并联射弹水下运动实验研究
2021-04-10魏英杰樊继壮
张 鹤,魏英杰,王 聪,樊继壮
(1. 哈尔滨工业大学 航天学院,黑龙江 哈尔滨 150001;2. 哈尔滨工业大学 机电学院,黑龙江 哈尔滨 150001)
0 引 言
超空泡减阻技术是近年来备受关注的一种水下武器减阻技术,采用该技术设计的高速超空泡射弹主要应用于反鱼雷和反水雷作战系统。并联射弹水下运动是指2 个以上的弹体模型以极短的时间间隔,并列平行穿越自由液面并在水下高速运动的过程。该过程不仅会出现穿越气水界面、空化、湍动、尾拍等复杂的流动现象,而且还存在多弹体相互扰动及流场与运动的耦合作用,具有重要的理论意义和应用研究价值[1-2]。
针对超空泡射弹问题,国内外学者做了大量的研究。Logvinovich G. V.,Vlasenko Y. D.,Savchenko Y.N.[3-5]等通过大量的超空泡射弹实验总结出在一定限定条件下计算超空泡形态的经验公式,其速度跨度从低速至超音速。Mostafa N 等[6]分别针对垂直、水平射弹入水这2 种发射方式进行了航行体自由飞行实验,并采用piv 技术以及集成Cu-Vapor 激光的高速CCD摄像机对射弹水下运动情况进行拍摄。Cameron J. K.等[7]开展了超空泡垂直射弹入水的实验研究,对超空泡的形态演化、弹道变化以及弹着点位置进行了详细观察和分析。Truscott T T 等[8]从以表面张力为主的低速入水到高速射弹,系统调查和总结了相关的试验方法,理论模型以及数值模拟研究,为后续的研究工作做出了重要的铺垫。施红辉等[9-11]利用高速摄像机,在大量实验的基础上分析了射钉入水瞬间自由液面的波动性质和入水之后的弹道不稳定性。易文俊、熊天红等[12-14]针对不同结构参数的带圆盘空化器模型,进行了其超空泡形态以及阻力特性的数值模拟以及实验研究。曹伟等[15]基于轻气炮进行了水平高速射弹实验,探究不同结构参数的空化器模型下空化数与超空泡形态参数的关系。赵成功等[16]基于轻气炮研究了初始空化数对射弹模型弹道特性的影响,并在实验结果的基础上将独立膨胀原理中的系数进行修正。
目前的研究工作大多集中在单独射弹入水,对于多弹体并联射弹水下运动过程的研究很少,本文基于高速摄像机和以轻气炮为动力源的并联发射装置,对并联射弹水下运动过程中的空泡演化特性以及弹道稳定性进行研究。
1 实验系统及方案
实验系统如图1 所示,包括动力加载系统、发射控制系统、光测系统以及水池防护系统。动力加载系统主要由轻气炮、适配器、并联发射筒以及高压管路组成,并联发射炮筒安装于角度可变(微调)、间距可调的适配构件上,气室固定在支撑基础上,通过高压软管与并联炮筒连接;发射控制系统由控制器和高压电磁阀组成,可以实现实验的智能控制,使气室与摄像机按时序触发;光测系统主要包括炮口通断靶测速系统及2000 fps 的高速摄像机等装置。此外,水池尺寸为1.2 m×1.2 m×10 m,水池底部和后方铺设防护层,以防止射弹对水池造成破坏;水池旁设置水槽回收因射弹喷涌出的水。
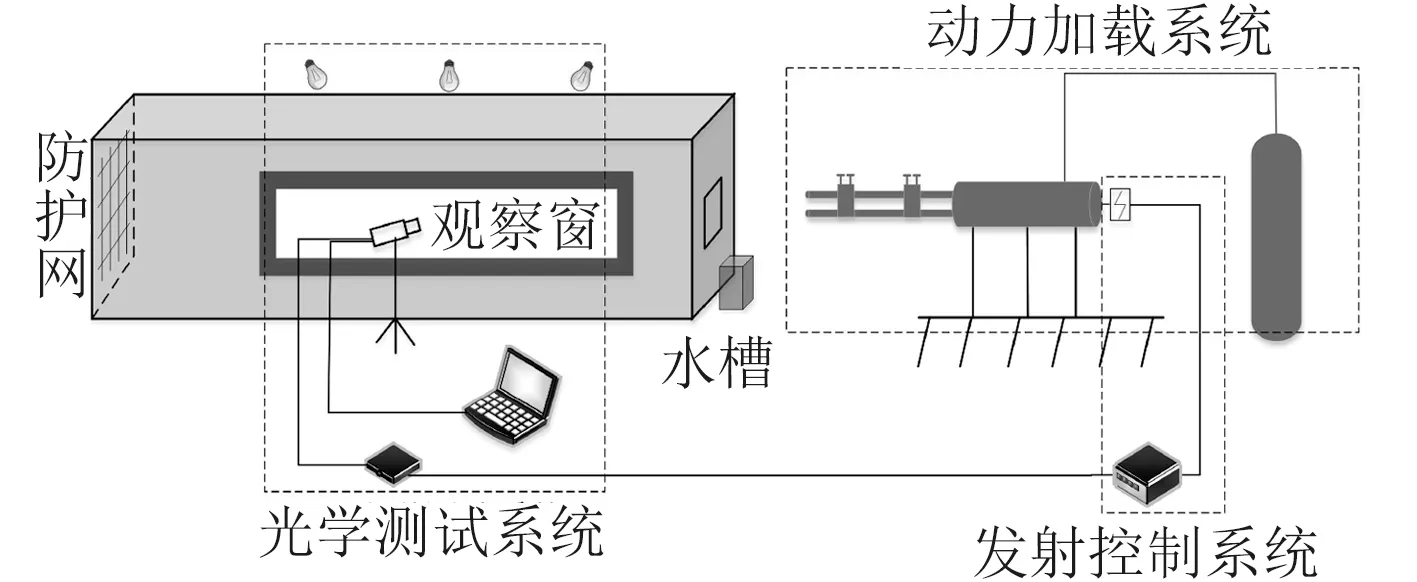
图1 实验系统示意图Fig. 1 Experiment system
实验中采用的铝合金射弹模型如图2 所示,总长L=240 mm,锥段长L0=60 mm,空化器直径D0=8 mm,圆柱D1=20 mm。
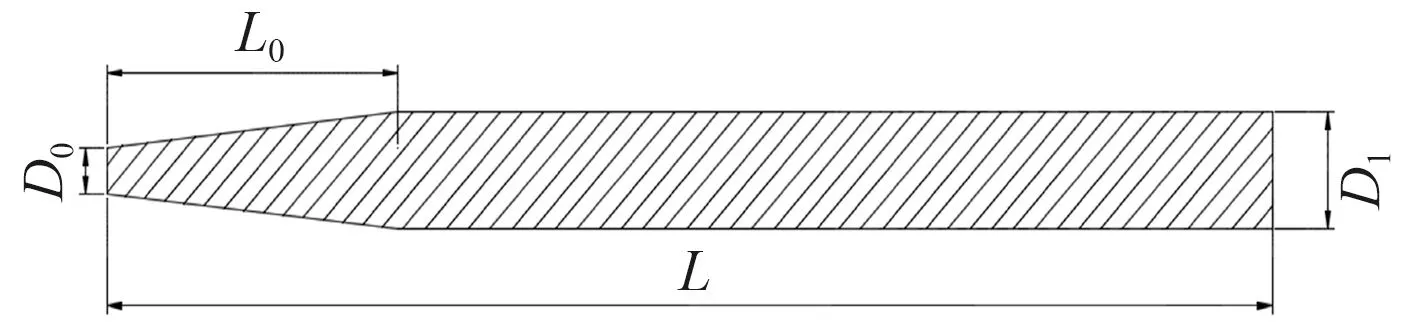
图2 射弹模型尺寸Fig. 2 Projectile model size
表1 列出了本文中的实验工况。本文以先发射弹(下方射弹)入水时刻为时间零点,发射时差∆t是指两发射弹发射的初始时间间隔,空化数σ=(p∞−pv)/(0.5ρu2), 其中p∞为 流场的参考压力,pv为水的饱和蒸汽压,ρ 为水的密度,u为弹体速度。
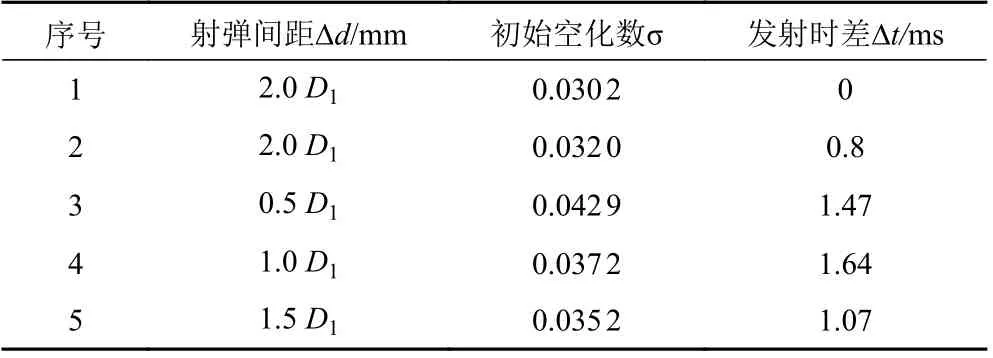
表1 实验工况表Tab. 1 Projectile model size
2 实验结果及分析
2.1 并联射弹水下运动空泡演化机理
并联射弹不同于单独射弹,主要是因为并联弹体之间会存在相互的干扰,使彼此流场和弹道发生不同程度的变化。为方便表示,称双射弹发射时差为0 的工况为同步并联射弹,不为0 的工况为异步并联射弹。图3 为工况1 的同步并联射弹实验。在并联射弹入水之后,双空泡尺寸迅速扩张并逐渐形成稳定的空泡,空泡闭合点的高压区使空泡内水蒸汽在尾部部分凝结,产生较为明显的汽水混合物,透明度较低。在水阻力的作用下,空化数逐渐升高,空泡尾部的汽水混合物周期性交替脱落形成含汽涡旋。受并联双空泡之间的流场耦合作用,空泡外侧轮廓的曲率要大于内侧轮廓,且后半段空泡和尾迹以射弹中轴线为基准相互靠拢。受重力影响,上方射弹受到的水域压力比下方射弹低。由于空泡界面对压力的变化较为敏感,且压力对于空泡的扩张起到负反馈的作用,所以上方射弹空泡的扩张程度要略比下方射弹空泡高。
图3 工况1 同步并联射弹实验Fig. 3 Synchronous parallel projectile experiment of working condition 1
图4为工况2 的异步并联射弹实验。不同于同步并联射弹,当形成稳定的双空泡后,下方射弹空泡尺寸远小于上方射弹,且上方射弹空泡在下方射弹空泡尾部闭合点附近存在最大的空泡截面半径。产生这种现象的原因为射弹的头部空化器和尾部空泡闭合点附近的流域均存在局部高压区,下方射弹空泡受上方射弹顶头高压的影响,扩张受到抑制,导致空泡尺寸急剧缩减。而上方射弹靠近下方射弹空泡尾部闭合点之前的区域,由于受到下方射弹空泡低压区的正激励影响,空泡轮廓一直在向外扩张。但是由于下方射弹空泡闭合点处存在局部高压区,使处在该区域的上方射弹空泡受到压差负激励作用,从而空泡的演化状态由扩张逐渐过渡为收缩,由此出现了最大的截面直径。
图4 工况2 异步并联射弹实验Fig. 4 Asynchronous parallel projectile experiment of working condition 2
2.2 间距对并联射弹水下运动过程的影响
2.2.1 间距对空泡演化的影响
图5 为工况2~工况5 不同间距下异步并联射弹的实验。在t=2.3 ms 之前,并联射弹弹道较平稳,运动保持水平,如图5(a)所示。当间距∆d=0.5D1时,由于上方射弹对下方射弹空泡的排挤作用,导致下方射弹空泡不对称性较明显,内侧轮廓呈鼓起状态。随着间距的增加,下方射弹空泡对称性增强,内侧轮廓半径逐渐接近于外侧轮廓,当间距∆d=2.0D1时,下方射弹空泡内侧轮廓基本恢复平滑,鼓起状态消失。随着射弹入水深度的增加,空泡完成闭合并不断拉长。当t=10.4 ms 时,不同工况下并联双空泡的特征长度和截面直径均达到峰值,如图5(b)所示。当间距较小时,下方射弹尾迹产生了分流现象,且较粗尾迹的斜率随着间距的增大而逐渐放缓。
图5 工况2~5 不同间距下异步并联射弹实验Fig. 5 Asynchronous parallel projectile experiment under different spacing
图6为t=10.4 ms 时不同间距下双空泡的演化示意图(由于∆d=0.5D1时下方射弹受到耦合流场的强烈扰动而弹道失稳,所以这里不做分析),其中DC/D1为空泡的特征直径,LC/D1为空泡特征长度。对于6(a)图下方射弹空泡来说,当间距∆d<1.5D1时,空泡尺寸差别并不明显,间距增大使特征长度略有增加。但当间距∆d>1.5D1以后,该工况下空泡特征长度显著增大。这说明,双空泡之间的耦合影响在此间距区间显著降低,也就是上方射弹空泡对下方射弹空泡流场的干扰大幅度减弱。对于6(b)图上方射弹空泡来说,该时刻随着射弹间距的增加,内侧空泡半径减小,且上方射弹空泡的最大截面直径均出现在下方射弹空泡的尾部闭合点附近。
图6 t=10.4 ms 时刻间距对空泡演化的影响Fig. 6 The effect of spacing on the evolution of vacuoles
2.2.2 间距对弹道稳定性的影响
并联双空泡的演化状态不仅反映了该时刻的流场特性,而且直接影响着并联射弹的弹道稳定性。对于异步并联射弹来说,先发射弹(上方射弹)空泡远比后发射弹(下方射弹)空泡敏感,受流场扰动的影响更加强烈,这也在上述分析中得到证实,而先发射弹空泡的状态直接预示了先发射弹的弹道稳定程度。
图7 为入水13 ms 内并联射弹头部竖直方向的无量纲偏移量随间距的变化曲线。从图中可以发现随着射弹径向间距的增大,下方射弹的偏移量逐渐降低,上方射弹的偏移量在纵坐标0 点附近波动,且上方射弹的偏移量明显小于下方射弹。间距∆d≤0.5D1时,2 发射弹的偏移量均竖直向下,随着间距增加下方射弹受上方射弹的耦合影响逐渐减弱,而上方射弹则主要受重力影响。当间距增大到2.0D1时,双弹的偏移量变为向上。之后并联射弹的偏移量随间距的增大逐渐趋近于0。
图7 并联射弹头部在竖直方向偏移量随间距的变化Fig. 7 The law of offset variation with spacing
图8中圈出部分即为尾拍撞击区域。间距∆d=0.5D1时,并联射弹受到的耦合影响最为剧烈,先发射弹失去稳定,弹体直接向下运动直至碰到水池底面。当间距增大后,先发射弹虽仍然向下方偏移,但是通过尾拍运动总能调整姿态使轨迹回到正常。∆d=2.0D1时,弹体已经不再发生尾拍运动。
结合图6~图8 可以发现,下方射弹受制于下方射弹空泡的状态而比上方射弹更容易失去稳定。当间距∆d在1.5~2.0D1区间时,双空泡之间的耦合影响迅速减弱,具体表现在下方射弹空泡的特征尺寸以及下方射弹的竖直方向偏移量的变化。当间距进一步增大后,异步并联射弹的空泡形态逐渐对称,偏移量也趋近于0。因此可以判断,上述工况弹道稳定的临界工况为∆d=2.0D1。
图8 不同间距下的尾拍撞击区域Fig. 8 Tail shot impact area at different pitches
2.3 异步并联射弹尾迹脱落模式分析
由图5 和图8 可以发现,尾迹分叉现象的产生均会伴随着尾拍运动。但就单独射弹水下运动而言,就算弹体发生了尾拍运动,尾迹也不会如并联射弹的先发射弹空泡般产生分叉现象。并联射弹的先发射弹空泡两股尾迹独立发展的主要原因,一是由于受到后发射弹空泡尾段低压区的强吸引,使尾迹具有了向上倾斜偏移的趋势。二是由于两股尾迹产生的根源不同,一股是尾拍被动产生,一股是主动的自然脱落,如图9所示。一般来说自然脱落的汽水混合物会自空泡闭合点处排出,形成螺旋状的尾迹涡旋。受后发射弹空泡尾段低压区的影响,先发射弹空泡闭合点向上偏移。此时,先发射弹尾拍产生的脱落气泡自尾拍撞击点开始,受水域压力与射弹运动方向的影响沿着空泡壁面向后滑落。当脱落气泡运动到空泡尾部闭合点附近时,其受到高压区影响远离空泡闭合点,并顺着空泡壁面曲线向下排出,与先发射弹自然脱落的尾迹形成空间错位,即产生了尾迹的分流现象。
图9 尾迹分叉现象的形成机理Fig. 9 Formation mechanism of wake bifurcation
由图9 可知,当t=7.0 ms 时下方射弹空泡闭合点与自然脱落的尾迹受低压区吸引上移,而因尾拍脱落的尾迹却受空泡闭合点高压区的影响独立发展,轨迹方向与下方射弹运动方向一致。随着入水深度的增加,先发射弹与后发射弹的间距逐渐增大,双空泡之间的耦合影响迅速减弱,且在t=12.8 ms 时尾迹分叉现象消失,空泡闭合点逐渐下移。此时下方射弹发生尾拍运动,并在t=15.1 ms 时尾迹再次分叉。
随着射弹间距的增大,并联双空泡尾迹的脱落状态经历了3 种模式,分别是分叉模式、靠拢模式以及孤立模式,如图10 所示。当射弹间距∆d≤1.5D1时,尾迹脱落为分叉模式,先发射弹空泡尾迹分成两股,一股受到并联射弹流场耦合的强吸引而大幅度向后发射弹空泡靠拢,另一股几乎不受影响而独立发展。当射弹间距增大后,尾迹脱落过渡到靠拢模式,即这时候先发射弹空泡尾迹已经不再分叉,而是受到双空泡之间低压区的影响而向其靠拢。当射弹间距∆d≥2.0D1时,尾迹脱落变为孤立模式,即不管是下方射弹空泡还是上方射弹空泡的尾迹均不再受到双空泡之间流场的影响,尾迹独立发展。这种尾迹脱落模式的改变从侧面反映了并联射弹之间流场耦合影响的强弱变化,是判断流场扰动的重要特征。
图10 尾迹脱落模式Fig. 10 Wake off mode
3 结 论
本文基于高速摄像机和以轻气炮为动力源的并联发射装置,对并联射弹水下运动过程中的空泡演化特性以及弹道稳定性进行研究,得到以下结论:
1)并联射弹双空泡受彼此流域压力梯度的影响而表现出不同的演化特性,依照发射时差的不同,并联双空泡受到压差影响的局部区域也不同,最终呈现的空泡形态也就各不相同。对于异步并联射弹来说,先发射弹(下方射弹)更容易受到流场扰动而使稳定程度下降。
2)随着射弹间距的增大,双空泡之间的耦合影响逐渐减弱,具体表现在下方射弹的空泡形态变化、尾拍现象以及头部在竖直方向的偏移量。在本实验条件下,并联射弹弹道稳定的临界间距为∆d=2.0D1。
3)尾迹分叉现象在射弹间距较小时产生,源于下方射弹的尾拍运动以及其空泡闭合点的上移。随着射弹间距的增大,异步并联射弹尾迹脱落经历3 种模式,分别是分叉模式、靠拢模式以及孤立模式。