核辐射复杂环境下新型智能拆解机器人系统设计研究
2021-03-29陈少南邓志燕刘帅
陈少南 邓志燕 刘帅
(中广核研究院有限公司,深圳,518124)
0 引言
随着大量早期民用核电反应堆陆续结束运行,全球核工业预计将在未来10~15 年迎来历史上第一轮退役高潮。退役阶段一般包含5 个步骤:建筑物、系统、设备去污;系统、设备拆除;建(构)筑物拆毁;场址环境整治;场址移交/封存监护。在核设施退役过程中,无论采用立即拆除,还是安全封存一段时间后再拆除的方式,甚至采用就地处置的方式,均要对待退役核设施进行拆解作业。此外,新建设核电站尽管在设计阶段对可能发生的意外情况做了预防和缓解,但由于运行设备的老化和操作失误等原因,仍有可能引发严重事故,历史上发生的福岛核事故、切尔诺贝利核事故及三哩岛核事故,对世界核能发展均产生了重大影响。在严重核事故中会伴随着一些爆炸产生,这些爆炸不仅会严重损坏核反应堆内部结构,同时也会制造出一些障碍物,阻塞一些关键通道,严重影响后续的抢险措施[1-3]。
针对核退役及核应急救援工况下的道路清障、放射性污染设备拆除及搬运、重混凝土钻凿切割、剪切等重型作业需求,本文研制一种适应核辐射复杂环境下的新型拆解机器人,降低施工人员受辐照剂量,提高作业效率及智能化程度。
1 国内外研究现状
由于部分国家的军用或民用核产业发展较早,部分核设施已退役或正面临退役,故国外核产业发展较早的国家,其退役技术也相对成熟和先进,开发了系列的核设施退役专用设备。瑞典Brokk 公司积累了近40 年核工业应用的经验,从1983 年第一台机器人用于瑞典R1 反应堆退役开始,已有600 多台Brokk 机器人用于世界核工业领域中,在放射性废物回取和处置、核设施退役拆除、储罐拆除和核设施去污及核事故应急救援等方面有广泛应用。在福岛核事故中,该公司投入10 台拆除机器人用于放射源捡取回收、污染物收集装桶、瓦砾清除和清障等[4]。

图1 应用于福岛核电站的Brokk 800D 重载作业机器人

图2 应用于退役热室及退役试验堆的Brokk 拆除机器人
瑞典Husqvarna 公司的Hakusubaner(DXR-140 改造品)负责事故后的污染物清理去除和固体废物移动工作,并用于福岛核电站反应堆厂房一层中部的去污作业。德国TopTec 公司生产的TopTec 系列拆除机器人,主要用于工业生产和各类钢筋混凝土建筑的拆除,芬兰Avant 公司在原来FINMAC F16 的基础上设计了Avant Robot185 机器人,主要用于建筑拆除。

图3 DXR-140 拆除机器人(左)及Avant Robot185(右)拆除机器人
近年来,国内企业在分析并吸收国外产品技术的基础上,结合中国工程机械的实际,开发研制了面向建筑拆除等应用场景的多功能遥控拆除机器人,如惊天液压公司生产的GTC 系列、恒创智能装备有限公司生产的HCR 系列破拆机器人[5]。此外,国内部分高校及科研院所针对核工业特殊场景需求,在Brokk 破拆机器人基础上进行了防辐射设计及精细作业机械臂研究[6]。

图4 惊天液压(左)及恒创智能装备公司(右)研制的拆解机器人
2 新型智能拆解机器人系统
2.1 总体介绍
目前国内外典型的核退役及应急救援拆解机器人采用履带式移动底盘,具有较好的路面通过性,操作人员使用操作盒实现就地操作,作业机械臂采用单关节控制模式,然而操作灵活性及整机智能化程度不高,特别是现场环境通道狭窄、辐照剂量分布不明确、远距离无线通信受阻等不利因素均对传统的拆除机器人控制模式及作业效率提出了较大挑战。
本文以核退役及核应急救援复杂环境下的重载作业任务为目标,特别是针对核设施混凝土破除、金属设备切割与拆除、放射性废物回取与处理等情况,研制一种新型智能拆解机器人。其设计思路是,利用常规工况下的柴油机动力及应急工况下的锂电池双动力系统,当常规动力故障失效时,机器人通过自检与借助远程监控诊断平台系统进行应急操作,紧急释放高放废物,收回工作臂,驶离放射性场所;考虑到机器人移动机构复杂环境适应性能力,设计大负载变形轮行走装置结构,其同时具备轮式机动性和履带式复杂路面适应性的优势,保证机器人能适应各种路面工况;作业臂设计为三折臂结构,每个关节配置倾角传感器,采用变量柱塞泵电液比例液压系统,对各液压缸和液压马达进行闭环调节,实现机械臂的多轴联动和轨迹规划控制设计;机械臂末端搭载快换机构配置多种作业属具,通过远程遥控实现液压机械臂与作业属具的快速对接,最大程度丰富作业功能;基于激光雷达和双目视觉传感器融合技术,同时定位与地图构建、动态避障与路径规划,实现拆解机器人在复杂环境下的自主移动。
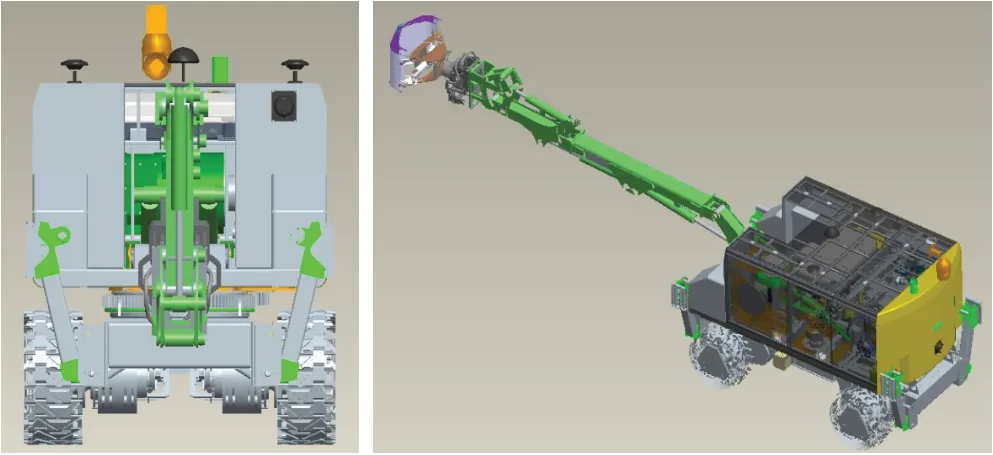
图5 具有变形轮移动装置的新型拆解机器人总图
2.2 变形轮移动机构设计
在严重核事故后,现场存在瓦砾散落、楼梯堵塞、障碍物复杂多样且随机分布等复杂非结构化恶劣环境,这对应急拆解机器人的运动灵活性、越障性和环境适应性提出了更高的要求。轮式移动机构具有较高的机动性,但移动易受地形环境限制;履带式移动机构具有越野性好、爬台阶、越障性能好等优点,但其能耗大、灵活性差,且工作效率低。故此,本文设计一种大负载轮履复合式变形轮移动机构,可根据不同地形及工作场景,在轮式及三角履带式两种形态进行切换,兼具高机动性、高适应性的优点。
大负载液压驱动轮履复合式变形轮装置总体结构如图6 所示,包括驱动模块、变速箱以及轮体三部分。其中,驱动模块为轮体运动提供驱动力;变速箱进行两种运动模式切换;轮体为变形轮工作及变形的主要执行机构,可根据模式切换指令进行圆形和三角形运动状态切换,直接与地面接触,并与地面摩擦产生前进动力。
该变形轮工作原理如图7 所示。机器人在轮式状态时,轮毂与中心轴连为一体,变形油缸伸出,带动变形瓣将履带撑开至圆形状态,驱动模块通过中心轴旋转将动力传递至履带链轮,驱动履带及所有构件转动。机器人在履带式行走状态时,轮毂与中心轴分离,变形油缸缩回,带动变形瓣将履带回缩至三角形状态,驱动模块通过中心轴旋转将动力传递至履带链轮,驱动履带转动,其他构件(轮毂等)保持静止。
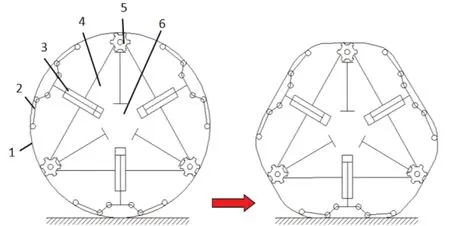
图7 变形轮工作原理示意图
为了验证大负载变形轮的轮履变换能力,笔者搭建试验平台进行变形功能和负载承受能力测试(如图8 所示),试验表明,变形轮可稳定地在轮式和履带式之间变换。

图8 变形轮装置轮式形态及三角履带形态变换试验测试
2.3 大负载多关节液压机械臂
核退役及应急拆解机器人机械臂采用三折臂四自由度结构设计,机械臂油缸配置倾角传感器,回转平台配置编码器,实时检测关节角度,并通过电液控制系统对各液压缸及马达进行闭环调节,实现精确定点破拆和搬运等精细作业。
为实现机械臂的自主运动控制功能,笔者使用D-H法搭建其运动学模型,对给定的机械臂基坐标系下的目标位置,使用逆解求出满足能量最优的关节角逆解值,再运用三次样条曲线规划法,求出每个采样时刻的各液压关节位置、速度和加速度值,进而对各油缸及液压马达运动误差使用PID 控制进行调节,以实现机械臂自主运动控制的目的。
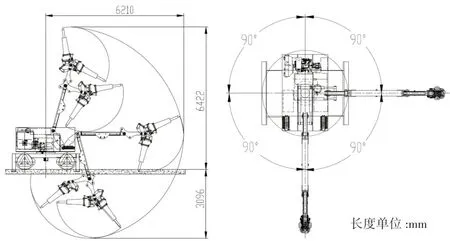
图9 拆解机器人作业空间
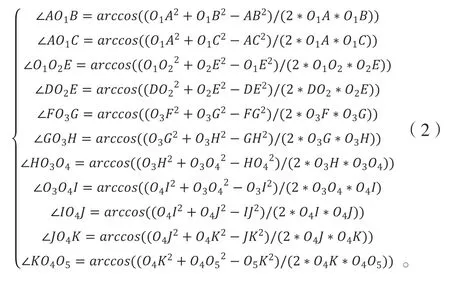
图10 为多关节液压机械臂结构简化图,根据液压缸最大运动长度和最小运动长度,可得到机械臂关节角约束模型,其中关节角1()是机械臂基座回转角,可旋转360°,关节角6()是末端工具旋转角。
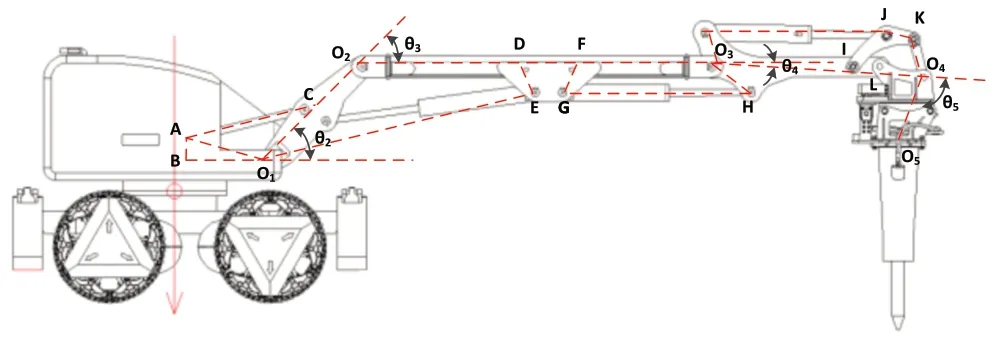
图10 多关节液压机械臂建模
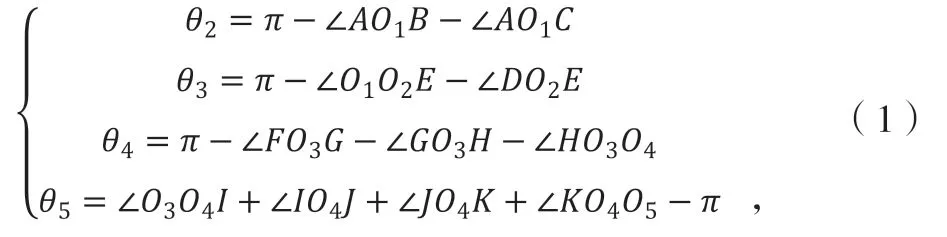
式(1)中的角度参数见式(2):
建立拆解机器人液压机械臂的D-H 连杆模型,如图11 所示,相应的连杆参数表见表1 所示。
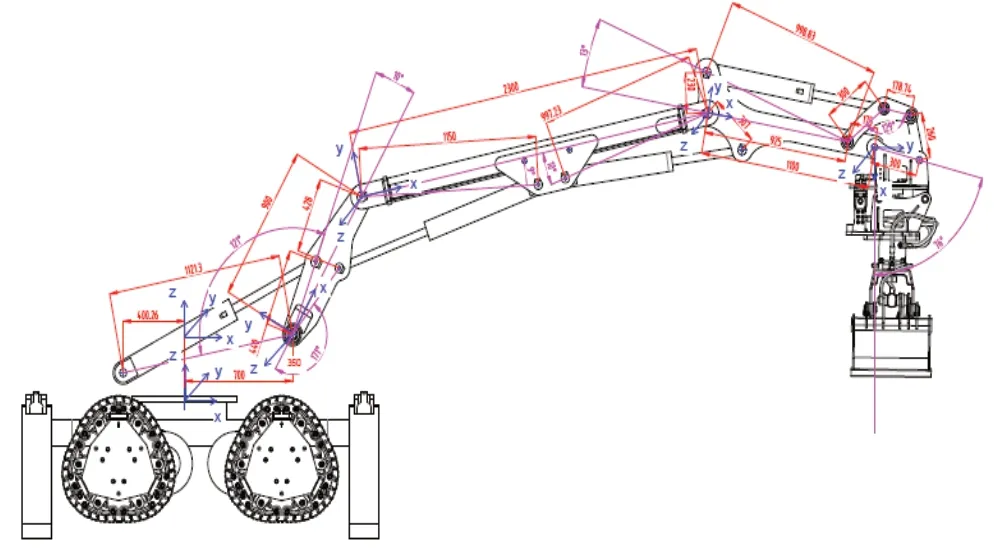
图11 多关节液压机械臂物理参数及D-H 连杆模型
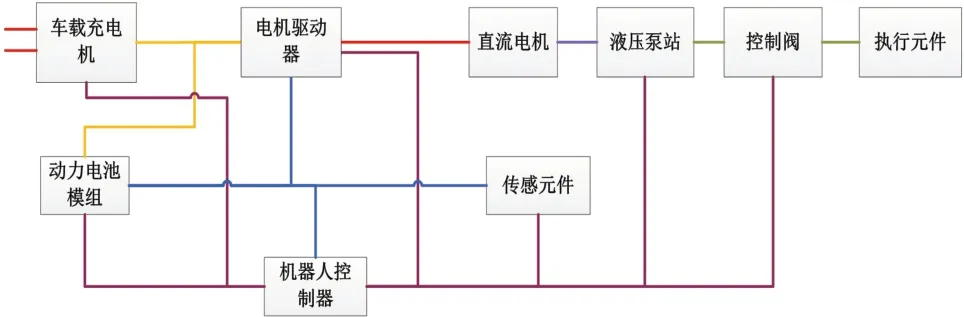
图 12 应急动力系统架构图
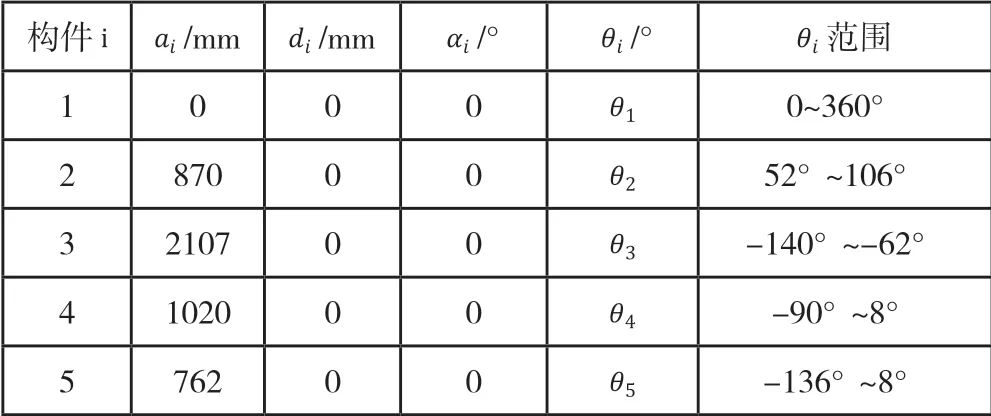
表1 机械臂D-H 连杆参数表
不考虑回转,机械臂末端执行器空间位姿描述为:
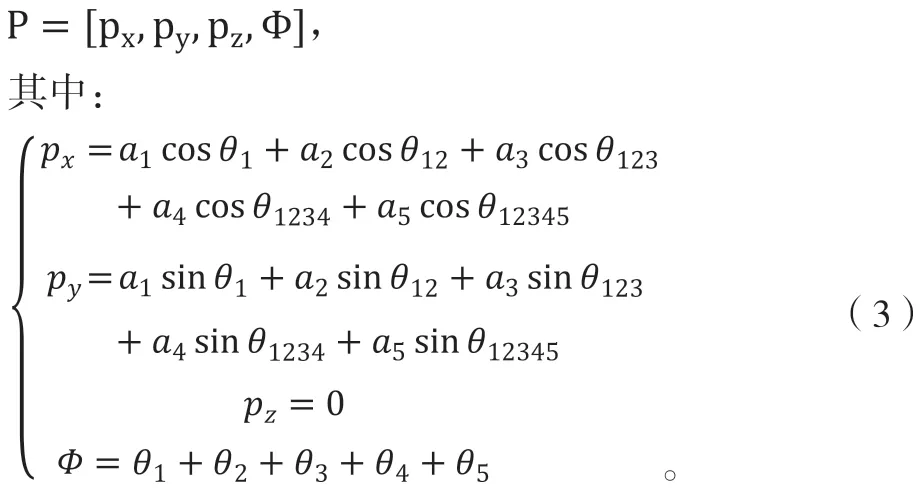
已知各个油缸行程,即各个关节的旋转角度,具体见公式(1)和公式(2),再根据式(3)可求得执行器的位置及姿态角,最后采用几何法迭代求解逆运动学的各关节角的适合解。
该机器人机械臂各油缸采用电液比例控制阀进行控制,各油缸设备倾角传感器由电液比例控制系统实现位置的PID 控制。车载激光定位平台可获得视觉目标点的坐标,视觉坐标系和机械臂坐标系使用基于回归模型最小二乘算法进行标定,可获得手眼坐标系的转置矩阵。
2.4 双动力平台设计
拆解机器人采用柴油机动力作为系统主动力来源,并配备磷酸铁锂电池作为应急动力源,当主动力系统因故障失效时,机器人通过自检与借助远程监控诊断平台,自动切换至应急电池组动力系统,操作人员进行应急操作,如释放放射性废物、收回机械臂、驶离放射性场所,避免应急救援事故现场二次事故/损坏发生。
当拆解机器人控制系统检测到常规动力系统异常时,控制逻辑程序输出接触器闭合线圈,启动应急动力电池组,由高压蓄电池提供动力,供直流发动机运动,启动液压泵,保证拆解机器人液压系统正常工作,应急动力系统架构图见图12 所示。
同时,车载控制器实时将应急状态(应急电池剩余电量)反馈值远端操作界面,应急动力系统启动处理流程图见图13 所示。
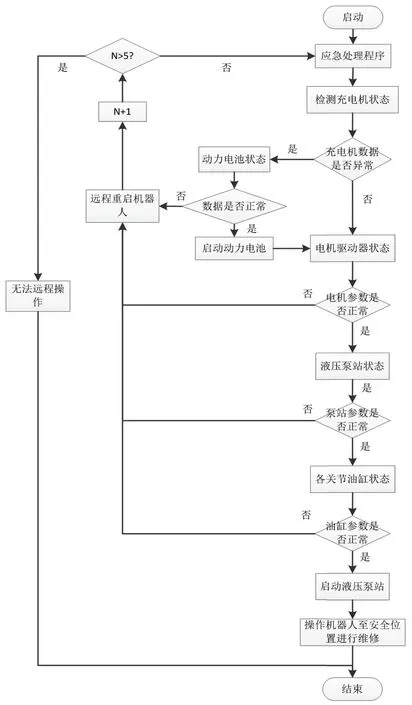
图13 应急动力系统启动处理流程图
2.5 拆解机器人定位与自主导航
笔者考虑到拆解机器人主要是在建筑物内的工作场景,卫星信号不稳定,因此采用航迹推算并结合地图匹配定位法进行信息融合,在没有GNSS 时也能实现较小的定位误差。
导航定位系统主要由三维激光雷达、组合惯导、里程计组成。三维激光雷达选用Velodyne HDL-32E,这是一款32 线、垂直视场角40°、水平视场角360°的多线激光雷达,能够提供高精度的环境障碍物探测点云数据。组合惯导选用NovAtel PwrPak7D-E1,采用GNSS 和INS深耦合组合导航技术,利用GNSS 数据对INS 的系统误差进行修正,从而保证位置和姿态精度。里程计选用增量式光电编码器,提供4 个变形轮的运动距离信息。
将三维激光雷达采集的点云数据压缩到二维平面,结合组合惯导和里程计航迹推算得到的机器人位置信息,建立和实时更新现场环境地图,同时实现机器人在地图中的定位。根据已有地图进行全局路径规划,并在机器人运动过程中,通过实时的障碍物信息进行局部路径规划,实现机器人自主避障行走。在车体后方安装毫米波雷达(ARS408 毫米波雷达),提供碰撞检测告警信息,用于在倒车时弥补三维激光雷达的视野盲区。
在Gazebo 仿真平台下,对拆解机器人SLAM 算法进行仿真,仿真环境以及建图与全局路径规划效果见图14所示。
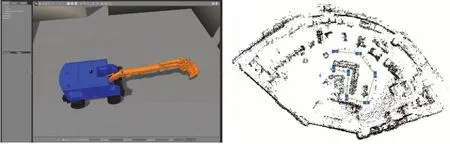
图14 拆解机器人SLAM 仿真场景搭建及建图与路径规划效果
2.6 拆解机器人耐辐照设计
拆解机器人应用于核辐射环境中,具备一定的耐辐射能力,但是还需对机器人进行抗辐射加固设计。机器人系统抗辐射加固设计采用屏蔽防护、系统后置以及电子系统抗辐射加工设计等综合设计方法,通过合理规划机器人各功能区的布局、分布设计电路并将部分电子系统进行抗辐射加固设计来实现[7]。这包括抗辐射器件选择、抗辐射电路设计、屏蔽和电子系统后置以及软硬件结合的系统抗辐射加固。同时,模拟辐射环境,测量辐射强度和目标受损参数,通过辐射环境设置,设备受损参数测定以及后续数据分析等辐射试验,验证加固措施。
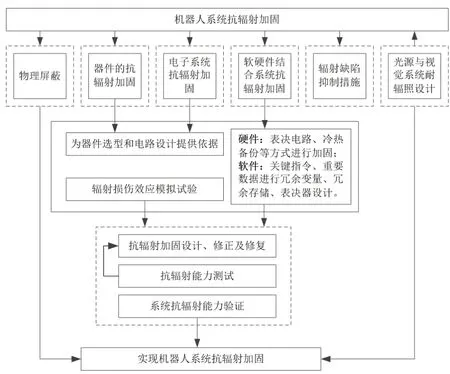
图15 拆解机器人系统抗辐射加固设计方法
2.7 拆解作业测试
针对核退役及核应急现场作业工况,结合现场环境复杂、作业空间有限、操作对象各异、负荷情况多变等特点,拆解机器人机械臂末端配套液压锤、液压剪及抓斗等多种模块化作业属具,通过机液快换装置实现机械臂与作业属具机械和液压接口的快速自动连接,避免人员进到危险区域现场更换,最大程度地丰富了拆解机器人的作业功能。
笔者在测试场地搭建混凝土结构块、钢筋、钢板等,测试拆解机器人的一键式自动拆除、远程操作剪切及抓斗等功能,顺利完成任务指标要求。图16 和图17 分别为拆解机器人系统实物测试照片。

图16 拆解机器人系统整机图

图17 拆解机器人末端属具抓、凿、剪、更换作业图
3 总结
本文针对核退役及核电应急救援工况下的大负载作业需求,设计了一种基于变形轮移动装置的新型拆除机器人,变形轮移动装置可根据不同地形及工作场景,可在轮式及三角履带式两种形态之间进行切换,兼具高机动性、高适应性的优点;通过电液比例控制系统实现精确定点破拆、抓取和搬运等精细作业;设计了柴油发动机及应急锂电池双动力平台,提高系统在事故工况下应急处理的能力;同时,基于激光雷达、固态激光雷达及视觉等多传感器信息融合,设计了拆解机器人的地图构建及定位导航系统,提高系统的智能化程度;采用屏蔽及核心电气部件抗辐射加固等综合设计法,进行整机的耐辐射设计。最后,通过在试验场地充分测试,基于变形轮移动装置的新型拆除机器人各项性能指标得到有效验证,具备智能化、高效率、安全可靠及环境高适应性。