葡萄清土与防寒布回收机械化技术研究现状与展望*
2021-04-09牛丛马帅徐丽明袁全春王烁烁袁训腾
牛丛,马帅,徐丽明,袁全春,王烁烁,袁训腾
(中国农业大学工学院,北京市,100083)
0 引言
中国葡萄种植历史悠久,截止2017年底中国葡萄种植面积为870 khm2,产量为1 308.3万t,分别占全球葡萄总面积和总产量的11%和19%,葡萄种植面积和产量均居世界前列,在世界众多葡萄生产国中占据重要地位[1]。中国葡萄种植主要集中在北方[2-3],种植面积约占全国种植面积的四分之三。由于北方葡萄产区冬季寒冷干燥且多风,容易造成葡萄藤冻害和风干,因此多采用埋土方式使葡萄藤安全越冬,第二年春天清理葡萄藤上方覆盖的防寒土并重新上架[4-6]。埋土防寒模式不利于后续清土作业,葡萄藤在土垄中分布复杂,现有葡萄清土机很难将覆土清理干净,且容易损伤葡萄藤。新疆作为中国葡萄生产第一大省[7],葡萄种植面积和产量约占全国的1/5,近年来,当地葡萄园改变传统的埋土防寒模式,采取防寒布辅助埋土防寒以便更好地进行春季清土作业。防寒布辅助埋土防寒模式即将防寒布铺放在下架捆绑好的葡萄藤上,再以10~30 cm厚度的土壤覆盖压实[6],该防寒模式比埋土防寒能够起到更好的保温保墒作用[8-14];此外,可通过回收防寒布将覆土基本清理干净并减少葡萄藤的损伤。因此,防寒布辅助埋土防寒的效果和影响均优于单一埋土防寒。
防寒布辅助埋土防寒模式仍处于推广应用早期,北方葡萄种植区仍以埋土防寒为主,故现有作业机械以清土为主,很少涉及防寒布的回收,且作业效果不显著,通用性较差。春季清土与防寒布回收作业仍以人工作业为主[8],劳动强度大,效率低下,成本高,且葡萄清土起藤作业环节时效性强,过早过晚都不利于葡萄生长,因此亟需研究切实可行的葡萄清土与防寒布回收机。本文阐述了国内外葡萄清土与防寒布回收机的主要类型、工作原理及特点,介绍了关键作业部件的主要类型、作业原理和特点,从农艺与农机两个方面提出了机械化发展的制约因素和现有机具存在的问题,并提出了相应的解决措施,为葡萄清土与防寒布回收机的发展提供参考与借鉴。
1 葡萄清土与防寒布回收机研究现状
1.1 国外研究现状
国外葡萄主产国如法国、意大利、美国等地区,主要集中在温带及亚热带区域,全年气候温和,适宜葡萄生长,因此葡萄产业发展较早,形成了统一、规范的种植和管理模式,从而促进了机械化、自动化生产装备的应用与发展,主要集中在收获与植保等领域[15-16]。由于其冬季不会造成葡萄藤冻害和风干,因此不需要进行冬季埋藤和春季清土起藤作业,故未见葡萄清土和防寒布回收机的相关研究[17-19]。
1.2 国内研究现状
由于防寒布辅助埋土防寒模式推广应用并不普及,故葡萄清土与防寒布回收机种类较少,根据防寒布卷收辊位置主要分为2类,第1类为垄上作业机械,卷布辊位于防寒土垄正上方;第2类为垄行作业机械,卷布辊偏离土垄,基本位于葡萄行间。
1.2.1 垄上作业机械
垄上作业式葡萄清土与防寒布回收机的特点是清土彻底,防寒布卷收平整,但清土机构与防寒布卷收机构必须协同作业,任一机构都无法单独完成全部作业过程。若无清土机构连续清理防寒土,防寒布会因其前方壅土过多导致卷收阻力过大而被拉断;若无卷布机构将防寒布上方覆土持续输送到清土部件的清土范围内,则会导致清土不彻底。
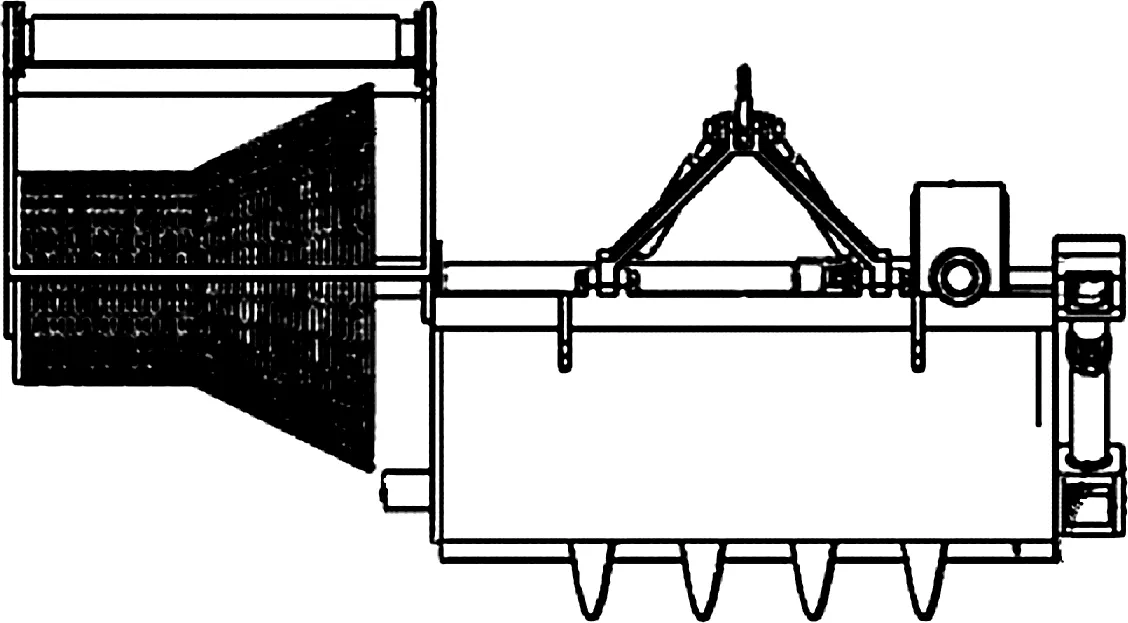
甘肃农业大学的谢冬等[20]设计了一种葡萄藤清土机,结构如图1所示。
(a)主视图
拖拉机通过三点悬挂与机具相连,拖拉机输出的动力经变速箱分别驱动横向输土搅龙、径变搅龙和棚膜卷收杆转动。作业前,人工将防寒布一端缠绕在棚膜卷收杆上;作业时,拖拉机牵引机具前进,棚膜卷收杆转动卷收防寒布,张紧的防寒布将其上方覆土向正前方推送,防寒土透过保护网孔隙被径变搅龙输送到行间,横向输土搅龙将清理到行间的防寒土均匀平铺在行间。该清土机作业效果较好,清土较为彻底,能够实现防寒布的卷收且不易损伤葡萄藤;但随卷布辊外周直径变大,线速度逐渐增大,行进速度难以与其相匹配,可能造成防寒布上壅土过多使其卷收阻力过大,或卷收速度过快而被拉断;不同葡萄地土垄形状尺寸各异,保护网结构固定,适应性差,导致清土不彻底。
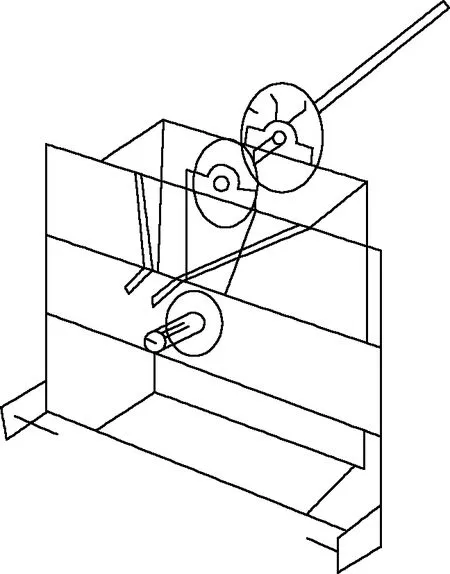
新疆农业大学的刘松[21]设计了一种圆锥螺旋式入春葡萄挖藤机,结构如图2所示。拖拉机通过三点悬挂与机具相连,拖拉机输出的动力经变速箱直接驱动圆锥螺旋搅龙旋转,地轮通过链传动带动收膜辊转动。作业前,人工将防寒布一端缠绕在收膜辊轴上;作业时,拖拉机牵引机具前进,地轮转动带动收膜辊轴转动卷收防寒布,张紧的防寒布将其上方覆土向前推送至圆锥螺旋搅龙的清土范围内,直径中间小两端大的圆锥螺旋搅龙转动将防寒土连续输送到两侧行间。该机具与谢东等[20]设计的葡萄藤清土机结构和作业原理相似,清土较为彻底,但圆锥螺旋搅龙外侧没有保护网,触藤时容易损毁防寒布并损伤葡萄藤;若防寒布上方壅土过多导致卷收阻力增大时,地轮容易停止转动,无法正常卷收防寒布;随收膜辊外周直径增大,线速度增大,同样存在与行进速度不匹配问题。
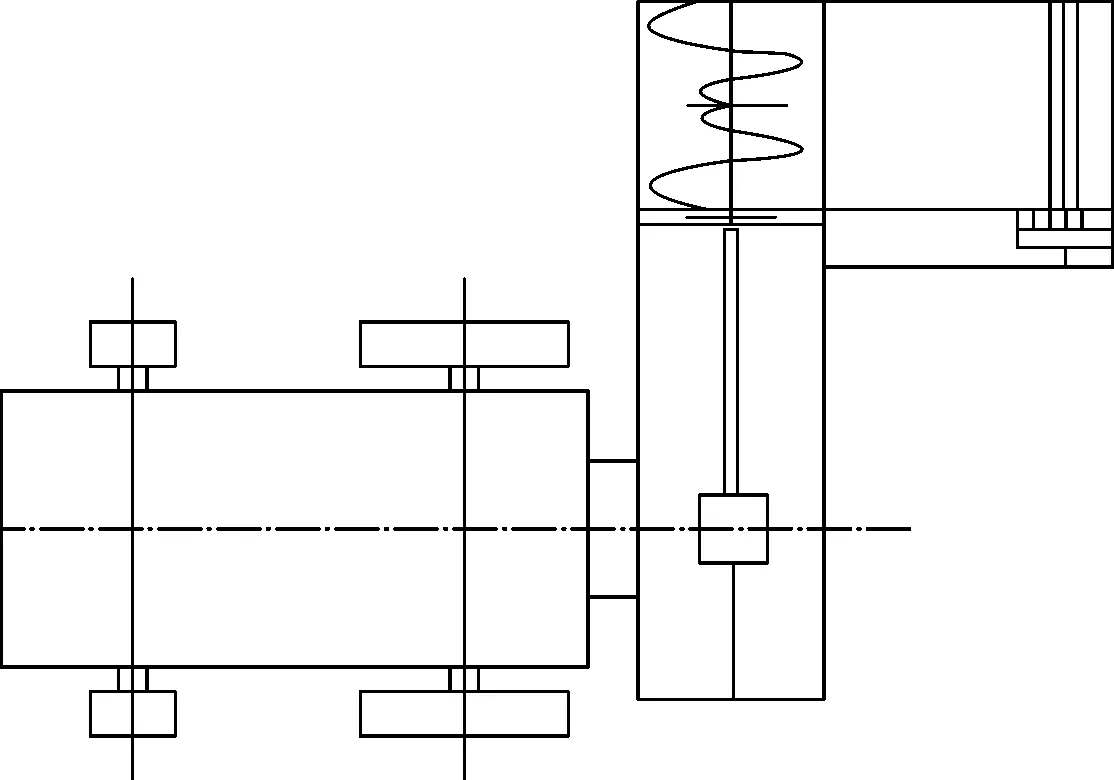
图2 圆锥螺旋式入春葡萄挖藤机
中国农业大学的徐丽明等[22]设计了一种葡萄埋藤用的彩条布清土回收机,结构如图3所示。拖拉机通过三点悬挂与机具相连,输出的动力通过带传动驱动液压泵工作,将机械能转化为液压能分别驱动清土搅龙和卷布辊转动。作业前,人工将彩条布一端缠绕在卷布辊上;作业时,拖拉机牵引机器前进,刮土铲首先清理上层覆土,卷布辊转动卷收防寒布,毛刷辊清理粘附在彩条布上的覆土,张紧的防寒布将其上剩余覆土向正前方推送,清土搅龙将进入清土范围的防寒土连续输送到行间。该机具作业部件由整套液压系统驱动,成本高,消耗动力大。该机具与前述两种垄上作业机械[20-21]的结构和原理相似,刮土板清除上层覆土为后方搅龙清土和防寒布卷收减轻阻力;以整套液压系统驱动作业部件,结构复杂,成本高;刚性清土部件与防寒布直接接触,易损毁防寒布并损伤葡萄藤。
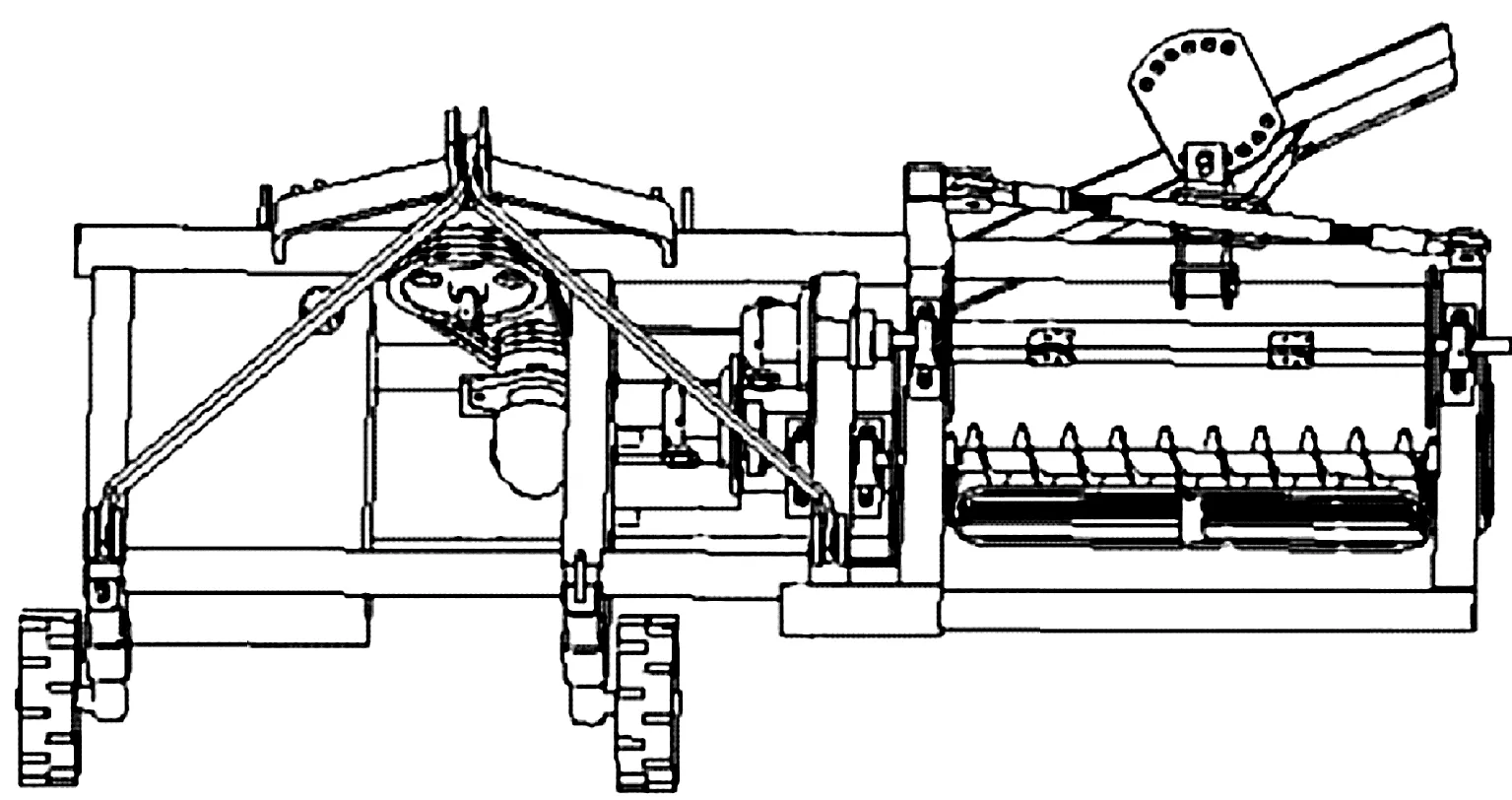
图3 彩条布清土回收机
作业方式决定了不同垄上作业机械的结构与工作原理相似,且结构较为单一,只有连续横向输送防寒土的搅龙与卷布辊配合才能完成葡萄清土与防寒布回收作业;其他形式清土部件仅辅助清理防寒土,减轻防寒布卷收阻力;水泥柱一侧埋藤是采用防寒布辅助埋土防寒模式的前提,而现有的垄上作业机械均为单边作业机械,作业返程时存在空行程、空跑行问题,浪费时间和动力。
1.2.2 垄行作业机械
垄行作业式葡萄清土与防寒布回收机的特点是清土彻底,防寒布卷收机构可单独完成清土和防寒布回收两项作业,但防寒布不易卷收平整,且对防寒布质量要求较高。
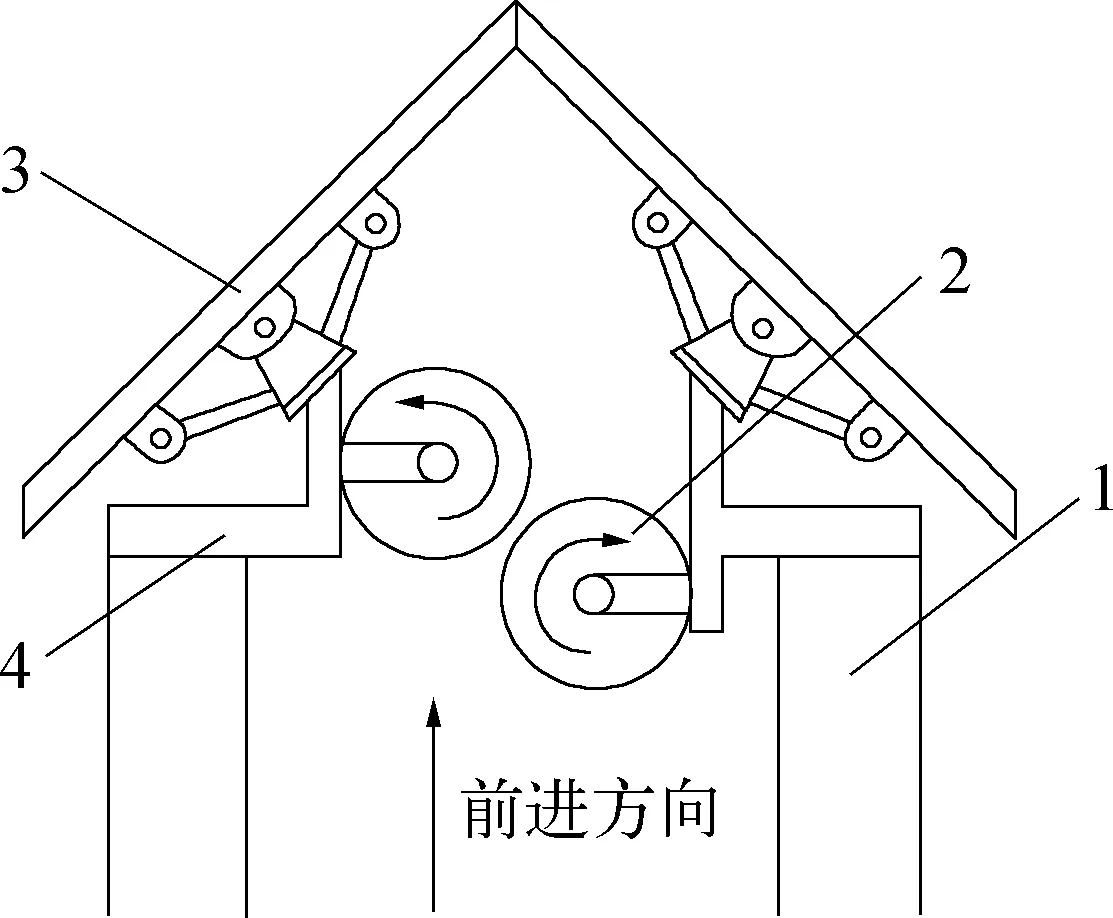
中国农业大学的牛丛等[19]研制了一种篱架式葡萄藤冬季埋土清除与防寒布回收机,结构如图4所示。
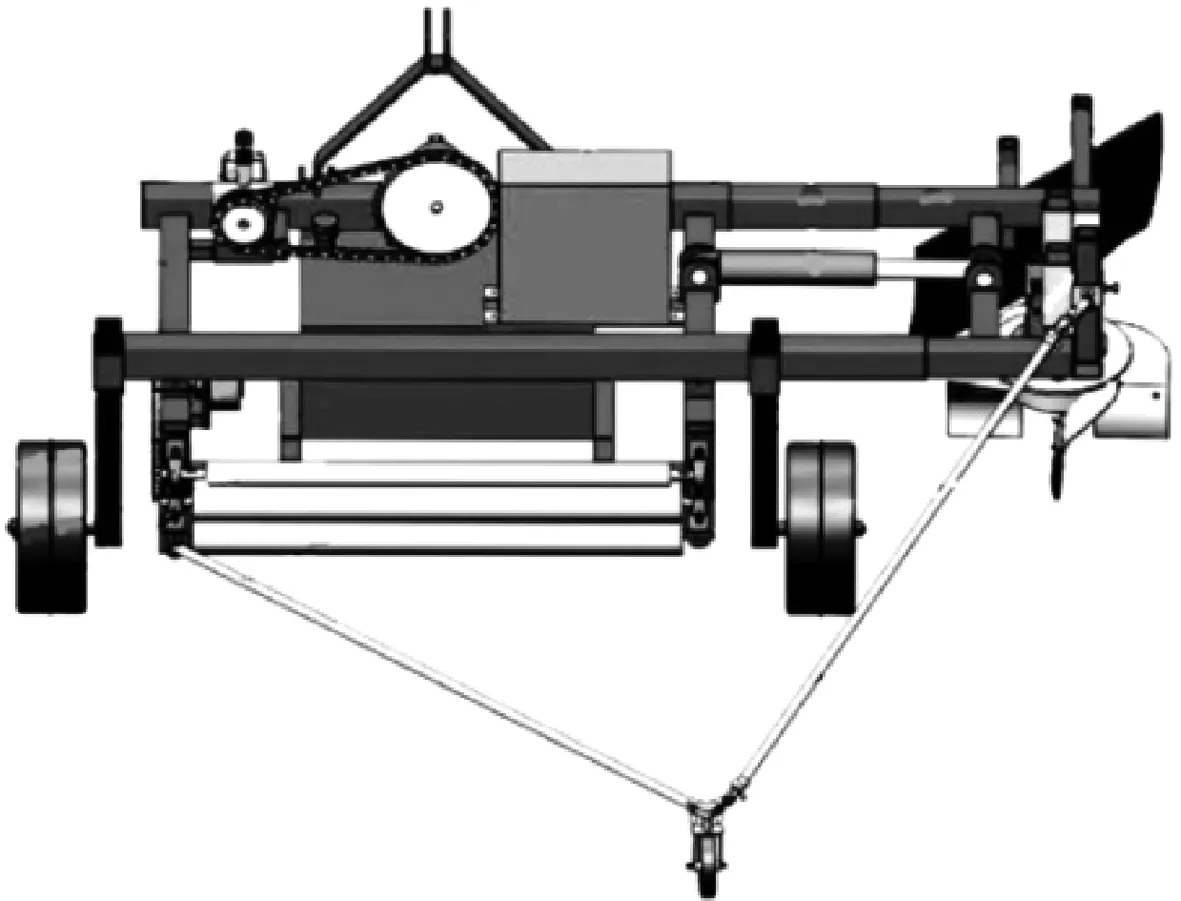
图4 葡萄冬季埋土清除与防寒布回收机
拖拉机通过三点悬挂与机具相连,输出的动力通过带传动驱动液压泵工作,将机械能转化为液压能驱动清土马达、卷收马达和液压缸工作。作业前,人工将彩条布一端从后方穿过换向支架,穿过两个清土毛刷辊缝隙缠绕在卷布辊上;作业时,拖拉机牵引机器前进,刮土板首先清理葡萄藤上方覆土,清土叶轮转动进一步清除上方覆土,卷布辊转动卷收防寒布,毛刷辊清理粘附在彩条布上的覆土,张紧的防寒布将其上剩余覆土倾斜拉扯到行间。该机具通过换向支架将防寒布由葡萄藤正上方平行换向到卷布辊正后方,便于实现防寒布的平整卷收,但防寒布在卷收时受力不均匀,容易在换向支架拐角处堆积,且卷收辊转速难以与行进速度相匹配,不易实现防寒布的平整卷收;清土部件清土量大,为防寒布回收减轻阻力,但刚性部件容易损坏防寒布并损伤葡萄藤。
2 葡萄清土与防寒布回收机关键部件分析
2.1 清土机构
针对垄上作业式葡萄清土与防寒布回收机,防寒布仅向作业前方推送防寒土,防寒土清除均由清土机构完成,要求防寒土从清土机构作业前方和后方均能进入其清土范围,清土机构受作业方式影响较大,结构较为单一,常用螺旋搅龙式[20-22]清土部件。针对垄行作业式葡萄清土与防寒布回收机,其清土机构只需清理部分覆土,防寒布辅助清理剩余覆土,清土机构受作业方式影响较小,可采用葡萄清土机常用的清土机构,结构多样,包括刮板式、链板式、旋转式、气吹式和组合式等。
2.1.1 刮板式清土机构
刮板式清土部件结构简单,操作方便,作业速度较快,应用较为广泛;但清土不彻底,且为刚性结构,作业时容易刮伤葡萄藤。
白洪君[23]设计了一种防阻振动式清土铲,结构如图5所示。作业时,拖拉机牵引机器前进,地轮转动破碎板结的表层土;振动器使清土铲边振动边入土;清土铲触碰到葡萄藤时受到阻力增大,在弹簧作用下向后上方弹起避开葡萄藤,减少对葡萄藤的损伤。该清土铲结构简单,操作方便,利用振动器产生振动入土效果,可减轻入土阻力;但弹簧式缓冲避障机构在葡萄藤分布复杂的土垄中避障减损效果不显著,且该清土铲仅清理葡萄藤上方覆土,在有水泥柱的葡萄地里难以应用。
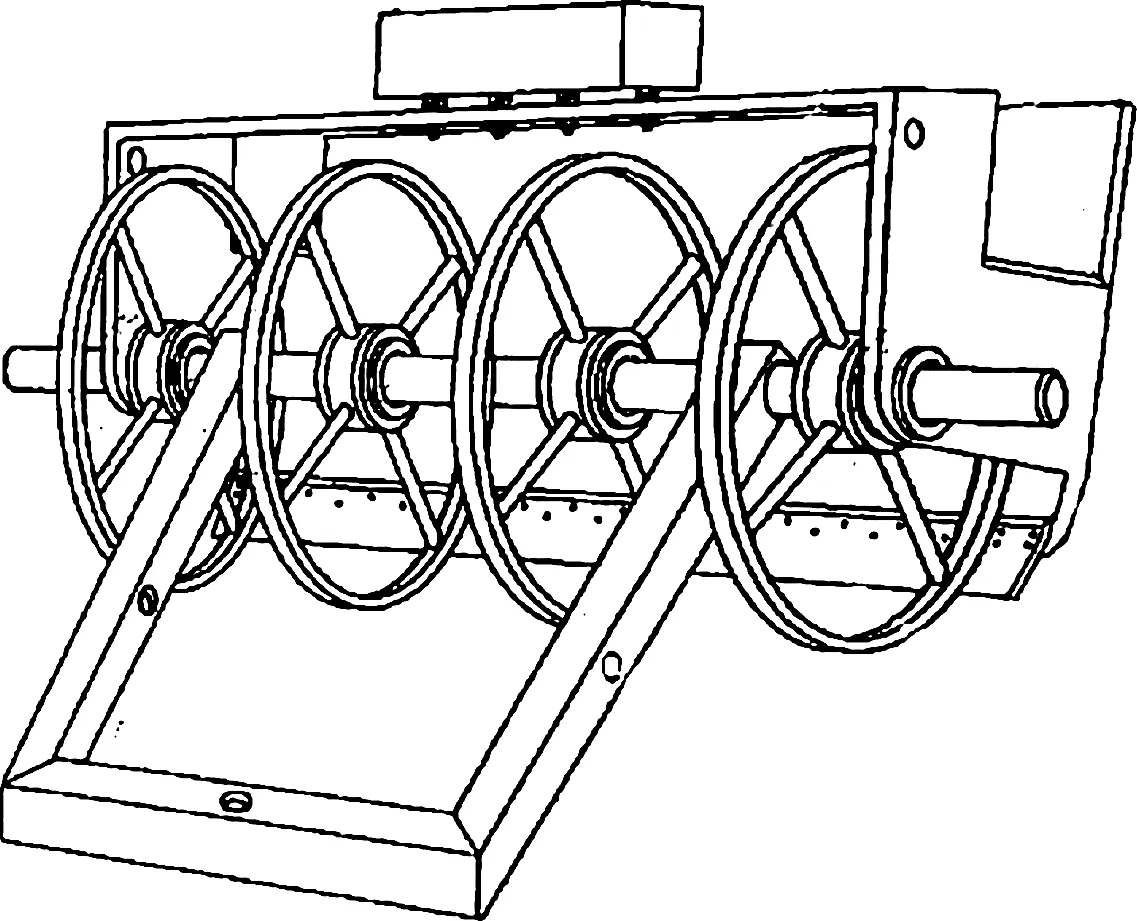
图5 防阻振动式清土铲
宁夏工商职业技术学院的曾保宁等[24]研制了一种葡萄起藤机,整机呈对称结构,如图6所示。作业时,拖拉机通过三点悬挂与机具相连接并牵引机具前进,前部的左、右铲土犁将土垄行内侧的土切下并向行间翻垡,后部的左、右刮板将土垡向行中间推送、起垄或整平。该起藤机为双边作业机械,适用于水泥柱间埋藤的葡萄园,清土效率较高;但作业幅宽不随土垄形状和位置的变化以及机具直线行走的偏差而调整,清土不彻底,容易损伤葡萄藤;拖拉机手需要同时兼顾两侧清土状况,对驾驶技术具有较高的要求。
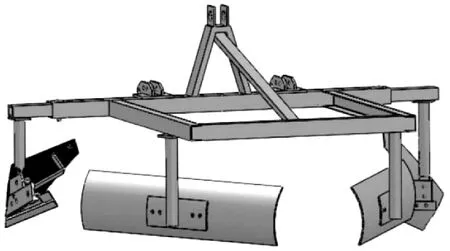
图6 葡萄起藤机
陈智等[25]设计了一种葡萄藤自动避让全向除土机,结构如图7所示。作业时,拖拉机通过三点悬挂与机具相连并牵引机具前进,液压缸伸缩以调节侧边刮板的左右位置、柱间刮板的作业角度以及限深轮的高度;侧边刮板将土垄侧边土刮至左侧行间,柱间刮板将土垄上方土刮至右侧行间;当障碍物探测装置检测到水泥柱时,避障油缸伸缩调节柱间刮板作业角度实现避障作业。该机具结构较为简单,适用于水泥柱中间埋藤的葡萄园,可同时清理葡萄藤上方覆土和侧边覆土,清土范围大;整套液压系统仅驱动液压缸伸缩,成本较高,且刮板为刚性部件,容易损伤葡萄藤。
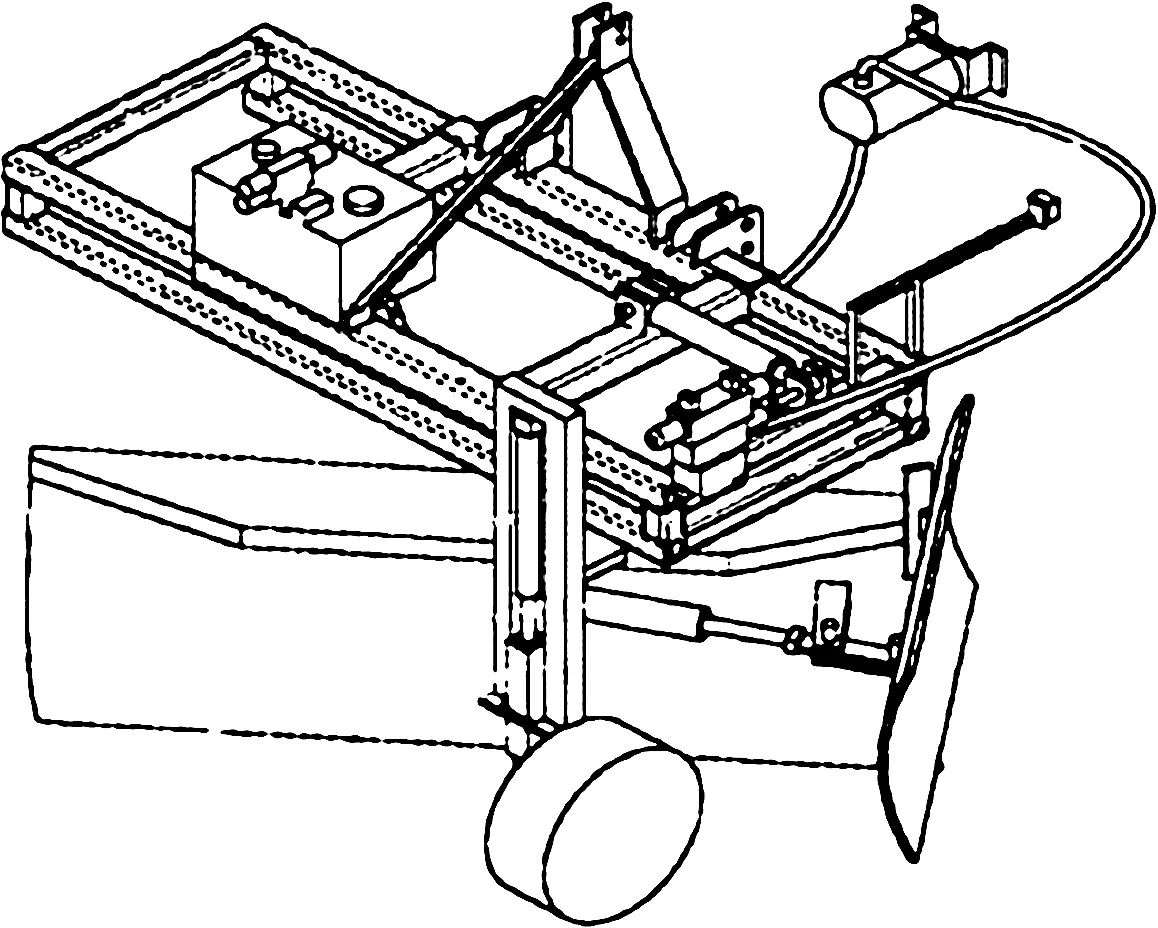
图7 葡萄藤自动避让全向除土机
部分地区采用往复式刮板进行清土作业,如图8所示。

图8 往复式刮板作业示意图
刮板的往复动作由液压缸驱动,人为控制刮板作业位置和深度。作业时,人工操作液压阀控制液压缸伸缩,带动刮土板实现高推送、低收缩的往复动作,以刮除土垄上方覆土并减少推动过程中对葡萄藤的损伤,清土量较大。但刮板作业位置和深度的控制受人为因素影响较大,作业不稳定,容易损伤葡萄藤;作业时需要协调控制多个液压阀,操作不易;刮板的往复动作中推送为空行程,降低了作业效率;清土作业为间断式,作业速度较慢。
2.1.2 链条式清土机构
王茂博[26]设计了一种链条式葡萄覆土清除机,利用链条原理在链条外周安装刮板构成清土链板,结构如图9所示。作业时,拖拉机通过三点悬挂与机具相连并牵引机具前进,液压缸伸缩调节清土臂的位置,使清土链板处于合适的作业位置,拖拉机输出的动力经主动轴和链传动驱动清土链板工作,其上刮板将葡萄藤上方覆土清理至行间。该清土机为双边作业机械,适用于水泥柱间埋藤的葡萄园,清土量大;但防寒土难以进入清土链板的清土范围造成防寒土壅积,且作业速度受链板转速限制,转速过高时容易损伤葡萄藤。

图9 链条式葡萄覆土清除机
2.1.3 旋转式清土机构
河北科技师范学院的李法键[17]设计了一种葡萄园防寒土清除机,结构如图10所示。作业时,拖拉机通过三点悬挂与机具相连并牵引机具前进,输出的动力经变速箱传递至液压泵,将机械能转化为液压能驱动液压缸和液压马达工作;液压缸伸缩调节清土部件作业幅宽和作业深度,液压马达转动带动清扫叶片旋转扫除葡萄藤侧边覆土。该机具为双边作业机械,适用于水泥柱中间埋藤的葡萄园,作业速度快,效率高;清扫叶片为柔性部件,触藤时可减少葡萄藤损伤,但容易磨损变形。

图10 葡萄园防寒土清除机
陈智等[27]设计了一种葡萄藤起藤自动除土机,结构如图11所示。作业时,拖拉机通过三点悬挂与机具相连并牵引机具前进,输出的动力经变速箱传递至液压泵,将机械能转化为液压能驱动除土犁旋转,叶片侧刃旋转切下土垄侧边土并向行间抛送,刮板阻挡被除土犁抛向后方的土并将其在行间刮平。该机具结构简单,但通过整套液压系统驱动单一的旋转部件,成本较高;除土犁叶片为刚性部件,触藤时容易损伤葡萄藤;无罩壳阻挡被除土犁随意抛飞的防寒土,作业环境恶劣,且防寒土难以回到取土行间,影响后续作业。

图11 葡萄藤起藤自动除土机
宁夏农林科学院种质资源研究所的许泽华等[28]设计了一种葡萄清土机,为可摆动式扫藤装置,结构如图12所示。作业时,拖拉机通过三点悬挂与机具相连并牵引机具前进,液压缸伸缩控制扫藤装置摆动到合适的作业位置,拖拉机输出的动力经变速箱和链传动传递至扫藤装置以驱动清扫头旋转,清扫头旋转扫除土垄侧边土。清扫头的刷毛为柔性材料,可贴近葡萄藤清土,除土较为干净,且触藤时可减少葡萄藤损伤;但刷毛容易变形,磨损较快;防寒土被随意抛撒,尘土飞扬,作业环境恶劣。
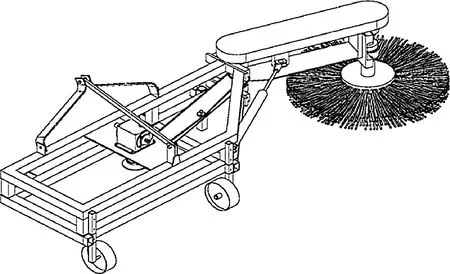
图12 葡萄清土机
中国农业大学的马帅等[29]研制了一种自动避障式葡萄藤防寒土清土机,结构与许泽华等[28]设计的葡萄清土机相似,如图13所示。该清土机采用带传动为清土刷子提供动力,其清土刷子采用刷片和橡胶板组合式结构,适应土垄不同高度土壤紧实度的变化。作业时清土刷子旋转,刷丝清除土垄中上部防寒土,橡胶板清除土垄下部防寒土,对葡萄藤的损伤小。该机具增加了自动避障功能,通过触杆感知障碍物,避障油缸伸缩带动清除刷子避让水泥柱,防止机具与水泥柱发生碰撞。
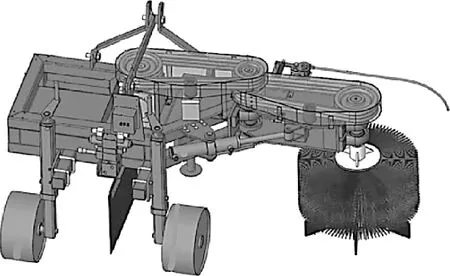
图13 自动避障式葡萄藤防寒土清除机
中国农业科学院果树研究所的王志强等[30]设计了一种前置式防寒土清除机,样机如图14所示。机具安装于拖拉机前端,拖拉机输出的动力分两路分别驱动清土搅龙和平地搅龙转动。作业时,拖拉机带动机具前进,清土搅龙转动将葡萄藤上方覆土输送至行间;当清土搅龙接近水泥柱时,避障油缸伸缩带动清土搅龙左右移动避障;平地绞龙转动将清理至行间的防寒土铺平。该机具作业速度快,但刚性搅龙叶片容易损伤葡萄藤,且清土搅龙仅清理葡萄藤上方覆土,清土量有限。
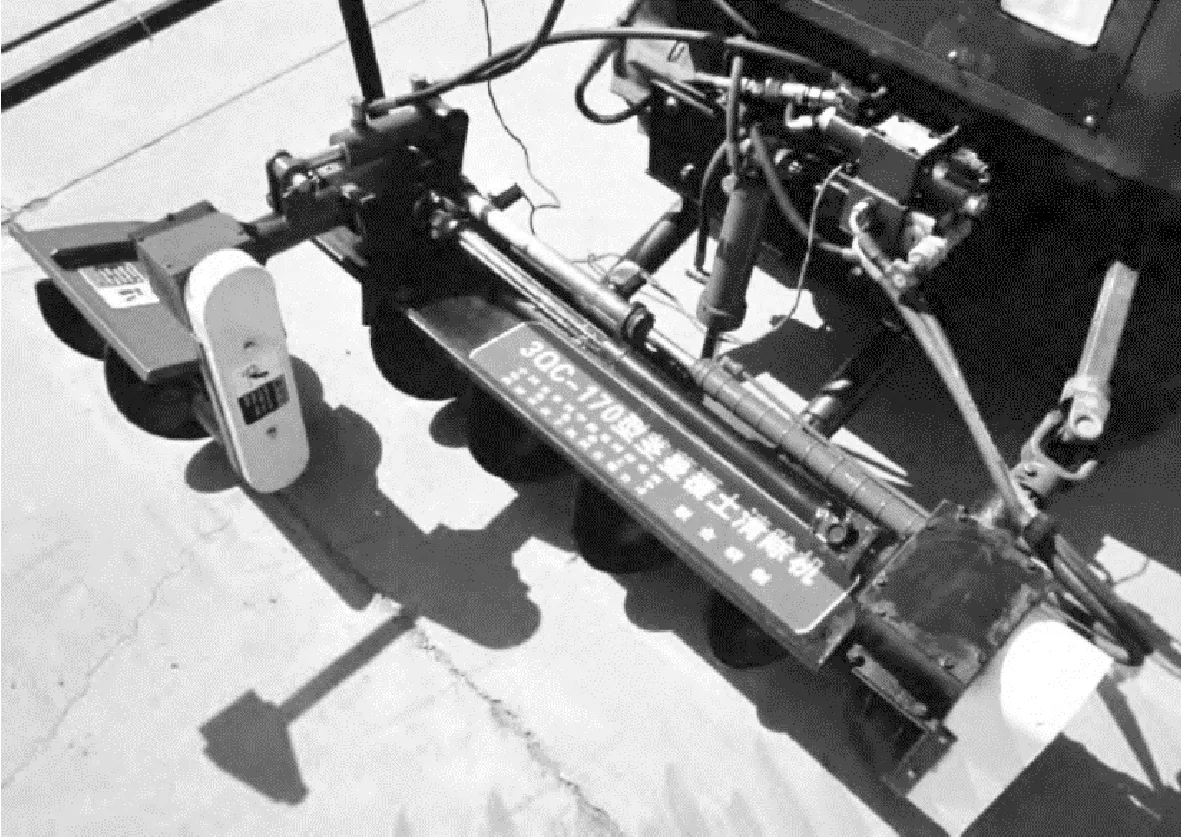
图14 前置式防寒土清除机样机
2.1.4 气吹式清土机构
江苏大学的杨启志等[31]设计了一种风力吹送式葡萄清土机,依靠风力清土,结构如图15所示。
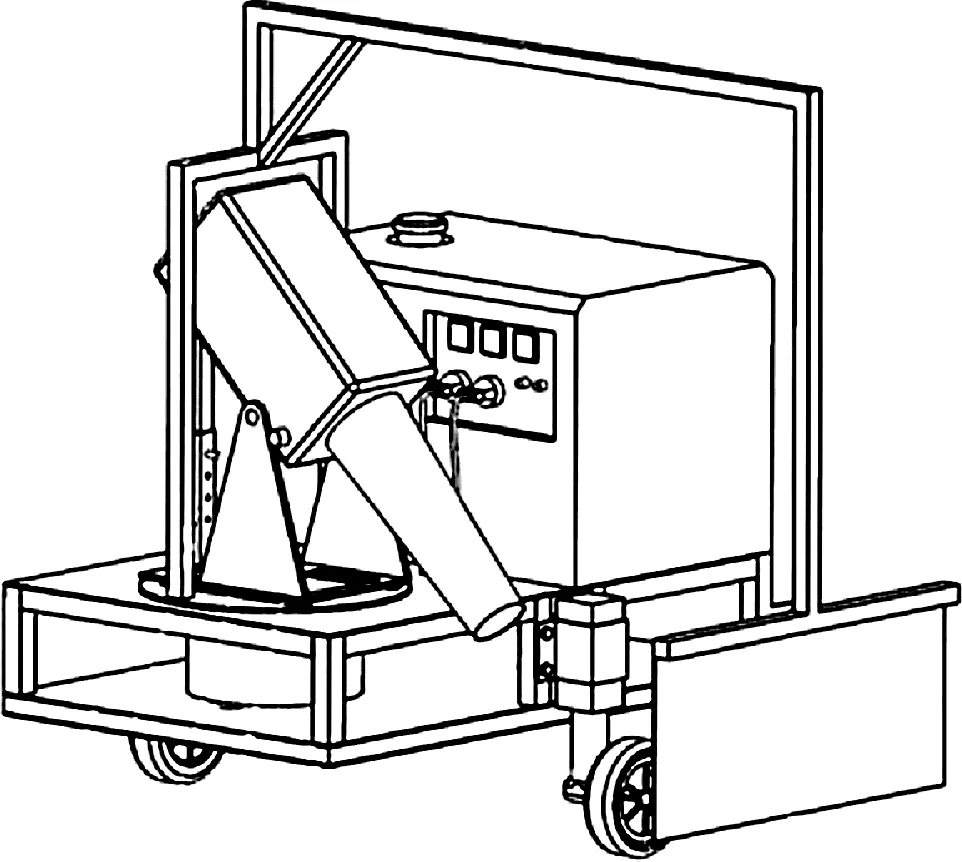
图15 风力吹送式葡萄清土机
作业时,调节风机出风口角度使其对准葡萄藤上方覆土,电机驱动风机工作产生一定压强的气流吹净覆土;挡土板阻挡被风吹向其他行间的土壤,保证防寒土被清理至取土行间。出风管和挡土板可通过水平转动平台实现180°换向,解决了单边作业机械在水泥柱一侧埋藤的葡萄园作业时存在的返程空行程问题;该清土机可实现非接触式清土,不损伤葡萄藤,但仅适用于覆土量少、沙性土质的情况,作业时尘土飞扬,环境恶劣。
2.1.5 组合式清土部件
组合式清土部件整合不同类型清土机构的优势改善作业效果,作业性能优于单一清土机构。
赵润良等[32]设计了一种葡萄清土放苗整地机,该机具在曾保宁等[24]研制的葡萄起藤机上增加了扫土装置和左右防撞装置,结构如图16所示。作业时,中部的左右扫土装置将土垄上方覆土清扫至行间,与前部的左右铲土犁配合增大了清土范围,提高了清土效率和质量;左右防撞装置接近水泥柱时报警提醒驾驶员实时调整驾驶方向,减少了拖拉机手同时兼顾两侧清土状况的精力消耗,降低了葡萄藤损伤。
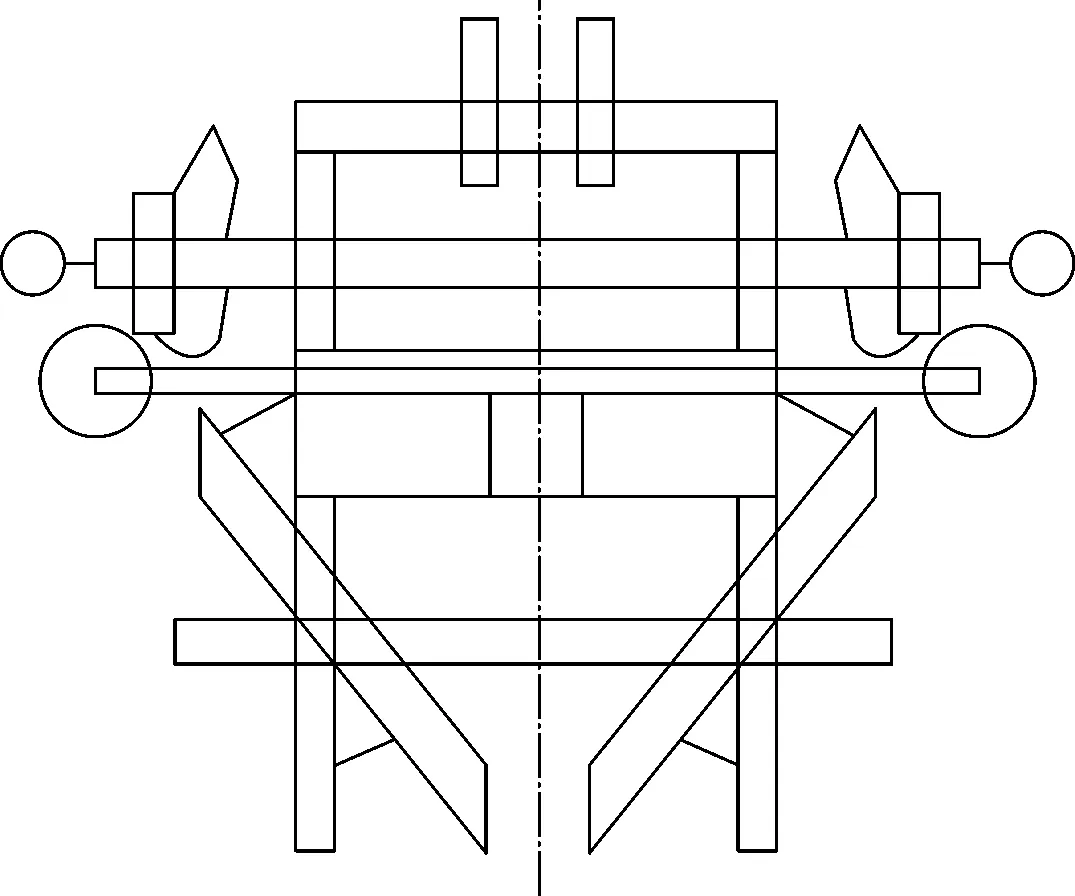
图16 葡萄清土放苗整地机
宁夏大学的周伟彬[5]在龙门拱形葡萄植保一体机的基础上设计了一种葡萄起藤机,清土部件主要包括推土板和盘刷,结构如图17所示。
(a)结构简图
该葡萄起藤机由一体机驱动前进,骑跨在土垄上进行清土作业,前端的推土板将葡萄藤上方覆土刮至两侧行间,当遇到水泥柱时,液压缸伸缩控制推土板偏转避让水泥柱,后端的盘刷旋转进一步扫除上方剩余覆土。该机具清理土垄上方土较为彻底,采用柔性材质的盘刷进行二次清土,有效减少对葡萄藤的损伤;但仅适用于水泥柱间埋藤的葡萄园,且葡萄园为了便于葡萄生长、爬架,常在藤架上布置铁丝,对机具的推广应用限制较大。
许泽华等[33]设计了一种葡萄除土清土一体机,该机具在可摆动式扫藤装置[28]上增加固定刮土装置,结构如图18所示。刮土板底刃首先刮除葡萄藤上方部分覆土,液压缸伸缩控制旋转刮土装置随时摆动位置,清扫头旋转扫除剩余覆土,二者配合增大了清土量,清土较为彻底。但该机具为单边作业机械,存在返程空行程、空跑行的问题,且清扫头将防寒土任意抛撒,尘土飞扬,作业环境恶劣。
中国农业机械化科学研究院的刘芳建等设计了一种自动避障葡萄藤扒土机,清土部件由刮土板和搅龙组成,结构如图19所示。作业时,拖拉机通过三点悬挂与机具相连并牵引机具前进,辅助油缸伸缩调节扒土部件的作业位置;刮土板将防寒土向前方推送至搅龙的清土范围内,液压马达驱动搅龙旋转将防寒土输送到行间;当避障触杆遇到水泥柱时,避障油缸伸缩带动扒土部件旋转避开水泥柱。该扒土机适用于水泥柱间埋藤的葡萄园,清土量大,作业效率高,但刮土板和搅龙叶片均为刚性部件,容易损伤葡萄藤。
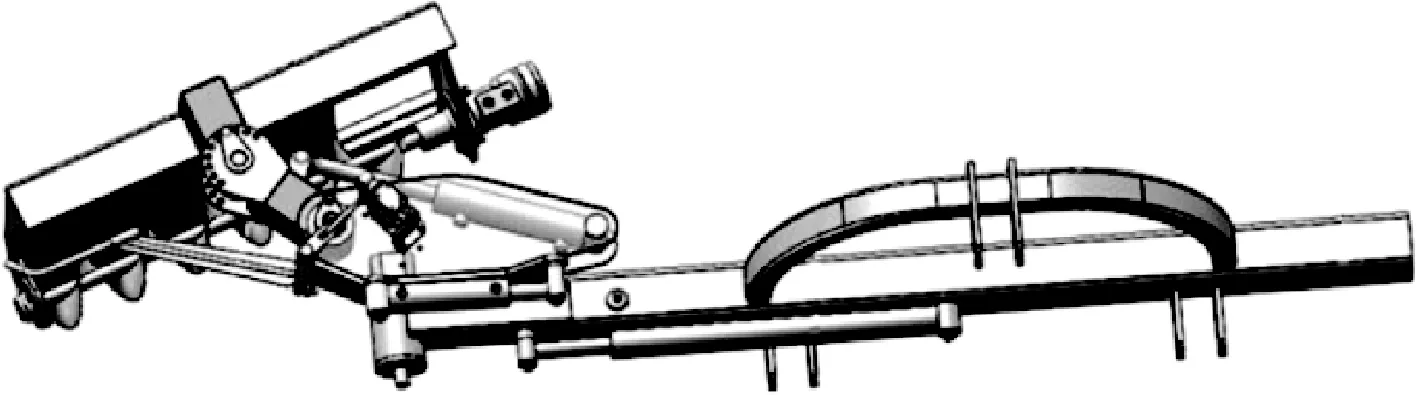
图19 自动避障葡萄扒藤机
中国农业大学的马帅等[18]研制了一种叶轮旋转式葡萄藤清土机,样机如图20所示。作业时,拖拉机通过三点悬挂与机具相连并牵引机具前进,输出的动力经齿轮箱驱动叶轮和平土搅龙旋转,刮土板与旋转叶轮配合清土,清土范围覆盖整个土垄宽度,平土搅龙旋转将清理至行间的防寒土整平。该机具清土量大,清土效率高;但该机具为单边作业机械,适用于水泥柱一侧埋藤的葡萄园,作业返程存在空行程,空跑行的问题;刮土板为刚性部件,容易损伤葡萄藤;叶轮无罩壳,防寒土被随意抛撒难以回到取土行间,影响后续作业。

图20 叶轮旋转式葡萄藤清土机
2.2 卷布机构
卷布辊作为防寒布卷收机构的关键部件,其安装方向主要包括水平式、竖直式和倾斜式。针对垄上作业机械,卷布辊位于土垄正上方,卷布辊水平安装较竖直和倾斜安装更有利于防寒布将其上方覆土持续向前推送至清土机构的清土范围内,且能够平整卷收防寒布。针对垄行作业机械,卷布辊偏离土垄上方,基本位于葡萄行间,任意一种安装方向均可满足倾斜卷收防寒布实现清土的要求,但水平安装时需要辅以防寒布换向机构才能完成卷收作业;竖直安装时,防寒布在土壤阻力作用下向卷布辊下方堆积,难以实现平整卷收;倾斜安装时不易控制卷收平整度,但可通过调整不同的倾斜角度达到较好的卷收效果。
王茂博等[34]设计了一种葡萄彩条布起膜卷膜一体机,结构如图21所示,无清土机构,利用多个竖直转辊配合完成清土和彩条布回收作业。作业时,拖拉机通过三点悬挂与机具相连并牵引机具前进,人工从田间挖出彩条布一端,并以M形穿过主起膜转辊与两个从动起膜转辊之间的空隙,向后缠绕在卷膜轴上,液压马达通过带传动驱动卷膜轴转动卷收彩条布,同时张紧的彩条布将其上方覆土倾斜拉扯到行间。该机具同时完成清土与彩条布回收作业,作业效率高,不损伤葡萄藤,但作业阻力大,对彩条布的抗拉强度要求较高;彩条布被卷膜轴卷收时受力向下方堆积,容易造成卷收不平整。
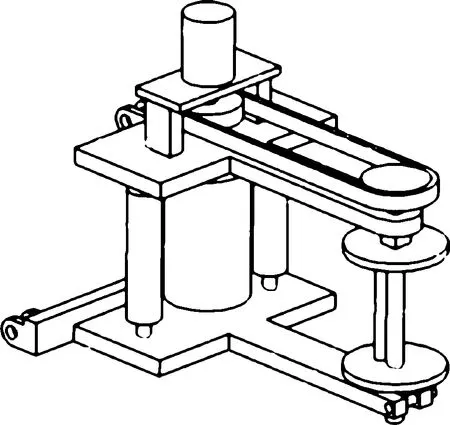
图21 葡萄彩条布卷膜起膜一体机
部分地区采用倾斜式葡萄防寒布回收机,如图22所示,液压马达驱动卷布辊转动卷收防寒布,张紧的防寒布将其上方覆土全部拉扯到行间。卷辊转速可根据行进速度和卷收情况调节,但不易卷收平整;覆土量较大时,防寒布卷收阻力过大,容易拉断防寒布。

图22 葡萄防寒布回收机
张科全与龚昌宇[35-36]设计的葡萄卷膜机均为防寒布后期处理机械,分别通过水平纵向和水平横向安装的卷膜轴将从地里揭出来的防寒布卷收起来,结构如图23所示。葡萄清土起藤作业时,首先通过人工或葡萄起布机将防寒布从土垄中拉扯出来,但不卷收,同时将其上方覆土拉扯到行间;然后利用葡萄卷膜机将防寒布卷收成布辊,便于管理存放和再利用。
(a)水平纵向卷膜轴
国外使用的地膜较厚,强度高,地膜保存较为完整,因此其残膜回收机普遍采用卷布辊回收地膜[37-38],如挂膜收膜器、绕线机、卷膜辊等。而中国使用的地膜较薄,强度低,容易破碎变为残膜,因此机具以残膜回收为主,如秋后残膜回收机和春播前残膜回收机;而苗期揭膜时,地膜保存相对完整,机具以卷收为主。卷膜辊卷收地膜的关键在于卷膜辊转速与机具行进速度的匹配,这也是影响机构卷收效果的关键因素。
2.3 其他辅助技术
2.3.1 避障技术
为了将防寒土尽可能清除干净,现有机具通常利用自动避障技术避开水泥柱,清理水泥柱间防寒土,扩大清土机构的清土范围。但防寒布辅助埋土防寒模式应用在水泥柱一侧埋藤的葡萄园,避开水泥柱清土的作业方式则不再适用,需从新的角度拓展避障技术的应用。
机械避障是利用弹簧实现避障动作,清土铲清土机构与机架铰接,通过弹簧弹力保持作业常态。白洪君[23]设计的防阻振动式清土铲的清土机构触碰水泥柱时,阻力增大,克服弹簧弹力使清土机构沿铰接点摆动开水泥柱;越过水泥柱后,在弹簧弹力作用下使清土机构恢复清土状态。机械避障简单易操作,成本低,但频繁避障会使弹簧快速失效,导致作业不稳定。
机电液联合避障是将机械、电控与液压技术相结合,实现避障作业。马帅等[29]设计的自动避障式葡萄藤防寒土清除机将避障触杆摆动时位移变化作为避障油缸动作的模拟信号,王志强等[30]设计的前置式防寒土清除机将避障触杆曲线作为避障油缸动作的模拟信号,当触杆碰到水泥柱时发生摆动,转化为控制油缸动作的电信号,接通相应换向阀,控制液压缸伸缩使清土机构避开水泥柱。机电液联合避障效果优于机械避障,不受土壤阻力影响,但避障触杆对不同葡萄园种植模式的适应性较差,需要根据作业状态设计相应的触杆曲线。
光电液联合控制自动避障是将光电子器件、电控以及液压技术相结合,使清土部件自动避让水泥柱。陈智等[25]设计的葡萄藤自动避让全向除土机将光电开关置于机架一侧前端,当遇到水泥柱时,光电开关闭合,通过时间控制器延时供电,向清土部件控制油缸的电磁阀发出收缩指令,避开水泥柱;待越开水泥柱后,时间控制器闭合,向电磁阀发出动作指令控制清土部件恢复到作业状态;根据行走速度调整时间控制器的延时时间,实现最大程度的清土。光电液联合控制自动避障技术较为智能、先进,避障动作精准灵活,但安装精度和成本较高。
2.3.2 自动调平技术
自动调平技术是机具根据作业地面坡度的变化自动调整机具的倾斜程度,从而使作业部件保持与地面平行,保证作业稳定性。李法键[17]设计的葡萄园防寒土清除机采用倾角传感器实时测量相对于地面的倾斜角度,控制系统根据倾角角度控制电磁阀实现调平油缸的伸缩,保证机器始终与地面平行,从而使清土部件实现地面仿形,达到稳定的清土效果。
4 存在问题与展望
4.1 存在问题
葡萄清土与防寒布回收机作为一种适应新式葡萄防寒模式的葡萄清土机,在葡萄清土机的基础上增加了卷布机构,二者既具有较强的关联性,又适应防寒模式而存在自身独特性。
1)从农艺角度来看,各地葡萄园规模结构、种植行距、埋土状况等各不相同,下架捆绑好的葡萄藤在防寒土垄中分布不规律,设置爬架铁丝等其他管理环节的干扰等,多种因素影响机具在葡萄园的通过性,降低了机具的适用性。
2)从机具整体来看,现有的葡萄清土与防寒布回收机均为单边作业机械,而防寒布辅助埋土防寒模式仅在水泥柱一侧埋藤的葡萄园应用,因此机具返程时存在无法作业、空跑行的问题,浪费时间和动力。双边作业机械可解决上述问题,但现有双边作业机械均为葡萄清土机,不具有卷收防寒布的功能,且作业幅宽多是人工根据种植行距调节,无法实时自动调节;双边清土机械作业时需同时兼顾两侧状况,对拖拉机手驾驶技术具有较高的要求。垄上作业式机械的清土机构与卷布机构必须协同作业才能完成葡萄清土和防寒布回收工作,限制了清土机构类型的选择,进而降低了机具对不同种植模式的葡萄园的适用性。机电液技术融合在解决机具机械发展瓶颈中的作用不明显,自动化、智能化程度有待提高。
3)从清土机构来看,清土部件多为刚性部件,清土作业中触藤时容易损伤葡萄藤;少部分为柔性清土部件,如刷丝、盘刷等,触藤时能有效减少对葡萄藤的损伤,但容易磨损变形,作业时需频繁更换;气吹式清土机构实现非接触式清土,不损伤葡萄藤,但作业速度慢,清土效率低,作业环境恶劣,不适用于大量覆土的清除;回转式清土部件作业时防寒土被随意抛撒,尘土飞扬,环境恶劣。
4)从卷布机构来看,卷布机构的转速和安置角度在现有机具中难以调整或仅可通过手动调节,影响防寒布卷收的质量。其中,卷布机构设计的关键在于卷布辊的外周线速度与机具作业前进速度的匹配,这也是卷布机构设计的难点。卷布辊直径随防寒布卷收而变大,其外周线速度逐渐增大,导致机具行进速度难以与其匹配,无法实现平稳、平整卷收防寒布。
5)从辅助技术来看,避障式清土部件仅针对水泥柱避障,清理水泥柱间覆土,在水泥柱一侧埋藤的葡萄地,避障机构无法发挥作用。
4.2 展望
1)中国北方葡萄栽培区冬季独特的气候条件导致了冬季下架埋藤与春季清土起藤两个独特的作业环节的产生,通过培养并推广真正的耐寒露地越冬葡萄新品种,消除两个作业环节,从根本上解决春季清土作业困难的问题。发展葡萄大棚、设施栽培,降低南方高湿度、多雨水等因素对葡萄生长的不利影响,充分利用南方温度、光照等优势因素,将北方优势、重心区域向南方葡萄产区转移,解除北方冬季气候因素对葡萄管理环节机械化发展的制约。规范葡萄种植模式和埋土要求,推广防寒布辅助埋土防寒模式,遏制为适应种植模式而造成的机具数量增长,加大机具研发创新程度,提高机具通用性。研发成本低、效果好、强度高的新型防寒材料代替埋土防寒,降低葡萄清土作业环节的劳动强度,减少葡萄藤损伤。
2)垄行作业式葡萄清土与防寒布回收机将成为防寒布辅助埋土防寒模式下的主流发展趋势,其清土机构和卷布机构独立工作,便于根据葡萄种植模式、土壤条件、埋土状况等选择合适的清土机构和加工材料,提高机具的适用性,减少葡萄藤损伤;同时清土机构与卷布机构可协同作业,清土机构既清理防寒土又辅助展平防布。解决机具作业返程空跑行问题可采取的措施包括:发展分动力双边作业机械,使动力仅供给作业一端,减少动力消耗;研发翻转式机械,实现清土机构的水平180°转向或水平横向移动与翻转等。
3)清土机构采用刚柔组合式清土部件,刚性部件清理外层大部分防寒土,柔性部件清理内层小部分防寒土,既减少柔性部件的磨损和变形,降低葡萄藤损伤,又可以改善清土效果;同时回转式清土部件注意增加罩壳,防止飞溅的防寒土污染环境。
4)采用PID控制技术调节卷布辊转速实时匹配机组前进速度,保证防寒布平稳整齐卷收。加强清土机构与卷布机构之间的协作性,增设防寒布展平机构和防寒布快速换辊、脱辊机构,提高作业质量,便于连续作业。
5)拓展传感器技术、电控技术和液压技术在机具避障、自动调平与幅宽自动调节中的应用,提高机具的自动化和智能化水平。不局限于通过光电传感器、超声波传感器避开水泥柱清理水泥柱间防寒土,以避开土垄中葡萄藤为目标,利用压力传感器使清土部件尽可能贴近葡萄藤而不损伤葡萄藤;利用红外线、微波等电磁波技术探测葡萄藤在土垄中的空间位置,精准控制清土部件动作轨迹,改善清土效果。