大型飞机增升装置气动机构一体化设计技术进展
2021-04-06刘沛清戴佳骅张雅璇栾博语李庆辉
刘沛清 戴佳骅 夏 慧 张雅璇 栾博语 李庆辉
(北京航空航天大学,北京 100191)
0 引言
增升装置是飞机机翼上的部分活动舵面,其完整系统还包括相应的驱动机构,运动算法及各种附面层控制设备,常规客机的增升装置布置如图1所示。增升装置设计技术作为大型飞机设计关键技术之一,其重大突破将极大地提高新一代商用客机的综合性能,在世界范围内其设计也是一个很有挑战性的研究课题[1]。

图1 常规客机增升装置构成
0.1 增升装置作用与原理
A.M.O.Smith[2]分析了多段翼流动的空气动力学现象,总结出了几大作用,包括机翼面积的增加,弯度增加,新生边界层厚度较小以及缝隙效应等。一般而言后缘增升装置(襟翼等)主要作用为提升给定迎角下的升力系数,而前缘增升装置(缝翼等)能显著提升失速迎角,二者联合使用,保证了起飞与着陆时的升力系数和失速迎角同时增加[3-4]。
从经济性考虑,P.L.Garner等人[5]指出,以波音777为例,起飞升阻比增加1%,可以增加2 800 lb的有效载荷,而最大升力系数增加1.5%,可以增加载荷6 600 lb。同时起飞升力系数增加0.1,起飞迎角可以减小一度,相应的起落架长度缩短,可减轻约1 400 lb的重量。从安全性考虑,飞机起降阶段仅约占总飞行时间的6%,但据统计该阶段事故发生率却高达68.3%,起飞后3 min和着陆前7 min,也被称为“黑色十分钟”。主要原因还是起降阶段飞行速度慢、高度低,出现突发问题可供操作余地小,同时起降阶段迎角较大,更易发生失速等意外情况。增升装置可以提升飞机的低速性能,在一定程度上避免事故的发生。
0.2 发展趋势
早期的商用飞机巡航速度处在较低水平,巡航与起飞着陆速度比值在2∶1左右,因此简单的襟翼下偏即可满足要求。但随着巡航马赫数的增加,机翼高低速性能匹配的矛盾越来越凸显。对于起飞性能,FAR25规定客机在爬升速度V2下,升力系数ClV2必须大于等于最大升力系数Clmax/1.27。此外起飞状态下要求客机能够保证一定的爬升率,根据其计算公式“爬升率=推重比-1/升阻比”,升阻比也是起飞构型优化中的一大指标。对于着陆构型,FAR25规定客机进场速度所对应的升力系数应大于等于Clmax/1.51,且要满足有限长跑到内减速的要求[6]。为此,至上世纪70年代,增升装置的类型朝着追求更佳的气动性能发展,出现了以波音747为代表的,极其复杂的三缝富勒襟翼。图2展示了近几十年以来波音和空客客机尾缘增升装置的发展趋势。
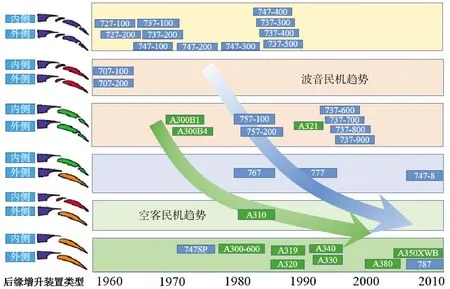
图2 波音、空客客机增升装置发展趋势
随着对流动的认知以及设计技术的提高,简单的增升装置也能够达到复杂构型近似的气动效果,但简单构型可带来结构重量的下降和机构可靠性的提升[7]。此外,环境保护意识的提高,对机场噪声也提出了要求。美国NASA[8]提出飞机外部噪声在10年内降低10EPNdB、20年内降低20EPNdB,欧盟咨询委员会(ACARE)[9]也提出了民用航空工业在2020年之前减少噪声50%的指标。增升装置的设计问题,俨然成为一个集气动、机构、结构、噪声、可靠性的多学科交叉耦合问题。
新一代波音787和A350XWB均采用了单缝襟翼,驱动机构中也去除了导轨,采用全铰链杆件连接。扰流板联合下偏技术,既通过增加弯度的方式弥补了其在起飞构型下由于富勒量太小而造成的气动性能下降,又保证了着陆构型下由于偏转轴线太靠近下翼面而导致的缝道宽度过大的问题[10-12]。徐琳[13]、王文虎[14]对扰流板联合下偏的铰链襟翼进行了数值模拟和气动分析。波音787前缘密封缝翼方案和A350XWB内侧前缘下垂的方案,都有效降低了噪声的污染。
1 外形切割设计方法
飞机设计一般以巡航状态的某设计点为主,增升装置的设计一般为其下游作业,因此首先要从干净构型上切出增升装置的外形。切割曲线需要使多段翼形成收敛缝道以提升气流动能,来抵抗后翼逆压梯度,同时外形光滑连续,避免不必要的流动现象。
飞机设计手册[15]推荐使用如图3所示的椭圆曲线来描述。其将整条曲线分为点1-点3、点3-点4、点4-点5三段,分别满足上下曲线的相切和头部外形的设计。此外,其他二次曲线或高次曲线也常用于切割曲线的设计[15-16]。

图3 襟翼椭圆切割曲线
非均匀有理B样条曲线(Non-Uniform Rational B-Splines,简称NURBS)能够表示复杂外形,其可表示为式(1):
(1)
其中,di为控制点的坐标,ωi为权重因子,Ni,k(u)为基函数,可用式(2)表示。
(2)
NURBS具有可局部调整的优势,局部曲线只受附近控制点的影响。相比于传统多项式曲线,能够实现切割曲线的局部修型,降低了优化的难度。此外,权重因子ωi的存在使曲线有更大的自由度。当ωi都为1时,NURBS曲线就退化为B样条曲线。在实际设计中,NURBS曲线能够描述出光滑连续的翼身组合体[17]和增升装置外形[18-19]。
2 起降构型优化方法
2.1 气动性能计算方法
气动性能的评估效率和精度,直接影响优化的结果。早期的气动计算主要基于无粘假设的势流理论,包括面元法、涡格法等,其在描述多段翼流动时比较吃力。随着计算技术的发展,计算流体力学(CFD)方法的大规模应用成为了可能。对于计算宏观物理量,RANS方法能以可承受的计算代价给出令人信服的结果。在中国大型客机气动设计中也大量应用了CFD,计算共耗时大于4 000万CPU小时[20]。
采用CFD的方式进行优化,就不得不考虑网格自适应问题。常见的包括网格变形[21-22]、重叠网格[23-24]、网格录制[25]。对于复杂外形,整体网格变形的时间消耗相对较大,一般对局部网格进行重构。重叠网格本身不涉及网格问题,但运动后重叠区域的挖洞需要额外的计算资源,边界的插值精度也是需要考虑的问题。网格录制在保证拓扑结构不变的前提下,将块重新对应几何面。这种方法能够生成标准的结构网格,且计算时间快,但前期的录制程序编制周期较长,也需要准备一些运行失败的措施。整体而言,如何提高网格自适应的鲁棒性是最大的难点,自动生成的网格需要满足CFD计算的各项质量要求,此外还需要提高计算的效率。
2.2 优化算法
增升装置的起降构型优化问题,是典型的非确定性多项式问题(Non-deterministic Polynomial,简称NP)。该类问题的一个明显特点是:给定一组输入参数能够容易地求出对应的输出,但想要获得最优输出所对应的输入是十分艰难的,很难通过数学模型或理论推导求得最优解。常用的解决方法主要可分为梯度法和启发式算法。
梯度法,通过在初始点附近试探,计算目标值函数对于每个变量的梯度来确定移动方向。常用的有梯度下降法[26]、伴随方法[27]等。该类方法不具有全局搜索性,对于初始构型的要求较高,但收敛速度较快。
启发式算法,通过在环境中的试错,在有限的时间内找到合适的解,该方法寻找最优解的近似解。该类方法已大规模应用于增升装置的优化中,如粒子群算法[28]、禁忌搜索算法[29]、遗传算法[30-33]等,均取得了较好的结果,其也被大量应用于中国大型客机的高升力构型设计。启发式算法虽然原理简单,且具有全局搜索性,但也存在着收敛速度慢,可能跌入局部最优解的困境等难点。
代理模型和降阶处理本身只起拟合回归的作用,但能与其他优化算法结合,降低计算量。在增升装置的优化中常用的包括Kriging[31,34]、响应面[35]等,是提升优化算法效率的助推剂。
限于CFD的计算量,目前的研究集中于二维翼型的优化,少有三维整机的优化。但研究显示二维的流动与三维的流动存在明显差别,误差来源包括且不限于展向流动[36-37]、三维机翼扭转角尖削比、机翼和机身的干扰[7]等。尤其在襟翼大偏角或大迎角情况下对分离区的预测,二、三维计算方法存在明显区别。有研究显示二维优化结果直接应用于三维设计,只有三维最优解的一半左右。目前的三维设计方法,有基于升力面的理论推导[38]和2.5D优化[34,39]等,尚无在优化算法层面的解决方法。
3 机构设计方法
增升装置的形式朝着简单的方向发展,但各学科间的耦合关系却越来越紧密,尤其是机构的约束,直接决定了气动位置是否可以到达。因此本章对机构求解方法进行简单介绍。
3.1 机构自由度判断
在机构设计前先进行自由度的计算,判断机构可实现性,能够避免无效计算量。常见的增升装置均为细长体,展向尺寸远大于弦向尺寸,因此一般沿展向布置2至3套机构来实现运动。在机构自由度计算中,并联机构的计算是一大难点,主要原因是柱铰方向可能存在虚约束。以图4的简单铰链襟翼机构为例,其采用并联RSSR-RSSR机构驱动,如果按照常规机构自由度计算,如式(3),其自由度为负值(最后减2为球铰杆件的局部自由度)。

图4 简单铰链襟翼RSSR-RSSR机构
F=5×6-4×5-4×3-2=-4
(3)
实际中支撑部分的柱铰方向必须相同,襟翼才能按照定轴旋转的轨迹运动,因此内外侧有一个柱铰为虚约束,释放后整体自由度为1,有确定运动方式。
在更为复杂的机构设计中,虚约束可能无法直观看出,因此传统的这种计算方式存在应用的局限性。黄真[40]教授提出一种旋量的方式计算自由度,更适合在增升装置机构设计前进行应用。
3.2 运动过程描述
根据夏莱定理[41],刚体的运动可分解为定轴旋转和沿轴向位移。对于大多数增升装置来说,其运动轨迹属于定轴旋转,在已知旋转参数的情况下可以用有限螺旋矩阵来描述起降位置:
(4)
其中,[Rφ]u为定轴旋转坐标变换矩阵,如式(5)所示,ux、uy、uz为该轴的方向,φ为转角,Vφ=1-cosφ。
部分增升装置的运动轨迹较为复杂(如富勒襟翼),计算前也未知螺旋参数,可用数值位移矩阵描述:
(6)
其中,A、B、C、D为不共面的四点,下标2为起降位置,下标1为巡航位置。
3.3 机构求解
通过位移矩阵可描述增升装置的巡航、起降位置,一般可将整套机构分为驱动部分与支撑部分分别求解。通过机构杆长在运动过程不改变长度的约束,建立求解方程,运用牛顿迭代法等可较容易地进行求解。
针对大型飞机普遍采用的各式增升装置,已有较多研究阐述了其机构原理和设计方法。在求解前缘增升装置机构方面,王一帆[42]、周志杰[43]分别对前缘下垂和前缘缝翼机构进行了设计,在后缘襟翼机构求解方面,李豆豆[44]求解了富勒襟翼并联RSSP机构,唐家驹[45]、孔垂欢[46]针对波音787所采用的空间并联RSSR机构进行求解,陈亚璨[47]对铰链襟翼空间机构进行了详细阐述,包括A350XWB采用的空间RRSSSS-RRRRRS机构,其中还提出了解决宽体客机襟翼过长的三支撑设计方案。
4 气动/机构一体化设计方法
传统的增升装置设计遵循先气动后机构的串行设计流程,常采用极其复杂的机构形式去满足不同的气动卡位。然而对于越来越简单的增升装置构型,机构所能达到的卡位有限,对气动设计提出了更多约束,因此气动/机构一体化的并行设计流程是需要研究的方向。
国外的Yip L.P.[48]与Potter R.C.等[49]人在进行增升装置气动位置设计时,提出重量、成本等其他学科优化目标。Reckzeh D、Strüber H在参与包括A400M[50]、A380和A350XWB[51]等飞机的增升装置设计基础上,总结了空客公司在该领域所做的工作,提出气动机构一体设计的思想。van Dam C P等人[3]对四套机构导引下的2D三段翼进行了优化,在气动设计中加入了机构的约束。面向设计人员,给出不同气动需求下推荐的机构,建立起拟合的气动数据库,以便进行快速设计。
国内也对在机构约束下的气动优化方法开展了大量研究,包括单富勒襟翼优化[52]、前缘下垂和富勒襟翼[53]、前缘下垂和铰链襟翼[55]、前缘密封缝翼和铰链襟翼[56]的各种组合方式。北航陆士嘉实验室团队结合增升装置气动/机构一体化设计思想和实际工程需求,开发了一套设计平台[57-58]。为适应新一代宽体客机增升装置的发展趋势,进一步开发了该平台的改进版[59]。新软件更注重设计通用性和鲁棒性,以支持更多类似大型飞机增升装置设计。
目前国内外对增升装置气动机构一体化优化的研究,限于计算资源主要集中于二维多段翼型,以采用机构参数作为优化变量的方法为主。对于带机构的全机三维优化的研究较少。而二维机构气动一体优化的结果如何进行三维设计,是研究的一大空白。随着材料学和控制学等学科的发展,采用柔性材料替代传统的刚性增升装置成为发展的趋势,国内外提出了较多的实现方案,包括多段铰链式[60-61]、连杆式[62-63]、钢索式[64]等。柔性增升装置设计中,气动与机构的耦合无一例外地将更加紧密,带来了更大的挑战。
5 结论
目前由于结构重量、可靠性、环保等多方面的因素,增升装置的设计问题逐渐由单一的气动设计问题演变为多学科交叉耦合的复杂问题,设计难度逐渐提升。其中如何解决增升装置在机构约束下达到最优气动位置是主要难点。本文基于气动/机构一体化设计的必要性,分别介绍了,从干净构型切割出巡航构型的外形设计方法,优化循环中气动评估方法和优化算法,起降构型中的机构设计方法。本文总结了目前气动/机构一体化设计方法的研究进展,为中国未来大型客机的先进增升装置设计提供技术途径。
