果园施药关键技术研究进展*
2021-04-09牛萌萌方会敏康建明陈英凯彭强吉张春艳
牛萌萌,方会敏,康建明,陈英凯,2,彭强吉,张春艳
(1.山东省农业机械科学研究院,济南市,250100;2.山东省农业科学院,济南市,250100)
0 引言
农药施用对农业生产中的病虫草害防治具有重要作用,对作物产量提高具有重要意义。目前,中国农药的使用量和产量都居全球第一,每年使用农药原液30多万t(折百量),防治面积达4亿~5亿hm2[1],农药为农业生产带来巨大经济效益的同时,也给自然环境带来严重污染。我国果园面积近10年来不断增加,从2010年的10 681.02 khm2增加至2018年的11 874.87 khm2,同时我国水果产量由2010年的20 095.37万t增加至2018年的25 688.35万t[2]。林果业机械总功率由2012年21.15万台的100.33万kW增加至2018年46.32万台的163.76万kW,但相对于2018年农业机械总动力的100 371.74万kW占比还相对较少[3-4]。“农药化肥‘双减’行动”作为促进现代农业绿色高效可持续发展的重要手段得到了国家高度重视,现代果园管理需要高效施药机具,高效施药机具需要现代施药技术。
果园施药作为水果生产中的一个重要环节,其机械化程度直接影响水果生产机械化水平。本文在分析果园施药关键技术国内外研究的基础上,阐述归纳了喷头技术、气力辅助喷雾技术、静电喷雾技术、在线混药技术、自动对靶技术、变量施药技术、病虫害监测技术等方面的最新研究进展,并探讨了果园施药机械与技术发展面临的主要问题及对策,为促进我国果园施药机械与技术的创新发展提供参考。
1 果园施药关键技术研究进展
1.1 喷头技术
植保喷头是施药机械的关键部件,其性能的好坏直接决定喷雾施药的质量和效率。植保喷头分类方式众多,也较为复杂,一种喷头往往是几种不同喷头技术的综合(如表1所示),不同种类喷头其工作原理、雾滴特性和适用条件也都不尽相同(图1为植保喷头典型结构示意图)。Tembely等[5]运用基于最大熵原理(EM)方法对喷嘴喷射的雾滴谱进行了研究,推导出了可以适应多种工况环境的一种模型公式,对喷头雾化性能的研究提供了重要参考。Needham等[6]为实现分别控制药液喷雾量和雾滴尺寸大小,提出了采用比例电磁阀与喷头耦合的设计方案,实现了喷头喷雾量的变量控制。Parafiniuk等[7]研究了三种不同磨损程度(新的、磨损的、损坏的)的喷头,在喷雾量相同的情况下(通过降低喷雾压力来修正喷头磨损造成的流量增加,而喷雾压力的降低会造成雾滴粒径增大、雾滴均匀性变差)对作物生长情况和产量的影响,结果表明,新喷头作业下作物产量高于其他两种喷头。
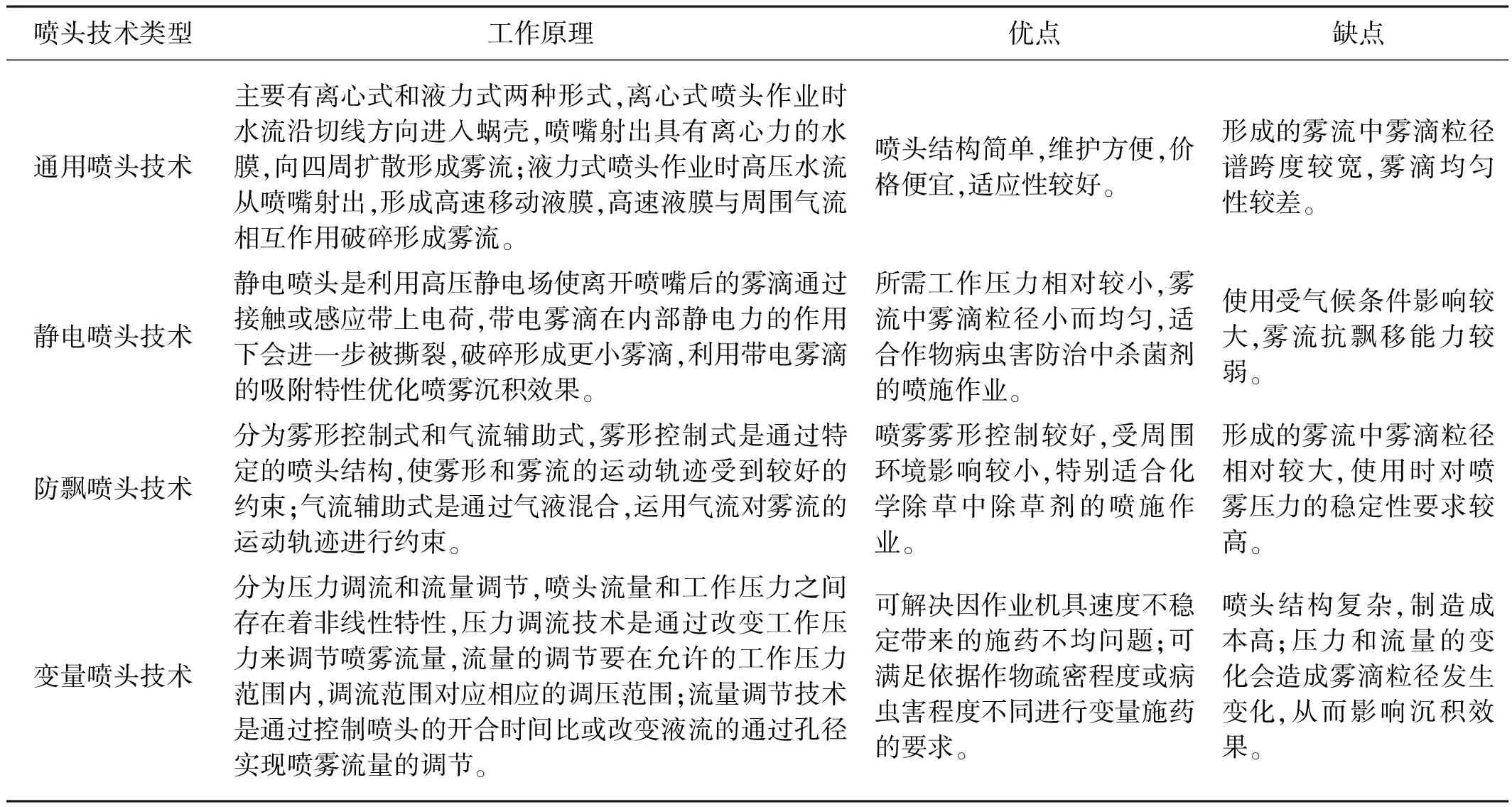
表1 各喷头技术工作原理及优缺点
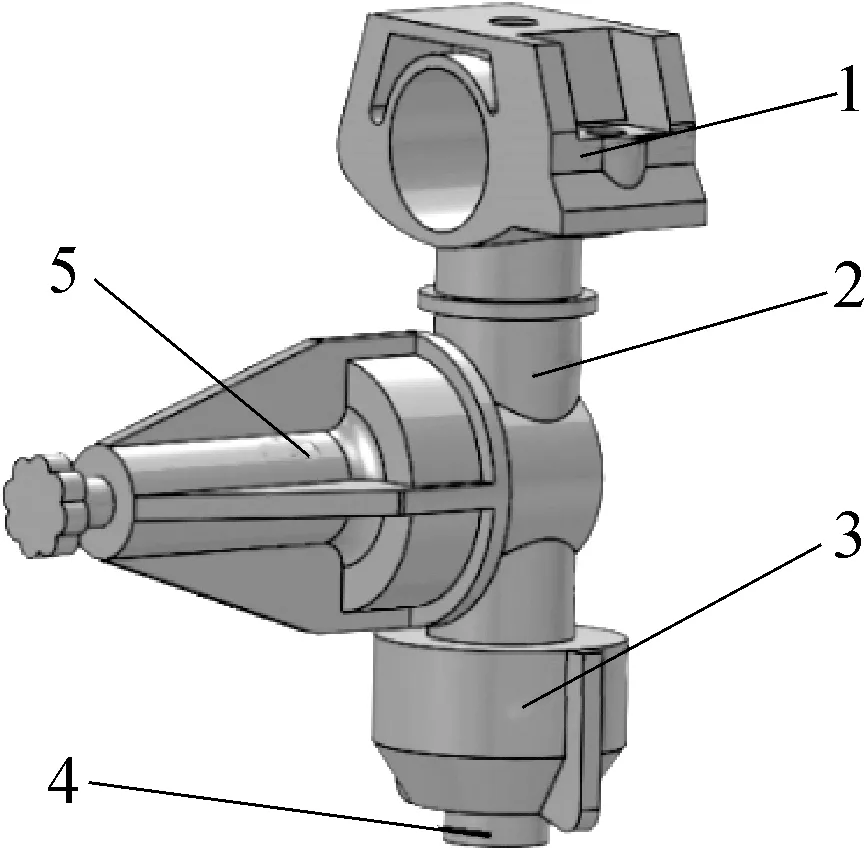
图1 植保喷头典型结构示意图
国内研究方面,茹煜等[8]针对具有离心雾化和液力雾化优点的旋转液力雾化喷头进行了喷雾特性试验研究,对驱动电机转速、喷雾工作压力、喷孔直径因素等对喷头喷雾沉积分布、喷幅、雾滴粒径和作业功耗的影响进行了试验探究,得出喷头旋转转速相比喷雾工作压力和喷孔直径参数对雾滴粒径的影响更显著,指出随着转速加大,雾滴粒径变小,雾化效果更好,同时喷雾角度变大,幅宽增加。金兰等[9]使用法拉第筒法、激光粒度仪和颗粒图像测速系统(PIV)探究了静电喷头充电电压、喷雾压力、喷嘴直径等参数对喷头荷电雾滴雾化流场、雾滴荷质比、雾滴粒径的影响,得出充电电压、喷嘴直径、喷雾压力3个参数对雾滴粒径分布的影响程度依次增强。樊荣等[10]为了实现植保常用扇形雾喷头的数字化管理及生成,对常用扇形喷头的喷雾质量、性能特性、结构组成进行了理论研究,对不同类型的扇形喷头进行了喷雾分布试验,建立了不同型号扇形喷头的型谱模型,制定了扇形喷头谱系结构,对喷头的系列化、规范化和标准化具有重要意义。董福龙等[11]基于撞击流和射流耦合作用原理,设计了一种对冲喷头,具有雾滴粒径均匀性较好、雾滴谱较窄、调压范围宽和抗飘性较强的特点。
国内喷头的设计和制造技术和欧美等发达国家还存在一定差距,这是制约我国喷雾施药水平的关键因素之一。目前,国外喷头设计主要根据喷头内部的流体力学设计理论,国内喷头设计以参考国外为主,针对其结构进行改进,以期达到所需的雾滴粒径、喷雾角、喷雾流量及喷雾分布等特性。同时喷头材料也是影响喷头雾化特性和作业稳定性的重要因素,其中材料的耐磨特性和耐化学特性及抗压特性是衡量喷头材料优劣的主要指标。国内外在喷头结构优化、变形设计、新材料、雾化机理等方面都进行了深入研究,并结合现代设计与分析技术,实现喷头研究过程中的虚拟设计和流场特征的数值模拟,有助于喷头的设计优化和实验验证。但针对喷头在新结构、新喷雾理论方面的创新研究相对较少,为应对现在喷雾技术的发展,具有特定功能和作用的喷头将会是喷头研究的一个主要方向。
1.2 气力辅助喷雾技术
辅助气流喷雾于20世纪末在欧洲兴起,利用气流的胁迫作用把药液雾滴输送到标靶上,提高雾流穿透性优化雾滴沉积分布,其中风送式喷雾系统工作原理如图2所示。康奈尔大学的Landers[12]研制了一种果园喷雾机,通过调节出风口的风栅可实现送风方向的改变,以达到更理想的雾滴沉积效果,他还分析了影响雾滴沉积和风场分布的各种因素,通过改变各种喷雾技术参数研究雾滴飘移和喷雾沉积情况。Patel 等[13]设计了一种感应式静电喷头与外部气流辅助相结合的远射程喷雾系统,通过高压辅助气流实现荷电雾滴的分散运动和均匀沉积,并指出辅助气流对雾滴荷质比没有显著影响。Kuznetsov等[14]结合试验数据,对气力喷头雾化过程的气液两相流场的数值建模方法进行了验证,数学模型使用湍流模型k-ωSST和雷诺应力模型(RSM),采用拉格朗日方法对雾滴流动进行数值模拟,比较分析表明,无论是亚音速流还是超音速流,计算结果和实验结果在定性和定量上具有较好的一致性。
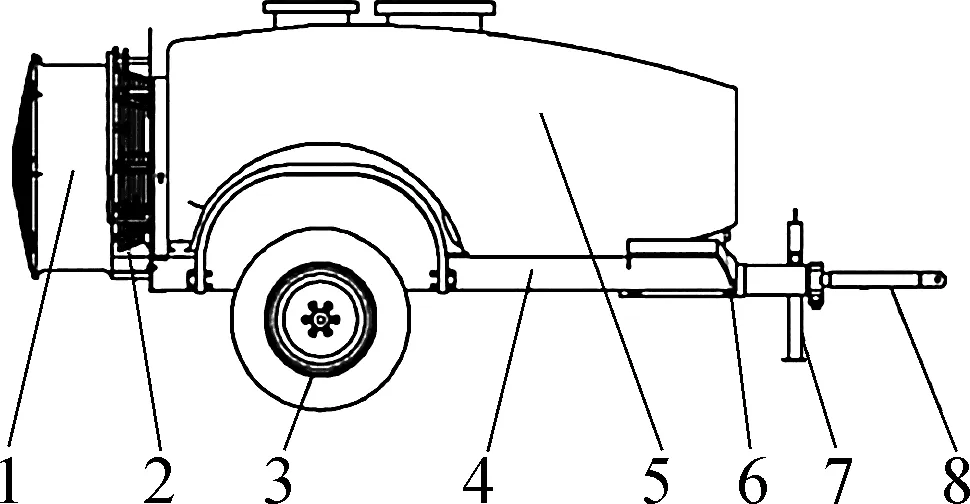
图2 牵引式果园风送式喷雾机
针对气力辅助喷雾技术国内开展了大量研究,唐青等[15]研究了标准扇形喷头和空气诱导喷头在高速气流作用下的雾化特性,试验结果表明两种喷头在高速外部气流作用下,雾滴粒径都随着风速的增加而减小,在喷雾压力0.3 MPa下,当风速由120 km/h逐步增加到305 km/h时,标准扇形喷头和空气诱导喷头的雾滴体积中径变化范围为210~130 μm、430~150 μm。宋淑然等[16]基于远射程风送式喷雾机研究了雾滴由喷嘴喷出后在风力的裹挟运动过程中雾滴粒径在喷幅内和射程内的变化分布规律,指出雾滴传输主要经历3个过程,近出风口处高速气流的破碎作用是雾滴粒径变小的重要因素,射程末端的低速气流中雾滴在扩散弥漫中因蒸发作用而使雾滴直径变小,在射程中部的中速气流下,雾滴柱中的卷吸作用使雾滴间发生聚合而形成粒径大的雾滴。吕晓兰等[17]基于果园风送式喷雾机研究了喷雾机导流板角度变化对外部气流速度场三维空间分布的影响,采用ICEM建立几何模型,并进行全结构网格划分,采用k-ε湍流模型进行了气流场的模拟仿真,探究了导流板角度不同对气流场的运动和气流分布的影响,给出了不同施药对象下导流板的较优布置角度。缪宏等[18]利用超声雾化技术设计了一台超声雾化气力喷雾装置,运用气流场和超声振动共同作用,实现喷头喷雾雾滴的进一步破碎细化,在超声发生器功率300 W,气压值0.05 MPa下,喷头的雾滴体积中径为33 μm,满足超低容量喷雾。李雪等[19]基于文丘里原理设计了一种农用气力式喷头,并采用k-ε湍流模型对喷头内部气流场进行了CFD仿真和试验验证,结果表明: 喷嘴出口处雾流中心区域的气流速度可达到亚音速或超音速,喷嘴出口处的气流速度随着两相压力的增加而增加,在0.05 MPa 的恒定水压和0.2~0.4 MPa的气压下,距离喷嘴出口1.6 m处,雾滴粒径65 μm以下的雾滴比例≥85%,喷头雾化的雾滴体积中径(D50)<50 μm,设计的气力喷头可达到较优的雾化性能。
上述研究可知,目前研究的气力辅助喷雾系统根据气流和雾流的混流方式和位置不同分为两类: 一类为风送式喷雾系统,气流和雾流在喷头外部混流在一起,雾流被气流携带进入果树冠层内部;另一类为气力式喷头喷雾系统,气流和雾流在喷头的内部混流在一起,高速气流的速度对雾流雾滴粒径的影响较大。其中风送式喷雾技术是目前果园施药中推广使用最好的喷雾技术,但目前推广使用的风送式喷雾机仍存在耗能大、质量重的缺点,且风机风量的精准控制也存在技术短板,不同果树冠层直径和冠层密度需要的送风风量不同,送风不足时雾流无法穿透整个冠层,送风过大则会加剧雾滴飘失。因此,研究实现变量精准送风是风送式喷雾机进一步发展的趋势。
1.3 静电喷雾技术
20世纪40年代,法国首次将高压静电技术应用于施药喷雾作业,其静电喷雾工作原理如图3所示。1999年Carlton[20]申请获得航空静电喷雾系统专利,后来专利权被美国SES公司(Spectrum electrostatic sprayers,Inc.)购买,并生产形成商业化产品。Patel等[21]设计研制了一种静电喷雾用的小型直流-直流高压变换器,利用9 V的直流蓄电池提供静电喷头所需的高电压输入,设计的高压系统在较高频率范围内输出稳定,在施加负载时具有较佳的纹波和压降。Salcedo等[22]设计了一种“П”型静电喷雾机,通过田间试验对比分析了“П”型静电喷雾机和常规“П”型喷雾机在针对葡萄施药时的雾滴沉积质量,试验得出静电喷雾对增加叶面雾滴沉积量和优化沉积均匀性都有显著作用;在实现药液等量沉积的条件下,静电喷雾可以节省68%的施药量。
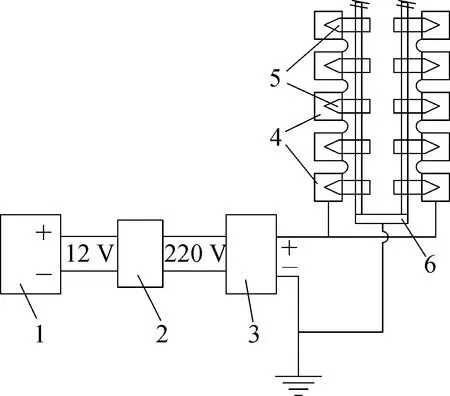
图3 静电喷雾工作原理
国内学者也开展了许多相关研究,张玲等[23]设计了一种空心圆锥雾仿形静电喷头,在喷嘴出口处雾滴形成区域依据雾流形态设计静电电极形状,并在电极外侧加设高压绝缘外套,使得雾流在静电区域内与电极始终保持最佳感应距离,获得最大静电感应电荷。杨洲等[24]采用室内模拟侧风探究了不同侧风和静电电压对静电喷雾飘移的影响,指出静电喷雾随着静电电压的增大,雾滴的飘失率和雾流飘移距离增大,并对雾滴粒径分布随静电电压的变化进行了测定和分析。崔海蓉等[25]研究了环形电极直径及其相对于喷头的布置位置对雾滴荷电效果的影响,结果表明,环形电极直径增大,雾滴荷质比减小;电极安装位置沿雾流运动方向前移,雾滴荷质比增加,并存在着一定的线性关系。岳德成等[26]基于背负式静电喷雾机通过田间试验研究了静电喷雾对2种玉米除草剂(40%乙·莠SE、30%苯唑草酮SC+90%莠去津WG+专用助剂)的减量施用效应,试验中施用量较各自推荐量分别减少36.67%和21.43%,仍可保持64%以上的株防效,而鲜重防效在95%以上,并可减轻除草剂对玉米产量的影响,相比人工除草减产分别只有1.96%和0.29%。
目前,静电喷雾的主要雾滴充电方法有感应充电法、电晕充电法和接触充电法,其中感应充电法相对于另外两种方式有相对较低的实现工作电压,在作业安全性和高压绝缘性方面存在优势。国内外对静电喷雾技术研究的深度和广度都达到了较高水平。但目前静电喷雾技术还存在电能消耗大;绝缘材料性能不达标,容易被高压静电击穿绝缘层造成漏电,严重时会危及操作者人身安全;工作性能不稳定,受环境因素影响较大;及供电系统维护不方便和喷头使用寿命短等都是制约静电喷雾技术使用和推广的关键因素。因此,在静电喷雾系统的研究中,高压供电系统的安全性和高效性、静电喷头的稳定性和耐久性等的研究,将是目前推动静电喷雾技术研究发展的关键。
1.4 在线混药技术
在线混药技术出现于20世纪70年代前后,1970年Amsdem[27]通过研究提出了农药在线混药技术,图4为外加动力直接注入式在线混药工作原理图。Vondricka等[28]对Hloben研制的检测在线混药过程中平均浓度变化的光纤光度传感器结构进行改进,使传感器嵌入混药器结构中,实现了在线检测混药浓度的功能。Hirschberg等[29]通过改进SMX静态混药器,使得流体经过混药器时的压降减少了50%,并利用CFD方法得到改进后混合器的压力谱、混药时间以及混合效果等信息。Sarvanan等[30]基于流体动力学分析了不同喷射位置、喷口直径等参数对射流混药器工作性能的影响,得出喷口直径大小对射流混药器的混合特性有重要的影响。Koller等[31]使用红外光谱法对混药过程中农药颗粒流与水流的混合过程进行了检测,但检测系统只给出了混合物中药和水的体积关联趋势,不能准确的给出混药浓度。Shen等[32]研制了一种采用微处理器控制的预混式直喷系统,用陶瓷活塞式化学计量泵和两个小的过渡罐,实现在线变量施药,与通常的将农药直接注入施药管道的系统不同,该系统首先将特定数量的水和农药注入预混室中进行搅拌混合,然后将混合物转移到过渡室中,最后按设定药量注入施药管。Cai等[33]利用快速反应电磁阀(RRV)设计了一种实时混药系统,通过100 Hz的脉宽调制(PWM)信号驱动,通过改变脉宽来调节药液的注入速率。同时,采用比例积分导数(PID)控制策略,实现了药液注入速率的计量和稳定。为了测量化学流量并将其作为实时反馈输入控制器,使用了一种与化学粘度无关的热力学流量计,并通过实验室测试对DNIS和PID控制策略的性能进行了评价,由于RRV具有非线性的输入输出特性,两相PID控制比单相PID控制取得了更好的控制效果。

图4 直接注入式在线混药工作原理图
通过技术引进与创新,国内开展了许多相关研究,贾卫东等[34]基于农药光透性设计了混药浓度检测单元、结合在线检测反馈采用PWM波占空比控制药液注入量,系统以MSP430F149单片机为核心的控制混药浓度,构建了混药比反馈控制的在线混药装置,试验表明,基于农药光透性的混药浓度在线检测、反馈控制的混药方法及装置可以实时获得混药浓度反馈信息,自动调节药液注入量实现混药浓度精准控制。邱白晶等[35]对射流混药装置射流嘴出口直径和面积比对在线混药喷雾系统混药性能的影响进行了深入研究,探究了24种不同结构参数的射流混药装置应用于3种不同流量特性的在线混药喷雾系统时的工作特性,结果表明,射流混药装置的结构参数对喷雾系统的工作状态具有显著影响,并指出可通过增大射流嘴进口直径或减小射流嘴出口直径、降低喷雾系统的阻力系数来避免药液回流。杨洲等[36]基于一种水动力比例自吸泵,设计构建了一种在线混药喷雾系统,并通过试验测定了在线混药系统的混药稳定性和均匀性的最大变异系数分别为3.51%和4.46%,系统结构简单混药稳定性好。李君等[37]采用蠕动泵和静态混合器相结合设计了一种农药精量控制的实时混药系统,通过试验验证了混药系统具有较优的混药稳定性和均匀性,并运用FLUENT软件进行混药过程仿真,采用SIMPLEC算法对设计的SK、SX和SD型3种静态混合器进行仿真模拟计算,模拟结果与试验数据进行了一致性对比。代祥等[38]基于多孔板穿过流脉动衰减原理提出了夹层孔管式新型混药器,对射流混药器进行了改进,探究夹层孔管式混药器在线混合瞬时均匀性与动态浓度一致性的规律,并对比普通射流混药器进行了在线混合试验,试验结果表明,夹层孔管式混药器显著地提高了脉动注入条件下的动态浓度一致性,但在瞬时均匀性上没有表现出明显优势。
在线混药方式将水和药分开,可避免预混药液的过剩浪费和药水混合液对液泵的腐蚀。以操作者安全和绿色环保为核心,符合农业可持续发展的要求,可实现农药的精准化、专业化、标准化施用。目前,在线混药方式主要分为两大类: 一类为外加动力直接注入式;二类为不需外部动力的射流混药式。外加动力直接注入式采用小流量调节阀或小流量变量泵通过外部动力源将药液注入到施药主流路中完成药水配比,混药比控制精度高、比例调节可控性好,但混药系统较为复杂,制作成本高。射流混药式采用高压高速流体的卷吸湍流效应无需外加动力,但存在混药比调节范围窄、控制精度低、可控性差等问题。目前,在线混药系统中,基于混药系统的控制算法和控制系统已经有了广泛和深入的研究,但混药关键部件和混药机理的基础研究还需要重视,稳定的小流量高精度电磁阀和小流量注药泵及混药比例可控稳定的混药器等关键部件的设计是打破现有在线混药技术瓶颈的关键。
1.5 自动对靶技术
20世纪70年代,前苏联和美国率先开始对自动对靶施药技术进行研究和试验。Lee等[39]利用机器视觉系统和自动喷雾系统相结合,开发了一种具有对靶喷施除草剂的实时智能杂草控制系统,机器视觉系统0.34 s处理一张图像,设计的对靶喷施杂草控制平台连续作业速度可达0.33 m/s。为提高除草剂的利用率和使用量,Tellaeche等[40]通过分析杂草和作物之间的光谱特征,形状和纹理的差异及杂草在作物间的不规则分布,设计了一种计算机自动视觉系统用于检测分布作物中的杂草,并通过自动喷雾系统实现对靶喷施。针对施药过程中果树冠层的差异性造成的施药分布不均。Gil等[41]运用超声波传感技术结合冠层体积算法,对目标物的几何形状和体积参数进行实时测定,基于测定的参数信息实时控制喷药量,并结合作物不同生长期进行了田间试验,与传统施药方式相比可节省农药21.9%。Yan等[42]利用激光传感技术选用270°径向激光扫描传感器结合设计的植物表面映射算法,对复杂形状植物表面和尺寸的检测精度进行了评估,试验测得物体到激光传感器的水平距离对精度影响显著,当之间距离越近影响越弱,物体表面的颜色和光洁度对传感器的检测精度没有明显影响,激光扫描传感器和设计的专用算法具有潜在的适应性,可以测量复杂形状的目标植物。
国内学者也开展了许多相关研究,赵茂程等[43]对树形识别系统及其与精确对靶施药系统之间的关系进行了理论分析,分析了由于树冠形状使得喷头与目标物之间距离的变化对喷雾分布的影响,指出各工作喷头喷出的农药雾滴到达目标时的重叠量的大小,对施药质量有显著影响,距离过大或过小都会造成喷雾量的不均匀分布或漏喷,而果树冠层之间的差异是带来喷雾距离变化的主要原因。王玲等[44]搭建了对靶变量喷药控制系统实验平台,侧重研究了目标果树识别方法,对靶系统由摄像头采集图像,经上位机图像识别及处理软件完成图像二值化处理、平滑图像边缘、提取果树轮廓,上位机将果树轮廓及以代码的形式发给下位机,下位机结合车速传感器及车与果树之间的距离,运算出树冠高度及喷雾装置的仰角,并进行反馈控制,上位机生成喷雾信息后与下位机进行通信,下位机控制执行机构对靶喷雾。为减少除草剂的使用量、提高有效利用率、降低环境污染,权龙哲等[45]研制了一种靶向灭草机器人,研究认为建立准确的药液喷洒雾滴群运动的动力学模型是提高对靶施药精度的关键,因此基于空气动力学原理建立了雾滴群运动过程的动力学模型,通过计算机数值模拟得出了液滴群的沉积分布特性,同时分析了液滴阻力特性及各工作参数对运动过程的影响。为实现美国白蛾幼虫网幕精准变量对靶喷药,减少漏喷与误喷,马长青等[46]基于机器视觉技术识别出美国白蛾幼虫网幕,然后根据美国白蛾幼虫网幕进行精准喷药,整个喷药系统由摄像头采集图像,计算机实时进行幼虫网幕的识别,并将采集分析的信息发送给控制系统,综合各种信息后,控制系统根据网幕的面积、位置和虫害严重程度,调整喷头移动到准确的喷药位置,确定控制系统的占空比,根据虫害的严重程度控制电磁阀的开闭来进行喷药,此系统还处在试验研究阶段。
自动对靶技术就是将目标探测技术和自动控制技术相结合运用到施药作业中。目前,施药系统中应用研究较多的目标探测技术主要有超声波传感技术、微波传感技术、光电传感技术和图像采集处理技术等,表2对各技术的工作原理和优缺点进行了总结。其中超声波、微波和光电传感技术根据声波、电磁波和光波遇到障碍物的折射和透射特性,通过测定折射量或透射量结合相应算法来实现目标物的形状、体积、密度的标定。图像采集处理技术通过目标物的形状、色差和边界效应,可达到目标物种类、部位和形态的识别能力,为精确定位和精确控制提供信息。超声波和光电传感技术在生产成本和复杂性上低于其他探测技术,有较好的农业应用推广前景。微波传感技术由于使用经济性差、实现控制技术复杂及受到通讯等限制,在农业机械上使用尚不成熟。图像采集处理技术由于图像识别处理速度还不能满足施药机具移动作业时所需的在线实时监测识别速度,其技术还处于试验研究探索阶段。
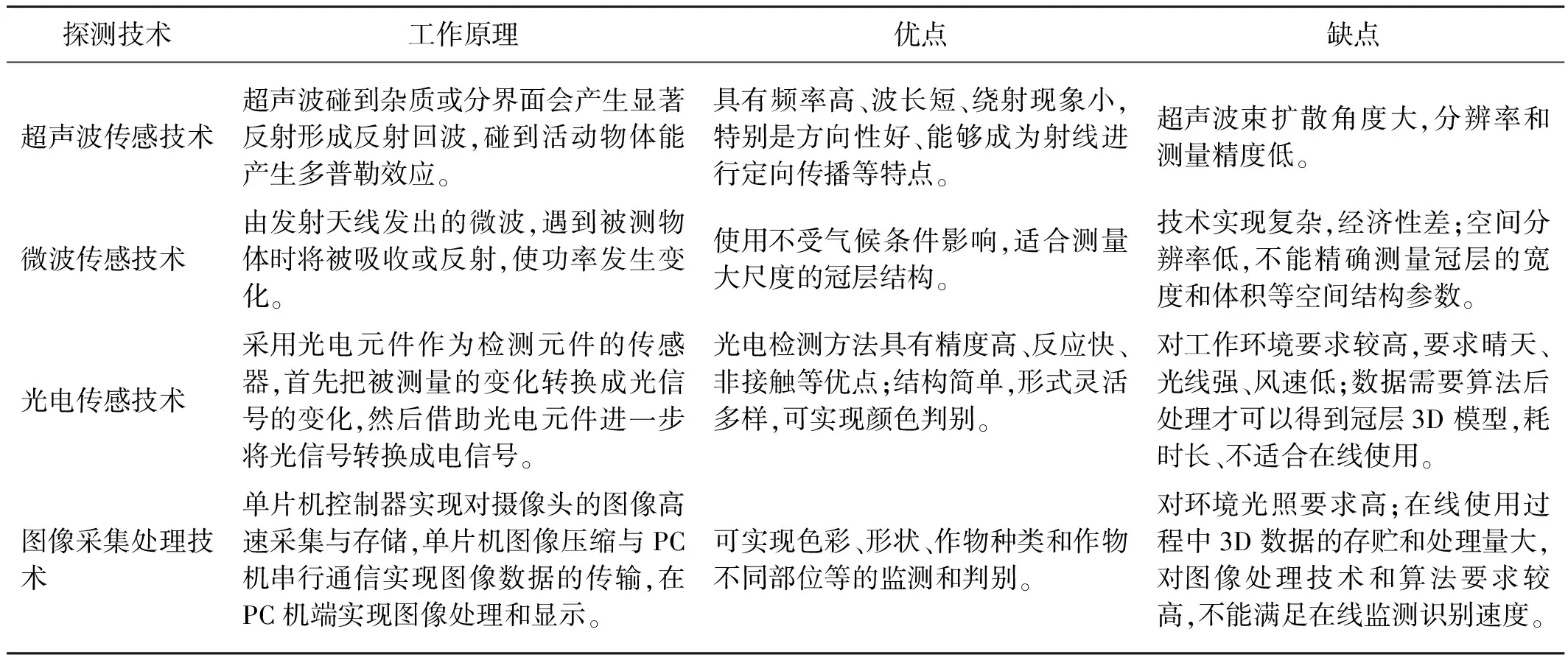
表2 目标探测技术工作原理及优缺点
1.6 变量施药技术
20世纪70年代,欧美等国开始进行农业变量施药技术的研究。Schueller等[47]探讨了空间变量施药的概念,描述了使用全球定位系统(GPS)或其他定位技术根据预先设定的地图位置信息进行农药的变量喷施。Dammer等[48]为避免农药的过量施用使得田间瓢虫的数量锐减,指出使用传感器技术实时测定田间作物的疏密情况,来控制杀虫剂的施用量,实现变量喷施,可减少杀虫剂用量约13.4%。Maghsoudi等[49]设计了一种用于树冠尺寸检测与估计的电子控制系统,运用三个超声波测距传感器来估计在三个不同高度和目标物的距离,采用梯度下降反向传播算法、切线-s形传递函数和3-7-6拓扑的MLP神经网络进行树截面的体积估计,实验表明,采用变量施药技术农药使用量减少了约34.5%。Li等[50]设计了一种基于超声传感器的果树冠层密度检测测试系统,依据果树冠层特征信息来控制风送式喷雾机的施药量和气流速度,采用时域能量分析法对超声信号进行分析,根据设计的已知密度三层和四层叶人工冠层进行了正交回归试验,得到了两个模型方程,其中四层冠层模型更为可靠。Campos等[51]指出果树冠层特征对精准、安全的确定农药喷适量至关重要,运用无人机上嵌入的多光谱相机对选定的试验区果树树冠特征进行了详细的采样,生成了处方地图,施药作业时变量喷雾控制系统基于冠层信息实现对施药系统的变量匹配控制。
国内方面,邱白晶等[52]对变量施药研究开展较早,为实现精准施药对喷雾时喷雾装备的位置确定、喷雾装备的速度测量以及系统压力测试和系统流量监测等核心技术进行了探讨,对定位精度的提高、处方图的精度匹配、喷雾滞后以及信息的采集和处理等存在的问题进行了相关讨论,指出实施变量喷雾所存在的主要问题是精度匹配,另外还有信息及时、快速采集以及软件开发等问题。针对脉宽调制(PWM)间歇喷雾式变量施药系统存在间歇作业,喷雾作业分布均匀性较难控制,魏新华等[53]采用高速电磁阀、比例溢流阀、TR80-05型空心圆锥雾喷头、隔膜泵和工控机测控系统等构建了一套PWM间歇喷雾式变量施药试验系统,在不同喷雾工作压力、不同PWM频率和占空比下,采用矩阵式分布雾量收集装置对PWM间歇喷雾作业时的静态雾量分布进行了测试。为了克服传统压力式和PWM控制式变量喷雾的缺点,徐艳蕾等[54]设计了一种多喷头组合变量喷雾系统,运用流体网络理论建立喷药网络的数学模型,分析了系统的流阻,试验测定实际施药量与理论值误差均小于10%。在变量喷雾系统的研究中,由于控制对象及控制算法尚不成熟,使得目前的精确供药系统很难满足动态变化的变喷量精确农药流量控制,张敏等[55]基于流量调节阀的开度及其两端压差决定其通流量大小的原理,对变量施药的节流控制系统进行了研究,利用Matlab中的BP神经网络函数对试验结果中的非线性关系进行了拟合和测试。王相友等[56]设计了一种多回流式变量喷药控制系统,由比例控制阀、安全阀、主阀和5路开关控制阀等构成,采用PID闭环控制算法对比例调节阀的开度进行调节,为缓解节流变量过程造成的液路压力波动,通过多回路流量控制来改变主路的流量,使测得的实际流量与理论流量尽量一致,从而改变喷药量。
近几年变量施药技术发展较快,其技术应用主要分为两个方向,其一为依据机具作业速度变化的变量施药控制方式,已实现单位作业面积的恒定用药量和药液均匀覆盖。其二为基于目标物的有无和目标物的形状、体积、密度及目标物的病虫害严重情况控制施药量,实现变量精准施药。前者实现其功能所需的技术水平相对较低,目前已进入产品应用推广阶段;后者需要先进的传感技术和图像监测识别技术支撑,且对于监测识别系统的监测、反馈、响应的快速性要求也高,技术还处于研究探索试验阶段。
1.7 病虫害监测技术
20世纪末,美国开始开展基于GPS的病虫害检测定点施药技术的研究。Gerstl[57]指出将土壤吸附数据与土壤有机质含量(SOM)进行归一化处理,可得到农药特有的,与土壤性质无关的吸附常数Koc,此常数可被用于对评估农药浸出潜力和吸附特性,综述了Koc和SOM值的变化及其对浸出指标的影响,并利用地理信息系统(GIS)和全球定位系统(GPS)绘制和存储数据,对依据土壤有机质的变化进行特定地点施用农药提供了手段。从作物保护和环境安全的角度出发,为实现精准施药,Smith等[58]指出结合遥感技术(RS)和传感器监测技术实现对田间病虫害的监测与定位,然后控制喷雾机实现定点施药。为实现作物病虫害潜在发生和分布的监测,Yuan等[59]提出了一种基于Worldview 2和landsat8卫星数据的农作物病虫害监测新方法,利用作物生长指数(GNDVI、VARIred-edge)和环境特征(weness、Greenness、LST)这5个指标作为表征作物病虫害方面的表现,试验测得,与仅基于植被指数的模型相比,同时包含植被指数和环境指数的FLDA模型能更准确地监测作物病虫害的发生。Hunter等[60]运用无人驾驶飞机(UAV)进行作物和害虫监测完成图像收集用于施药决策,将无人机病虫草害测绘和无人机施药结合到无人机集成系统(UAV-IS)中,提高无人机施药的利用率和效率,为实现农药的定点喷施提供新的选择。Tewari等[61]开发了一种基于病虫害检测技术的可变喷雾系统,采用基于色差的图像分割法对作物病害部位进行检测,并计算作物的病害严重程度,根据作物病害严重程度精确喷施化学农药,系统由网络摄像机图像采集系统、计算机图像处理系统、微控制器控制运行系统、电磁阀辅助喷嘴系统组成,系统可实现节约药量33.88%。
国内针对病虫害监测也有大量研究,冀荣华等[62]认为植物病害识别属于实时性较强的小样本模式识别,选择用支持向量机在解决小样本学习、非线性以及高维模式识别等问题中表现出许多特有的优势,在提取图像色彩特征色度矩的基础上,利用SVM对患有病虫害的植株进行病虫害监测识别,可获得较快的识别速度和较高的识别率。李小文等[63]依托GIS、RS、GPS、物联网、移动互联网、数据库等现代农业信息技术,研发一款宁夏枸杞病虫害网络化监测预警系统,使用终端传感器采集作物病虫害数据,通过GPS进行坐标定位,再通过网络将数据传输到控制端进行数据整合分析,系统实现了对宁夏枸杞种植的精准化作业和可视化管理、可以做到病虫害实时动态监测与早期预警。郭仲伟等[64]研究了基于遥感数据的森林病虫害监测,探讨了森林病虫害发生后森林中植被指数与叶面积指数之间的相关性的变化情况,分析了受病虫害影响后归一化植被指数(NDVI)、增强型植被指数(EVI)与叶面积指数(LAI)之间的相关性,得出受病虫害感染的像元在轻度、中度和重度三个严重级别中,NDVI与LAI之间的相关性由弱变强,又由强变弱;EVI与LAI之间的相关性则依次变强,研究为利用遥感数据识别作物病虫害情况、评价生态系统被影响情况提供基础,认为NDVI与LAI的相互关系能更好的反应森林生长和健康情况。由于传统无线网络数据连通性解决方案有限,史东旭等[65]探讨了基于物联网和大数据驱动的农业病虫害监测技术,借助于最新通信技术通过无人机、摄像机和传感器收集数据,通信系统采用TVWS(TV white space)和Lora(long range)相结合的技术来满足农业生产中高宽带和远距离数据传输的需求,并利用该系统对小麦田进行了监测,结果显示在气温偏低且降水偏高时,小麦长势偏弱,容易被病虫害侵入。
目前病虫害监测主要分为两个方向: 一是用于病虫害监测和防控的大范围病虫害在线定位监测;二是应用于智能喷雾机上的实时反馈监测。其中基于传感技术和遥感技术的大范围病虫害在线定位监测已经进入推广使用阶段,而用于智能喷雾机上的实时反馈监测由于对系统的监测、反馈、响应的快速性要求更高,技术还处于研究探索试验阶段。现有病虫害监测技术是根据监测植物病虫害所能表征出来的不同特征,包括监测光学、荧光和热学等参数及作物色差等来实现。传感系统分为可见和近红外光谱传感器(VIS-NIR);荧光和热传感器;以及合成孔径雷达(SAR)和光探测与测距(Lidar)系统。并通过统计判别分析,机器学习算法,回归模型以及光谱分解算法等将监测到的特征信息和数据与植物的病虫害联系起来。
2 果园施药技术研究推广亟需解决的问题
2.1 农机农艺融合不足
农机农艺关系问题由来已久,最开始是“农机要跟进农艺”,农机单方面的基于农艺来设计;后来提出“农机与农艺结合”,以农机适应农艺为主,农艺适应农机为辅;现在推行“农机农艺融合”,关键原则是农机作业标准和农业生产模式中技术标准要相互适应。
2.2 种植模式不统一
我国各地区果园的种植模式存在一定的差异,且大多依旧沿用传统的种植模式和传统的修剪、管理方式,使得作业机械难以进入果园,并且严重影响机械作业效果,导致果园植保机械的研究与推广难度增大。
2.3 通用技术和关键部件的创新不足
如先进的传感器技术、图像识别技术、专用喷头、高精度控制阀、小流量泵、专用风机等通用技术和关键部件的创新设计相对落后,基础理论研究与支撑不足。当前研究主要集中在运用智能识别技术、控制技术、信息技术等实现机具与施药技术的机电一体化、精准施药、智能对靶与防飘和开发新型机具等方面,而在施药关键部件的结构开发、新喷雾理论研究方面投入较少。
2.4 果园农机制造企业资金不足、技术创新能力较弱
目前国内果园农机制造企业多为中小企业,技术创新能力相对较弱企业资金不足,使得新技术、新材料及先进施药技术和关键部件的研究与推广应用产生脱节。
3 果园施药技术研究与发展对策
1)农机农艺的融合要结合实际,针对不同果品和不同地区要认清发展的主次。大宗果品生产作业中的主要问题是提高效益和降低劳动强度,在果园建造、种植模式选择和果园管理过程中,要尽可能的考虑农机作业的适应性。而针对特色农产品和特殊功能的果园,对果品品质要求严格、果品的附加值较高,可以在尽量满足农机和农艺相互适应的前提下研究推广相应的专用机具。
2)研究探讨先进的果树栽培和修剪新技术,培育和选育适应新型果园模式的果树新品种,将机械适用性作为品种选育和栽培管理的重要指标。还可以借助政府部门的力量推动果园新型种植模式和果树新品种的推广应用,要做好农业技术的科普工作,不断提高农民对农机与农艺融合的认知度,才能有效解决当前果园机械化发展与推广瓶颈。
3)注重基础理论研究,加强通用技术和关键部件的创新设计,增加在施药关键部件的结构开发和新喷雾理论研究方面的投入。要加大果园施药机械研究力度,加快果园植保机械的改良与推广力度,推动我国果园施药机械向专业化、智能化、信息化的方向发展,同时,要注重构建田间病虫害信息监测采集系统。
4)植保机械关键部件的制造要专业化、高精化,运用现代新设备、新技术、新工艺开发系列产品,提高关键部件的制造质量、工艺水平和可靠性,实现产品的专用化、系列化、标准化。此外,还要对植保机械的整机性能、主要工作部件的工作稳定性等进行研究和严格的试验检测,构建先进的试验场所,引进先进的试验技术,以更好地满足植保机械的发展要求。
4 趋势展望
目前我国果园大多依旧沿用传统的种植、修剪模式,受果园作业环境的约束和各地区果园种植模式差异的影响,使得大型施药机具难以入园,大中型果园植保机械的推广使用难度较大,小型机动式作业机具仍会是主流。结合国内外先进技术,做好农机农艺融合,研究适合我国果园种植模式和规模的植保机械,以提高我国果园机械化作业水平,促进果园种植业的健康、持续发展。果园施药技术研究和发展的趋势主要表现在以下方面。
1)多技术融合提高施药效率。在满足病虫害防治需求的基础上,追求最小的农药施用量,确保最少的农药流失到环境中依然是未来果园施药技术研究的热点。为了提高农药利用率、减少施药污染,施药技术已经走上多技术融合的发展方向,向着低容量、超低容量、变量和智能施药方向发展,研发具有精准化、智能化、无人化功能的果园施药机械是研究发展的重点方向。如静电技术与气力辅助技术的融合,使得雾滴粒径分布特性、沉积均匀性和抗飘移能力等都得到了有效提升;在线混药技术、变量施药技术和自动对靶技术的融合,实现果树形态识别和株间识别,通过需药量自动调节施药量,实现智能精准施药;病虫害监测技术、变量施药技术和自动对靶技术的融合,实现施药过程中病虫害的实时监测,确定病虫害的严重等级,通过在线监测反馈信息控制完成定点变量精准施药;气力辅助技术与循环喷雾技术的融合,使喷雾、沉积过程在一个半封闭的空间内进行,提高了药液利用率,同时由于增设气流辅助进一步优化了雾滴沉积分布。
2)各关键部件的变量精准控制。随着喷雾技术的不断发展,对喷头在性能、结构、功能方面有了更高的要求,研究具有特定功能、可实现喷雾量和喷雾角精准控制的喷头将会是喷头未来研究的一个主要方向;喷头与目标物距离是改善施药效果的重要指标之一,为保证每个喷头相对目标物的喷雾距离一致,且处在最优范围内,开展喷架仿形机构确保喷头位置与冠层距离相一致,实现喷头位置的在线调整和精准控制是未来的研究方向之一;风量是关乎药液沉积与飘移的重要因素,不同果树冠层直径和冠层密度需要的送风风量不同,研究风量在线快速调节装置实现变量精准送风是果园风送式喷雾机进一步发展的趋势;在线混药技术实现的关键在于注药量的精准控制,稳定的小流量高精度电磁阀和小流量注药泵及混药比例精准可控的药液注入系统等的设计是打破现有在线混药技术瓶颈的关键;要实现依据目标物的物理特征,及目标物的病虫害严重情况的精准变量施药,对目标物的特征进行准确快速识别是前提,因此,研究具有快速监测、反馈、响应性能的监测识别系统及相应的计算和决策模型,是智能精准变量施药的重点研究方向。
5 结论
果园施药技术应用日趋成熟广泛,本文分别从喷头技术、气力辅助喷雾技术、静电喷雾技术、在线混药技术、自动对靶技术、变量施药技术、病虫害监测技术等角度出发,分析了国内外果园施药关键技术的研究进展。从文献分析可以看出国内外研究人员对各施药关键技术已进行的了大量的试验和理论研究,并运用虚拟仿真技术进行全因素的数值模拟和分析,研究主要集中在运用控制技术、传感器技术、图像处理技术、信息技术和智能识别技术等实现施药机具的机电液一体化、变量施药、智能对靶精准施药、病虫害监测识别和新型机具开发等,而各关键技术的基础理论和关键部件的新结构开发等方面研究支撑不足。
受国内果园种植规模和种植模式的影响,国内果园植保机械以中小型为主,同时受果农购买能力的限制,其制造成本被压缩的较低,先进技术的应用和推广受到很大约束。其中,农机农艺融合不足,种植模式不统一,通用技术和关键部件的创新不足,基础理论研究与支撑不足,果园农机制造企业资金不足、技术创新能力较弱等因素是目前制约国内果园施药技术与机械发展的主要问题。
进一步做好农机农艺的融合,将机械适用性作为品种选育和栽培管理的重要指标;注重施药相关技术的基础理论研究,加强通用技术和关键部件的创新设计;推进植保机械关键部件制造的专业化、高精化,实现主要部件的专用化、系列化、标准化。随着果园施药机械的发展,多技术融合和关键部件的变量精准控制将是果园施药技术研究和发展的趋势,在实现果园施药机械化和自动化的前提下,进一步提高精准化、智能化及信息化水平,从而促进水果产业向绿色、生态、可持续方向发展。