多目标干扰环境中威胁目标自动跟踪方法
2021-04-10李羿萱杜选民周胜增
李羿萱,杜选民,周胜增,高 运
(上海船舶电子设备研究所,上海 201108)
0 引 言
随着被动声呐检测性能的不断提高,声呐的作用距离得到有效提高,在声呐作用距离内可检测到的目标数大大增加,多目标轨迹分布情况越来越复杂,同时背景杂波数目也随之增多,如何在多目标复杂的情况下对感兴趣的威胁目标进行有效跟踪具有迫切需求。
传统的被动声呐跟踪方法,适用于目标较少且方位间隔较大的情况,对于目标较多且轨迹变化比较复杂的情况,例如目标交叉、邻近、新目标出现、已有目标突然消失等情形,往往会出现失跟、漏跟以及错跟等情况。例如多假设跟踪[1]和联合概率数据关联算法[2]等基于数据关联技术的多目标跟踪方法,在目标数较少、多目标情况不复杂的条件下,可以获得一定的有效跟踪效果,但是在目标数目增加或者目标情况复杂的情况下,容易在计算复杂度增大的同时导致跟踪效果较差。这是由于这些算法的中心思想是将多目标跟踪问题解析成多个单目标问题,再对各个单目标分别进行滤波处理,最后通过数据关联的方法融合每个单目标处理后的结果。
针对传统多目标跟踪算法面对强干扰或多目标轨迹情况复杂时跟踪效果较差的问题,Mahler 教授提出了基于随机有限集理论(RFS)的概率假设密度滤波[3](PHD)的多目标跟踪算法,实现了集函数的积分运算到单个变量积分运算的转化,避免了数据关联问题,解决了计算复杂度“爆炸”的问题,适用于较复杂背景下的多目标跟踪。Vo 教授的研究小组为了解决PHD 滤波器不存在一般意义上解析解的问题,分别提出了能提供闭合解的高斯混合PHD(GM-PHD)滤波器和粒子PHD(P-PHD)滤波器[4]。其中,GM-PHD 滤波器既可以提供PHD 的解析解,又避免了粒子采样和聚类等复杂操作,具有运算效率高、计算量较小的优点,已在雷达的多目标领域得到应用[5]。
本文针对多目标干扰情况下被动声呐的多目标中威胁目标方位的自动跟踪进行研究,提出一种基于GM-PHD 滤波器的威胁目标方位的自动跟踪算法。首先利用GM-PHD 滤波器对多目标时间方位历程图进行处理,得到观测区域内所有存在目标的方位信息,对这些存在目标的方位进行功率谱估计,再利用GMPHD 滤波器对观测区域内所有目标的线谱进行跟踪,通过提取不同频段线谱能量区分干扰目标和威胁目标,有效地找出多目标中威胁目标的轨迹及方位信息。最后,利用试验数据对所提算法的有效性进行了验证。
1 算法原理
为了精确地找到感兴趣的威胁目标的方位,首先对多目标的时间方位历程图(BTR)进行多目标方位跟踪处理,本文使用GM-PHD 滤波的算法进行多目标的跟踪处理,得到观测区域内所有存在目标的方位,并对每一个存在目标的方位进行功率谱估计和频率归一化,得到每个目标的线谱信息,再使用GM-PHD 滤波算法对目标线谱进行跟踪,通过分析不同频段线谱的能量特征,找出感兴趣的威胁目标并给出威胁目标的方位信息。

图1 多目标中威胁目标方位的自动跟踪流程图Fig. 1 Flow chart of automatic tracking of threat target position in multiple targets
2 基于GM-PHD 滤波器的多目标跟踪
2.1 PHD 滤波基本算法
假设在k时刻,目标的数目是M(k),且在k−1时刻的目标状态随机集是Xk−1={xk−1,1,···,xk−1,M(k−1)},则k时刻的目标状态随机有限集可以表示为Xk={xk,1,···,xk,M(k)} 。观测集可以表示为Zk={zk,1,···,zk,N(k)},观测到的目标数目可以表示为N(k)。
可以将k时刻的状态集Xk表示为随机集:

其中,Sk|k−1(x) 表示由k−1时 刻至k时刻时仍然存在的目 标 的 随 机 有 限 集;Bk|k−1(x) 表 示 由k−1时 刻 的 状 态x在k时刻衍生出的目标随机有限集; Γk表示在k时刻瞬间出现的新目标的随机有限集。
以此类推,观测集Zk也可以用随机有限集的形式来表示:

其中,Kk表示虚警或杂波产生的观测值的随机有限集,Θk(x) 表示由真实目标Xk产生的观测值的随机有限集[4]。
多目标系统需要满足以下3 个假设条件[3]:
1)每个目标运动过程与其产生的观测彼此相互独立;
2)由先验概率预测获得的多目标随机有限集(RFS)遵循泊松分布;
3)杂波的随机有限集遵循泊松分布,并且与目标所产生的观测的随机有限集相互独立。
PHD 滤波的基本递归方程如下:
式中:vk|k−1(·)表 示多目标随机有限集的预测PHD,vk(·)表示多目标随机有限集的更新PHD。更新PHD 函数vk(·)是一个单目标状态空间上的多峰值函数,对其积分可以获得所选区域内的目标的期望数,其物理意义是状态空间中目标个数的后验强度,其所对应的峰值即为目标状态,其峰值个数表示目标个数。
2.2 基于GM-PHD 滤波器的被动声呐目标跟踪方法
将GM-PHD 滤波器应用于被动声呐的目标跟踪,除了要遵循PHD 滤波器的假设外,多目标的线性高斯模型应包括新生目标、消失目标、一直存在目标的3 种情况。
被动声呐的观测范围为[0°,180°],目标状态变量用xk=[ak,]表 示,其中ak表示k时刻时目标的角度,表示k时刻目标的角度变化率。
在多目标的跟踪系统中,目标的运动状态模型遵循下式的线性高斯条件:

其中:fk|k−1(·|·)表 示单目标转移概率密度;N(·;m,P)表示均值为m;协方差为P的高斯分布;Fk−1表示状态转移矩阵;Qk−1表示过程噪声协方差。
目标的运动方程为:

其中,目标的状态转移矩阵Fk和噪声协方差矩阵Qk分别为:

其中,取T=1表 示采样时间,过程噪声标准差 σv=1 m/s2。
目标观测模型服从下式的线性高斯条件:

其中,gk(·|·) 表示单目标量测似然函数,Hk表示观测矩阵,Rk表示观测噪声协方差。
目标的观测方程为:

其中,观测向量zk=[θk], θk为声呐观测的目标方位信息,nk为环境噪声。
假设每个目标的运动模型和观测模型都符合线性高斯模型,各目标的存活概率PS,k(·) 和发现概率PD,k(·)相互独立,则基于GM-PHD 的被动声呐目标跟踪算法具体步骤为:
1)预测
假设在k−1时刻,多目标的后验强度(PHD)可以用高斯混合形式表示:

在k时刻,也可以通过高斯混合形式来表示预测的多目标强度函数(PHD):
其中,可以利用卡尔曼滤波分别推导得到存活目标和衍生目标的高斯分量的预测均值和协方差:

2)更新
根据卡尔曼滤波得到更新后的多目标概率假设密度(PHD)的高斯分量的特征参数如下:

由式(4)可得更新后的多目标概率假设密度(PHD)为:

其中:
3)合并与裁剪
在GM-PHD 滤波实现的过程中,随着时间的增加,后验概率的高斯项的数目会不断增多,所以需要通过对滤波后的高斯分量进行合并和裁剪来达到控制高斯项数目的目的[6]。可以通过设置合并阈值U,将两个欧氏距离在门限U内的高斯分量合并为一个;可以通过设置裁剪阈值T,裁剪掉权值低于T的高斯分量。
经过对高斯混合分量的合并与裁剪,可以估计目标的数目为分量的权值之和
2.3 基于GM-PHD 滤波的线谱跟踪方法
通过对多目标进行方位跟踪得到各个目标的方位信息后,对其进行功率谱估计,并进行频率归一化的计算,将标准化的频谱通过基于GM-PHD 滤波的线谱跟踪器进行线谱跟踪。
基于GM-PHD 滤波的线谱跟踪与2.2 节中方位跟踪的区别在于,将目标的状态变量用表示,其中fk表示k时刻时线谱的频率,表示k时刻时线谱的频率变化率,其预测与更新过程均与方位跟踪的过程相同。
3 试验数据验证
海试数据由拖曳式48 元均匀线列阵采样获得,试验过程中合作目标包含丰富的线谱成分,方向由68°向57°变化,同时存在约15 个干扰目标。图2 为宽带能量检测检测图,图中包含给出个多个目标的轨迹,在实际应用中很难快速找出感兴趣的窄带线谱目标。
GM-PHD 滤波跟踪算法对图2 数据的跟踪结果,如图3 所示。

图2 真实海试数据的宽带能量检测图Fig. 2 Broadband energy detection map of real sea trial data

图3 基于GM-PHD 滤波器的真实海试数据的跟踪结果Fig. 3 Tracking results of real sea trial data based on GM-PHD filter
通过对所选区域所有存在目标的方位进行线谱特征分析,可以找出感兴趣的威胁目标,其时间方位历程图如图4 所示。
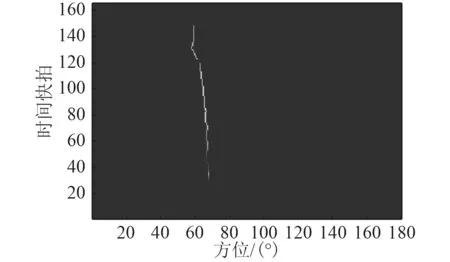
图4 威胁目标的时间方位历程图Fig. 4 Time-bearing gragh of the threat target
4 结 语
本文利用GM-PHD 滤波算法在复杂情况下的被动声呐的多目标跟踪时的良好性能,建立目标运动与观测的随机有限集模型,有效地跟踪了多目标的方位轨迹,验证了高斯混合概率密度假设滤波跟踪算法可以在强杂波的条件下,对多目标交叉邻近、新目标衍生或新生、目标突然消失的多目标复杂情况进行有效跟踪。
本文基于此实现了复杂情况下多目标中威胁目标方位的自动跟踪,成功获取了威胁目标的时间方位历程图,有望在被动声呐中得到工程实用。