电力作动系统容错电机拓扑结构与控制策略
2021-03-31张成糕郝雯娟
王 宇,张成糕,郝雯娟
(南京航空航天大学自动化学院,南京211106)
全电/多电飞机已成为下一代先进战斗机的发展趋势,当今的科学技术水平使多电飞机的实现成为可能。未来全电/多电飞机将在可靠性、维护性、保障性、战斗受损后的生存能力、全周期费用和飞机性能等方面取得显著改善。目前全电/多电飞机的研究主要集中在发电、配电和电力作动3 方面[1⁃2]。广泛应用于飞机刹车、舵面控制以及油泵等关键系统中的电力作动器应具备高功率密度、高可靠性和强容错能力,这要求其关键部件——容错电 机 具 备 如 下 能 力[3⁃5]:
(1)电气隔离能力
在传统的交流电机驱动系统中,各相绕组采用星型连接方式和全桥拓扑结构,当电机驱动系统出现故障时,故障相的电流或者母线电压会通过中心点耦合到其他正常相绕组,使得系统不能正常工作。为了降低各相的电气耦合,容错电机的各相绕组采用H 桥的拓扑结构单独供电,可以实现绕组间的电气隔离。
(2)物理隔离能力
定子绕组采用非交叠集中式电枢绕组,如图1所示,容错电机的每个定子槽中仅有一相绕组的线圈边,各相绕组间不存在物理接触,实现了电机各相绕组的物理隔离。
(3)热隔离能力
由于隔磁齿(容错齿)的存在,相邻绕组间不存在物理接触,使得短路故障相产生的热量很难传递到相邻绕组,从而实现了绕组间的热隔离。
(4)磁隔离能力
当系统发生短路时,若绕组间存在磁耦合,短路相会在正常相产生感应电压,从而破坏整个电机驱动系统,因此,磁隔离能力是电机容错性能的重要体现。绕组间采用隔齿绕制方式为各相绕组的磁场提供了回路,减小了各相绕组的互感。
(5)短路电流抑制能力
绕组短路故障是电机控制系统中最严重的故障类型之一,若不限制短路电流,将会损坏整个电机控制系统,因此短路电流抑制能力是电机容错性能的重要体现之一[6⁃8]。
为实现上述容错能力,近年来,容错电机的拓扑层出不穷[9⁃50],主要包括容错型开关磁阻电机、容错型转子永磁式电机、容错型定子永磁式电机以及容错式磁场调制电机、容错型磁齿轮双边电机等;针对每种容错电机,基于补偿控制思想的容错控制算法被提出[51⁃70],主要分类如图2 所示。
本文从拓扑结构和控制算法两大方面对电力作动系统用容错电机的关键技术进行了分析和总结。
在拓扑结构方面,在分析了各种原型电机固有电磁性能和固有可靠性的基础上,重点比较了每种原型电机引入容错设计(非交叠集中式绕组、容错齿模块化和电枢齿极靴)后对原有电磁性能的影响,定性分析了不同原型电机电枢磁场与励磁磁场磁路关系对容错能力提升的“阻碍作用”和“帮助作用”。在此基础上,纵向归纳了电机容错设计的通用设计方法和一般规律。
在控制策略方面,依托两大经典控制算法——矢量控制和直接转矩控制,采用补偿控制思想,基于电流矢量重构技术和基于电压矢量重构技术两大类方法被提出。从容错驱动系统的关键控制量(电磁转矩)和目标控制量(电机转速)的稳态性能和动态性能两个指标,分析了上述两大类算法的内在联系与优缺点。研究了转矩冲量平衡控制,同时提高了电磁转矩和电机转速的动态性能。
对于具有代表性的容错电机和控制算法,给出了仿真和实验的比较结果,对上述总结的设计方法、一般规律和控制算法性能进行了验证。最后总结展望了容错电机系统相关理论和技术研究的发展方向。
1 容错电机的拓扑结构
1.1 容错型开关磁阻电机
图3 为12/8 开关磁阻电机,图4 为其一相绕组的功率电路。除了定、转子结构简单可靠之外,开关磁阻电机系统固有的高容错性能如下[9⁃11]。

图3 12/8 开关磁阻电机Fig.3 12/8 switched reluctance motor
(1)磁隔离能力。虽然采用的是交叠集中式电枢绕组结构,但是由于其特有的工作模式和磁路结构,开关磁阻电机的互感/自感比较小。
(2)短路电流抑制能力。开关磁阻电机属于自励磁电机,当某一相绕组发生短路故障时,由励磁源(永磁体)引起的短路电流为零。
(3)电气隔离能力。如图4 所示,开关磁阻电机的每一相绕组均由一个独立的不对成半桥电路控制,各相绕组电流控制独立,电气隔离能力强。
为进一步提高开关磁阻电机的容错性能,东南大学花为教授等在文献[12]中提出了非交叠集中式电枢绕组开关磁阻电机(Switched reluctance ma⁃chine with non⁃overlapping concentrated winding,NOCW⁃SRM)结构,如图5 所示,并与交叠集中式电枢绕组开关磁阻电机(Switched reluctance ma⁃chine with overlapping concentrated winding,CW⁃SRM)进行了电磁性能的比较:
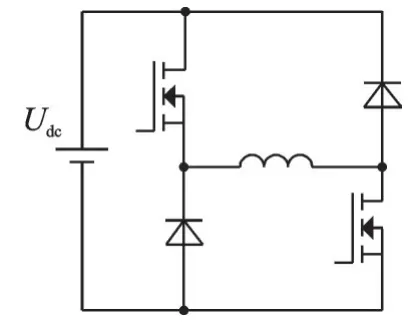
图4 开关磁阻电机功率变换器Fig.4 Power converter of switched reluctance motor
(1)与CW⁃SRM 相比,NOCW⁃SRM 具有相对较大的自感数值和自感变化率,因此转矩密度较高,这一优势在电机轻载时尤为明显。同时由于磁路饱和得更快,在重载时,这一优势有所削弱。
(2)相同相电流下,NOCW⁃SRM 具有相对较高的相电压,从而需要其变换器系统具有相对较高的母线电压。
(3)采用非交叠集中式电枢绕组,NOCW⁃SRM 具有较强的物理隔离和热隔离能力。同时,较大的自感提高了短路电流抑制能力。与CW⁃SRM 相比,NOCW⁃SRM 可以达到更高的槽满率和转矩/电流比。
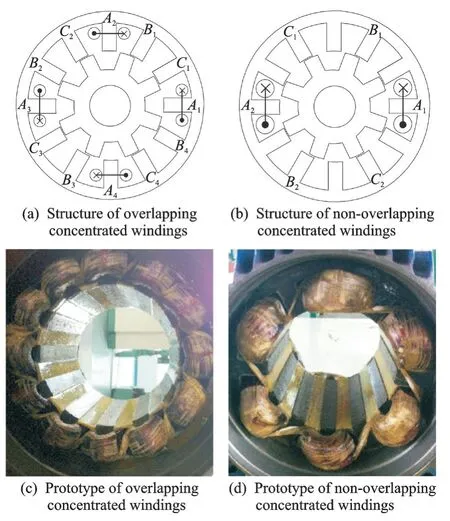
图5 不同绕组结构开关磁阻电机[12]Fig.5 Different winding structures of switched reluctance motor[12]
对于NOCW⁃SRM,英国谢菲尔德大学诸自强教授等深入研究了隔磁齿的结构对电机性能的影响[13]。NOCW⁃SRM 的隔磁齿可以采用非模块化隔磁齿结构、模块化隔磁齿结构(无磁桥)和模块化隔磁齿结构(带磁桥),如图6,7 所示,比较结论如下。
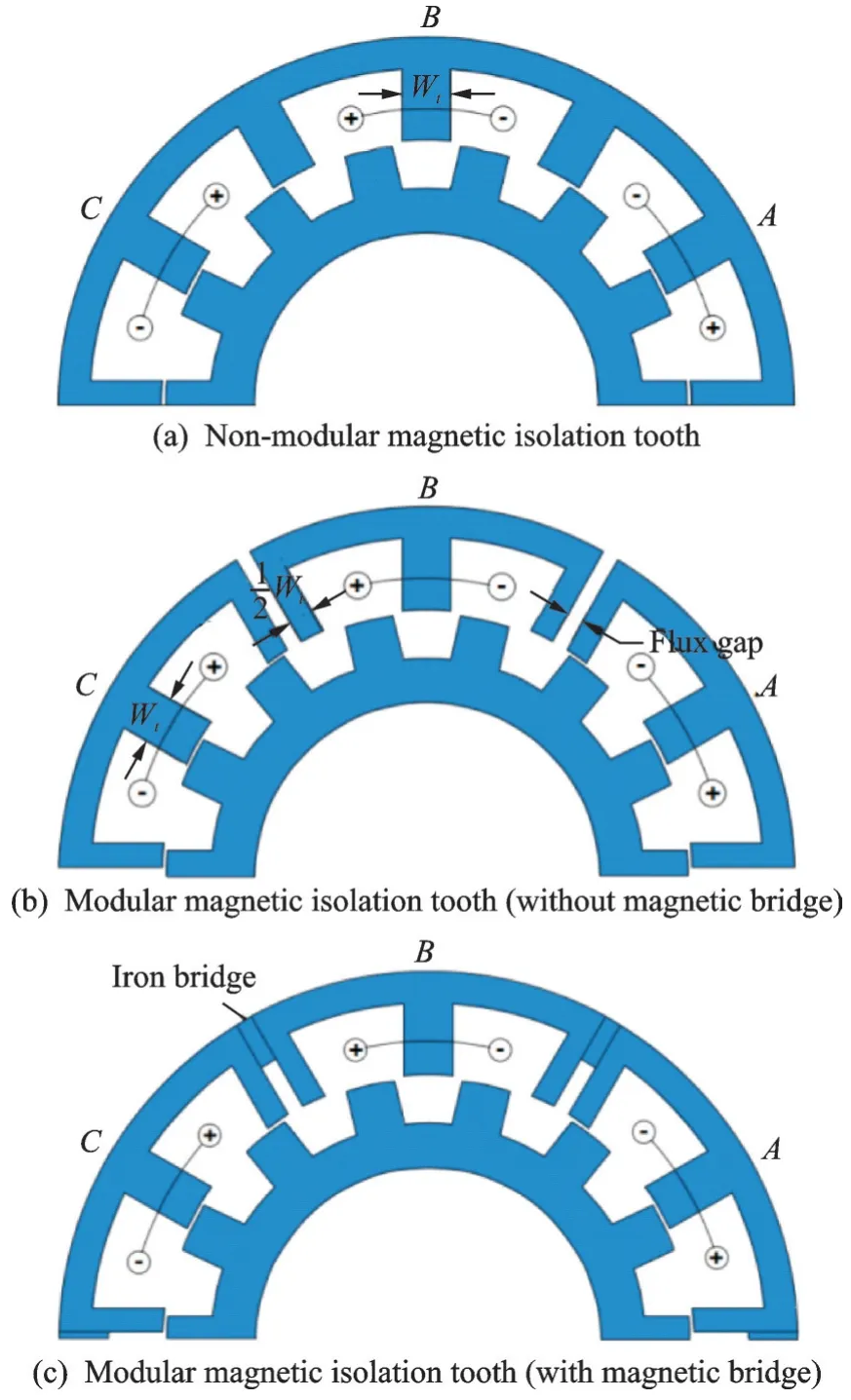
图6 非交叠集中式电枢绕组开关磁阻电机拓扑[13]Fig.6 Switched reluctance motor with non⁃overlapping con⁃centrated windings[13]

图7 非交叠集中式电枢绕组开关磁阻电机[13]Fig.7 Switched reluctance motor with non⁃overlapping con⁃centrated windings[13]
(1)12/8 非模块化隔磁齿结构的NOCW⁃SRM 和12/14 模块化隔磁齿结构(无磁桥)的NOCW⁃SRM 具有相对较高的平均转矩。
(3)由于饱和成度差异,12/14 模块化隔磁齿结构(无磁桥)的NOCW⁃SRM 在重载时具有更高的转矩输出能力。
(4)同时,12/14 模块化隔磁齿结构(无磁桥)的NOCW⁃SRM 具有相对较小的转矩脉动。
(5)与非模块化隔磁齿结构的NOCW⁃SRM相比,模块化隔磁齿结构(无磁桥)的NOCW⁃SRM具有相对较小的铁耗、振动和噪音。
容错型开关磁阻电机用于电作动系统,具有的优 势 如 下[14⁃15]:
(1)电机结构简单,制造维护方便。
(2)功率密度与普通感应电动机相近。
(3)只需单向电流供电,控制系统较简单;并且一相绕组出现故障时,电机仍然可以正常工作,即具有一定的容错性。
但与永磁同步电机相比,其不可避免存在转矩波动,并且效率相对较低,从而使它的容错性逊色很多,因此国内外开始提出了其他各种容错电机系统方案[16]。
1.2 容错型转子永磁式电机(表贴式)
1993 年英国Newscastle 大学的Mecrow 教授在IEEE 发表了一篇关于H 桥逆变器故障诊断文章[17],为他在1995 年提出容错型转子永磁式电机(表贴式)的方案铺定了基石。1996 年,Mecrow 教授在IEEE 发表了一篇关于容错型转子永磁式电机(表贴式)(Fault tolerant surface⁃mounted perma⁃nent magnet machine, FTSMPMM)和开关磁阻电机的容错性能比较的文章,从此以后拉开了永磁容错电机的序幕[18]。同年,他们将FTSMPMM 应用于飞机油泵驱动系统中,先后完成了六相和四相永磁容错电机系统,并在2003 年实现了无速度传感器的永磁容错电机控制系统[19⁃20]。Sheffield 大学与英国的IUCAS 航空公司合作,研发永磁容错电机在飞机的机电作动系统中的控制与应用,从而显示了永磁容错电机在航空系统中的强大生命力[21⁃22]。
FTSMPMM 的拓扑结构如图8 所示。如前所述,采用非交叠集中式电枢绕组结构,实现了相绕组之间的物理隔离能力、磁隔离能力和热隔离能力。而实现短路电流抑制能力则较为复杂,论述如下:
当某相绕组发生端部短路故障时,稳态短路电流表示为[8]

图8 容错型转子永磁式电机(表贴式)的拓扑结构Fig.8 Topology of FTSMPMM

式中:E0表示电机的空载反电势;Ls、Lsm、Lsσ分别为相绕组的自感、激磁电感和漏感;R 为相绕组电感;ωe为电角频率。在一定的空载反电势下,忽略电阻,短路电流仅与绕组电感有关。通过合理地设计电机的激磁电感和漏感,可以达到抑制短路电流的目的。
对于FTSMPMM,永磁体是电枢磁场磁路的一部分,电枢磁场经过永磁体。由于永磁体的相对磁导率约为1,所以FTSMPMM 的激磁电感相对较小,利用激磁电感来抑制短路电流较为困难,且存在退磁危险。因此,FTSMPMM 一般采用增大漏感的方法来抑制短路电流[7]。
文献[8]对FTSMPMM 的电感特性进行了详细的分析:永磁容错电机的绕组自感主要有激磁电感、槽口漏感、端部漏感、谐波漏感以及槽内漏感组成,与一般电机不同的是,激磁电感占自感的比例较少,而槽口漏感和谐波漏感占自感的比例较大,占95%左右,因此永磁容错电机具有大漏感的特点,表明永磁容错电机的设计与控制有其自身的特殊性。通过谐波漏感的量化分析可以看出,谐波漏感的含量很高,约占总激感的86%,因此增加自感可以通过两种方法来实现,即合理地设计槽口漏感和谐波漏感。同时,谐波漏感的量化分析也反映了电机中存在大量谐波,尤其是低次谐波,其含量约占总谐波的45%。
在原有拓扑的基础上,文献[23]提出了如图9的改进设计,通过优化设计容错齿的形状和尺寸,可以提高气隙磁密的基波幅值并有效减小气隙磁密的5 次谐波,从而提高了转矩输出能力并减小了转子铁耗。
文献[24]则是通过在转子轭上设置磁障减小了电枢反应,如图10 所示,从而减小了永磁(Per⁃manent magnet,PM)磁损耗、转子铁耗和永磁体温升。

图9 改进型容错齿结构[23]Fig.9 Improved fault tolerant tooth structure[23]

图10 表贴式外转子永磁容错电机[24]Fig.10 Surface mounted rotor permanent magnet fault tol⁃erant motor[24]
文献[25]研究了FTSMPMM 电机的模块化设计,通过在隔磁齿(容错齿)上增加磁障,如图11 所示,降低了电机的互感和加工难度,转矩密度有所降低[26]。其中12/14 结构比12/10 结构具有相对较高的转矩密度,同时通过合理地设计磁障宽度可以有效地减小电机的定位力矩。
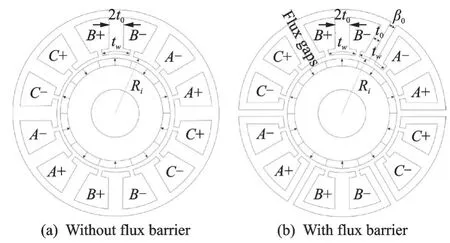
图11 模块化容错型转子永磁式电机[26]Fig.11 Modular fault tolerant rotor permanent magnet ma⁃chine[26]
文献[27]重点研究了永磁体离心高度对电机电磁性能的影响,如图12 所示,通过合理设计离心高度h,可以提高空载反电势的正弦度并减小定位力矩。
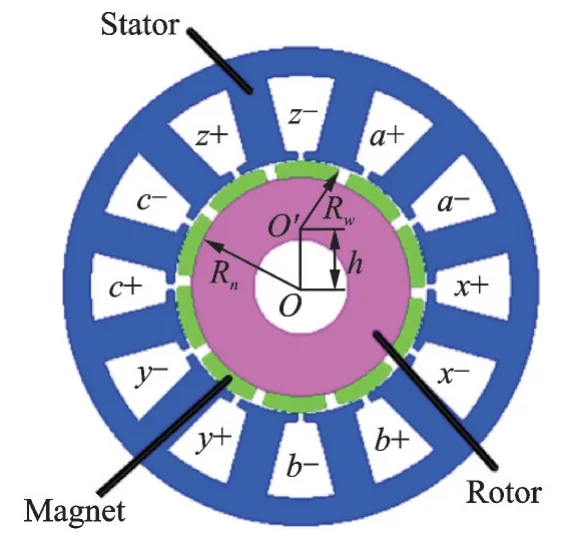
图12 容错型转子永磁式电机[27]Fig.12 Fault tolerant rotor permanent magnet machine[27]
1.3 容错型转子永磁式电机(内置式)
与转子永磁式电机(表贴式)相比,转子永磁式电机(内置式)(Interior permanent magnet machine,IPMM)具有永磁体易于固定和保护、直轴与交轴磁路不对称的特点。以上特点使得容错型转子永磁式电机(内置式)具有优于容错型转子永磁式电机(表贴式)的电磁性能[28]。
(1)如图13 所示,在d 轴位置,有部分电枢磁场磁力线没有经过永磁体而直接闭合;在q 轴位置,电枢磁场磁力线基本都没有经过永磁体而直接闭合。因此,IPMM 的永磁体退磁风险相对较小,在实现短路电流抑制能力时,无需采用增加漏感的方式来抑制短路电流,即IPMM 在提高容错能力的同时可以保持相对高的电枢磁场利用率和转矩密度。
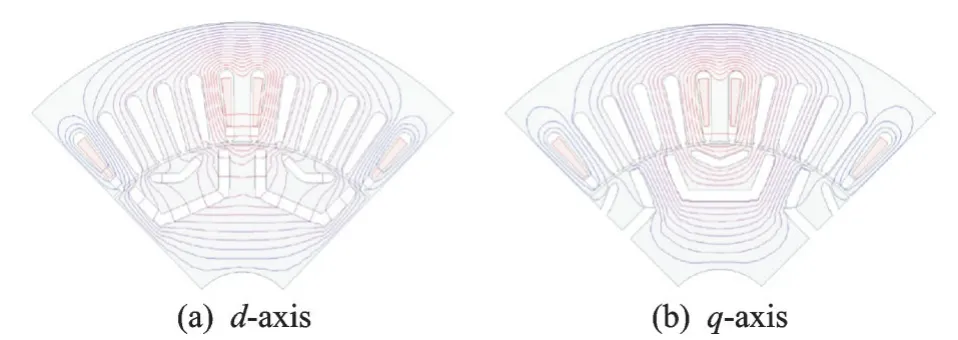
图13 转子永磁式电机(内置式)的电枢磁场[28]Fig.13 Armature reaction magnetic flux lines of IPMM[28]
文献[29⁃33]研究的多三相内置式永磁电机的容错结构如图14 所示。与原始结构相比,容错拓扑的电枢绕组采用了区域集中结构,即绕组群“BCA”“EFD”和“HIG”之间均有容错齿相隔,减小了互感,提高了磁隔离能力。如前所述,原始结构与容错结构的定转子结构均未发生变化,即永磁体的磁路未发生改变,永磁体的利用率不变。
(2)容错型转子永磁式电机(内置式)的直轴与交轴磁路不对称,在弱磁区域(d 轴电流小于0)可以提供磁阻转矩。
文献[34]研究了容错型转子永磁式电机(内置式)的改进结构,如图15 所示。与图15(b)中的原始结构相比,图15(a)采用双层永磁体结构,使得直轴电感数值与交轴电感数值的差异进一步增加,从而改进结构提高了恒功率区域的转矩输出能力。
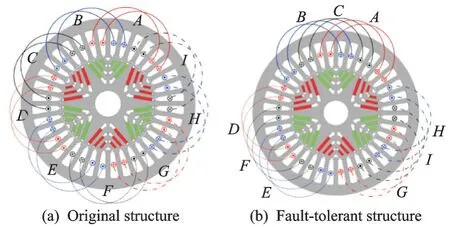
图14 多三相内置式永磁电机[29]Fig.14 Multiple three⁃phase IPMM[29]

图15 容错型转子永磁式电机(内置式)[34]Fig.15 Fault tolerant IPMM[34]
(3)聚磁效应可以提高永磁气隙磁密。文献[35]对图16 中两种五相内置式永磁容错电机的电磁性能进行了研究,由于聚磁效应的存在,两种电机同在具有强容错能力的同时,还具有较高的转矩密度。文献[34]进一步发现,辐条型磁钢具有更强的聚磁效应,从而在输出相同的电磁转矩时,辐条型磁钢结构可以采用更少的永磁体,降低了系统成本。

图16 两种五相内置式永磁容错电机[35]Fig.16 Two types of five-phase fault tolerant IPMMs[35]
综上所述,与容错型转子永磁式电机(表贴式)相比,容错型转子永磁式电机(内置式)具有容错能力、弱磁能力与转矩能力相互制约小,在实现容错性能的同时可保持高转矩密度并具有宽调速范围的优点。
1.4 容错型永磁双凸极电机
图17(a)和图17(b)分别给出了6/4 容错型永磁双凸极电机和12/8 容错型永磁双凸极电机的拓扑结构,可以看出,永磁双凸极电机是在开关磁阻电机的基础上,将永磁体嵌入到定子轭中。

图17 永磁双凸极电机[36]Fig.17 Permanent magnet doubly salient motor[36]
与开关磁阻电机、容错型永磁同步电机相比,容错永磁双凸极电机的优势如下[36]。
(1)永磁体的引入,实现了电机的全周期运行,电机铁磁材料利用率提高,转矩密度提高。
(2)与容错型永磁同步电机相比,转子结构简单坚固,永磁体不受离心力,退磁风险小。同时电枢磁场对永磁体影响小,无须采用增加漏感的方法来实现短路电流抑制能力。
容错型永磁双凸极电机的研究揭开了容错型定子永磁式电机拓扑研究的篇章。容错型定子永磁式电机拓扑的研究不仅丰富了电力作动系统容错电机的种类,而且定子永磁式电机固有可靠性的优势有助于提高容错电机系统的整体性能。
容错型永磁双凸极电机同时存在以下一些不足[37⁃38]:
(1)容错型永磁双凸极电机的励磁磁链为单极性,励磁磁链的直流分量对产生转矩不做贡献,影响了电机的铁磁材料利用率和转矩密度。
(2)容错型永磁双凸极电机的励磁磁链为不规则的三角形波形,导致反电势为马鞍型波形,含有大量谐波。不管采用电流方波控制(Brushless DC,BLDC)还是电流正弦波控制(Brushless AC,BLAC),转矩脉动相对较大。一般地,为提高反电势的正弦度,需采用转子斜槽结构,如图18 所示。

图18 永磁双凸极电机(斜槽转子)[37]Fig.18 Permanent magnet doubly salient motor (skewed rotor)[37]
1.5 容错型永磁磁通切换电机
永磁磁通切换(Flux⁃switching permanent mag⁃net, FSPM)电机与永磁双凸极电机一样,永磁体置于定子,不受离心力,散热条件良好,转子结构简单坚固。与永磁双凸极电机相比,永磁磁通切换电机又具有以下特殊的优点[39⁃42]:
(1)永磁双凸极电机的励磁磁链为单极性,而永磁磁通切换电机的励磁磁链为双极性。双极性的励磁磁链提高了铁磁材料的利用率和电机的转矩密度。
(2)由于具有绕组“互补性”优势,因此,即使采用集中式绕组,永磁磁通切换电机的永磁磁链和空载反电势仍然具有较高的正弦度,适合运行在BLAC 模式,经典的矢量控制和直接转矩控制均可以应用到其驱动系统中。
基于以上优势,容错型永磁磁通切换电机的研究具有重要的学术价值。
图19(a)为传统的交叠式集中电枢绕组永磁磁通切换电机,在它的基础上,文献[43]首先研究了永磁磁通切换电机的非交叠集中式绕组结构,如图19(b)所示。在非交叠集中式绕组永磁磁通切换电机中,不缠绕电枢绕组的隔磁齿上的永磁体除了起到励磁作用以外,由于其高磁阻性质,有效地降低了相邻两相绕组地互感。文献[43]指出:

图19 集中电枢绕组永磁磁通切换电机[43]Fig.19 FSPM machine with concentrated windings[43]
(1)图19(a)的互感自感比为50%,而采用非交叠集中式绕组的12/10、12/11、12/13、12/14 永磁磁通切换电机的互感基本都可以忽略,当某一相发生绕组短路故障时,短路电流产生的磁场对相邻相的影响很小,永磁体的不可逆退磁风险大大减小。隔磁齿上磁障(高磁阻材料)宽度对电机电磁能力和容错能力的影响将在下文中论述。
(2)其中,12/11、12/13 非交叠集中式绕组永磁磁通切换电机由于仍具有绕组“互补性”优势,空载反电势具有高对称度;而12/11、12/13 非交叠集中式绕组永磁磁通切换电机失去了绕组“互补性”优势,空载反电势出现了一定程度的不对成性。
(3)以上4 种电机中,12/13 结构具有相对较低的永磁体损耗以及相对较高的转矩密度和效率。
为提高永磁体利用率,在非交叠集中式绕组永磁磁通切换电机的基础上,文献[44]提出了“E”型铁芯容错型永磁磁通切换电机,如图20 所示。文章比较了6/10、6/11、6/13“E”型铁芯容错型永磁磁通切换电机的电磁性能。与6/10、6/13 电机相比,6/11 电机具有相对较高的转矩输出能力。而与传统的12/10 永磁磁通切换电机相比,6/11“E”型铁芯容错型永磁磁通切换电机的转矩密度可以高出15%左右。

图20 6/10“E”型铁芯容错型永磁磁通切换电机[44]Fig.20 6/10 E-core fault tolerant FSPM machine[44]
文献[45]在“E”型铁芯容错型永磁磁通切换电机的基础上,引入了定子齿和容错齿的极靴设计,如图21 所示,研究表明:引入了定子齿和容错齿的极靴设计,可以将电枢绕组的自感提高到原始拓扑的300%左右,极大地提高了电机的短路电流抑制能力;同时进一步减小了相邻两相绕组之间的互感,所付出的代价是降低了电机的转矩输出能力。
文献[46]比较了图22 中3 种容错电机的电磁性能和容错能力,并分析了隔磁齿磁障尺寸对电机性能的影响:

图21 容错型永磁磁通切换电机(加极靴)[45]Fig.21 Fault tolerant FSPM machine (with pole shoe)[45]

图22 4 种永磁磁通切换电机[46]Fig.22 Four types of FSPM machine[46]
(1)与原始的12/10 电机相比,所有容错拓扑的转矩输出能力均有所降低,同时,由于自感的增加,容错拓扑的功率因素均有所降低。
(2)在图23 的6 种结构中可以看成是同一种电机在不同磁障宽度下的变化结构,当磁障宽度为0°时,该电机为E⁃core 电机,当磁障宽度由0°向负值变化时,隔磁齿宽度逐渐减小。当磁障宽度减小为-15°时,该电机变成C⁃core 电机。在由E⁃core电机逐步变成C⁃core 电机的过程中,电机的转矩输出能力逐渐减小。当磁障宽度由0°向正值变化时,电机的转矩输出能力也逐渐减小,如图24所示。
(3)对于传统12/10 结构和C⁃core 结构,相邻两相绕组之间没有容错齿这样的旁路结构,因此,当某一相绕组发生短路时,短路电流产生的磁场无阻碍地经过相邻相的永磁体,如图25(a)和图25(b)所示,导致这两种电机的不可逆退磁风险较大。E⁃core 电机中,由于部分短路磁场经过容错齿闭合,减小了不可逆退磁风险,如图25(c)所示。与E⁃core 电机相比,模块化结构的容错齿不仅可以为短路电流磁场提供旁路路径,其磁障结构增加了短路电流磁场的磁路路径的磁阻,如图25(d)所示,从而使得穿过相邻相永磁体的短路电流磁场进一步减小,因此模块化结构具有最强的抗不可逆退磁能力。
极靴设计可以提高电机的短路电流抑制能力,本质上是提高了电机自感中的漏感数值,必然会引起功率密度的降低;而增加电机激磁电感数值,则可以有效地提高电感数值并保持相对高的转矩输出能力。基于这一思路,将多齿结构[47⁃48]和容错型永磁磁通切换电机相结合,文献[49]研究了一种多齿容错永磁磁通切换电机,与传统容错型永磁磁通切换电机相比:
(1)多齿结构的永磁磁链幅值有所降低,但是较高的转子极对数提高了电机的反电势系数和转矩密度。
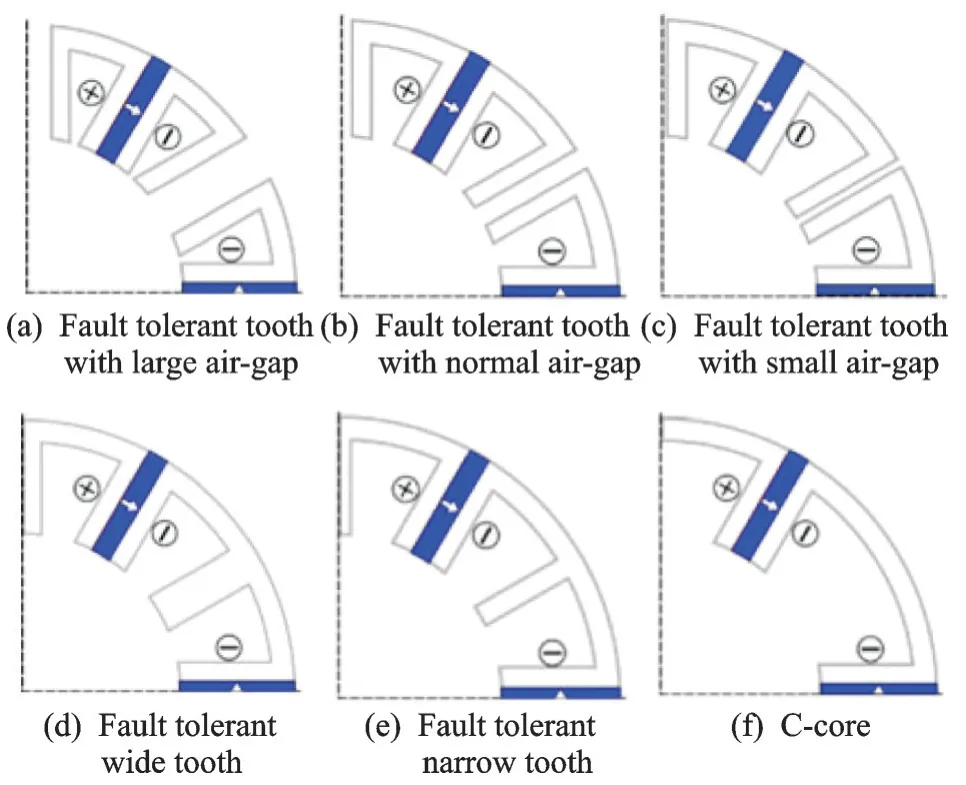
图23 6 种模块化结构[46]Fig.23 Six modular structures[46]

图24 磁障宽度变化时的输出转矩和转矩脉动[46]Fig.24 Average torque and torque ripple under different flux gap opening[46]

图25 退磁磁场磁力线[46]Fig.25 Demagnetizing flux lines[46]
(2)多齿结构提高了电机的气隙磁导和电感,从而电机具有较强的抑制短路电流的能力。
(3)多齿结构平滑了气隙磁导的变化趋势,使得电机具有相对较小的定位力矩。
特别地,当磁通切换电机工作在多相时(每相绕组线圈个数为“1”),绕组“互补性”将丢失,电机空载反电势中存在谐波。经典的斜槽结构固然可以降低谐波,但是反电势基波的幅值也会降低,从而影响了转矩输出能力。
为了保证容错型磁通切换电机的反电势对称度,同时不降低反电势基波幅值和转矩输出能力,文献[49]同时研究了分段转子结构,如图26,27所示。

图26 转子分段式多齿结构永磁磁通切换电机结构[49]Fig.26 Multi⁃tooth FSPM motor with twisted rotor[49]
转子分段式多齿容错永磁磁通切换电机的结构特点如下:
(1)两部分转子的角度错开180°电角度。
(2)同一定子齿上两部分的永磁体励磁方向相反。
采用以上结构,任一电枢线圈的中两部分反电势相位相差180°,反电势叠加后具有高正弦度,同时 基 波 叠 加 系 数 为1(-cos180°=1),如 图27所示。
分段转子结构在6/19 多齿容错永磁磁通切换电机上应用之后,文献[50⁃52]将其推广到其余永磁磁通切换电机结构中,建立了任意结构磁通切换电机采用分段转子结构时分段角的优化设计方法,有益效果如下:
(1)使得任意结构磁通切换电机无需绕组。“互补性”即可实现线圈的空载反电势高正弦度和对称性,丰富了磁通切换电机的定/转子数组合。
(2)分段角的优化设计方法可以在保证空载反电势高正弦度的前提下,同时减小定位力矩。

图27 转子分段式结构Fig.27 Twisted rotor structure
2 容错电机的控制算法
当电机发生开路或短路故障时,故障相的缺失以及短路电流的影响都会产生转矩脉动。必须调整剩余健康相电流的幅值和相位来减小转矩脉动。本节将从转矩脉动最小的角度,对各种容错电机的容错控制算法进行总结。
2.1 容错型开关磁阻电机控制算法
文献[53]研究了开关磁阻电机开路及短路故障下的电流重构算法,在图28,29 中,通过建立电机相绕组电流ia、ib、ic与两个特定电流传感器(LEM1 和LEM2)的 输 出 电 流iL1和iL2的 函 数 关系,求解不同状态下ia、ib及ic的数值,实现故障状态的稳定转矩输出。
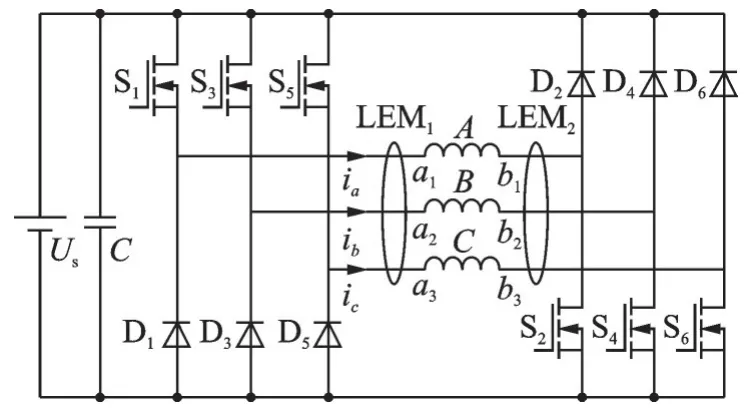
图28 电流传感器放置方式[53]Fig.28 Arrangement of current sensor[53]
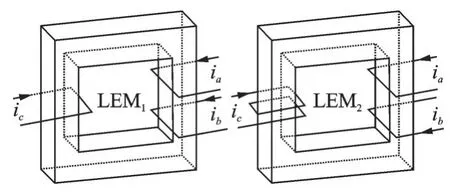
图29 电枢绕组缠绕方式[53]Fig.29 Winding mode of armature winding[53]
2.2 容错型永磁同步电机控制算法
文献[54]研究了“补偿故障相的平均转矩”的控制算法,当第k 相故障时,健康相电流表达式为

式中:T*e为给定电磁转矩;Pr为转子极对数;ωr为电机同步机械角频率。
上述控制算法在系统发生故障后仅补偿了转矩的平均量,并没有对转矩的脉动量进行抵消。若能够对故障态的脉动转矩,即对缺相不对称脉动转矩和短路脉动转矩进行相应抵消,那么系统在故障态的输出性能将进一步提高,文献[55]基于这一思路提出了最优电流控制策略,不但补偿故障相的平均转矩,而且抵消故障态的脉动转矩,实现故障态下转矩脉动最小化控制,其电流表达式如式(3)所示,从而使电机驱动系统在实现强容错的基础上,提高故障态的输出性能。

式中:T*e为给定电磁转矩;a1指平均转矩系数;a2为脉动转矩系数;θ(k)为不同故障组合时的综合脉动转矩相量的相角;Ts为短路相扰动转矩。
2.3 容错型永磁双凸极电机控制算法
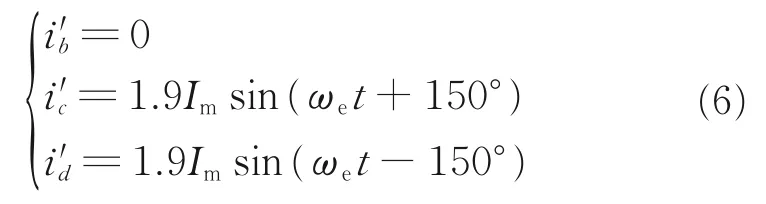
Zhao 等率先开展了永磁双凸极电机容错控制算法的研究,基于合成电磁转矩不变原则,推导了四相永磁双凸极电机在A 相开路时的健康相补偿电流[56]

式中:ib、ic、id为健康运行时的电机b~d 相的相电流;i'b、i'c、i'd为容错运行时的电机b~d 相的补偿相电流。
电机健康运行时,平均转矩和转矩脉动比为7.5 N·m 和96.4%(转矩脉动实际值为7.23 N·m);开路故障后,平均转矩和转矩脉动比为5.74 N·m和131.7%;开路故障后采用补偿电流控制,平均转矩和转矩脉动比为7.1 N·m 和106.0%(转矩脉动实际值为7.53 N·m)。电流重构技术有效地减小了故障相引起的转矩脉动,并获得了与健康状态相等的平均输出转矩。
双凸极电机的空载反电势并不是标准的120°方波,而是呈马鞍形,忽略马鞍形波形的谐波,双凸极电机也是运行在BLAC 模式。因此,文献[57]进一步研究了运行在BLAC 模式下双凸极电机的容错控制策略。
BLAC 模式下,电机相电流表达式为

开路故障时,电机相电流表达式为
电机健康运行时,平均转矩和转矩脉动比为2.94 N·m 和102.3%;开路故障后采用式(2)补偿电流控制,平均转矩和转矩脉动比为2.98 N·m 和93.5%。同样,电流矢量重构技术获得了与健康状态相等的平均输出转矩,并具有更小的转矩脉动。
2.4 容错型永磁磁通切换电机控制算法
由于具有绕组“互补性”优势,永磁磁通切换电机空载反电势具有高正弦度,适合运行在BLAC模式。
文献[58]研究了三相FSPM 电机的开路故障控制,BLAC 模式下,电机相电流表达式为

开路故障时,电机相电流表达式如下
电机健康运行和容错运行时平均转矩分别为6.7 N·m 和6.6 N·m,转 矩 脉 动 分 别 为58.9% 和62.7%。

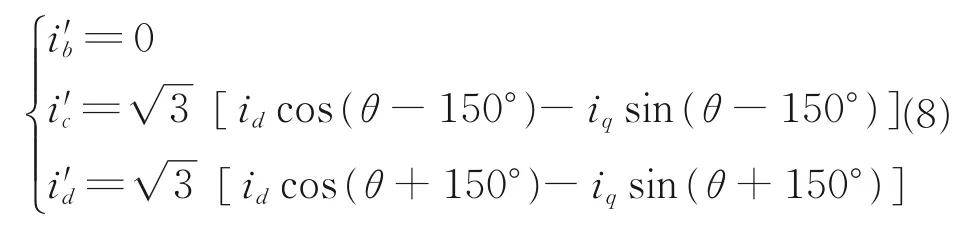
上述容错控制策略在三相FSPM 电机上实现以后,文献[59]进一步研究了其在六相FSPM 电机的应用。
电机在单相开路和两相开路情况下的重构电流分别如式(8,9)所示。
当六相12/10FSPM 工作在缺相状态,绕组“互补性”优势失去,部分健康相绕组中的反电势会出现一定幅值的低次谐波,基于此,文献[60]进一步研究了考虑谐波注入的容错控制策略,其重构电流为

谐波电流的注入,进一步减小了由谐波反电势引起的转矩脉动,提高了稳态性能。
类比于基于电流重构的矢量控制技术,基于电压矢量重构的直接转矩控制也被广泛提出,其核心思想:根据故障状态,重新推导基本电压矢量,确定其幅值和相角,并重新划分定子扇区[61⁃62]。
文献[62]研究了五相容错电机在A 相缺失时的电压矢量重构,如图30 所示,一般地,重构的电压矢量长度不再相等。可以直接利用图30(a)中的电压矢量直接建立开关状态表对电机进行控制,也可以利用上述基本矢量进行空间电压矢量合成,如图30(b)所示,减小一定的转矩脉动。

图30 A 相缺失时的电压矢量重构[62]Fig.30 Voltage vector reconstruction under phase A fault[62]
文献[63]将预测控制与电压矢量重构技术相结合,研究了磁通切换电机开路故障下的模型电流预测控制算法,同时提高了转矩控制的稳态和动态性能,控制框图如图31 所示。

图31 容错型磁通切换电机模型预测控制[63]Fig.31 Model predictive controlled fault-tolerant flux switching motor[63]
基于电流矢量重构技术的矢量控制和基于电压矢量重构技术的直接转矩控制算法均可以实现容错电机的故障补偿,但是,后者不存在电流闭环控制,具有更优秀的转矩动态响应能力。然而,对于直接转矩控制本身而言,仍然存在一个问题值得进一步研究。由于直接转矩控制的转速环采用的是PI 控制,转速的动态性能仍然受到该PI 参数的影响。PI 控制器属于线性控制,其特点如下[64⁃66]:
(1)PI 控制器的设计原则是使得转速的稳态误差为零,并在较宽的带宽范围内有足够的相角裕度。
(2)PI 控制器的设计是基于频域分析的方法,并不关注时域响应的最优效果。
(3)PI 控制器设计关注的是小信号模型的响应,它不能保证大信号动态性能的最优。转速环采用PI 控制,其典型的转矩转速优化曲线如图32 所示。为解决直接转矩控制算法中转速动态性能受PI 参数影响的问题,文献[67]研究了永磁磁通切换电机动态性能的优化算法。对直接转矩控制策略理论分析,其动态过程的转速性能受到PI 参数影响,不能达到快速收敛。针对在负载变化前后,电机的转速不发生变化,结合电机运动方程得到电机转矩冲量,从而精确求得逆变器发送前进矢量和后退矢量的时间,使得负载突变后转速只经过一次调节过程即可收敛,转速动态纹波最小,转速动态恢复时间最短,如图33 所示。

图32 转矩、转速优化曲线(PI 控制)[67]Fig.32 Optimization of torque and speed(PI control)[67]
文献[68⁃69]研究了单相开路情况下6/19 永磁磁通切换容错电机转矩冲量平衡控制策略,在电压矢量重构的前提下,推导了开路状态下转矩冲量平衡控制的计算方程,实现了开路状态下转速动态性能的最优化。
进一步,文献[70]实现了磁通切换电机单相及多相开路情况下转矩冲量平衡控制策略研究,重点分析了不同开路故障下重构电压矢量的差异对冲量平衡控制策略控制下动态性能的影响。
文献[71]实现了短路故障下容错型磁通切换电机的转矩冲量平衡控制,如图34 所示,采用前馈控制(DTC with feed forward control,FDTC),考虑了短路相扰动转矩的影响,修改了短路状态下转矩冲量平衡控制的计算方程,实现了短路状态下转速动态性能的最优化。转矩冲量平衡控制能使电机达到最优动态性能,然而,转矩冲量平衡控制与直接转矩控制(Direct torque control, DTC)之间的常规切换模式导致电机的转速和转矩仍然需要DTC 的重新调节才能收敛。文献[72]提出两种优化切换策略修正控制算法切换瞬间DTC 转速调节器或者电压空间矢量选择表的输入,从而实现控制系统的快速收敛,减小二次调节时间。对本节中容错算法的优化目标进行了总结,如表1 所示。

图33 转矩、转矩角和转速优化曲线(负载突变)[67]Fig.33 Optimization of the torque, torque angle and speed(load sudden change)[67]
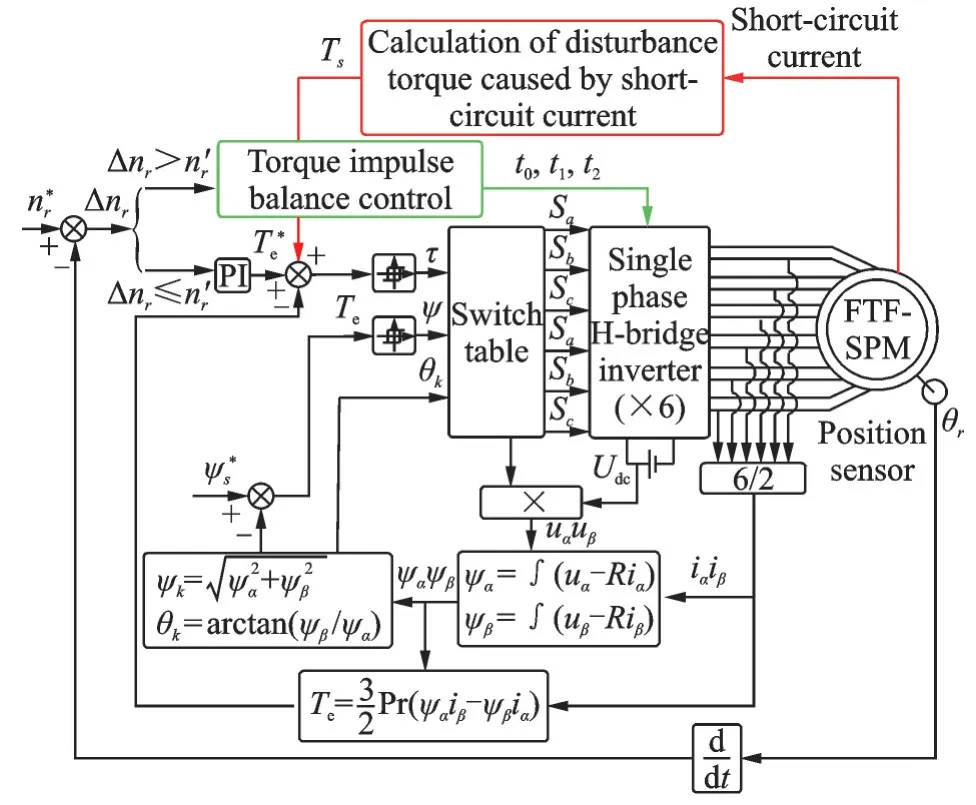
图34 短路故障下永磁磁通切换电机转矩冲量平衡控制框图[71]Fig.34 FDTC system with torque integral balance control method (IB-FDTC)[71]

表1 容错电机控制算法优化目标Table 1 Optimization objectives of control schemes for fault⁃tolerant machines
3 仿真及实验
3.1 电磁性能比较
综合比较容错型转子永磁式电机(拓扑1)、6/10 容错型FSPM 电机(拓扑2)、6/14 容错型FSPM电机(拓扑3)、6/7“E⁃core”容错型FSPM 电机(拓扑4)、加极靴6/7“E⁃core”容错型FSPM(拓扑5)、6/19 转子分段式多齿容错型FSPM 电机(拓扑6)的电磁性能,为其进一步的优化和应用提供理论依据依据。
图35(a)给出了容错型转子永磁式电机。在传统12/10FSPM 电机的基础上所提出的6/10 容错型FSPM 电机,其永磁体用量是12/10FSPM 电机的一半,在不填充永磁体的容错齿上,嵌入高磁阻的材料来提高各电枢线圈之间的磁隔离能力,如图35(b)所示。为了提高12/10FSPM 容错电机的转矩能力,并减小定位力矩,同时比较研究了6/14容错型FSPM 电机,如图35(c)所示。图35(d)为6/7“E⁃core”容错型FSPM 电机,其主要目的是在减少6/10FSPM 电机永磁体用量的基础上,同时提高电机转矩密度,而该电机“E”型铁芯的中间齿的存在使得各绕组具有一定的磁隔离能力。为进一步提高电机的短路电流抑制能力和磁隔离能力,将转子永磁型容错电机拓扑中的定子齿极靴设计应用到6/7“E⁃core”容错型FSPM 电机,如图35(e)所示。图35(f)为6/19 转子分段式多齿容错型FSPM 电机。
容错型永磁电机拓扑几何尺寸标识和具体电机参数分别如图36 和表2 所示。图37 给出了容错型永磁电机永磁磁链波形,从图36 中可以看出,拓扑1 和容错拓扑6 的磁链具有较高的对称度,拓扑2~5 由于没有绕组互补的优势,磁链波形在0~90°和90°~180°以及180°~270°和270°~360°分别存在差异。图38 给出了容错型永磁电机永磁磁链波形的幅值,从图38 中可以看出,对于磁通切换拓扑,拓扑4 具有最高的磁链幅值0.040 5 Wb,拓扑5 在拓扑4 的基础上,加入了定子齿极靴设计,其永磁磁链幅值降低为0.039 Wb。
图39 给出了容错型永磁电机定位力矩,其峰⁃峰值比较如图40 所示。从图40 可以看出,拓扑一定位力矩峰⁃峰值为0.8 N·m,拓扑2 的定位力矩最大,峰⁃峰值为5.6 N·m,拓扑6 的定位力矩峰⁃峰值为1 N·m。

图35 容错型永磁电机拓扑Fig.35 Topologies of fault tolerant permanent magnet mo⁃tor
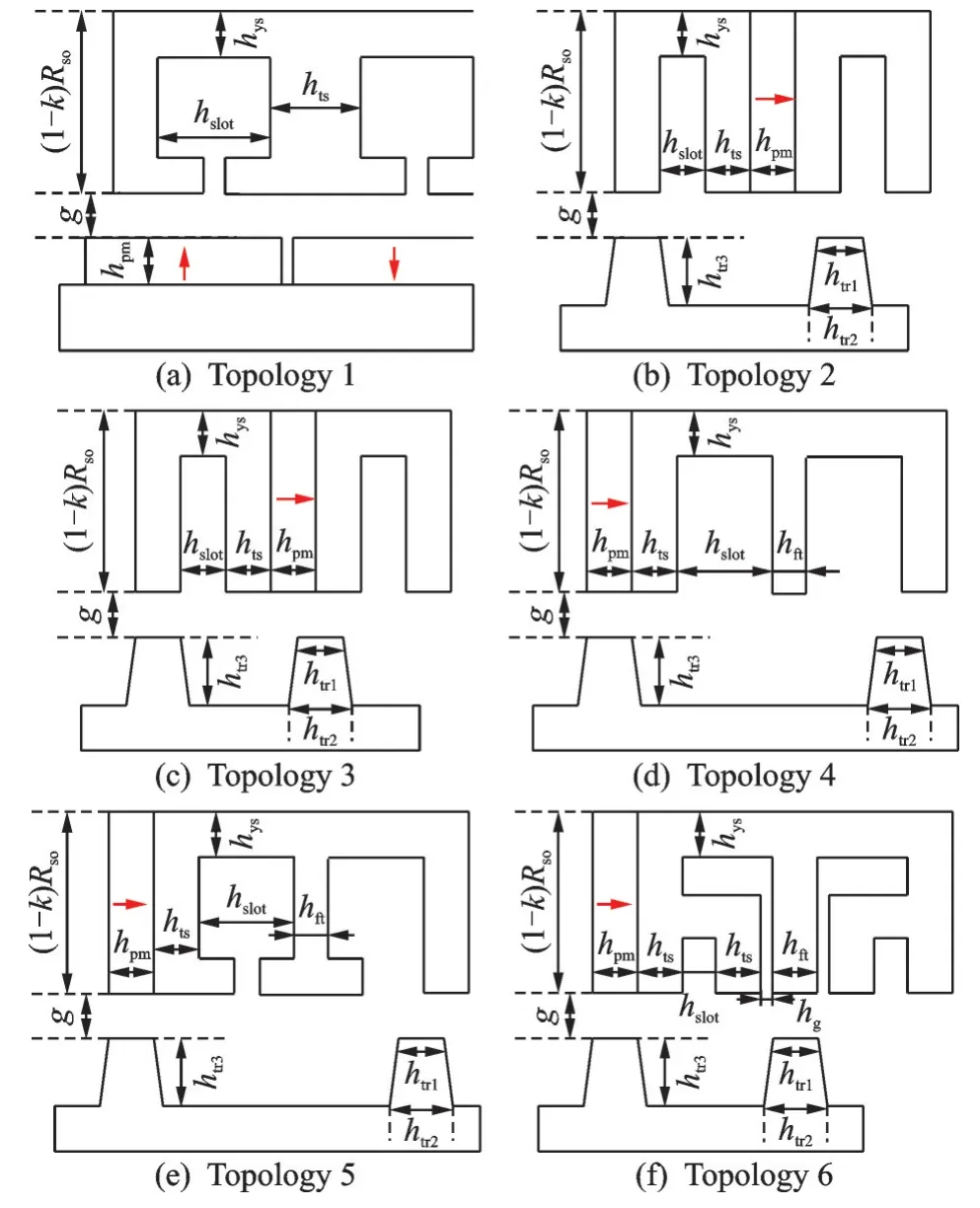
图36 容错型永磁电机拓扑几何尺寸标识Fig.36 Dimensions of fault⁃tolerant permanent magnet mo⁃tors

表2 容错型永磁电机拓扑电机参数Table 2 Parameters of fault⁃tolerant permanent magnet motor
容错型永磁电机自感和互感波形如图41 所示,自感平均值如图42 所示,互感平均值如图43所示,互感与自感比值如图44 所示。从图中可以看出,拓扑1 的极靴设计增加了电机的电感值。对于容错型磁通切换电机,拓扑6 具有最高的自感平均值(2.9 mH),拓扑5 在拓扑4 的基础上,引入了极靴的设计,增加了电机的自感值(1.25 mH 增加到2.45 mH),但这是以增加漏感、减低转矩密度为代价的。拓扑6 是从增加电枢绕组主磁路结构的磁导入手,提高电枢电感中的自感分量,电机保持了相对高的转矩密度。

图37 容错型永磁电机永磁磁链Fig.37 PM flux linkage of fault tolerant permanent magnet motors
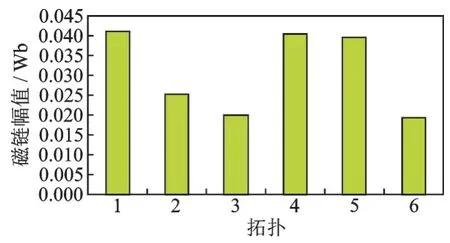
图38 容错型永磁电机永磁磁链幅值Fig.38 Magnitude of PM flux linkage of fault tolerant per⁃manent magnet motors

图39 容错型永磁电机定位力矩Fig.39 Cogging torque of fault tolerant permanent mag⁃net motors

图40 容错型永磁电机定位力矩峰-峰值Fig.40 Peak to peak cogging force of fault-tolerant perma⁃nent magnet motor
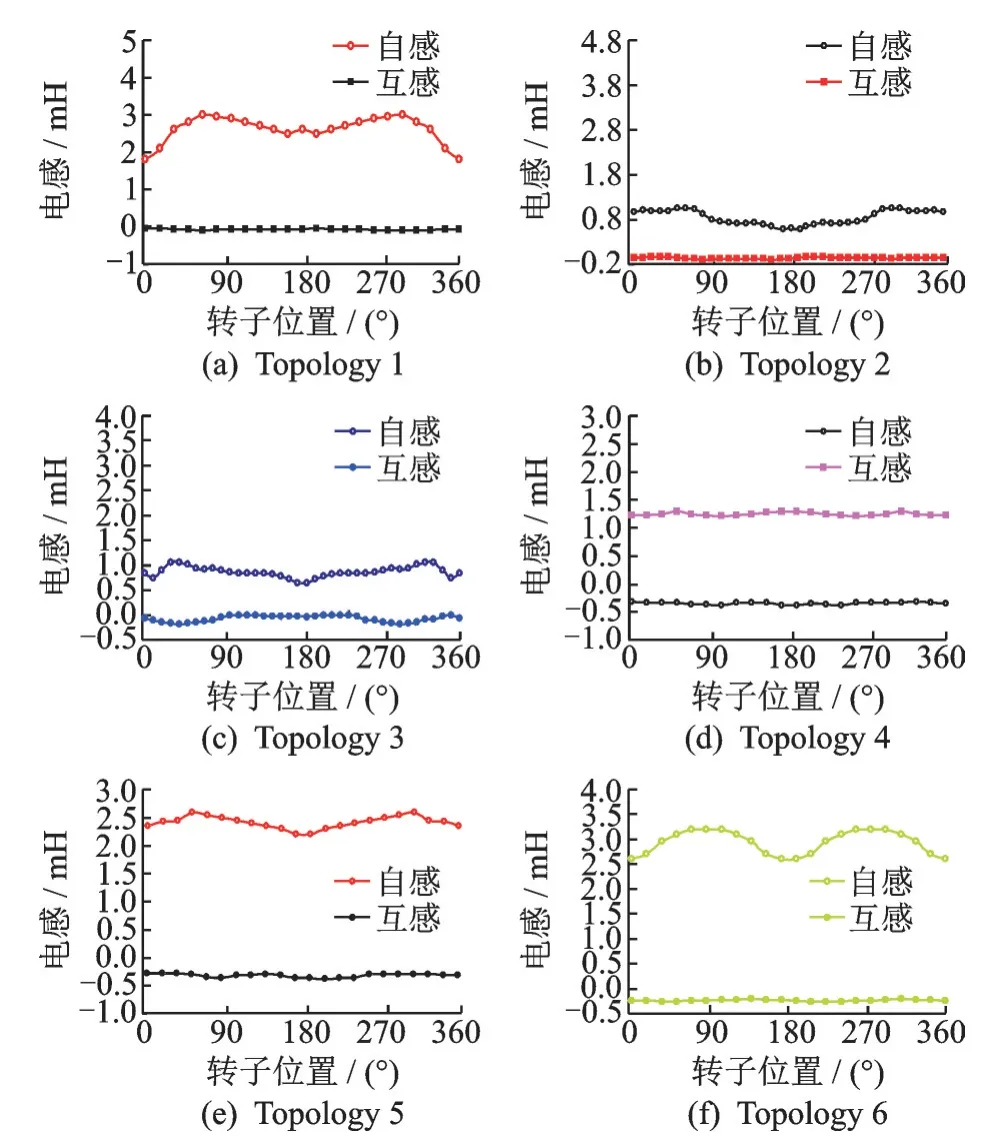
图41 容错型永磁电机自感和互感Fig.41 Self-inductance and mutual inductance of fault-toler⁃ant permanent magnet motors

图42 容错型永磁电机自感平均值Fig.42 Average self-inductance of fault-tolerant permanent magnet motor
对于互感,拓扑1~3 具有相对较小的互感,对于容错型磁通切换电机,拓扑2 和拓扑3 比其他3种拓扑具有相对较小的互感值,主要是因为容错齿上存在着高磁阻的隔磁材料。就减小互感值来看,容错齿加入隔磁材料(拓扑2 和拓扑3)比加入导磁磁料(拓扑4、拓扑5 及拓扑6)的隔磁能力更强。

图43 容错型永磁电机互感平均值Fig.43 Average mutual inductance of fault-tolerant perma⁃nent magnet motor

图44 容错型永磁电机互感/自感比值Fig.44 Mutual inductance/self-inductance ratio of fault-tol⁃erant permanent magnet motor
从图44 可以看出,在互感与自感比值这一指标上,拓扑6 要逊色于拓扑1~3。拓扑5 相对于拓扑4 降低了转矩密度,但是从互感与自感比这一指标上来看是值得的,互感与自感比由31%降低到12.5%。
图45 给出了容错型永磁电机永磁磁链与电枢电感比值,该比值决定了电机的短路电流抑制能力,从图45 中可以看出,拓扑6 短路电流抑制能力最强,其永磁磁链与电枢电感比值为6.7 A,短路电流实验值为6.2 A。

图45 容错型永磁电机永磁磁链/电枢电感比值Fig.45 Ratio of PM flux linkage to armature inductance of fault-tolerant permanent magnet motor
对于永磁电机而言,永磁磁链与电枢电感比值将决定电机的恒功率区域运行能力。容错型永磁电机为了实现短路电流抑制能力,其永磁磁链与电枢电感比值一般要求小于额定电流幅值,这样一来,容错型永磁电机在减小短路电流的同时,客观上也提高了电机的恒功率区域运行能力,图46 给出了电机在相同基速时(调节母线电压使得在基速相同)的转矩⁃转速特性。从图46 中可以看出,拓扑6 具有最强的恒功率区域运行能力,拓扑5 在拓扑4 的基础上加入了增加电感数值的极靴设计,很大程度的提高了电机的恒功率区域运行能力。各种容错型永磁电机恒功率区域运行能力大小与前文永磁磁链与电枢电感比值大小排列是一致的。

图46 容错型永磁电机转矩-转速特性Fig.46 Torque-speed characteristics of the fault-tolerant permanent magnet motor
图47 给出了容错电机在健康运行和单相短路运行时的效率。可以看出,每种拓扑单相短路运行的效率均要低于其健康运行时的效率,这主要是由于短路电流的存在以及在健康相中需要另外注入特定的电流来抑制短路电流产生的转矩脉动。拓扑6 具有相对较高的效率,健康运行和单相短路运行时的效率分别为92%和88%。

图47 容错电机效率Fig.47 Efficiency of fault-tolerant machines
综上所述,由于容错型永磁电机在保证电机高可靠性、高效率、高转矩密度的基础上,增强了永磁电机的恒功率区域运行能力,在混合动力汽车、电动汽车的驱动系统中也具有较强的应用潜力。
3.2 容错控制算法
容错型多齿永磁磁通切换电机样机如图48 所示。电机由原动机驱动,电机六相均开路,图49 为空载反电势波形。从图49(b)中可以看出,采用转子分段式结构,电机绕组的反电势具有高度的对称性和正弦性,这与前文理论分析和仿真结果相一致。
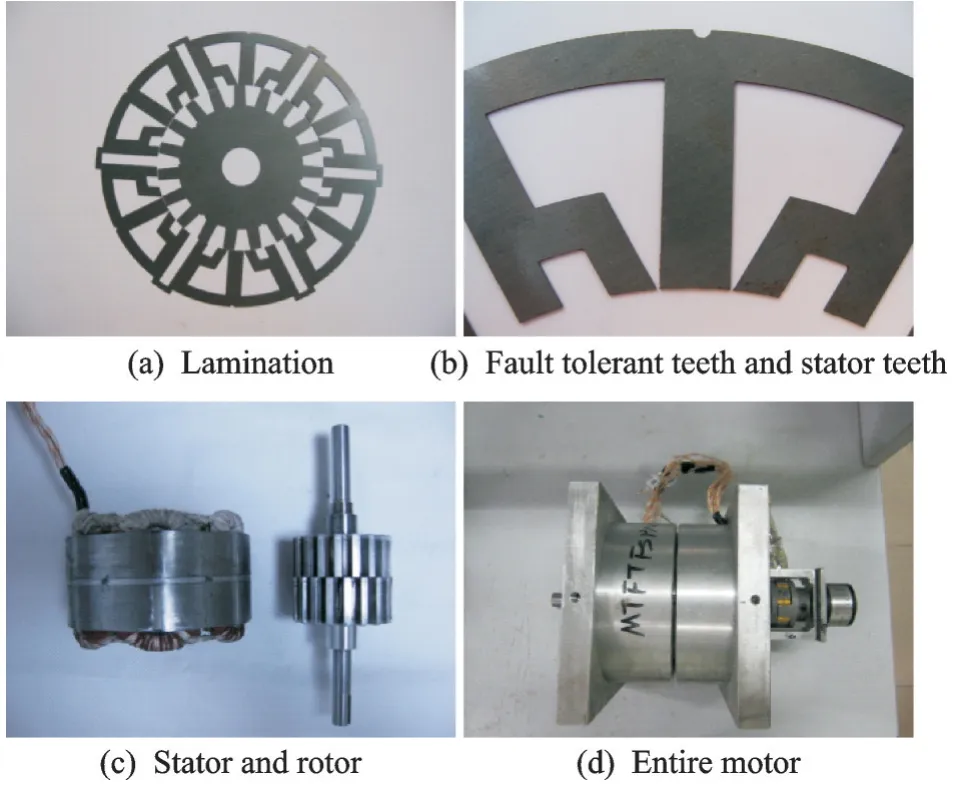
图48 容错型多齿永磁磁通切换电机Fig.48 Fault tolerant multi⁃tooth FSPM motor

图49 空载反电势(六相开路)[49]Fig.49 No⁃load back⁃EMF(six phases open⁃circuit)[49]
电机B 相短路的空载反电势波形如图50 所示。从图50(b)中可以看出,在B 相短路的条件下,其相邻相A 相和C 相的反电势与图49(b)相比,波形幅值和形状无明显变化,电机具有良好的磁隔离能力和模块性。
图51 给出了电机短路电流波形。在100 r/min时,短路电流幅值为6.2 A,在1 600 r/min 时,短路电流幅值为6.5 A,均小于电机的额定电流(8.6 A),电机具有良好的短路电流抑制能力。
FDTC 及TIB⁃FDTC 算法比较中参数设置如下:

图50 空载反电势(一相短路)[49]Fig.50 No⁃load back⁃EMF(one phase short⁃circuit)[49]

图51 短路电流[49]Fig.51 Short⁃circuit current[49]
调节时间ts:转速响应达到目标值并且误差稳定在目标值的2%以内所需要的最短时间。
峰值时间tp:转速响应达到目标值后达到第一个波峰所需要的时间。
转速跌落Δn:转速响应跌落的最大值。
超调比值σ:σ=(n(tp)-n(∞))/n(∞)×100%,n(∞) 为转速最终值,n(tp)为转速响应的动态峰值。
调节次数Z:动态过程中,转速响应的瞬时值等于n(∞)的次数。
图52(a)给出了DTC 控制下的实验结果,电磁转矩的频谱分析如图52(b)所示。图52(c)给出了FDTC 的实验结果,电磁转矩的频谱分析如图52(d)所示。
FDTC 算法的目的是引入前馈控制,减小DTC 算法在短路故障时由短路电流产生的转矩脉动,主要对比其稳态特性。从图52(b)和图52(d)中可以看出,采用FDTC,由Ts引起的转矩脉动可以得到有效的抑制。图52(a)中,转矩脉动的幅值为2.4 N·m,而52(c)中,转 矩 脉 动 的 幅 值 仅 为1.2 N·m。
TIB⁃FDTC 是为了解决FDTC 算法中转速的动态性能受转速环PI 控制器的影响问题,主要对比两者的动态性能。图53 给出了FDTC 的动态性能(P=8, I=0.006;P=6.8, I=0.000 4)。

图52 DTC 与FDTC 实验结果[71]Fig.52 Experimental results for DTC and FDTC[71]
图53(a)是典型的PI 控制下的动态转速波形,转速经过多次调节过程才能收敛,转速恢复时间为350 ms。
对于FDTC 控制系统,采用时域分析法对转速环PI 参数进行了优化,图53 中的动态转速波形仅仅存在一次超调过程,且转速收敛时间为105 ms。
图53 也给出了TIB⁃FDTC 的实验结果,动态过程中,转速的收敛时间为80 ms,且转速不存在超调。
FDTC 和TIB⁃FDTC 的动态性能比较如表3所示,根据表3 中的比较可以看出,与理论分析相一致,TIB⁃FDTC 算法可以使得转速收敛时间最短且不存在超调。
4 容错电机的研究展望与应用拓展
4.1 兼顾容错能力、转矩输出和过载能力的容错电机统一设计
容错型电机具有电感大和短路电流抑制能力强的优点,而电感大则意味着电枢绕组磁路的磁导相对较大,所以这一类电机更容易饱和,导致过载能力一般。例如,从文献[47⁃48]比较得出,与12/10FSPM 相比,6/19FSPM 电机采用多齿结构,提高了反电势系数和气隙磁导,即提高了电机在额定电流范围内的转矩输出能力以及短路电流抑制能力,然而,较大的气隙磁将导致电枢反应严重,随着电流增加,电机饱和加速,6/19FSPM 电机的过载能力要逊色于12/10FSPM 电机。因此,研究并建立兼顾容错能力、转矩输出和过载能力的容错电机统一设计理论十分必要:(1)客观梳理出各种容错电机拓扑在容错能力、额定转矩和过载能力之间的折衷范围;(2)指导建立新型电机结构的容错拓扑的设计理论与方法;(3)针对特定容错驱动场合和具体容错指标,使用统一设计理论可以快速、高效地指导容错电机拓扑的选型和参数设计。

图53 FDTC 与TIB-FDTC 实验结果[71]Fig.53 Experimental results for FDTC and TIB-FDTC[71]

表3 不同控制算法控制性能表Table 3 Comparison of different strategies
4.2 容错设计方法与理论与新型电机结构结合
近些年,磁场调制电机、定子分区式电机、记忆电机等新型电机的关注和研究逐年提升,其中:
(1)磁场调制电机基于磁齿轮的场调制原理,将转速较低的永磁磁场调制成转速较高的定子气隙磁场,实现了“自增速”效果,提高了空载反电势幅值和转矩密度,特别适合运行在直驱场合。
(2)由于永磁体和电枢绕组均置于唯一的定子上,传统定子励磁型电机的转矩密度受到了限制[73⁃75]。文献[76]提出具有更高转矩密度的新型定子分区式混合励磁电机。励磁源(永磁体、励磁绕组)和电枢绕组被分别置于两个定子区域,而转子由调制块组成,电机利用率和转矩密度提高显著。基于分区思想,种类繁多的定子分区式电机被提出[77⁃82]:图54(a)为 经 典 的12/10 永 磁 磁 通 切 换 电机,图54(b)为其所对应的12/10 定子分区式永磁磁通切换电机,可以看出,后者充分利用了原型电机的转子内部空间,释放了原型电机的定子空间,从而在相同的电枢铜耗下,可以提高电机的电枢安匝。文献[75]通过比较指出,在相同的电机体积和铜耗下,定子分区式电机可以比原型电机的转矩密度提高17%左右。
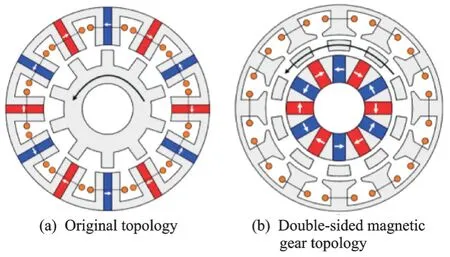
图54 12/10 永磁磁通切换电机[71]Fig.54 12/10 FSPM motor[71]
同理,图55(a)为6/10 E⁃core 容错型永磁磁通切换电机,图55(b)为其所对应的6/10 E⁃core 容错型永磁磁通切换电机。后者在具有强容错能力的同时,又显著地提高了转矩密度。
(3)记忆电机继承了混合励磁电机磁场调节能力强、转速运行范围宽的优势,进一步改进了混合励磁机理[41,83],改变了永磁体和励磁绕组的工作模式和“合作关系”,可以使得稳态运行时励磁绕组铜耗为零,提高了电机的效率和功率密度[84]。
典型的单定子记忆电机和双定子记忆电机如图56 所示[84]。励磁绕组在实现永磁体的剩磁改变以后,即进入稳定状态,励磁电流为零,减小了励磁损耗,提高了电机效率。

图55 6/10 永磁磁通切换电机[84]Fig.55 6/10 FSPM motor[84]

图56 记忆电机[84]Fig.56 Memory motor[84]
上述两种记忆电机在相邻两相之间加入容错齿或者采用非交叠集中式绕组结构分别可以得到6 相或者3 相容错型记忆电机。
在研究经典的开关磁阻电机、永磁同步电机、永磁双凸极电机和永磁磁通切换电机的容错拓扑中所形成的设计方法与理论可以应用到以上3 种新型结构中,根据新型电机特有的结构与磁路进行“创新型移植”,不经可以丰富电力作动系统用容错电机的拓扑选择,而且可以提升新型电机在风力发电、混合动力汽车以及船舶驱动等领域应用时的可靠性和容错性能。
4.3 容错型航空发电机拓扑与设计理论
多电飞机技术可以极大地提高飞机的可靠性、维修性和地面保障能力,多电飞机电源系统由主电源、应急电源和二次电源3 部分组成,主电源由发动机驱动发电机和保护装置等组成。当主电源发生故障时,应急发电机系统将作为应急电源。不管是主发电机还是应急发电机,都应具备较强的容错能力。虽然电力作动器用容错电机一般工作在电动状态,但是其容错设计理论和方法是可以给航空容错发电机系统提供借鉴。需要注意的是,除了以上兼顾容错能力、转矩输出和过载能力的容错电机统一设计思想,特别地,对于发电机系统,还必须重点考虑以下3 点:(1)宽转速范围下的电压调节能力;(2)宽转速范围下的磁场调节范围;(3)故障状态下的不间断供电能力。
4.4 高动态性能控制方法
基于电流矢量重构的矢量控制技术和基于电压矢量重构的直接转矩控制技术已经成功应用于容错电机的故障状态的控制系统中,可以补偿平均转矩,减小转矩脉动。矢量控制与直接转矩控制的转速控制器采用的都是PI 控制器。与PI 控制器相比,PID 控制器一定程度上提高了被控量的动态性能,但是动态性能很难做到最优[32]。不管是PI 控制器还是PID 控制器,都属于线性控制,其特点如下:(1)线性控制器的设计原则是使得转速的稳态误差为零,并在较宽的带宽范围内有足够的相角裕度;(2)线性控制器的设计是基于频域分析的方法,并不关注时域响应的最优效果。
因此,研究新型的高动态性能控制算法,实现目标控制量(转速)的最优动态性能具有十分重要的学术价值。同时,研究传统PI 控制器(稳态)与高动态性能控制器(动态)的平滑切换也是必然趋势。
5 结 论
原始结构的开关磁阻电机、转子永磁式电机、定子永磁式电机通过绕组结构与磁路的改进,可以得到相对应的容错电机,适合在多电飞机电力作动系统中应用。本文从拓扑结构与控制策略两方面对容错电机的研究现状与最新进展进行了分析与归纳,总结出如下两方面结论。
拓扑结构方面:
(1)容错电机系统的电气隔离能力可以通过每相绕组采用一套独立的“H”桥变换器来实现。
(2)容错电机系统的物理隔离能力和热隔离能力可以通过采用非交叠集中式绕组来实现。一般地,与交叠集中式绕组相比,采用非交叠集中式绕组后,电机的电感值增加,电枢反应增强,电枢磁场的磁路更容易饱和,所以电机的过载能力有所下降。
(3)对于容错电机的磁隔离能力,半周期工作的开关磁阻电机由于特殊的工作原理和磁路结构,其本省即具有较小的互感值;而对于永磁类电机,则需要采用非交叠集中式绕组结构,同时,容错齿(隔磁齿)的结构对磁隔离能力影响很大,在容错齿(铁磁材料,高磁导)中设置高磁阻的磁障(空气、永磁体或者不锈钢),变“导”为“阻”,可以进一步提高磁隔离能力。
值得一提的是,在容错齿(铁磁材料,高磁导)中设置空气磁障提高了容错电机的模块性,极大程度地降低了电机的加工难度。
(4)短路电流抑制能力除了受到采用绕组结构的影响之外,还重点受到电机磁路结构的影响,主要表现如下:
①转子永磁式电机中的表贴式永磁同步电机中,电枢磁场与永磁体磁场式串联关系,所以,在采用非交叠集中式绕组的前提下,还必须通过定子极靴、槽口漏感设计来增加漏感。漏感的增加使得转矩密度有所降低。转子永磁式电机中的嵌入式永磁同步电机、永磁同步磁阻电机电枢磁场的磁路对永磁体影响小,可以不增加漏感来抑制短路电流。
②定子永磁式电机中的永磁双凸极电机、永磁磁通切换电机除了永磁体工作安全、退磁风险小的特点之外,电枢磁场与永磁体磁场式并联关系,所以,直接采用非交叠集中式绕组、不增加漏感即可提高抑制短路电流能力,在提高容错能力的同时,可以保持较高的转矩输出能力。
③容错型定子永磁式电机存在着定子励磁源集中、磁路易于饱和的缺点,容错型磁齿轮双边电机可以保证电机容错能力的同时,充分利用电机空间,进一步提高了电机的转矩输出能力。
控制策略方面:
(1)当容错电机工作在开路状态,可以采用基于电流矢量重构的矢量控制算法来减小转矩脉动,提高稳态性能。其核心思想的重构后的电流综合矢量与健康运行时相同。短路运行时,在电流矢量重构时考虑短路电流产生的扰动转矩即可。
(2)基于电压矢量重构的直接转矩控制通过重新推导开关电压矢量并建立定子磁链分区,同样可以快速地实现转矩跟踪并解决开路相的干扰问题。短路运行时,将短路电流产生的扰动转矩通过前馈控制思想引入到给定转矩中即可。
(3)与基于电流矢量重构的矢量控制算法相比,基于电压矢量重构的直接转矩控制可以在一定程度上提高转矩的动态性能,但是两种算法中转速的动态性能都受到转速环PI 参数的影响。
(4)在健康状态和故障状态下,采用转矩冲量平衡控制,使得电磁转矩按照最优轨迹变化,转速经过一次调节过程即可收敛,没有超调,动态时间最短。
