基于Arduino控制的指甲修剪器的设计与实现
2021-04-01徐一栋袁泉
徐一栋,袁泉
(宁波工程学院 机械工程学院,浙江 宁波315211)
0 引言
我国目前正处于人口老龄化加速时期,至2015年底,中国60岁及以上老年人口达2.22亿,占总人口的16.1%。预计到2020年,中国老年人口将达到2.48亿,老龄化水平将达到17.17%[1]。养老问题变得日益凸显,因此提升老年人的生活品质,使他们的生活充满获得感和幸福感是十分有必要的[2]。指甲刀为人们带来了很大的方便,而现有的指甲刀通常是将剪切刃设置在压板上,并用手进行修剪指甲,而对脚指甲进行修剪时,通常需要弯腰才能完成修剪动作,对于大多数人而言,剪脚指甲是个十分简单的事情,然而很多老年人却为这件“小事”而发愁[3]。人到老年,多出现视力障碍[4]的白内障、视网膜病变、黄斑变性、角膜混浊、玻璃体混浊、青光眼等眼部疾病[5],老年人对判断高差和有少量光影变化的能力减弱,而且他们的新陈代谢较慢,就会导致指甲甲板坚硬、偏厚且表面凹凸不平,特别是脚指甲,很容易在剪的过程中剪伤。同时,老年人的腿部肌肉随年龄的增长,骨骼肌纤维体积和数量减少、肌力下降、功能减退、灵活程度下降[6],肌肉的强度以及控制能力也都不断减退,老年人弯腰困难,腿部肌肉很难协调;[7]如果长时间弯腰蜷缩着剪脚指甲,会有蜷缩压抑的感觉,很容易出现身体失衡、头晕等状况。为防止意外的发生,当脚指甲需要进行修剪时,就常常需要别人的帮助才能完成。鉴于此问题,研究设计了一款脚指甲修剪器,该指甲修剪器主要用于老年人修剪脚指甲,特别适合那些子女不在身边的独居老人修剪脚指甲;该指甲修剪器电控与手动结合,减轻了老人独自修剪脚指甲存在的弯腰困难、视线不清等问题,可以成为他们生活中必不可少的工具,给生活带来极大方便。
1 新型指甲修剪器的设计背景
1.1 现有指甲修剪器的功能分析
市面上现有的指甲修剪器主要分为两种,手动与电动。手动指甲修剪器即我们生活中常用的指甲钳,由上、下二压柄构成,前端穿设有一嵌销,其中该上压柄之前端凹设有一呈U形的凹槽。该U形凹槽的中央形成有一横条,后端则设置有一凸体;该下压柄由固设在一起的上、下二压板构成;该上、下二压板的前端则设置有一相对的穿孔,其两侧分别形成有一相对的切断部。当按压上、下二压柄时,上压柄上的凸缘便顶压上压板,使上、下压板两侧的切断部相互切合。普通指甲钳在修剪手指甲时比较灵活方便,但在修剪脚指甲时由于指甲钳短小需要大幅度的身体弯曲,增添了肌肉的负荷,尤其是老年人在使用时由于身体机能的退化控制不好力度,容易误伤自己。电动指甲修剪器主要通过磨指甲的动作完成修剪,电机带动磨头旋转,与指甲主动接触,此种方式适合婴儿修剪指甲,因其指甲软而薄。电动指甲钳使用较安全,但整体效率不高只能作为辅助工具使用。
1.2 新型指甲修剪器的设计要求
为了兼顾老人视力模糊、弯腰困难的问题,本文所设计的指甲修剪器应满足以下要求:
①采用主动驱力方式;
②装置应有放大机构;
③由于装置功能为修剪指甲,精度需要控制到位;
④为适应不同的脚型,要求装置可在一定范围内调整;
⑤为减少老年人弯腰压力,应尽量采取舒适坐姿修剪。
2 新型指甲修剪器的设计
2.1 设计流程
该产品设计时主要从产品的原理、结构、功能等角度进行综合考量,这也是决定产品性能的关键步骤。其设计流程如图1所示:
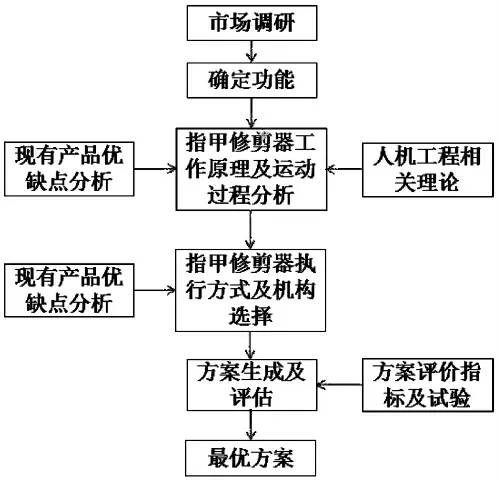
图1 设计流程图
2.2 新型指甲修剪器的组成及工作原理
本装置主要由收紧机构、十字滑轨定位机构、调节与修剪机构,控制模块四部分组成(如图2),通过三个步进电机和一个直流电机驱动工作。电机的正转、反转、速度的智能控制,由PWM控制系统的控制实现。调制脉冲信号由Arduino Mega2560单片机产生并控制电机工作。其中三个电机的转动由按钮控制,对按钮的按下操作进行计数与循环,每一数字对应相应的电机转动步数,数字在一定范围内循环。余下一个电机由脉冲手轮控制,单片机接受手轮的脉冲信号判断正反转和转动步数。通过以上方式实现不同电机间配合工作。修剪脚指甲通过修剪把手实行手工修剪,把手带动钢丝,钢丝收缩传递剪切力。在脚踏板下加入蜗轮蜗杆结构实现脚的修剪角度调节。结构优化实现结构的折叠功能。
使用者将指甲修剪器的底板调节好,然后将折叠杆竖立起来,调整好把手的高度;然后坐在椅子上,将脚趾按照顺序依次穿过脚趾隔板。固定好脚趾后,打开直线电机。通过丝杠将旋转运动转化为直线运动,推动脚托移动。当触碰到脚后跟的时候,将电机停止运作;再将脚背上的魔术贴贴紧,就完成了对脚趾的分离和固定。方便了之后的定位工作,同时也大大增加了产品的安全性。
通过按钮打开滑轨的电机,滑块进行左右横向移动,用单片机编程进行控制操控,移动到脚趾的位置停止;然后使用者手动操作脉冲手轮,控制指甲钳的纵向进给运动。当脚趾头有轻微的触感时,微调指甲钳的位置;当指甲露出时,捏把手上的手刹。通过刹车线将拉力传递到指甲钳上,使指甲钳下拉进行修剪;如果需要对指甲的侧面进行修剪时,回退指甲钳,按下开关。蜗轮蜗杆的蜗杆转动,带动蜗轮转动,蜗轮与上底板固联,万向轮进行运动,可以进行微小的角度调整。向左完成一次工作,向右再完成一次工作,可以修剪指甲的两边,实现对脚指甲全方位修剪,这样就完成了对一个指甲的修剪。接着调节脉冲手轮,使纵向滑轨向后退出;然后单片机控制横向滑轨到下一个脚趾,再次进行修剪工作,直到修剪完所有脚指甲。
使用完,可以将底板放平,把折叠杆折叠放好。底板还有一个把手,可以提到一个不需要太大空间的地方。占用空间率小,使用的时候方便快捷。
2.3 各部分模块设计
1)收紧机构
收紧机构主要由脚指隔板、魔术贴、脚托、万向轮、直线电机等构成(如图3)。针对机械化剪脚指甲这一问题,必须实现脚的固定,根据原则指甲刀装配后与底座角度不宜过大,趋于平行[8],从而避免脚的抖动而产生的不必要的人身伤害。自然状态下各个脚指处于一个紧贴的状态,我们通过设计脚指隔板的方式将脚指分离开来。前部脚指分离后,我们利用直线电机带动脚托运动实现脚的前后固定。最后用魔术贴固定脚背,进而完成整体的固定,大大提高安全性与准确性。
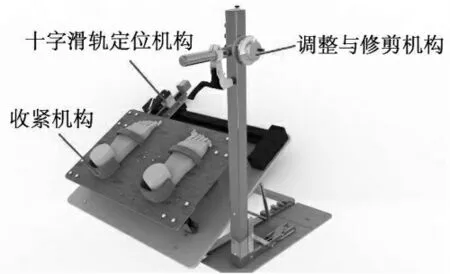
图2 三维渲染图

图3 收紧机构
具体操作步骤:脚指按照顺序依次穿过脚指隔板,按动启动按钮使安装在踏板下的直线电机运转,通过丝杠将电机的旋转运动转化为直线运动。滑块连接着螺纹杆,螺纹杆穿过脚托的孔,推动脚托向前移动;当触碰到脚后跟时,停止电机运动,将脚背上的魔术贴贴紧,从而达到对脚的固定。
2)十字滑轨定位机构
十字滑轨定位机构(如图4)由纵向滑轨、横向滑轨、电机、指甲钳、滑块、指甲钳固定座构成。若通过手动控制前端的指甲剪的横向、纵向进给,则过于繁琐,我们通过十字滑轨机构进行解决。利用编程及控制实现指甲剪的大致定位,减少人力控制,提高工作效率。
具体实施步骤:按动按钮启动已有程序,电机驱动滑块在横向滑轨上进行左右移动,通过单片机控制,使滑块定位到某一特定位置;接着用脉冲手轮给出信号,实现滑块在纵向滑轨的进给,使指甲钳贴合脚指,使指甲与肉分离,实现精准定位,修剪脚指甲更加的可靠。
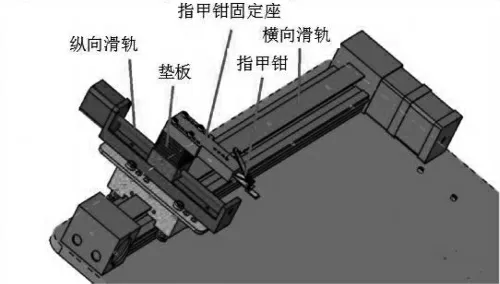
图4 十字滑轨定位机构
3)调节与修剪机构
调节与修剪机构(如图5、6)主要由把手、脉冲手轮、手刹、指甲钳、钢丝、蜗轮蜗杆等构成。考虑到修剪脚指甲的安全性,我们采用手动对指甲钳进行剪切这一操作,这就要求我们能用手部进行控制,并将控制传递到指甲剪处。因此我们从自行车刹车机构中得到灵感,在控制处装上手闸,实现指甲刀的剪切。这样既可以满足使用时的实际需要,又提高空间的利用率。对于对指甲的边缘进行修剪这一问题,我们通过安装在踏板下的蜗轮蜗杆来实现,使整体偏转一个小角度。
具体实施方式:按下按钮控制板启动已有程序,通过十字滑轨定位机构中的电机驱动前端脚指甲剪的横向移动,并精确定位。借助电子脉冲手轮控制纵向滑轨,实现滑块上的脚指甲剪纵向的移动,利用脉冲手轮可以精确调节,让使用者感受到一定力的时候停止进给,进而控制修剪脚指甲所需的纵向进给量。采用手闸拉线的方式,将手部的力量传递到指甲剪的末端,缩紧拉线可使指甲剪上端向下端挤压以实现指甲的安全修剪。给出特定命令将实现踏板下蜗轮蜗杆的运转,使踏板微调一定角度,一左一右的移动踏脚板,实现脚指甲边缘的修剪。蜗轮蜗杆的自锁性能保证了在修剪时脚的稳定性,控制电机的转动速率带动蜗杆平缓的转动增加了安全性。

图5 调节与修剪机构图
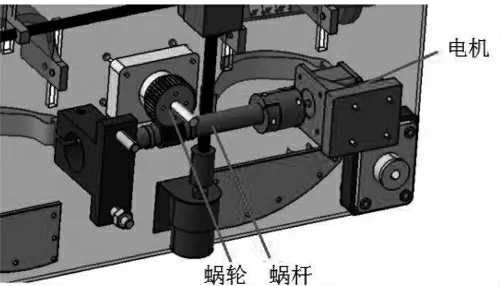
图6 踏板背部机构图
4)单片机模块
Arduino Mega2560采用USB接口的核心电路板,Mega2560的处理器核心是ATmega2560。Mega2560同时具有54路数字输入/输出口(其中16路可作为PWM输出)、16路模拟输入、4路UART接口、一个16MHz晶体振荡器、一个USB口、一个电源插座、一个ICSP header和一个复位按钮。Arduino Mega2560可以通过3种方式供电,而且能自动选择供电方式。ATmega2560有256k的闪存可存储程序(其中8 kb用作bootloader),使用Arduino IDE软件编写程序。
5)电机驱动模块
TB6600驱动器是一款专业的两相混合式步进电机驱动器,其驱动模块见图7。输入电压为9~42 VDC,输出电流为0.5 A~4.0 A,静止时电流自动减半,可驱动4,6,8线两相、四相步进电机。光耦隔离信号输入,抗干扰能力强,具有过热、过流、欠压锁定、输入电压防反接保护等功能。本电路采用共阳极接法,使能信号端悬空(见图7)。
L298双H桥直流电机驱动板可驱动2路直流电机,使能端ENA、ENB为高电平时有效。逻辑部分端子供电范围:+5 V~+7 V。要对直流电机进行PWM调速,设置IN1和IN2,确定电机的转动方向,然后对使能端输出PWM脉冲,即可实现调速。
6)电机控制模块
选用RGT600脉冲手轮(4端子100 p/r),驱动器输出型,抗干扰能力强。电源电压DC+5 V电路特征:C集电极开路输出、F互补输出、E电压输出、L长线驱动输出。
7)控制程序模块设计
控制程序使用Arduino语言,通过Arduino IDE软件烧录到单片机中,把AVR单片机(微控制器)相关的一些参数设置都函数化。程序主要使用了Arduino的第三方库

图7 TB6600驱动器接线图
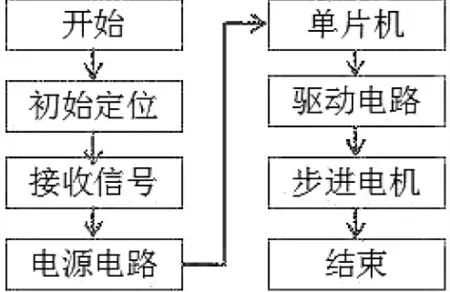
图8 控制系统框图
3 试验结果分析
(1)定位精度分析
机构实物图如图9所示,该机构使用两台小型步进电机及蜗轮蜗杆构成主要电控装置。其中两台步进电机的步距角精度均为1.8°±5%,有效保障了产品工作的准确度。
(2)修剪传动机构性能分析
该机构中修剪脚指甲所用的指甲钳可通过市面产品经过简单加工而成,从而提高了修剪工具的可替换性与产品使用的可持续性,为广大老年适用群体提供了便利。指甲钳主要通过机构限位及螺丝旋紧进行加固,保证了工作状态的稳定度与安全性。指甲钳前方的安全块使得指肚与指甲实现分离,而后再进行剪切。本产品的剪切传动机构借鉴于自行车刹车装置,使用钢丝绳连接操作手柄与指甲钳拉绳实现传动剪切,利于增强装置的剪切稳定性,有效延长使用寿命。
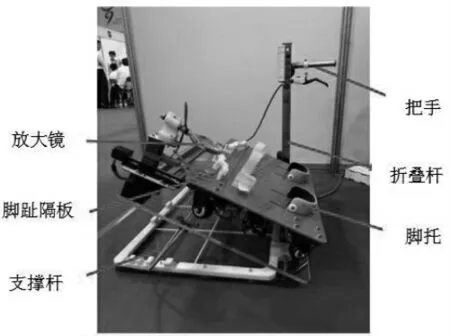
图9 指甲修剪器实物图
4 结语
本研究从老年人独自修剪脚指甲的困难出发,通过对修剪脚指甲的动作分析,进行合理的结构设计,依据老年人日常生活的特性和其所能承受的力学要求,设计了一种新型指甲修剪器。该修剪器综合运用了人机工程学理论,三维仿真技术;该装置采用电动和手动结合方式,能有效帮助老人以舒适姿态独自完成脚指甲的修剪,使用简单方便,对提升老年人居家生活品质具有重要意义。
