小口径防空火炮内膛往复振动式气动擦拭机器人设计
2021-04-01周仁斌倪纯华
周仁斌,倪纯华
(1.武昌首义学院机电与自动化学院,湖北 武汉 430068;2.武汉华锐融创机械有限公司,湖北 武汉 430068)
0 引言
防空火炮在射击前、后以及火炮的启封和封存,均要对火炮进行擦试保养。防空火炮内膛擦拭,是指对炮管内膛进行清洁的工艺,主要是为了去掉火炮射击后留下的残留物,保证火炮正常使用[1]。由于火炮种类各异口径大小不同,身管内膛状况不同,使用环境各异。对炮膛擦拭控制方式,有电机驱动、液压驱动和气动驱动等方式。目前,国外火炮身管擦拭系统比较典型的有Airesco公司研制的气动擦拭系统,GI Industries公司研制的电动擦拭系统,米尔弗姆公司设计的清洗枪、炮管擦拭设备等[2]。国外采用的Milfoam清洗系统擦炮装置[3],适用于口径76~155 mm。在国内大、中口径火炮擦拭方面,文献[4-5]以150~250 mm火炮为应用环境,研究和设计一种便携式高效线膛炮炮管擦洗机器人,并对机械部分进行了设计分析。在电机驱动控制方面,赵京鹤[6]采用电器元件自动控制清洁杆直线运动与清洗头回转运动,合成了自动清洗炮管内膛样机;庞金录等[7]对多功能便携式火炮身管内膛擦拭机进行了结构设计,主要适用于中大口径火炮身管擦拭保养。从最新的专利网检索中,文献[8-12]等驱动模块均由1个或多个电机或步进电机驱动,行动机械及传动结构均较复杂,并且步进动作配合协同性要求较高。在火炮内膛擦拭的气动控制驱动方面,文献[13]提供了一种多功能自动擦炮机,其特征包括气缸和设置于气缸两侧的气动卡盘和擦拭盘,在气缸后端固定有带支撑的气动卡盘,气缸和气动卡盘通过阀门与气源相通,通过手动切换气动卡盘及气缸进排气口实现,也可通过PLC控制器等实现,可实现定点擦拭。
综合可以看出,国内外学者对火炮内膛擦拭装置作了很多研究,但大都限于对中、大口径身管火炮的内膛擦拭。而小口径防空火炮炮膛擦拭,主要由多名人员进行人工擦洗,劳动强度大,擦拭效率低,不能保证火炮在连续射击中的可靠性。针对这些问题,结合前期预研项目研究,拟进行小口径防空火炮往复振动式气动擦拭机器人的机构优化设计与关键技术研究,适用于小口径火炮内膛平时及战时擦拭保养需求,提高军事效益。
1 往复振动式气动擦拭机器人的整体方案优化
1.1 需求分析与设计思路
通过对已有大口径管道机器人的运动方式和清洗炮管的特点进行分析,结合小口径炮管对机器人擦拭的需求情况,容易得出,较好的适应性和有效的清洗方式是擦拭机器人在炮管内应当具有的性能[14]。设计并优化炮管擦拭机器人的结构,达到对火炮内壁预期的清洁效果,应当符合以下要求:
一是结构紧凑,便于携带,使用符合要求;二是需要适应性强,炮管能进行一定直径范围的操作;三是需要快速的清洁速度,效果好,并能实现快速响应要求;四是需要很强的互换性,主要部分易于拆卸和互换,可以使用模块设计;五是延展性强,能够携带测试和维护设备,便于机器人的维修。
1.2 整体设计方案的确定
针对小口径来复线防空火炮内膛擦试保养的需求,采用气动擦拭方式,因为气动方式结构简单、工作轻便安全、可靠性高、使用寿命长。故可构建 “通用气源+滑块式气动振动器+型号毛刷”的配置架构,在通用空压机供气下,通过更换不同直径毛刷满足对30 mm、35 mm和37 mm系列小口径来复线炮膛的擦试保养。以37 mm防空火炮内膛气动擦拭为例,37 mm往复振动式气动擦拭机器人的主机结构设计如图1所示,由滑块式气动振动器(3种型号一致)、37 mm擦拭毛刷和进气附件等组成,主机可实现自动擦拭与自动喷液2种功能。

图1 擦拭机器人主机的三维模型
2 往复振动式气动擦拭机器人主机的结构设计
往复振动式气动擦拭清洗机器人包括通用空压机气源及气动控制元件(如油水分离器等)、进气管道和擦拭主机,依次连接形成一套完整的擦拭机器人。往复振动式气动擦拭机器人主机整体结构设计如图2所示。
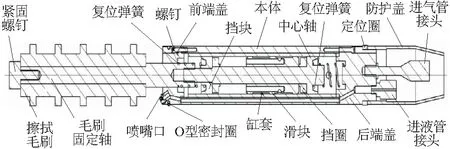
图2 擦拭机器人主机结构示意
擦拭主机气动擦拭功能组件,包括主机本体和擦拭毛刷。擦拭主机包括主机本体及与本体相连的前、后端盖;位于本体内的缸套;位于缸套内的滑块及中心轴;与中心轴连接的前后挡块;前端盖与前挡块、后端盖与后挡块之间设计有复位弹簧;滑块与前、后挡块之间设计有缓冲挡圈等。
擦拭主机液体喷射功能组件,包括主机本体上的通孔液道、前端盖上的喷嘴口及后端盖上的进液管接头。
2.1 滑块式气动振动器的设计
滑块式气动振动器的结构及相互之间的位置关系如图3所示。主机本体上加工有进气道,与后端盖内气道及进气管接头相通;套装在中心轴上的滑块呈圆柱体状,外圆表面加工有前后2部分进气环槽,滑块内部间隔90°,加工有与前后进气环槽相通的前后气道。缸套与滑块间、滑块与中心轴之间,均是相当精密的配合,一般有0.03~0.01 mm的配合间隙,无需密封环,能确保给机构一个良好的密封性能。由于弹性效应的存在,会使其紧紧地贴在气缸内壁上,而这种紧密的配合作用,使得滑块、缸体与中心轴之间建立了相对可靠的动态密封。
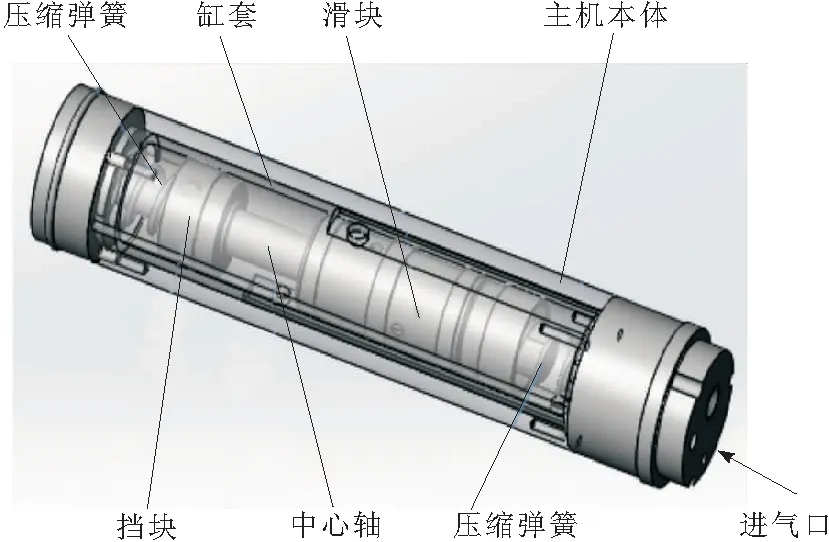
图3 滑块式气动振动器设计
在振动器中,缸套内表面、套装在中心轴上的滑块及前、后挡块,将内部空腔分为前腔和后腔2个封闭空间。往复振动式气动擦拭机器人主机工作时,高压空气通过外置气源及控制元件持续地进入进气管接头,通过主机后端盖内气道及本体上内气道,经过缸套上专用气孔,进入滑块环槽,再通过与滑块环槽相通的内气道进入前腔或后腔,推动滑块在中心轴上往复轴向移动,从而不断地冲击与中心轴固定在一起的前后挡块及挡圈,通过中心轴带动毛刷固定轴,从而带动毛刷高速往复轴向移动,得到持续性振动擦拭动力。擦拭机器人在气动擦拭时,给它一个适宜的初速度,就可以实现其方向的控制。由于擦拭毛刷和导向毛刷呈螺旋状排列设计,滑块式气动振动器作高速往复振动时,使擦拭毛刷沿着来复线内膛螺旋式间歇性前进,由于顺向擦拭时刷毛倒向振动阻力小于逆向擦拭时刷毛倒向振动阻力,可实现往复擦拭的同时,沿炮膛自主纵向运动。
本体的加工材料是铝合金2A12,强度较高,但缺点是它的抗蚀性不高,故本体结构需要进行红色阳极氧化的表面处理,来提高抗腐蚀能力。
缸套是一个重要的部件,其表面加工有进、排气孔,与本体结构内气道相配合,作为高压气体的流通气道;缸套的前后端面及内外圆表面的表面粗糙度加工要求很高,因为这关乎到滑块在其内部的运动工况,缸套内外圆表面的同轴度要求偏差为0.01 mm。缸套的加工材料为合金工具钢,韧性强,性能较好。加工前要经过热处理,整体调质HB260-280,内圆表面等离子渗氮淬火HRC60-65,可以提高缸套的强度和综合机械性能,对擦拭设备的运行意义重大。
滑块中心孔与中心轴配合,外圆表面设计有一定长度的前后圆环槽,与滑块内2对盲孔分别连接,用作气体的流道。活塞的加工材料是40Cr钢,经过调质HB265-280的热处理后,会使活塞具有比较好的综合性能,提高活塞的硬度和耐久性能等。
复位弹簧包含2个,当滑块式气动振动器处于非工作状态时进行复位,便于启动时活塞处于中间位置,无启动气室死点产生;滑块与前、后挡块间的缓冲挡圈起工作时碰撞缓冲及降噪作用。
2.2 擦拭毛刷的设计
该气动擦拭机器人的擦拭毛刷,其外径大于防空火炮内膛管道直径,擦拭毛刷从炮膛管道入口推入,刷毛形变,倒向管道入口,擦拭或导向毛刷通过刷毛形变应力作用于管道内壁,毛刷与滑块式气动振动器通过毛刷固定轴及中心轴固定。考虑到擦拭毛刷在擦拭过程中容易损坏,且该擦拭机器人可应用于3种不同小口径的火炮炮管清洗,擦拭毛刷可以设计成不同口径的单个式或组合式。单个式擦拭毛刷外径大于内膛直径0.50~1.00 mm,毛刷外包擦拭布,以清洁为主,驱动为辅;组合式擦拭毛刷在前,运动导向毛刷在后,导向毛刷外径大于内膛直径1.00~1.50 mm,驱动为主,清洁为辅;擦拭毛刷比导向毛刷轴向长1.5倍左右,外径大于内膛直径0.50~1.00 mm,毛刷外包擦拭布,以清洁为主,驱动为辅。
3 关重件的运动仿真及有限元分析
有限元法是运用类似于数学模型的办法,把确切的物理系统分散为互相关联的小区域,对每一个模块设立一个通俗的近似解,再就是采用一定的函数关系,推算出满足整体模块的条件,最终求出问题的近似解。有限元法作为一种数值层面的计算办法,目前有着很广阔的实际应用价值,已经成为工程数值分析的有效办法,能适用于材料力学结构和连续体问题,通过计算机模拟分析,分步实施方案解决强度等问题,可以使产品的可靠性大大提高。滑块是气动振动器的重要零部件之一,其设计质量直接影响擦拭主机的使用寿命。下面运用SolidWorks软件的仿真插件,来进行滑块的运动仿真及有限元分析。
3.1 滑块的受力分析
对滑块动力学问题分析较复杂,选取滑块的最大压力工况,将其转化为静力学问题来解决。套装于中心轴上的滑块受到高压空气气体作用力,滑块的左右往复移动惯性力、中心轴的摩擦阻力,以及前、后挡块和挡圈的反作用力等,垂直方向滑块重力与中心轴支持力平衡,简化其他力作用,并将受力近似于水平方向,滑块的受力如图4所示。

图4 滑块受力分析模型
a.高压空气气体作用力。高压空气通过外置气源及控制元件持续地进入进气管接头,通过主机后端盖内气道及本体上气道,经过缸套上气孔,进入滑块环槽,再通过滑块内气道进入前腔或后腔,作用于滑块的端面,总压力F可表示为
F=pπ(D2-d2)/4
(1)
D为缸套内径;d为中心轴外径。
b.滑块的惯性力。由于滑块在高压气体作用下,以一定加速度a作往复变速直线运动,所以滑块的惯性力可表示为
F1=Ma
(2)
M为滑块质量;a为惯性加速度。
c.中心轴对滑块的摩擦阻力为
f=μM
(3)
M为滑块质量;μ为滑动摩擦系数。
d.前、后挡块及挡圈的反作用力为
F2=F-F1-f
(4)
根据设计,工作气源最高压强p为0.90 MPa,压力F=pS,滑块受到的理论最大压力使用SolidWorks软件来做有限元分析。可以得到:
S=π(222-102)/4=301.44 mm2
F=pS=0.9×106×301.44×10-6=271.30 N
3.2 滑块的三维建模与有限元分析
首先建立滑块的三维模型,设置约束条件并添加载荷后,生成网格,软件会根据零件的尺寸自动计算网格的参数。通过仿真运行后,得到仿真结果图,其中包括等效应力图解、应变图解。运行结果中的等效应力云图和应变云图分别如图5和图6所示。

图5 滑块等效应力云图

图6 滑块应变云图
由图5和图6可知,滑块受到的最大应力为2.96 MPa,其加工材料是合金钢,合金钢屈服强度是620 MPa,按理想最大压力计算,仿真出来的最大应力结果远小于其屈服强度,所以该气动擦拭机器人结构是偏于安全的,该结构符合擦拭的设计要求。
4 样机测试与结果分析
考虑小口径防空火炮的完整擦拭工艺需求,除擦拭主机外,对小口径防空火炮内膛往复振动式气动擦拭机器人,还可设计配套的涂油主机、涂脂主机和除铜剂注入主机,完成防空火炮的清洁擦拭、涂油、启封和封存的保管保养。气动擦拭机器人样机如图7所示。

图7 气动擦拭机器人样机
样机实验如图8所示。其中,测试条件为:实验电源为220 VAC/50 Hz,功率为2 kW,外置通用空气压缩机气源排气量为0.29 m3/min,气源最大压力为0.90 MPa。37 mm防空火炮实装炮管用模拟支架固定,炮口加装辅助牵引器,便于气动擦拭机器人主机进出炮管内进行擦拭。

图8 样机进行擦拭实验
4.1 滑块外径大小分析
滑块所受作用力的大小主要是取决于它的两侧有效圆周面大小,而已知负荷力,就可求得滑块的输出推力。根据外载荷理论,在大多数情况下,设备需要空压机来平衡工况,并依据不同的转速来选择对应的载荷率,让空压机的输出力有一定的余量,而缸套的直径过大或者过小,都会对机器人的运动造成不利的影响,造成气动能源的浪费。
根据式(1)可以看出,本次设计是针对于小口径火炮炮管的内膛擦拭,根据各种实际情况的考虑及清洗效果,工作气源最高压强为0.90 MPa情况下,其气缸最小直径选择为22 mm,中心轴外径为10 mm。通过更换不同直径毛刷,可满足对30 mm、35 mm和37 mm系列小口径来复线炮膛的擦试保养需求。
4.2 滑块的往复行程分析
使用的场合以及机构的行程决定了滑块的往复行程,大多数情况下不会选择全行程,充分考虑滑块外圆周上前后气体环槽与缸套进气口的位置关系,为保证气源动力的连续性,具有持续的清洗效果,滑块的往复行程一般设计为5~10 mm。
4.3 滑块的运动速度分析
滑块的运行速度主要与空压机排气量和管口大小有关。通过样机实验,滑块往复振动频率在50~170 次/s范围内,可以有效地擦拭炮管内膛,效果较好。
5 结束语
随着科学技术的快速发展,各行各业的很多人工劳动都被机器和科技所取代。小口径防空火炮内膛往复振动式气动擦拭机器人的研制,能迅速有效完成炮膛的清洗、保养及保管工作,可进行标准化控制,降低强度、节省劳动时间。另外,本设计采取的是气动擦拭方式,这种方式原理简单、可靠性高、安全性能好,并且操作方便、使用寿命长、维护成本低,所以其经济性和环保方面都十分不错。因此,设计制作完成小口径防空火炮内膛往复振动式气动擦拭机器人,并进行实装擦拭实际运用,可以显著提高火炮的清洁效果,并且其维护保养和身管寿命都可以有效提高。