可调度和不可调度分布式电源机组选址优化
2021-04-01顾杨青
管 笠,何 平,白 锐,顾杨青
(国网江苏省电力有限公司苏州供电分公司,江苏 苏州 215000)
0 引言
分布式电源如果在网络中的布局合理,可以降低电网成本、改善电网电压和减小网损等,同时实现清洁环保的电力供应[1]。其中,分布式电源的选址定容问题应当在满足经济性和运行约束下优化机组的布点和容量,使得效益最大化[2]。
目前,针对分布式电源(DG)的选址定容优化研究较多。文献[3]提出利用电压灵敏度指标,以减小网损和提高电压稳定性为目标的分布式电源规划方案;文献[4]以网损最小和投资成本最低进行DG选址定容规划;文献[5]提出利用最优潮流的进化算法对这些分布式电源进行选址;文献[6]考虑分布式电源时序特性和多场景提出了选址定容模型;文献[7]在分布式电源选址定容时也考虑了负荷和分布式电源出力的时序波动性;文献[8]还考虑了风速、光照和负荷之间的相关性,建立了相应的选址定容模型。这些研究都未从分布式电源可调度和不可调度的角度出发进行分析。因此,本文针对可调度和不可调度分布式电源机组进行选址定容优化,建立了多目标的分布式电源机组选址定容优化模型。
1 可调度机组和不可调度机组
分布式电源涵盖的种类较多,风机和太阳能电池板发电出力为非连续的,即波动性较大,本文称其为不可调度机组;其他的分布式电源,包括生物质能发电、微汽轮机发电、热电联产机组和燃料电池等,较易人为控制,称为可调度机组。本文假设所有DG机组均可注入有功和无功,且功率因数为0.85。如果机组不能注入无功,如太阳能电池板,则假设其连接无功电源,向系统注入无功。
2 DG选址定容优化模型
2.1 目标函数
本文考虑多目标函数,如下所述。
2.1.1 有功网损最小
本文有功网损采用支路电流和支路阻抗来计算,具体为
(1)
NL为支路数;Rk为支路k的电阻。
2.1.2 电量网损最小
电量网损根据典型日的功率损耗计算,具体为
(2)
2.1.3 DG装机成本
装机成本按下列公式计算:
minf3=CDG
(3)
(4)
(5)
(6)
c1为投资成本;c2为可变成本;c3为运维成本;PDGi为节点i的DG装机容量;γ为负荷因数;d为贴现率;T为规划期;NDG为DG数;r为通胀率;βt为现值系数。
2.1.4 电压稳定性
电压稳定性由以下公式确定。
maxf4=VSImin
(7)
VSImin为电压不稳定指数的最小值。该指标是反映系统稳定性的指标之一。辐射状网络结构如图1所示,对于辐射状网络,其计算公式为[9]
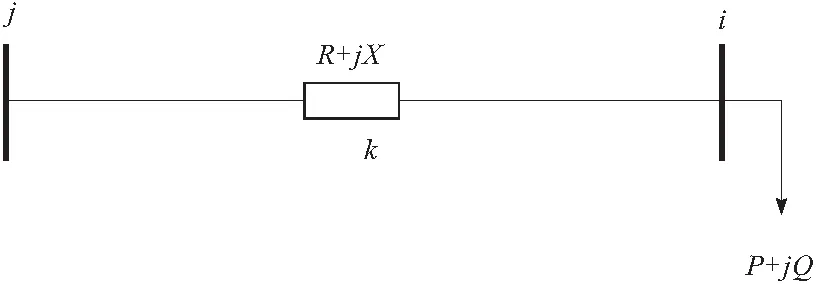
图1 辐射状网络示意
(8)
Vj为节点j的电压;Pi为节点i有功;Qi为节点i无功;Rk为支路k电阻;Xk为支路k电感。
VSI值越小,节点对电压变化的灵敏度更高。因此,VSI越接近1,该节点越稳定。
2.1.5 功率稳定指标
功率稳定指标(power stability index,PSI)为线电压的稳定指标,计算式为
(9)
Rk为支路k电阻;PL为支路受端负荷功率;PG为支路受端发电功率;Vi为受端节点电压;θ为支路阻抗角;δ为功率角。
对于线电压稳定性指标,稳态时应当小于1,越接近0系统越稳定。
2.2 约束条件
本文的约束条件包括功率潮流约束、节点电压约束、DG机组出力约束和支路电流约束。
2.2.1 功率潮流约束
功率潮流约束为:
(10)
(11)
NN为节点数;Pg和Qg分别为松弛节点有功注入和无功注入;PDG和QDG分别为DG的有功和无功出力;PD和QD分别为负荷的有功和无功需求;PLoss和QLoss为网损的有功和无功分量。
2.2.2 节点电压约束
节点电压约束为
Vimin≤Vi≤Vimax
(12)
Vimin为节点i电压最低值;Vimax为节点i电压最大值;Vi为节点i电压。
2.2.3 DG有功出力约束
DG有功出力约束为
PDGimin≤PDGi≤PDGimax
(13)
PDGimin为节点i的DG出力最小值;PDGimax为节点i的DG有功出力最大值;PDGi为节点i的DG有功出力。
2.2.4 支路电流约束
支路电流约束为
Ik,l≤Ik,th
(14)
Ik,l为支路k的电流;Ik,th为支路k的热极限。
3 选址定容分阶段求解算法
3.1 生物地理学算法
生物地理学优化(biogeography-based optimization,BBO)算法是一种寻优算法[10]。该算法受生物地理学原理启发,即大自然通过物种在地理区域间迁移和漂流,最终达到一种平衡态,即为最优结果。该算法基于“岛屿生物地理学理论”[11],岛屿对生物的友好程度可以用指标衡量,岛屿中生物的迁入率越低,岛屿环境越恶劣。这些因素称为适宜指标变量(SIV),代表BBO中z维的自变量。随着这些因素的改变,相应岛屿的适宜指标(ISI)也随之改变,因此ISI代表BBO中的因变量。基于此,N个岛屿的z维模型为
ISIp=fp(SIVp1,SIVp2,…,SIVpz)p=1,…,N
(15)
在对BBO编码之前,还要利用一些重要等式,即:
(16)
(17)
μp和λp分别为迁入和迁出率;p为种群。
另外,用如下种群概率用来计算变异率mp。

(18)
其中,特征向量v计算式为:
(19)
vw=
(20)
(21)
算法主要的步骤如下:
a.迁移。迁移过程中,个体可由优良岛屿的种群迁移到较差岛屿的过程得到优化。
b.变异。在岛屿面临着随机的、不可控的和不可预测的因素中,一些因素可以使其发生变异。利用种群数概率Pp,变异率mp计算式为
(22)
c.精英选择。利用轮盘赌原理进行精英选择。
d.重复清除。通过避免p岛屿的特征在N-1的岛屿中重复,可以增加现有种群的多样性。
3.2 模糊决策
与单目标函数优化不同的是,多目标优化存在Pareto最优问题,即存在不同维度的多个最优值。本文利用模糊决策来求解最优值。每个目标函数对应的线性函数μi为
(23)
min(Fi)和max(Fi)分别为第i个目标函数最小值和最大值。
通过模糊决策得到最优解为
(24)
nob为最小化目标函数个数;k为Pareto最优解的数量。
本文利用BBO算法,结合模糊决策对本文模型进行求解。
4 算例分析
4.1 系统说明
本文选取IEEE69节点系统进行仿真分析,仿真环境为MATLAB 2012b,接线图如图2所示。系统数据见文献[6]。

图2 69节点系统
本文假设非可调度机组的负荷因数固定为1,可调度机组的负荷因数为0.75,规划期为15年,规划期内的负荷为固定值;算法种群数为120,BBO中最大变异率mmax为0.1,种群数概率Rm为50%;假设不可调度机组风机和光伏各3台,其余可调度机组各1台。
4.2 算例分析
4.2.1 选址定容结果
根据本文的模型和假设,利用BBO算法进行模型求解,得到结果如表1所示。

表1 选址定容求解结果
从表1可以看出DG在各个节点的位置、容量和装机维护成本。在DG机组对网损削减的贡献占比来看,热电联产机组和太阳能机组分别为16%和20%,效果相比风机等更优。在成本方面,生物质能的最高,微汽轮机和热电联产机组都处于较低的水平。在容量配置方面,可以根据微网的需求进行相应的配置。
4.2.2 可调度机组和不可调度机组对比
本文对比分析可调度机组和不可调度机组在网损削减、节点电压稳定性方面的异同。将所有可调度机组按一类考虑,不可调度机组按另一类考虑,不再细分具体的机组类型。得到一天内的网损曲线和VSImin曲线分别如图3和图4所示。
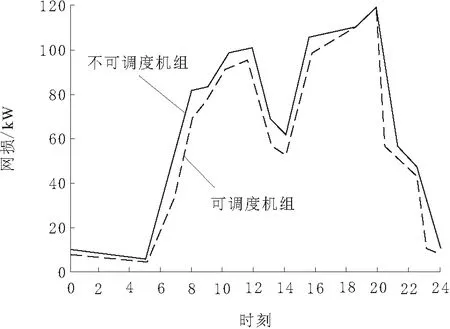
图3 可调度机组和不可调度机组的网损情况

图4 可调度机组和不可调度机组的VSImin值
可以看出,可调度机组在网损方面,带来的损耗更小,这主要是由于可调度机组波动性小,出力大部分可控;并且可调度机组的VSImin也比非可调度机组的对应值要高,说明可调度机组在保持系统稳定性方面表现更加优越。
5 结束语
本文对可调度和不可调度分布式电源机组进行选址定容优化。根据机组的可调度和不可调度特性建立了多目标优化模型,并利用BBO算法进行求解。在IEEE69节点系统中的求解结果表明,可调度机组在网损削减和维持电压稳定方面比不可调度机组表现要好,这主要是由于不可调度机组出力的不确定性和波动性造成的。同时说明了本文的生物地理学算法和模糊决策对于多目标问题求解能力较强。