基于N次图像旋转法的两平晶三面互检技术研究
2021-04-11
(南京理工大学 电子工程与光电技术学院,江苏 南京 210094)
引言
光学平面面形的相对测量结果受干涉仪参考平晶面形精度的影响,绝对检验技术能够分离出参考平晶的面形误差,实现平晶面形的高精度检测。G.Schulz 和J.Schwider 最早提出了三平板互检法,获取一条直径方向上的绝对面形分布[1],韩森等人在此基础上增加一次旋转测量,得到全面形分布[2]。三平板互检法在测量过程中需要更换参考镜,操作不便。继而发展出两平板绝对检验方法,主要包括伪剪切法[3-5]、旋转平移法[6-10]及两平板三面互检法[11-12]。Keenan 提出伪剪切方法,平移待测镜得到绝对面形偏差,再通过积分得到绝对面形分布,但是在平移过程中容易引入额外倾斜,无法重建待测波面的离焦和像散项[3]。Fujimoto 提出旋转平移法,在伪剪切方法的基础上增加一次旋转测量,重建了像散项误差,仍然不能恢复离焦项[6]。徐晨等人提出了两平晶三面互检的绝对检验方法,通过提前测量测试平晶的折射率非均匀性,结合Zernike 多项式得到绝对面形低频分布[11]。在此基础上,孙文卿分别从空域和频域使用图像旋转算法和快速傅里叶变换方法解算波面,此时图像旋转算法集中于低频波面的求解[12]。
本文采用基于N次图像旋转法的两平晶三面互检方法,对平晶的三维绝对面形进行求解,结果中包含了中频波段的面形误差。推导了算法的理论误差,仿真计算了虚拟旋转次数和算法精度之间的关系,通过优化旋转角度和增加虚拟旋转次数,降低了算法误差,提高了算法精度。分析了旋转角度、像素错位和平晶折射率非均匀性误差对检测精度的影响。
1 原理
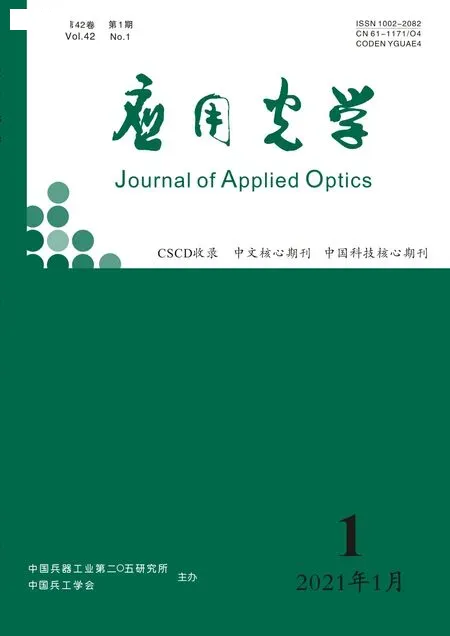
图1给出了两平晶三面互检法测量原理,平晶Ⅰ为参考平晶,平晶Ⅱ为测试平晶,这4次干涉测量可以用以下方程式表示:
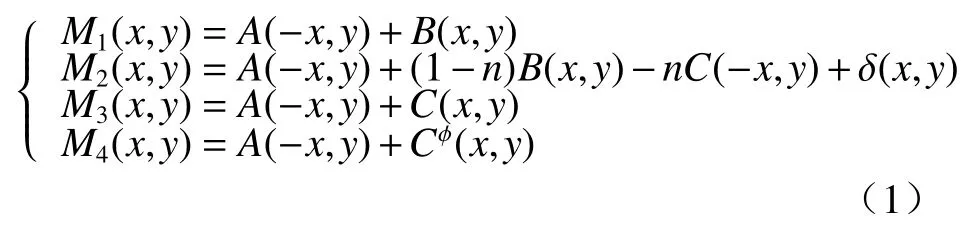
式中:Mn(n=1,2,3,4)为测得的波面数据;δ(x,y)表示平晶Ⅱ折射率非均匀性导致的偏差;n表示光学元件的折射率;[•]ϕ表示将波面绕光轴z旋转 ϕ角。
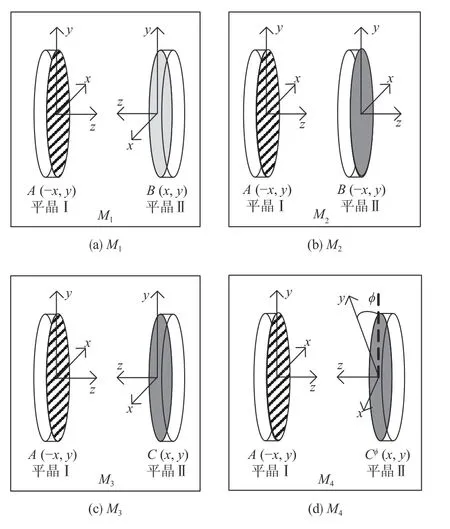
图1 两平晶三面互检法的原理图Fig.1 Schematic of two-flat crystal three-sided mutual test method
通常情况下,任意一个圆形光学元件的三维波面误差函数都能分解为旋转不变项和旋转变化项[13],将(1)式中的波面函数分解为旋转不变项和旋转变化项2 部分,此时根据(1)式的前3 项旋转不变项方程,可以直接求解出待测平晶绝对面形中的旋转不变项。
对于面形中的旋转变化项,可以采用N次图像旋转法求解。N次图像旋转法是基于Evans 提出的旋转平均法的思想[14],构造递推公式,利用M3和M4两次测量数据,对旋转变化项进行N次虚拟旋转。其中,等效最小旋转角度φ为实际旋转角度ϕ与360°的最大公约数,虚拟旋转次数
定义旋转变化项序列Pj(0 ≤j≤N),其中P0为M3的旋转变化项,P1为M4的旋转变化项,并利用迭代法构造出该计算序列的递推公式:

式中:[•]θ表示波面数据中与旋转角度θ有关的旋转变化项,将待测波面C的旋转变化项Cθ用极坐标Zernike 多项式表示(m≠0),并对前N项进行叠加平均:

使用欧拉公式对其中的余弦项和正弦项进行化简求和,当m≠kN(k=1,2,3······)时,(3)式中的余弦求和项与正弦求和项均为0,只剩下kNθ项,并记作CkNθ,因此旋转平均的结果可以记作:

当忽略kNθ项误差时,可以得到待测波面的旋转非对称部分,其中kNθ项与旋转次数N密切相关,即N次图像旋转法的理论误差。将求解的旋转不变项和旋转变化项相加,得到待测平晶的绝对面形分布。
2 仿真分析
本文以150 mm 口径平晶的实测表面数据作为原始波面数据,对N次图像旋转法进行仿真计算,将原始波面记为A、B和C,根据两平晶三面互检法的测量步骤,翻转、旋转和叠加运算后得到4次测量结果,并根据N次图像旋转算法进行求解。
根据现有文献可知[15],在平晶绝对检验中旋转角度常取54°,此时等效最小旋转角为18°,图像虚拟旋转次数为20次,原始波面、计算波面及计算波面与原始波面点对点相减得到的残差波面的PV、RMS值由表1给出。计算波面的PV值和RMS值数据也与原始波面基本一致,残差波面的PV值为2 nm,仅为原始波面PV值的3.33%;残差波面的RMS值为0.179 nm,仅为原始波面RMS值的4.15%。

表1 两平晶三面互检中旋转角度为54°时的各波面数据Table1 Wavefront data at 54 ° rotation angle of two-flat crystal three-sided mutual test nm
尽管54°被论证为光学实验中采用Zernike 多项式法进行面形恢复的最佳角度[16],但是N次图像旋转法的理论误差kNθ项与旋转次数密切相关,虚拟旋转次数越多,算法的理论计算精度越高,本文将针对N次图像旋转法中的虚拟旋转次数N进行仿真分析。
N次图像旋转法中的旋转次数与等效最小旋转角有关,根据等效最小旋转角的定义,旋转次数的取值范围为360°的24组公约数。表2为部分旋转次数下的残差波面的PV值和RMS值。图2给出了旋转次数和残差波面RMS值之间的关系,当旋转次数小于40次时,残差波面的RMS值随着旋转次数的增加而大幅度下降,当旋转次数大于40次时,残差波面的RMS值下降趋势趋于平缓。

表2 N次图像旋转法的不同旋转次数下的残差波面数据Table2 Residual wavefront data with different rotation times nm

图2 N次图像旋转法中旋转次数与残差波面均方根值的关系Fig.2 Relationship between rotation times and RMS of residual wavefront
图3为旋转角度分别为48°、54°和63°时的残差波面,面形分布呈螺旋对称状,对应的虚拟旋转次数N分别为15次、20次和40次,随着虚拟旋转次数的增加,残差波面的RMS值逐渐下降,并且残差波面的中高频成分增多,符合理论误差kNθ项的规律。同时随着旋转次数的增加,计算机内的波面旋转插值误差不断累积,导致边缘误差不断增大,并且计算时间大幅增加,但是提高的精度有限,因此旋转次数并不能取值过大。综上所述,本文选取63°为优化旋转角度,当旋转角度由54°优化为63°时,图像的虚拟旋转次数N由20次增加为40次,计算精度由0.179 nm 降低到0.141 nm,提高了图像旋转算法的精确度。
图3 48°、54°和63°不同旋转角度下求解的残差波面Fig.3 Residual wavefront at different angles:48°,54° and 63°
3 实验
使用ZYGO GPI XP型斐索干涉仪进行N次图像旋转法的两平晶三面互检实验研究,实验装置如图4所示。该干涉仪的工作波长 λ=632.8 nm,CCD的分辨率为640 pixel×480 pixel,利用扩束系统将干涉仪的有效口径扩展至Ф150 mm。参考平晶为ZYGO 干涉仪自带的标准平晶(平晶Ⅰ),测试平晶为一块自制的融石英标准平晶(平晶Ⅱ),将平晶Ⅰ的工作面、平晶Ⅱ的2个表面分别记为A、B 和C。实验中干涉腔用封闭罩隔离,避免气流与温度波动的干扰,干涉腔内的温度为20.2℃,湿度为51.8%,干涉腔长为80 mm。

图4 实验装置图Fig.4 Schematic diagram of experimental device
实验过程中进行4次干涉测量,分别是:1)表面A与表面B的干涉,2)表面A与表面C的干涉,3)表面A 在平晶Ⅱ绕y轴翻转180°后与表面C的干涉,4)表面A 在平晶Ⅱ绕z轴逆时针旋转 ϕ角后与表面C的干涉。具体得到的4次测量波面如图5所示,其中第2次测量中测试光束需要透过平晶Ⅱ,图5(b)的波面数据因为折射率非均匀性而引入波差,因此需要对待测平晶进行折射率非均匀性测量并将其消除。
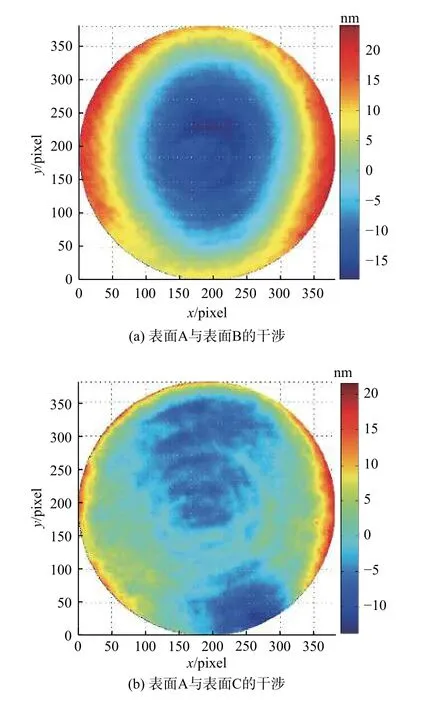

图5 两平晶三面互检实验的测量波面Fig.5 Measured wavefront of two-flat crystal three-sided mutual test
在ZYGO 干涉仪上采用绝对测量法[17]对折射率非均匀性进行测量,并在测量过程中应尽量保持平晶Ⅱ的位置姿态与绝对检验实验中一致,减小位置误差对测量结果的影响。图6为计算得到的折射率非均匀性引入的波面误差,PV值为0.051λ,RMS值为0.005 4λ,平晶Ⅱ的厚度d为30 mm,折射率非均匀性引入的波差是光程差信息,折射率非均匀性的标准评价参数

图6 Ф150 mm 平晶Ⅱ的折射率非均匀性波差分布Fig.6 Heterogeneity wave-aberration distribution of refractive index of Ф150 mm flat-crystal Ⅱ
将测试平晶的折射率非均匀性波差扣除后,利用基于N次图像旋转法的两平晶互检程序进行计算,得到的绝对面形分布如图7所示。

图7 N次图像旋转法恢复的的绝对面形分布图Fig.7 Absolute surface shape distribution recovered by Nposition image rotation method
为了验证实验结果的准确性,提取平晶Ⅱ前表面B水平和垂直方向2条直径上的绝对面形,与传统三平晶互检法得到的2条轮廓线上的绝对面形分布进行对比。如图8所示,N次图像旋转法的正交直径上的轮廓分布与传统三平晶法结果吻合良好,轮廓的起伏走向基本一致,如表3所示,PV值偏差低于2.3 nm,RMS值偏差小于0.5 nm,证明了N次图像旋转法的两平晶三面互检方法的可靠性。

图8 Ф150 mm 平晶水平垂直方向轮廓线上的绝对面形对比Fig.8 Comparison of absolute surface shape on horizontal and vertical profiles of Ф150 mm flat-crystal

表3 绝对检验恢复的Ф150 mm 平晶水平垂直轮廓线数据对比(单位:nm)Table3 Comparison of horizontal and vertical profiles data of Ф150 mm flat-crystal
4 讨论
4.1 旋转误差
实验过程中被测平晶进行机械旋转时,会存在一定的旋转角度误差,影响旋转角度的准确性。在理论旋转角度63°上叠加额外的角度偏差作为实际旋转角度,进行数值模拟分析,以实际角度下的残差波面相对于理论角度下残差波面的PV值和RMS值偏差作为平晶旋转角度误差对测量结果影响的评价指标。如图9所示,由于存在边缘旋转插值误差,PV值变化不大,但随着旋转角度偏差的增加,RMS值的偏差逐渐增大。当角度偏差达到1°,面形误差的RMS值低于0.7 nm。因此旋转角度偏差并非该两平晶绝对检验算法的主要误差源,在实验过程中将旋转架的机械精度控制在0.3°以内,残差波面的RMS值偏差低于0.2 nm,可以忽略旋转角度误差的影响。

图9 旋转角度偏差和面形精度误差的关系Fig.9 Relationship between rotation angle deviation and surface shape accuracy error
4.2 像素错位误差
如图10所示,当待测平晶具有一定楔角时,测量过程中的光线发生偏折,在测量平晶折射率非均匀性时,数据存在一定的像素错位。偏折距离d可近似表示为d≈L(n−1)β,其中L为待测平晶后表面到反射平晶的距离,n为待测平晶的折射率,β为待测平晶的楔角。实验中150 mm 口径的待测平晶的楔角为15′,根据干涉图像素量换算后,偏折距离应小于1个像素,像素分辨率约为0.323 mm/pixel,则控制L小于148 mm 即可。因此在对待测平晶进行折射率非均匀性测量时,只要控制待测平晶与反射平晶的距离,像素错位不会对测量结果造成影响。

图10 折射率非均匀性测量过程中光线偏折示意图Fig.10 Schematic diagram of deflection of light ray during measuring refractive index heterogeneity
4.3 平晶折射率非均匀性误差
在两平晶三面互检实验中,待测平晶折射率非均匀性波差与待测波面的旋转不变项的求解有关,将折射率非均匀性波差的旋转不变分量记作δr(x,y),待测波面的旋转不变项可以表示为

因此折射率非均匀性引入的算法误差为δr(x,y)/2n,以150 mm口径平晶为例,折射率非均匀性引入的波差的旋转不变项的PV值为8.59 nm,引入算法误差的PV值为2.86 nm,通过数值仿真分析平晶折射率非均匀性误差对算法的影响。
仿真波面为150 mm 平晶实验表面数据作为原始波面数据,PV值为32.45 nm,RMS值为3.41 nm,设平晶厚度为30 mm,光学平晶折射率非均匀性的标准评价参数 (∆n)max=1.08×10−6。将原始波面数据进行翻转、旋转和叠加运算后得到4次测量结果。不考虑折射率非均匀性误差时,直接对测量数据进行求解,得到的残差波面如图11(a)所示。表4给出了PV值和RMS值;考虑平晶折射率非均匀性误差时,将折射率非均匀性引入的波差扣除后,得到的计算波面和残差波面如图11(b)所示,表5给出了PV值和RMS值;图11(c)为两者残差波面的差值,即折射率非均匀性引入的算法误差,其PV值为2.67 nm,RMS值为0.52 nm,与理论误差 δr(x,y)/2n相符。
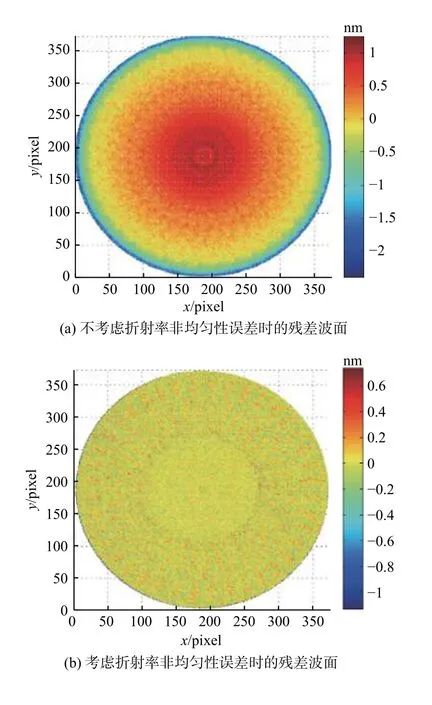
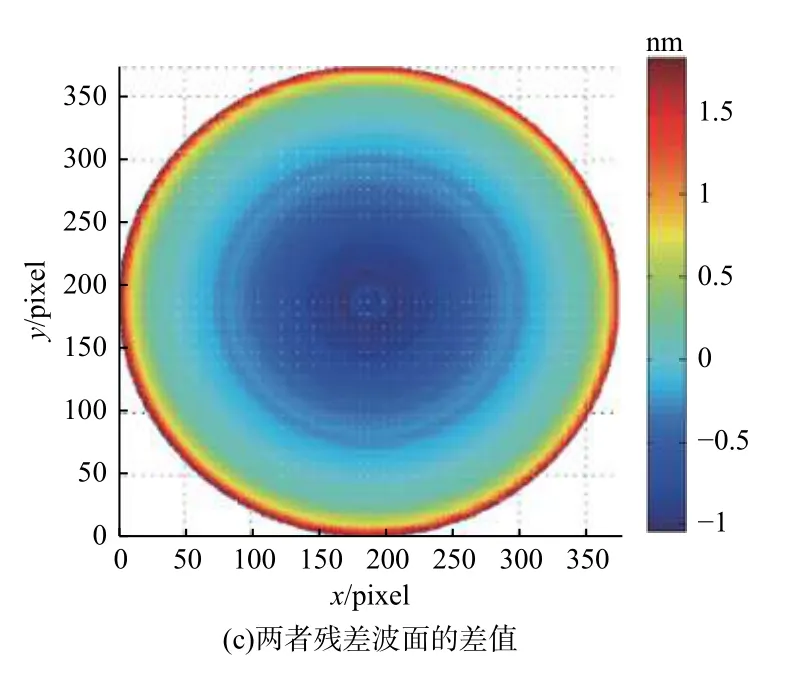
图11 两平晶三面互检仿真中有无折射率非均匀性误差时的残差波面Fig.11 Residual wavefront with or without refractive index heterogeneity error
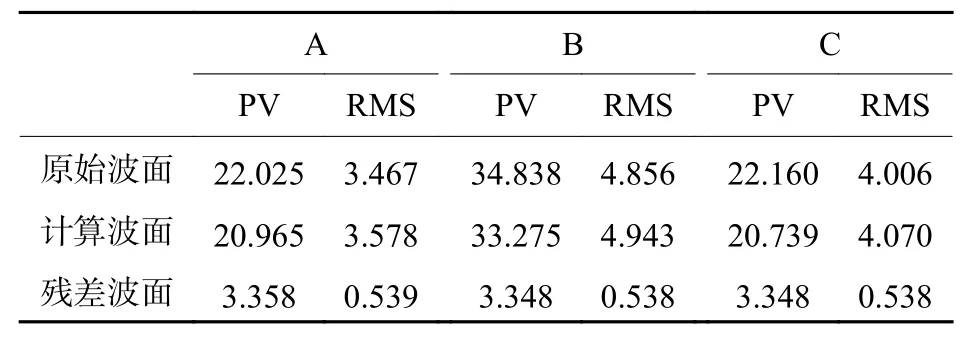
表4 不考虑折射率非均匀性误差时仿真过程中的各波面数据(单位:nm)Table4 Wavefront data without refractive index heterogeneity error

表5 考虑折射率非均匀性误差时仿真过程中的各波面数据(单位:nm)Table5 Wavefront data with refractive index heterogeneity error
当测试平晶的折射率非均匀性的标准评价参数(∆n)max<1×10−6时,引入的算法误差的PV值小于2.67 nm,当对折射率非均匀性引入的波差进行测量并扣除后,残差波面的PV值由3.36 nm 降低至1.86 nm,RMS值由0.54 nm 降低到0.13 nm,能有效提高算法求解的精度。
5 结论
基于N次图像旋转法的两平晶三面互检方法通过4次实验测量,在计算机内对波面进行N次虚拟旋转,求解得到被测光学平晶的绝对面形分布,满足中频波面的检测需求。本文结果表明试件旋转角度取63°,虚拟旋转次数N取40次,在保证求解效率的同时,算法精度达到最高。150 mm口径平晶的实验结果和传统三平晶互检法结果吻合,RMS值偏差小于0.5 nm。对实验误差源进行分析,结果表明当平晶旋转角度偏差控制在0.3°以内,RMS值偏差低于0.2 nm。当平晶折射率非均匀性标准评价参数 (∆n)max<1×10−6时,折射率非均匀性引入的算法误差的PV值小于2.7 nm。