构固有频率的影响,在缺陷位置处频率会发生微小突变,所以得到的频移曲线为不光滑的曲线。因此,通过检测耦合结构固有频率频移曲线中的不连续点或者突变点即可对结构的缺陷进行定位[13],从而实现对缺陷的检测。

图3 含缺陷悬臂梁-附加质量块耦合结构模型Fig.3 Model of defective micro-cantilever beams with additional mass-block coupled structure
与梁结构固定端的距离lc= 20 mm;选择质量m=0.054 g 的附加质量块,质量块从其中心位置距梁结构固定端lm=1 mm 处等间隔地移动到lm=56 mm处,移动间隔为1 mm。
本研究采用OCV 系统对含有缺陷的微悬臂梁-附加质量块耦合结构的固有频率进行测量,同时通过有限元模拟及电涡流传感器对比实验验证该基于光学相干测振系统检测微悬臂梁缺陷方法的可行性和准确性。系统实物如图4 所示,实验采用的微悬臂梁长、宽、高分别为60 mm,3 mm,0.5 mm;梁上有一圆形通孔缺陷,直径为0.5 mm,中心位置

图4 基于OCV 系统的微悬臂梁缺陷检测实验图Fig.4 Defect detection experiment of micro-cantilever beams based on OCV system
基于固有频率识别结构缺陷必须对被测结构进行振动激励,微悬臂梁无法使用传统的力锤激励,在对比各种激励方式后,本文决定采用声波对其进行激励[9,14]。实验通过函数信号发生器驱动扬声器产生正弦扫频声波信号激励微悬臂梁-附加质量块耦合结构,驱动电压为20 V,频率为0~1 000 Hz。耦合结构受激励产生的振动位移信息由OCV 系统采集,同时采用电涡流传感器(SE101-2,东华测试系统)进行同步测量,传感器通过支架安装在梁的另一侧,且中心位置与OCV 系统的探测光斑在同一高度。另外,OCV 系统和电涡流传感器的采样频率均设置为50 kHz。整个实验系统搭建在气动光学隔振平台上,并在测量过程中使实验室保持恒温恒湿,由此降低外界环境噪声及气流变化等因素对测量结果的影响。
附加质量块每移动一次位置,OCV 系统和电涡流传感器就对耦合结构的振动信息采集一次。对OCV 系统采集到的干涉光谱图进行处理获得耦合结构的时域振动信号,而电涡流传感器由自带的动态信号采集系统直接输出为时域信号,对时域信号做傅里叶变换并进行FFT+FT 频谱校正即可获得质量块移动到不同位置时精确的耦合结构固有频率。由各个位置的固有频率进一步得到如图5(a)(b)所示的耦合结构前两阶固有频率频移曲线。
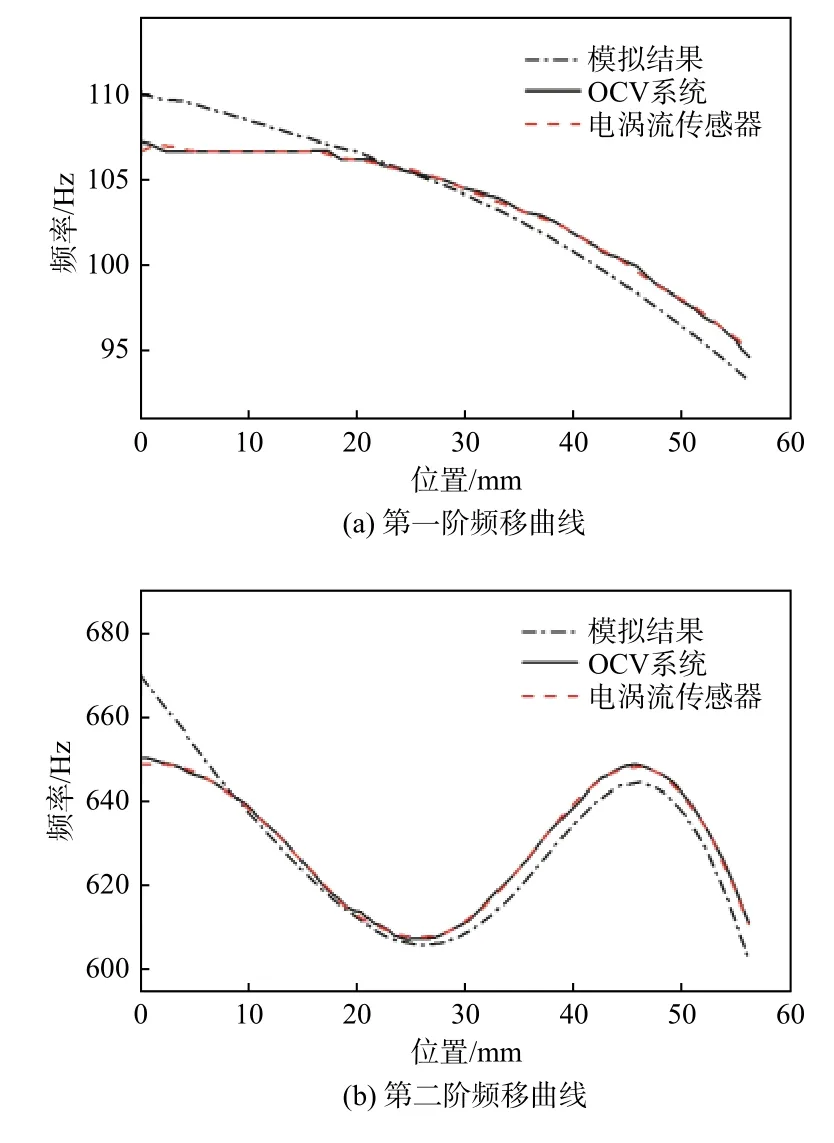
图5 耦合结构前两阶频移曲线Fig.5 The first two order frequency shift curves of coupled structure
图5 中实线、虚线和点划线分别为OCV 系统测量、电涡流传感器测量和模拟得到的含缺陷微悬臂梁-附加质量块耦合结构固有频率频移曲线。可以看出,OCV 系统能够准确地测量到耦合结构前两阶频移曲线,且曲线变化趋势与模拟及电涡流传感器测量的结果相同。此外,在OCV 系统检测的结果中可以发现频移曲线lm=20 mm 位置处存在突变现象,而在电涡流传感器同步检测到的结果中突变不明显。为了获得更加明显和精确的缺陷位置信息,将一二阶频移曲线叠加并对其进行平稳小波变换,小波变换得到包含梁缺陷位置信息的细节系数可以放大缺陷位置处的突变现象[15]。如图6(a)(b)所示为得到的耦合结构前两阶频移叠加曲线及其细节系数。可以发现OCV 系统检测得到的频移叠加曲线及其小波分解细节系数在lm= 20 mm 处都存在十分明显的突变现象,而电涡流传感器测量的结果没有明显的突变,这表明OCV 系统具有比电涡流传感器更高的测量精度,能够实现对微悬臂梁的缺陷识别。
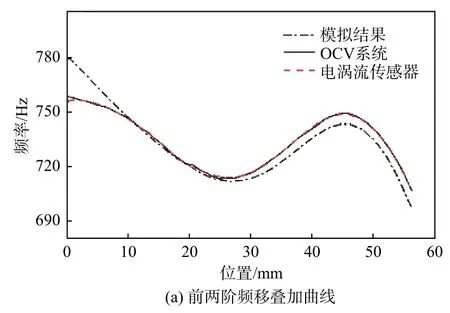

图6 耦合结构前两阶频移叠加曲线及其小波分解细节系数Fig.6 The first two order frequency shift superposition curves and its wavelet decomposition detail coefficients of coupled structure
3 结论
本文提出了一种基于光学相干测振系统的微悬臂梁缺陷检测方法。阐述了OCV 系统的振动测量原理,运用FFT+FT 细化频谱校正算法对干涉光谱信号进行处理以提高精度。运用OCV 系统和电涡流传感器测量系统对比实验证明了基于光学相干测振系统的微悬臂梁缺陷检测方法的可行性和准确性。本研究为微小型结构的缺陷检测提供了新的方法和研究思路,同时拓展了光学相干测振技术在工业领域的应用,具有十分广泛的工程价值。
