红外成像系统最小可分辨温差影响因素分析
2021-04-11
(西安应用光学研究所,陕西 西安 710065)
引言
多波段共口径长焦距反射式红外成像系统作为光电跟踪、航空测控、广域监视等领域的关键任务载荷,广泛应用于态势感知、目标监视、地理定位等军事领域。最小可分辨温差(minimum resolvable temperature difference,MRTD)是红外成像系统的重要性能指标,直接决定系统的作用距离、目标细节分辨等关键特性。工程实践中,对某在研的多波段长焦距反射式光学凝视焦平面阵列成像系统的关键性能指标—最小可分辨温差的测试过程中发现,当空间频率到达0.75fN(fN为被测系统奈奎斯特频率)时,MRTD测试值会偏离理论预期。已有的2个MRTD 近似计算公式只列举出对计算结果有影响的诸多因素,但并未指出影响MRTD测试值的关键因素。本文通过对近似计算公式的分析,解算出影响MRTD测试结果的关键因素,并从工程实践中得到造成MRTD测试值偏离的关键因素是采样相位传递函数,实际测试结果更符合相位外采样。
1 最小可分辨温差的定义和计算公式
1.1 定义
最小可分辨温差是红外专业领域用于评价红外成像系统(以下简称系统)图像质量的主观测量参数之一,其他参数还包括目前很少使用的用于评价系统探测性能的最小可探测温差MDTD、奈奎斯特频率、采样相位和测试者主观因素,当前还未广泛采用的三角指向鉴别TOD参数等[1-2]。MRTD反映了系统分辨目标细节的能力,是对包括人眼特性在内的系统空间分辨力和热灵敏度的噪声限阈值测量,定义为均匀背景与含4个条纹的条纹图之间的温差,每个条纹的宽高比为1∶7。MRTD最初是针对扫描型前视红外热像仪而定义的(在测量过程中含4个条纹图案中的条纹方向垂直于前视红外的扫描方向),在测量期间,观察者可调节热像仪的增益和偏置以及相对系统显示的位置,以便得到刚好能分辨目标的最小温差[3]。
1.2 计算公式
MRTD经典近似计算如下式所示[4]:

式中:MTFperceived=MTFsys×MTFmonitor×MTFeye为可觉察传递函数;MTFsys为系统传递函数,等于光学系统、探测器、信号和图像处理电路等传递函数的乘积;MTFmonitor为监视器传递函数;MTFeye为人眼传递函数;k1为理论值与测量值的匹配经验常数;f为目标空间频率;βi为观测者人眼积分因子;σi为均方根噪声值;为系统三维时间和空间噪声;σTVH=NETD,为系统的噪声等效温差。
由(1)式不难得出,MRTD 受到观察者主观因素(包括不同观察者观察频率响应、受训练与否、人眼特性和视觉角、疲劳程度、观察时间限制等)、系统传递函数(包括光学传递函数、探测器传递函数、数据处理电路硬件和图像处理软件传递函数等)、系统噪声(因为所有的噪声分量都可表示为等效温差,所以测量值与环境温度有关)等因素的影响。如果用一句话描述MRTD的特点,可简单总结为:MRTD 是受主观因素、系统设计、环境影响的反映系统对目标细节辨识能力的可测参量。据此特点,系统设计者和测试者需要做的就是采取相应措施克服干扰因素影响,最大程度地客观反应和发挥系统特性。
需要说明的是,(1)式仅用于MRTD的理论近似描述,但是,(1)式的计算结果会受到观测人员数量及观测者主观因素的影响。因此,在实际系统设计计算中需要对(1)式进行工程化。本文采用了弱化主观因素的MRTD 工程计算公式,如(2)式所示[5-6]:

2 最小可分辨温差的影响因素
从上述分析中可知,MRTD的测试结果受到观察者主观因素、系统噪声、成像系统传递函数等多种因素的共同影响,下面将对主要影响因素进行详细分析。
2.1 主观影响
主观影响因素包含了观察者经验、情绪、疲劳程度等诸多方面,我们重点从MRTD测量过程中观察者观察频率响应、人眼特性和视觉角、消除测试结果易变性等方面进行说明。
1)观察频率响应
理想情况下,每一名观察者观察到用于MRTD测试的4杆靶目标的响应概率与MRTD的关系曲线是一个阶跃响应(此处MRTD可以理解为一个阈值,超过此阈值可分辨4杆靶,否则不能),但实际的观察频率响应属于对数正态分布,如图1所示,在线性坐标中实际响应表现为斜坡曲线[7]。根据图1中一位观察者多次观察得到的响应斜坡曲线可看出,斜率越大,测量变化越小,该观察者观察一致性越好,那么该观察者更适合作为MRTD的测试者。反之,说明测量变化较大,该观察者观察一致性较差,不适合作为MRTD的测试者。

图1 观察者的理想和实际观察频率响应Fig.1 Ideal and actual response frequency
依据观察结果的对数正态分布特性,N名观察者对同一系统MRTD测试结果的几何平均,即为系统的平均MRTD,如下式所示:

式中:MRTDAVE为系统平均 MRTD;MRTDi为每名观察者测得的系统 MRTD。
2)人眼特性和视觉角
观察者观测到的目标尺寸与观察者到显示器的距离之比被定义为视觉角[6]。在无噪声的情况下,如图2所示,人眼对比度阈值表征为J形,人眼对3 cycles·deg−1~8 cycles·deg−1的空间频率目标更敏感。因此在实验室测试时,观察者会下意识地移动其与显示器的距离,调整到最佳观察距离,获得与观察目标匹配的最低的人眼对比度阈值,以适合不同空间频率目标的鉴别,而且不同观察者所选择的最佳距离也会有差异。

图2 人眼对比度阈值与目标空间频率的关系曲线(背景亮度分别为10 cd·m−2 和 100 cd·m−2)Fig.2 Relation curve between observer contrast threshold and target spatial frequency (background brightness is 1 0 cd·m−2 and 1 00 cd·m−2)
理论上,系统MRTD 与目标空间频率关系曲线也类似J形,但实际形状受到图像中存在的噪声影响,如图3所示。对于一定的温差阈值,随着图像噪声增大(信噪比减小),可分辨的目标空间频率降低。另外,由于水平和垂直采样的差异产生不同方向噪声的差异,造成系统水平和垂直方向的MRTD 不同,尤其对于扫描型红外成像系统更显著。

图3 不同空间频率噪声对系统MRTD的影响Fig.3 Effects of different spatial frequency noise on MRTD
3)消除测试结果易变性
MRTD测试中由于受到观察者主观因素、图像噪声、环境温度、成像采样相位、测试持续时间等诸多因素的影响,容易造成测试结果变化性较大,部分影响效果如图4所示。

图4 不同因素对MRTD测试结果的影响Fig.4 Effects of different factors on MRTD
试验表明,不同试验室的测试结果会达到50%的差异,同一试验室内2次测量结果差异也可达到20%。因此,在MRTD测试中采用多次测量结果统计,经过训练有素的多名观察者,寻找温差阈值的上下步进法,获得正/负对比度温差绝对值平均,增加温度校正系数,严格测量程序和测试环境等方法以消除测试结果的易变性,提升测试结果的一致性[3-4]。
2.2 传递函数的影响
1)传递函数的定义和特点
由光学成像理论可知,当点目标通过光学成像系统时,由于衍射和像差的综合影响,它在像面上生成一个弥散斑,该过程从数学意义上可以描述为δ函数的脉冲响应,也称为点扩散函数(point spread function,PSF),PSF 越窄,图像质量越好。上述过程在空间域-像面坐标系中,可描述为图像亮度分布g(x,y) 等 于脉冲响应h(x,y)与理想图像f(x,y)的卷积[4],如(4)式所示:

为简化运算,用乘法代替卷积,直观反映成像系统级联关系,将(4)式两端进行傅里叶变换,如(5)式所示。由此,图像亮度分布从空间域转换为空间-频率域。

式中:H(ξ,n)归一化为零空间频率的单位值后成为系统光学传递函数OTF[7]。该函数通常为复函数,用系统调制传递函数MTF 描述其模量,用系统相位传递函数PTF 描述其辐角 θ (ξ,n)[8]。

光学系统MTF、探测器MTF 和电子电路MTF的乘积构成了系统MTF。系统MTF 是系统对不同空间频率正弦波目标的响应,反映系统真实复现物空间景物的能力,某空间频率对应的MTF 值为系统输出调制度与输入调制度之比。
红外成像系统主要包括扫描型和凝视型,采样(数字化)是所有成像系统的一个内在特征。凝视系统中由于探测器敏感元位置的对称性,在水平和垂直方向上具有相同的采样速率。扫描系统中扫描方向上的探测器的输出可以任何速率电子数字化(采样),扫描垂直方向上的探测器敏感元位置确定了采样速率,因此,采样速率在水平方向和垂直方向上可以不同。我们通常把凝视成像系统也称为欠采样系统[1]。
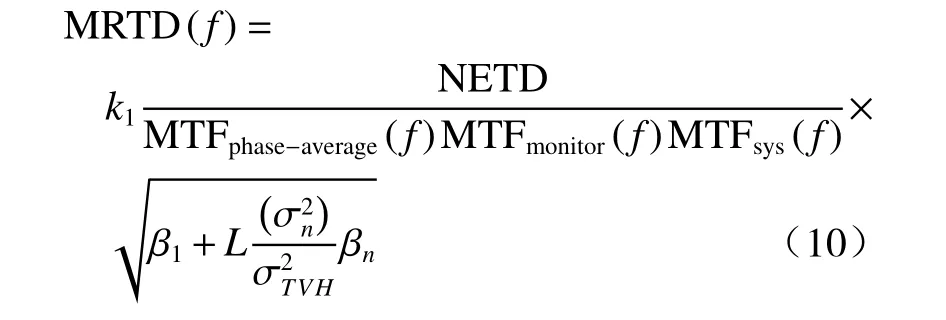
因为采样系统的输出调制度是空间频率和采样相位的函数,所以采样系统并没有一个唯一的MTF,与过采样系统相比,采样相位对欠采样系统带来的影响更显著。采样相位引起的MTF 变量可近似表达为

式中:θx为采样相位角;f为空间频率;fN为系统奈奎斯特频率。θx=0为相位内采样,当f=fN时理论上MTFphase=1,对系统MTF不产生影响;为相位外采样,理论上 MTFphase=0,对系统 MTF产生最坏影响。对于通常关注的频率范围 0~fN,MTFphase以相位影响平均值MTFphase−average并包含在系统MTF中,其平均值可用公式(9)表达,与相对空间频率
f/fs的关系曲线如图5所示。

图5 相位平均传递函数与空间频率关系曲线(相位中值传递函数为中值近似)Fig.5 Relation curve between MTFphase−average and spatial frequency (M TFphase−median being an approximation of median)

式中:fs为系统采样频率,fs=2fNMTFphase−average;MTFphase−median为相位平均传递函数;为相位中值传递函数。
故(1)式可修正为
2)采样相位传递函数的影响
采样相位对静态MRTD测试结果将会产生影响[9-10]。由上述分析可知,由于采样相位对系统MTF 产生影响,从而也对MRTD的测试结果带来影响。在MRTD的测试中,与多个不同空间频率的正弦红外靶相比条形靶更易制作,并且条形靶经过傅里叶变换可以包含无限个空间频率正弦成分,所以在系统MRTD测试中,通常采用固定好的宽高比为1∶7的黑白等间隔4杆条形靶作为测量目标。对于小于系统奈奎斯特频率的输入信号系统能够复现,对于高于奈奎斯特频率的输入信号,系统输出将其混淆为低频,条形靶宽度和信号强度发生改变。
当一个空间频率为f的信号被采样(采样频率fs),由于边带效应,产生频率为nfs±f的拍频输出[4],输出信号幅值和脉宽受拍频频率影响。一个拍频周期持续N个输入信号周期,对于一阶拍频(n=1),N的表达式如(11)式所示。随着f趋近fN,拍频现象愈发明显,N与相对空间频率(f/fN)的关系曲线如图6所示。


图6 N 与相对空间频率( f/fN)关系曲线Fig.6 Relation curve between N andf/fN
如图7所示,对于无限多个周期条形靶目标,可以明显看到探测器输出拍频现象,在实际测试中由于靶标为4杆靶,所以拍频现象不易察觉。这种情况下,可以通过将4杆靶相对探测器采样成像位置移动 ±PAS/2(PAS为探测元中心距对应张角,为探测元中心距,lf为光学焦距),使探测器输出从最大值(相位内采样)变为最小值(相位外采样),观察拍频现象。从图7可看出,当f/fN<0.6,拍频现象不明显,改变采样相位,系统输出仅产生轻微变化;当f/fN>0.9,拍频现象明显,改变采样相位,系统输出变化明显,并且总能找到一个合适相位,使得系统输出最大(相位内采样);当 0.6≤f/fN≤0.9,无论怎样改变采样相位,系统输出总无法达到最大值(相位内采样),4杆靶所成图像中总有1 或2杆靶比其他靶杆宽或信号强度弱。

图7 不同条件下理想凝视系统(100%填充因子)采样产生的拍频输出Fig.7 Beat frequency produced by ideal staring system under different conditions (100% filling factor)
当输入信号频率大于fN,系统输出将其混淆为低频(如将4杆靶混淆为3杆靶),条形靶宽度和信号强度发生改变。如图8所示,对于无限多个周期条形靶目标可以明显看到所产生的混淆现象,实验表明,当f≤1.14fN(此时 |N|≥4)可以找到一个合适相位,使系统输出看起来复现了黑白相间的4杆靶目标(实际上系统输出已经将输入信号混淆为低频)。

图8 理想凝视系统(100%填充因子)采样产生的拍频输出( f/fN=1.06,|N|=8.83)Fig.8 Beat frequency produced by ideal staring system(100% filling factor,when f/fN=1.06,|N|=8.83)
在实际系统MRTD测试中,由于测试目标为周期有限的4杆靶,受局部调制度的变化以及探测器填充因子、电子单元MTF 等的影响,系统MTF与理论平均MTF 有差异,也造成对系统MRTD测试结果有影响,图9为某系统理论预计的MRTD和实测结果的比较。

图9 某凝视红外热像仪MRTD测试与理论预计结果Fig.9 MRTD test and theoretical prediction of staring thermal imager
从图9可以看出,当f/fN<0.6时,MRTD测试值与理论预计值接近,采样相位影响不明显;当0.6≤f/fN≤0.9时,MRTD测试值有所偏离(无论相位内还是相位外采样),采样相位影响显著;当f/fN>0.9,采样相位影响明显,相位内采样输出与理论值接近,相位外采样导致MRTD测试值仍有大幅偏离;当f=fN,相位外采样所成像MRTD 达到一个较大值,而相位内采样成像实测值与理论预计接近;当f/fN>1,相位外采样已无法测得MRTD,而相位内采样成像可以得到一个较理想的MRTD 值。需要说明的是,上述现象会出现在任何凝视成像系统中,这是由于观察者的主观易变性,多个适宜的空间频率靶缺失,测试环境不一致等原因造成,一般的测试者经常不注意上述现象。
因此,在系统MRTD测试中,切忌以少量的几个频率靶标下的MRTD测试值连线代表系统的MRTD 性能。MRTD测试中应主动调整靶标相对于探测元的采样相位,以获得更客观的系统MRTD测试结果。
采样相位传递函数对动态MRTD测试结果也有影响[10]。上面讨论了目标相对被测系统静止,仅在需要改变相对位置时才进行位置移动,位置移动后重新固定目标进行测试,我们称之为静态MRTD测试,这也是大多数情况下系统MRTD的测试方法。当目标相对被测系统的采样探测器连续运动时,目标相对探测元的运动会造成成像采样相位不断变化,结合人眼积分特性,会对MRTD测试结果产生影响,称为动态MRTD测试。试验表明[4,6],当目标相对运动速度 ≥10 DAS·s−1且远小于帧速(等于帧频)时,系统会测得1.5fN处的MRTD,换句话说,系统会分辨1.5fN的4杆靶,如图10所示。从图10中还可以看出,静态MRTD 隆起部分消失(与扫描型成像系统MRTD测试结果类似),这得益于运动目标造成的过采样,这也是在外场试验中运动小目标或目标细节更易被识别的原因。从理论(F为光学系统F数;λ为中心工作波长)可进一步分析[11-15],与的光学受限型系统相比,的探测器受限型系统因为目标运动带来的MRTD的改善更显著,也就是说,探测器受限型系统在外场试验中更易分辨运动小目标或目标细节。由此可以推出,基于采样理论的扫描型成像系统或微扫描凝视成像系统在时,对高于奈奎斯特频率信号的复现性能更佳。

图10 静态MRTD 和动态MRTD测试结果对比Fig.10 Comparison of test results between static and dynamic MRTD
3 实验结果
为了进一步证明本文所提出的结论,搭建实验环境进行实验:在室温为25 ℃,相对湿度为50%的实验室环境中,采用焦距为3 m,口径为300 mm的红外综合性能测试仪,对焦距为1 m,口径为250 mm的某多波段反射式长焦红外光学系统进行MRTD测试。测试结果和理论预计结果如表1和图11所示(采用(2)式完成MRTD理论预计)。

表1 系统MRTD理论预计和测试结果Table1 Theoretical prediction and test results of MRTD

图11 某多波段反射式长焦红外凝视系统MRTD测试和理论预计结果Fig.11 MRTD test and theoretical prediction of multi-band reflective infrared staring system
实验结果表明,当空间频率在0~ 0.6fN之间,MRTD测试值与理论公式计算值较为接近,且符合相位内采样。空间频率在 0.6fN~ 0.9fN之间,MRTD测试值显著偏离了公式计算值,近似为相位外采样。当空间频率靠近 0.9fN时,MRTD 已经超出了红外综合性能测试仪的标称值范围,未能得到MRTD的测试值。
4 结论
本文通过对观察频率响应、视觉角、采样相位传递函数等诸多影响MRTD测试结果的因素进行分析,并依据工程试验,得出空间频率在 0.6fN~0.9fN区间内,采样相位传递函数是影响红外成像系统MRTD的关键因素这一重要结论。同时,为提高MRTD 实验室测试的准确性,需要光电产品设计者了解各型测试设备的特性,熟悉测试条件,提高测试仪器和被测产品的匹配性。测试人员应训练有素,在测试过程中寻找最佳采样相位,寻找最优温差阈值,并进行多次测量结果统计,以增加测试结果的客观性和一致性。