一种工作于长波红外波段的40×成像物镜设计
2021-04-12李锦程谢洪波孙毅轩
李锦程,谢洪波,杨 磊,陈 卉,孙毅轩
(天津大学 精密仪器与光电子工程学院,光电信息技术教育部重点实验室,天津 300072)
引言
随着红外成像技术的高速发展,红外成像系统对高分辨率成像和大范围探测的需求日益增大[1-3]。相较于可见光成像,红外成像拥有全天时工作、探测灵敏度高等优势[4]。通常来说,长焦系统拥有较小的视场和较高的空间分辨率,广角系统拥有较大的视场,但是空间分辨率较低[5]。为了同时具备长焦和广角的成像性能,需要设计变焦红外系统实现寻找目标和跟踪目标之间的功能切换[6]。
长波红外成像系统由于工作波长较长,其衍射极限分辨率相对较低,若要提高成像清晰度,必须减小其F数,增大系统的通光口径[7]。本文基于机械正组补偿法变焦理论,采用浮动光阑设计思路,在长焦结构中将光阑设置在前固定组的前表面,在广角结构中将光阑设置在变倍组和补偿组之间,在变焦的同时依靠光阑位置的变化来同时满足大孔径与高变倍比的要求,并保持了传统光学系统的简单一次成像结构[8]。
基于以上思路,本文设计了一款F数为1.2,变倍比为40×的长波红外成像系统,并对其进行了−40 ℃~60 ℃的消热差设计[9-10],适配于像元尺寸为12 μm、分辨率为640×512 pixel 的长波红外非制冷型探测器,系统截止频率为41 lp/mm。
1 理论基础
变焦系统的主要目的是通过调节焦距来改变成像放大率,从而进一步改变物方视野大小[11]。一般的变焦系统分为前固定组、变倍组、补偿组和后固定组4 个组分结构,通过改变4 个组分结构之间的相对位置来实现变焦功能[12]。当移动变倍组改变焦距时,像面会移动,需要运动组分对像面移动量进行补偿(即补偿组),从而使光学结构的共轭距始终保持不变[13]。
本文采用机械正组补偿法对整体光学系统进行设计[14],图1 为机械正组补偿式变焦系统的变焦原理图。在长焦状态时变倍组和补偿组间距最小,当系统的焦距从长焦移动到短焦时,变倍组和补偿组的距离慢慢增大,起到变焦与固定像面的作用。一般情况下,变倍组的运动是线性的,补偿组的运动是非线性的[15]。
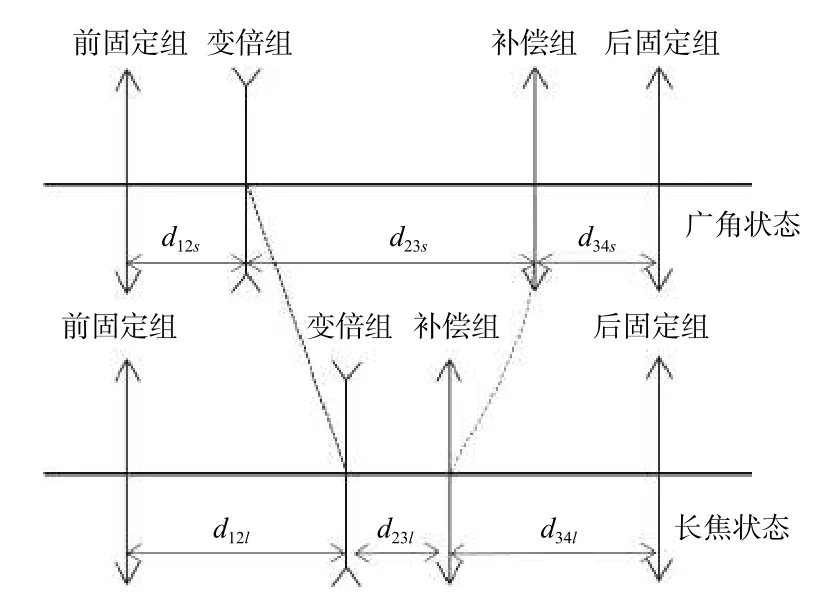
图1 机械正组补偿式变焦系统变焦原理Fig.1 Principle of mechanical positive compensation zoom system
在设计机械正组补偿式变焦系统时,通常将长焦状态的参数作为初始参量,并求解系统的主要结构参数[16]。首先,确定长焦状态下的变倍组放大率m2l、变倍组和补偿组间距d23l、 补偿组焦距f3′,并将f2′归一化为−1。前固定组焦距f1′和补偿组焦距f3′可表示为
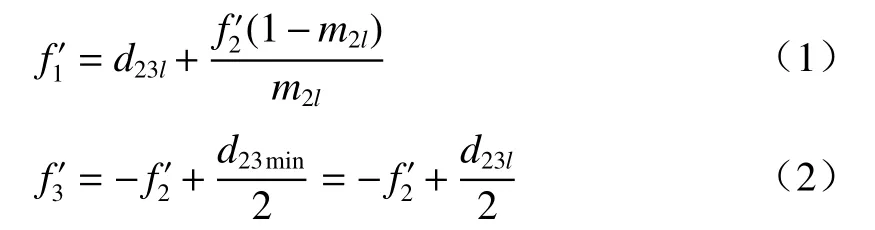
此时,长焦状态下的补偿组放大率m3l的表达式为


然后根据移动量为q时的补偿组实时放大率解m31和m32,求出此状态下系统的变倍比:

最终求出系统总长度:

式中:d12s为短焦状态下变倍组和前固定组之间的距离;|q|max为变倍组的最大移动量;|Δ|max为补偿组的最大移动量;d34s为短焦状态下补偿组和后固定组之间的距离。
以上参数求解完成后,需要合理进行各组分之间的镜片数量分配,将以上参数的取值或关系式写入到光学设计软件的评价函数中,并插入像质约束条件,最终完成光学系统的优化设计。
2 选型与优化
2.1 设计参数
变焦系统采用像元数为640×512 的长波红外非制冷型焦平面探测器,探测器像元尺寸为12 μm。变焦物镜设计参数如表1 所示。

表1 设计参数Table 1 Design parameters
2.2 设计过程
本文采用机械正组补偿法对系统的初始结构进行计算,因此选择工作于长波红外波段的长焦镜头作为初始结构,并且结合系统设计参数对其孔径、视场和像面尺寸(焦距)进行优化,最终优化得到的长焦镜头如图2 所示。初始结构由6 片透镜组成,孔径光阑位于第一片透镜前10 mm 处,像方F数为1.2,视场为2.4°,像面尺寸为9.835 mm,满足最终设计的变焦物镜的长焦结构要求。

图2 初始结构(长焦状态)的3D 示意图Fig.2 3D diagram of initial structure (telephoto state)
在初始结构满足长焦状态的设计要求后,需要对其进行组态划分。本系统采用机械正组补偿法进行优化设计,组态划分条件为

式中φ1∼φ4分别代表前固定组、变倍组、补偿组和后固定组的光焦度。依据上述原则,将透镜1 设置为前固定组,透镜2 和透镜3 设置为变倍组,透镜4 设置为补偿组,透镜5 和透镜6 设置为后固定组进行变焦改造。对初始结构合理划分组态之后,添加4 个组态的光焦度约束,再次优化得到满足机械正组补偿法变焦原理的长焦系统。
保持变倍组的变量不变,获得此状态下的变倍组放大率m2l、变倍组和补偿组间距d23l以及变倍组焦距f2′,并将f2′归一化为−1。通过(1)式~(3)式优化获得此状态下的前固定组焦距f1′、补偿组焦距f3′与补偿组放大率m3l。我们根据(4)式和(5)式的反复迭代计算获得变倍组的最大移动量q,根据(5)式中变倍比计算公式,反推得到满足系统变倍比条件Γ ≥40时的变倍组最大移动量q的取值范围,然后根据(4)式计算出补偿组的移动距离范围 Δ。
在计算出各个参数的取值范围之后,将其添加到评价函数中,对系统设置多重组态,添加广角状态视场,优化广角结构。将广角结构中的光阑设置在变倍组和补偿组之间,并添加光阑位置为变量进行优化。在机械正组补偿结构中,变倍组和补偿组之间的距离变量范围是最大的,光阑设置在此处具有最大的位置优化范围。除此之外,将光阑设置在变倍组和补偿组之间,光阑左右两侧的镜片数量相近,有利于优化广角结构中的像差。长焦状态的二次优化参数约束如表2 所示。

表2 初始结构(长焦状态)的二次优化参数约束Table 2 Parameters constraints by quadratically optimizing in initial structure (telephoto state)
在优化得到广角状态的结构之后,根据(6)式可得广角状态下的系统总长度,并以此作为系统的最大总长度约束。至此,变焦系统的初始结构已经优化完成,接下来在长焦和广角状态之间再次添加多个组态,进行连续变焦设计。
首先确定在变焦过程中浮动光阑位置变化的临界点。无论是长焦结构还是广角结构,为了使光线在系统中平缓追迹,一般使系统第一片透镜的孔径处于最大值。由于4 个组态中只有变倍组为负透镜,在变焦过程中,仅仅补偿组中透镜5 的最大孔径可能超过系统第一片透镜的孔径,因此可降低光线追迹的平缓度。若将浮动光阑放置于系统第一片透镜前10 mm 距离处,则在系统由长焦状态过渡到广角状态的过程中,第一片透镜的尺寸表示为

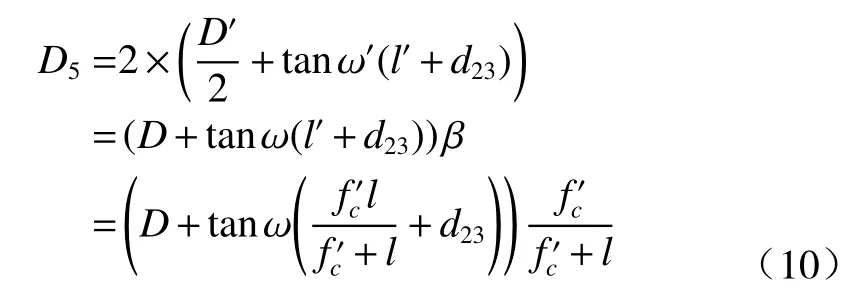
假设前固定组和变倍组的组合系统焦距为fc′,光阑相对于组合系统的物距为l,则可以根据高斯公式求出组合系统的角放大率 βc以及光阑对组合系统所成的像D′的 位置l′:

则透镜5 的尺寸可表示为
当透镜5 的尺寸大于第一片透镜的尺寸时,为了调整系统中光线追迹的平缓度,将孔径光阑的位置由第一片透镜前改变到变倍组与补偿组之间,如图3 所示。

图3 浮动光阑设定位置的临界状态Fig.3 Critical state of setting position of floating diaphragm
从图3 可知,在系统的视场为5.6°时,将孔径光阑放置在第一片透镜前,补偿组透镜的尺寸与第一片透镜的尺寸相同,光线追迹的趋势不再平缓,后固定组的第一片透镜出现半球面的状况。将浮动光阑的位置改变到前固定组与变倍组之间后,光线追迹的过程变回平缓的状态,各个透镜的外形尺寸符合加工生产要求。
在进行连续变焦设计的过程中,取消表2 中的参数约束,因为此参数约束是基于理想高斯光学计算出来的,与最终的系统数据有一定差异。此外,可以适当更改各个组态中的镜片数量,使每个组态中的镜片材料尽可能不同,便于后续的消热差设计。在利用Zemax 光学软件对变焦物镜进行多次变焦优化之后,最终得到了一款应用于长波红外波段、高分辨率高倍率的变焦物镜。变焦物镜在不同有效焦距(effective focal length,EFL)处的3D 结构图如图4 所示。
从图4 可知,变焦系统共使用9 片镜片,透镜1 和透镜2 为前固定组,透镜3 和透镜4 为变倍组,透镜5 为补偿组,透镜6~9 为后固定组,总长度为300 mm。除了一般长波红外成像系统使用锗(Ge)、硫化锌(ZnS)和硒化锌(ZnSe)材料之外,本变焦物镜还引入了HWS 系列红外硫系玻璃,以方便后续消热差设计。为了减小设计难度,本变焦物镜采用浮动光阑设计,长焦结构的光阑位于前固定组的前表面,广角结构的光阑位于变倍组和补偿组之间。

图4 变焦物镜的3D 结构图Fig.4 3D structure diagram of zoom objective lens
2.3 像质评价
长波红外成像系统的衍射极限较低,因此其成像质量需要接近衍射极限。本变焦物镜采用的非制冷型焦平面探测器的像元尺寸为12 μm,截止分辨率为41 lp/mm。变焦物镜在不同有效焦距处的MTF(modulation transfer function)曲线如图5 所示,焦距在5.86 mm~234.76 mm 范围内变化,变焦物镜各视场的MTF 曲线均接近衍射极限,在41 lp/mm处的MTF 模均大于0.2,在焦距连续变化时保持像质良好稳定。

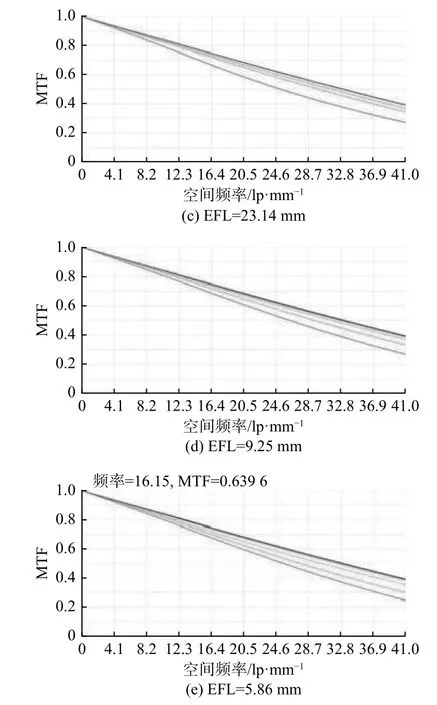
图5 变焦物镜的MTF 曲线图Fig.5 MTF curves of zoom objective lens
在变焦过程中,随着系统由长焦镜头向广角镜头过渡,畸变量也会随之增加。经过优化设计,变焦物镜在长焦状态下畸变<5%,广角状态下畸变>−10%,不同焦距处的畸变图如图6 所示。
2.4 消热差设计
长波红外材料的温度敏感度较高,当使用环境的温度发生变化时,透镜的光学参数会随之发生变化,使实际成像位置与理想像面发生偏离,从而产生离焦问题,所以需要对物镜进行消热差设计。
系统使用不同红外材料的主要性能如表3 所示。在消热差设计过程中,为了达到同时消像差与消热差的目的,尽可能使材料的折射率与组分结构的光焦度相匹配,在需要较高光焦度的组分结构中使用锗等高折射率的材料,在需要较低光焦度的组分结构中使用硫化锌等低折射率的材料。例如,锗的折射率最大,所以将其应用在类似变倍组这样高光焦度的组分结构中。由于锗具有较小的热膨胀系数和较大的温度系数,而红外硫系玻璃HWS6 的性质刚好相反,具有较大的热膨胀系数和较小的温度系数,所以将两种材料相配合使用,可以互相补偿由于温度变化所产生的热差。

图6 变焦物镜的畸变图Fig.6 Distortion diagram of zoom objective lens

表3 不同红外材料的主要性能参数Table 3 Main performance parameters of different infrared materials
考虑到不同材料对温度的感应曲线不同,每一个组分结构中都采用多种材料,使不同材料所引起的热差相互补偿。若同一组分结构中拥有多片同种材料的镜片,则将其中某一片变为材料模型进行优化,利用MNIN、MXIN、MNAB、MXAB 等操作数来控制材料模型的折射率和阿贝数的变化范围。系统像质优化完后,再将材料模型转变为实体材料继续进行优化,直至实体材料替换完成。
经过反复优化迭代设计后,本变焦物镜无热化工作的温度范围为−40 ℃~60 ℃,满足温度工作范围的应用要求。系统处于不同温度下的最大视场RMS 光斑半径如表4 所示。工作温度在−40 ℃~60 ℃之间变化时,成像系统在不同焦距处的最大视场RMS 光斑半径均接近非制冷型探测器的像元尺寸,消热差设计达到了预期效果。

表4 不同温度下的最大视场RMS 光斑半径Table 4 RMS radius of light spot in maximum field of view with different temperatures
3 结论
本文基于机械正组补偿法,以长焦镜头结构为基础设计了一款长波红外波段变焦物镜,系统的总长度为300 mm,F数为1.2,变倍比为40×,焦距变化范围为5.86 mm~234.76 mm,并对其进行了−40 ℃~60 ℃的消热差设计。该成像物镜具有结构简单、分辨率高、变倍比大的优点,适配于像元尺寸为12 μm 的非制冷型焦平面探测器,可以应用于红外热成像仪、战场侦察系统、武器瞄准系统等军事领域,完成目标搜寻、目标定位和目标追踪等任务。
